-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
International Journal of Statistics and Applications
p-ISSN: 2168-5193 e-ISSN: 2168-5215
2022; 12(1): 1-9
doi:10.5923/j.statistics.20221201.01
Received: Nov. 5, 2021; Accepted: Dec. 10, 2021; Published: Jan. 13, 2022

EMS Response Time Analyses for a Rural County Using Geographically Weighted Regression with Different Kernel Weighting Functions
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLSneha R. Vanga1, Phillip M. Ligrani1, Mehrnaz Doustmohammadi2, Michael Anderson2
1Department of Mechanical and Aerospace Engineering, University of Alabama in Huntsville, Huntsville, AL, USA
2Department of Civil and Environmental Engineering, University of Alabama in Huntsville, Huntsville, AL, USA
Correspondence to: Phillip M. Ligrani, Department of Mechanical and Aerospace Engineering, University of Alabama in Huntsville, Huntsville, AL, USA.
| Email: |  |
Copyright © 2022 The Author(s). Published by Scientific & Academic Publishing.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

A Geographically Weighted Regression (GWR) is considered to compare results provided using two different kernel weighting functions: adaptive bi-square kernel and adaptive Gaussian kernel. To provide a baseline reference comparison, resulting data are also considered relative to Global Regression Analysis (GRA) calculations, which are obtained without the inclusion of geographical variability location data. For the analysis, data associated with a total of 214 crash cases for the dates between January 2016 and December 2019 are studied for a rural county in Alabama. Associated crash records are extracted from the Critical Analysis Reporting Environment (CARE) database. Six independent variables, including travel time, time of the day, day of the week, weather, lighting conditions, and crash severity are modeled in regard to their influences on EMS Response Time (ERT). Results from GWR analyses, using both weighting functions, show important quantitative and qualitative differences in regard to coefficient values as each independent variable is individually addressed, especially as the number of considered variables is altered, relative to the addressed variable. Mean square (MS) values associated with GWR Residuals are 276.6 for the adaptive bi-square kernel function and 332.4 for the adaptive Gaussian kernel function. Such differences within ANOVA table data indicate that GWR analysis, with an adaptive bi-square kernel weighting function, often yields improved model performance, relative to GWR with an adaptive Gaussian kernel weighting function. ANOVA table data also evidence improved model performance with the inclusion of geographical variability location data.
Keywords: Geographically Weighted Regression, EMS Response Time, Road Traffic Injuries
Cite this paper: Sneha R. Vanga, Phillip M. Ligrani, Mehrnaz Doustmohammadi, Michael Anderson, EMS Response Time Analyses for a Rural County Using Geographically Weighted Regression with Different Kernel Weighting Functions, International Journal of Statistics and Applications, Vol. 12 No. 1, 2022, pp. 1-9. doi: 10.5923/j.statistics.20221201.01.
Article Outline
1. Introduction
- Recent reports from the World Health Organization (WHO) indicate that road traffic injuries (RTIs) account for about 1.3 million deaths worldwide annually [1,2]. Of particular concern is a continual increase of RTI rate of mortality [3]. Conclusions from recent investigations indicate that most RTI deaths occur prior to hospital arrival, either at the at the crash scene, or during patient transport [4,5], that 86 percent of trauma-related deaths occur in the pre-hospital phase [6], and that 39 percent of associated deaths are preventable [4,6]. Within the United States, motor vehicle crashes (MVC) also continue to be a leading cause of death and injury, in spite of important improvements to road infrastructure, vehicle design, and traffic safety legislation [7]. Because emergency medical services provide the critical link between injury and definitive critical care [8], the time between the occurrence of a MVC and delivery of a patient to this care is a vital factor in regard to the potential and probability of MVC mortality [9]. The importance of EMS travel delays and arrival times, and the strong connections between MVC’s, EMS Response Time (ERT), and patent mortality, are further illustrated by numerous additional studies [10-17]. EMS Response Time (ERT) is the travel time interval between the initial reporting of a crash and the arrival of EMS personnel at the crash site [18,19,20]. Many factors influence the magnitude of ERT, such as crash site location (rural, suburban, or urban), road conditions, weather conditions, locations of ambulances within the service zone, transportation times, measures of rurality, on-scene and transport times, access to trauma resources, and traffic safety laws [11,12,21,22]. Results for rural/wilderness locations, as well as for urban/suburban settings, indicate that 9.9% and 14.1% of crash fatalities, respectively, are associated with prolonged response times [12]. According to Byrne et al. [12], such mortality rates have important implications for trauma system design and health policy [12]. Related results are also provided by Eftekhari et al. [23] which show that poor management of time is one of the six major challenges related to preventable deaths in RTIs. According to Ma, et al. [24], ERT, in addition to age, gender, seating position, and manner of collision, are all statistically significant in regard to the possibility of a fatality. These researchers further indicate that “the marginal smooth influential pattern of the ERT is non-monotonic” in regard to the relationship between longer ERT and the probability of a death. He et al. [25] employ spatial regression methods to demonstrate that establishing EMS performance measures is critical for the improvement of a rural community's access to Emergency Medical Services. According to these investigators, low service coverage measure means that improved strategic establishment or relocation of service stations are needed. The present investigation employs Geographically Weighted Regression (GWR) with two different kernel weighting functions: adaptive bi-square kernel and adaptive Gaussian kernel. Results from these functions are compared, for a wide range of experimental conditions, using ANOVA tables and analytic tools to determine the arrangement which gives the most physically realistic results. To provide a baseline reference comparison, resulting data are also considered relative to Global Regression Analysis (GRA) calculations. Crash records data for Pickens County Alabama for dates between January 2016 and December 2019 are used for this study. The impacts of the combination of six independent variables on the EMS Response Time (ERT) are modeled, including travel time, time of the day, day of the week, weather, lighting conditions, and crash severity. The present study is unique and different from previous studies because different kernel weighting functions are considered and employed with GWR, and because the present data are collected from a rural county in Alabama with only one EMS dispatch center.
2. Analytic Analysis Methods
2.1. Test Environment Data
- Crash records for Pickens County Alabama are obtained from the Critical Analysis Reporting Environment (CARE) database. Pickens County is a county located on the west central border of the U.S. state of Alabama. The medical center for the Pickens County is located at 241, Robert K Wilson Dr., Carrollton, AL 35447. There is only one Emergency Medical Services (EMS) dispatch location within the entire county. The longitude and latitude coordinates for the EMS dispatch center are used as the hospital location. For the dates between January 2016 and December 2019, the total number of crashes reported is 214.From the crash data, EMS response time (ERT), travel time, crash severity, day of the week, time of the day, lighting condition, and weather are considered as the variables for this study. Travel time is calculated between the Pickens County hospital location and each of the crash sites using Google Maps with travel time recorded in minutes for the fastest route. GWR4 software [26] is used to analyze the data using Global Regression Analysis (GRA), Geographically Weighted Regression (GWR) with an adaptive bi-square kernel weighting function, and Geographically Weighted Regression (GWR) with an adaptive Gaussian kernel weighting function. Figure 1 shows a map of Pickens County, with the hospital (EMS) location, and including four crash site locations.
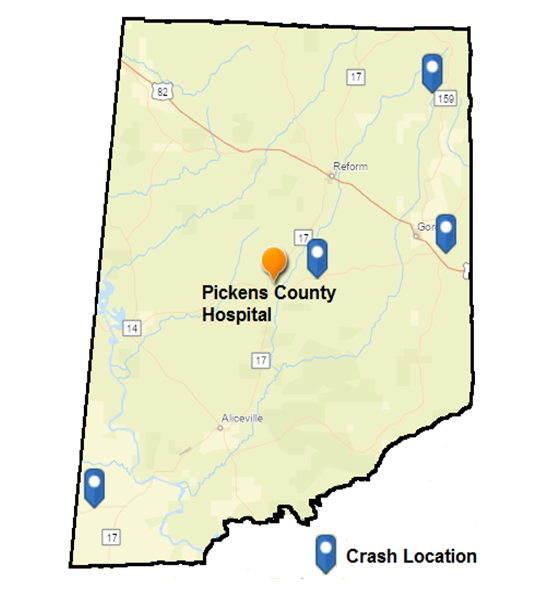 | Figure 1. Pickens County map with hospital (EMS) location and four examples of crash sites |
2.2. Regression Analysis Using Geographically Weighted Regression (GWR)
- Employed within the present investigation is GWR4 statistical software, which is specially developed for Geographically Weighted Regression (GWR) modeling [26]. Within this analytic code, a semi-parametric Gaussian GWR model is described using the equation given by
 | (1) |
 | (2) |
2.3. Weighting Functions for Geographically Weighted Regression (GWR)
- In GWR modeling, local parameters for each location are estimated based upon observations from nearby locations. Parameters associated with a location are more strongly affected by the observations occurring close by, relative to observations which are farther away. The influence factor to account for such variations in regard to location is the weighting function, wij. Observations are considered to be crash data for one particular location. The weighting function value for each crash data case indicates the influence of this case on the regression estimate of a different crash case. The weighting function value of cases closer to a particular crash location is then higher than the weighting function value of cases which are farther away. Two commonly used kernel weighting functions for this purpose are Gaussian and bi-square, as expressed using the following equations.Fixed Gaussian:
 | (3) |
 | (4) |
 | (5) |
 | (6) |
2.4. Regression Analysis Approach - Global Regression Analysis (GRA)
- In contrast to GWR, Global Regression Analysis or GRA does not account for geographical variability. For this approach, the model is given by the following equation
 | (7) |
3. Analytic Results
3.1. Results Using Geographically Weighted Regression (GWR) with Adaptive Gaussian Kernel Weighting Function
- Here, results are obtained using GWR with an adaptive Gaussian kernel weighing function, as expressed using Eqn. (6). With this arrangement, Gaussian kernel weight continuously and gradually decreases from the center of the kernel, but never reaches zero. Longitude and latitude of the crash site are used for location data. ERT is the dependent variable. Independent variables are day of the week, time of the day, weather, crash severity, lighting conditions, and travel time. Based on the geographical variability results, all the independent variables except travel time are local terms.Variance inflation factor (VIF) values are also determined for different combination of variables. The VIF value quantifies the severity of multi-collinearity within least squares regression analysis results. The present VIF values are calculated using R-Square values obtained using Analysis ToolPak within Microsoft Excel software. Resulting VIF values for multiple combinations of variables from the present study range between 1.0002 and 2.0943. Because these VIF values are close to one and very low compared to 5, the six independent variables are not strongly correlated with each other. Note that VIF values greater than 5 indicate that multi-collinearity between parameters (or variables) is high.
3.1.1. Travel Time - Global Independent Variable
- Table 1 shows GWR results for ERT as the dependent variable and travel time as only one independent variable. The effect of travel time on ERT is indicated by the coefficient estimate, which is positive indicating that ERT increases with an increase in the travel time. According to the coefficient value, the average ERT is 1.1% longer than actual travel time when no other independent variables are considered. The standard error (SE), which indicates the variation of estimate, is 0.257. The t-statistic value is for travel time is 3.939. This magnitude of t-statistic indicates that travel time has a significant impact on the EMS response time (ERT). The value of the intercept is not significant for the analysis, because variables are quantified using code numbers.

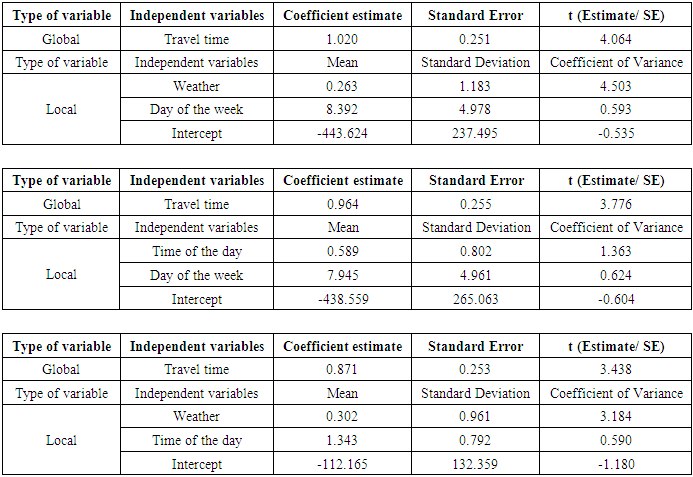
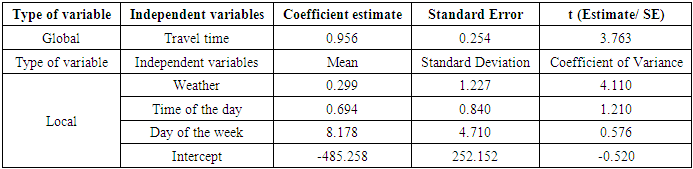
3.1.2. Travel Time - Global Independent Variable with Other Local Independent Variables
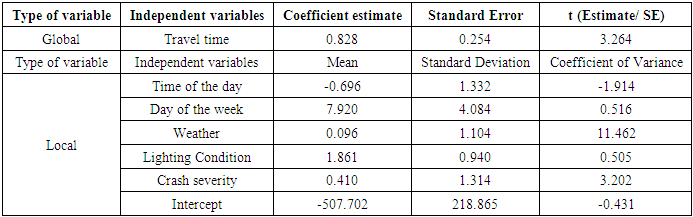
- Tables 2a-2c show GWR results for ERT as the dependent variable and travel time as one independent variable, with additional independent variables added to the analysis. According to these data, travel time always has a positive impact on the ERT, such that, as travel time increases, the ERT also increases. The coefficient of the variable travel time ranges between 0.828 and 1.020, as different independent variables are added to the analysis. The coefficients also indicate that ERT is shorter than travel time for most of the combinations of variables. Data from Tables 2a-2d also show that the impact of travel time on ERT variation is very small, as other variables are added to the analysis. Adding variables time of the day, lighting conditions, weather, and crash severity to the analysis reduces the coefficient estimate for travel time. In contrast, adding variable day of the week increases the coefficient estimate value.
|
|
|
3.2. Global Regression Analysis (GRA) Results
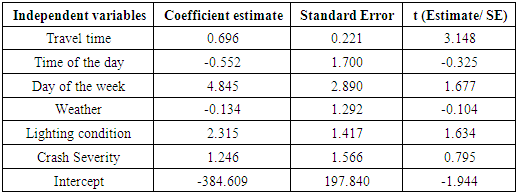
- Global Regression Analysis (GRA) does not account for variations due to spatial location, which means that associated model results are generally independent of location. Estimated coefficient values are thus spatially-averaged global values, and all independent variables are global. Within the present investigation, results obtained with this approach (without location influences) are used for comparison.Table 3 shows results for ERT as dependent variable with one independent variable. Table 4 shows results for ERT as dependent variable and travel time as one independent variable with five additional independent variables. For both sets of data, the coefficient of travel time is always lower than one. Results in Table 4 indicate that travel time, time of the day, and day of the week have a positive impact on ERT, which is qualitatively similar to GWR analysis results. Evidence is also provided by Table 4 data that weather has a negative impact on ERT. The t-estimate values for travel time, from Tables 3 and 4, are 3.425 and 3.148, respectively. In Table 4, t-statistic values for lighting condition and day of the week show that these two variables have a significant impact on ERT. Weather and time of the day have a lower t-statistic value which indicates minor impact on ERT. As mentioned, the magnitude of the t-statistic value indicates the importance of the independent variable, such that a value greater than 1 indicates that the independent variable has a significant impact on the dependent variable.
|

|
3.3. Comparisons of GRA Results, GWR Results with an Adaptive Gaussian Kernel Weighting Function, and GWR Results with an Adaptive Bi-Square Kernel Weighting Function
- Figures 2-7 show variations of the coefficient for each independent variable, as additional variables are added, for GRA, and GWR analyses with both kernel weighting functions. Note that the value of the coefficient is averaged, as different variable combinations are employed, when two and three variables are considered. Figure 2 shows that the coefficient for travel time varies only slightly as additional variables are added, for up to 3 variables. Somewhat larger variations are evident as the number of variables exceeds 3, for all three analysis approaches. For each variable number, GRA gives the lowest coefficients, whereas GWR with an adaptive bi-square kernel weighting function gives the highest coefficients. For all three analysis methods, Figure 3 shows that the coefficient for time of the day decreases in a progressive fashion, as additional variables are considered. Here, GRA coefficient values are consistently higher for all variable numbers, when compared to both GWR analysis methods. All three analysis methods give positive coefficients when up to four variables are employed, and negative values when a total of 6 variables are utilized.
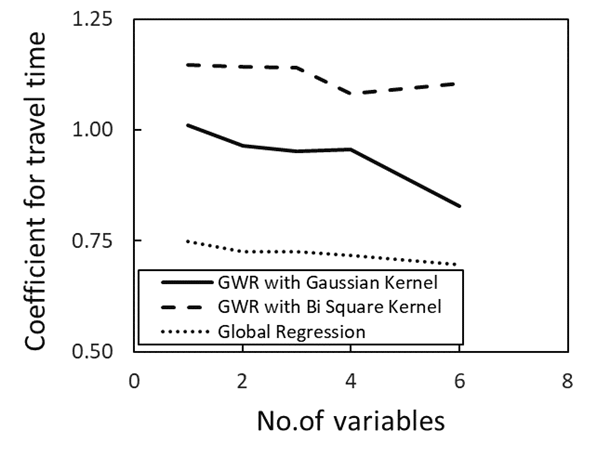 | Figure 2. Coefficient for travel time variation as additional variables are added, determined using GRA, GWR with Adaptive Gaussian Kernel Weight Function, and GWR with and Adaptive Bi-Square Kernel Weighting Function |
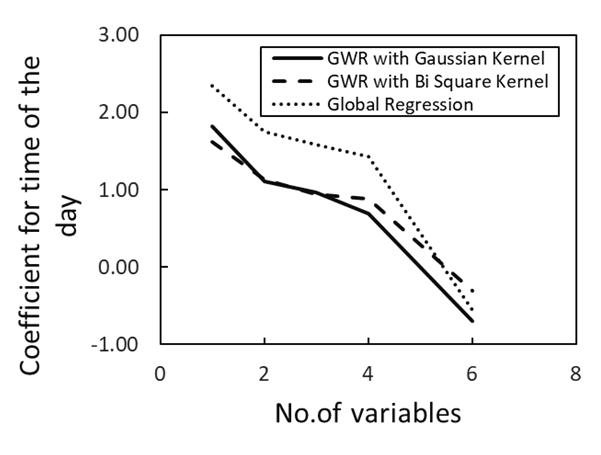 | Figure 3. Coefficient for time of the day variation as additional variables are added, determined using GRA, GWR with an Adaptive Gaussian Kernel Weighting Function, and GWR with an Adaptive Bi-Square Kernel Weighting Function |
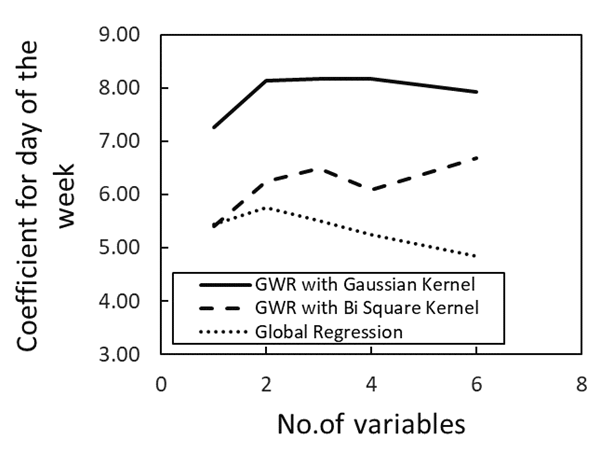 | Figure 4. Coefficient for day of the week variation as additional variables are added, determined using GRA, GWR with an Adaptive Gaussian Kernel Weighting Function, and GWR with an Adaptive Bi-Square Kernel Weighting Function |
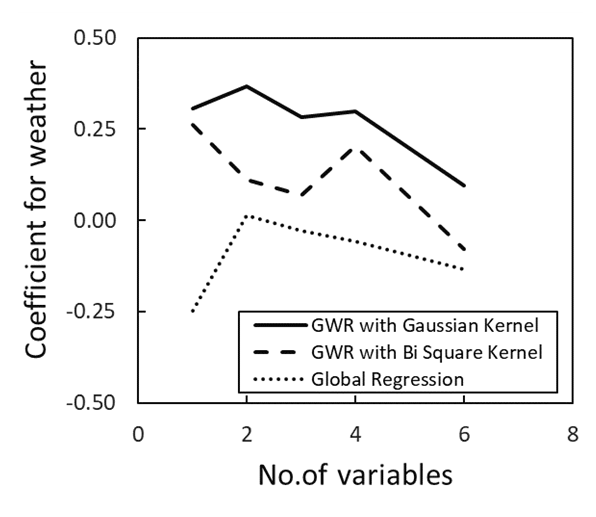 | Figure 5. Coefficient for weather variation as additional variables are added, determined using GRA, GWR with an Adaptive Gaussian Kernel Weighting Function, and GWR with an Adaptive Bi-Square Kernel Weighting Function |
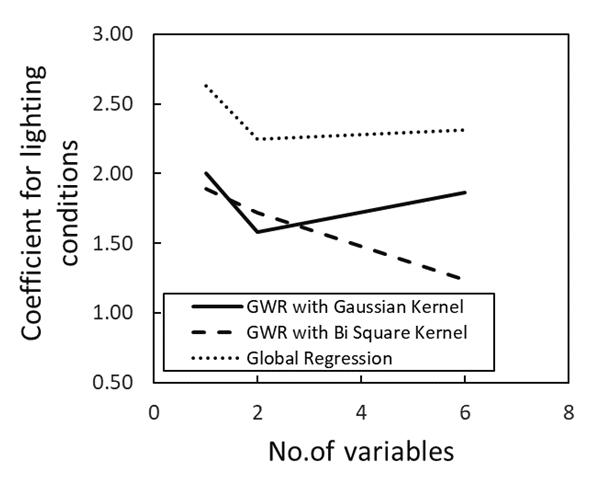 | Figure 6. Coefficient for lighting conditions variation as additional variables are added, determined using GRA, GWR with an Adaptive Gaussian Kernel Weighting Function, and GWR with an Adaptive Bi-Square Kernel Weighting Function |
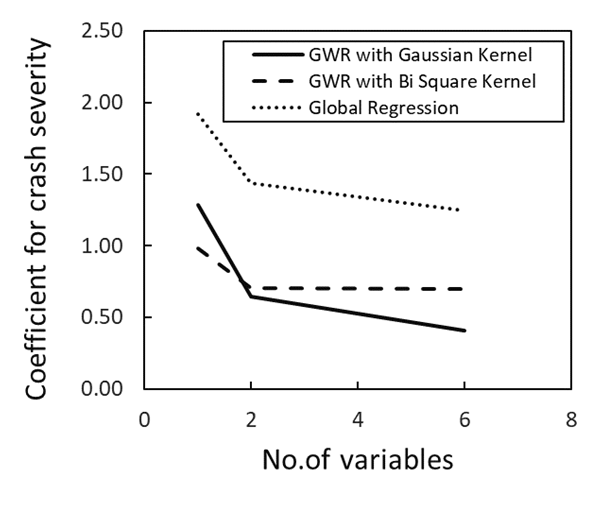 | Figure 7. Coefficient for crash severity variation as additional variables are added, determined using GRA, GWR with an Adaptive Gaussian Kernel Weighting Function, and GWR with an Adaptive Bi-Square Kernel Weighting Function |
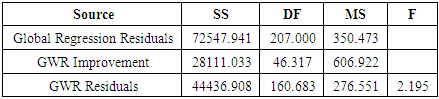
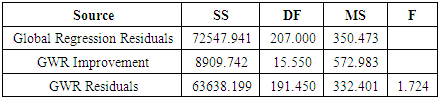
3.4. ANOVA Comparisons of GRA Results, GWR Results with an Adaptive Gaussian Kernel Weighting Function, and GWR Results with an Adaptive Bi-Square Kernel Weighting Function
- ANOVA, or analysis of variance, results are provided to compare the performance characteristics of GRA, GWR with an Adaptive Gaussian Kernel Weighting Function, and GWR with an Adaptive Bi-Square Kernel Weighting Function. As results from these different analysis methods are compared, ANOVA values indicate if adding geographical variability location data leads to significant improvements in model performance. With the ANOVA approach, determined are Source, Sum of Squares (SS), Degrees of Freedom (DF), Mean Square (MS), and F-statistic values. Values of SS are calculated for GRA and GWR residuals, and the difference between the GRA residual and the GWR residual is the GWR improvement. The MS value of GWR improvement, divided by the MS value of the GWR residual, is then the F-statistic. Table 5 shows the ANOVA Table for geographically weighted regression (GWR) analysis with bi-square kernel weighting function, with six independent variables. The table indicates that SS is lower for GWR than for GRA, with a GWR improvement of 28111. Such characteristics mean that the GWR model provides a better fit to data, with more physically representative results. The MS value of the GRA model is 350.473. The MS value of the GWR model with a bi-square kernel function is 276.551. The F-statistic within Table 5 is 2.195. Because the MS value is lower, improved performance of the GWR model (with a bi-square function) is again indicated, relative to the GRA model.
|
|
4. Summary and Conclusions
- EMS response time (ERT) variation for data for a rural county in west Alabama, Pickens County, is investigated for a total of 214 crash cases for the dates between January 2016 and December 2019. The choice of this test environment is unique because only one EMS dispatch center is located within the county. The present investigation is undertaken to demonstrate and compare the use of Geographically Weighted Regression (GWR) using two different kernel weighting functions: adaptive bi-square kernel and adaptive Gaussian kernel. These two weighting functions are considered to provide different analytic tools to account for geographical variability location data. To provide a baseline reference comparison, resulting data are also considered relative to Global Regression Analysis (GRA) calculations, which are obtained without the inclusion of geographical variability location analysis. Considered are different combinations of six independent variables. Based upon geographical variability results, day of the week, time of the day, weather, crash severity, and lighting conditions are local independent variables, and travel time is a global independent variable. Results from GWR analyses, using both weighting functions, show important quantitative and qualitative differences in regard to coefficient values as each independent variable is individually addressed, especially as the number of considered variables is altered, relative to the addressed variable. From GWR ANOVA table data, values of SS are lower for GWR, using both kernel weighting functions, compared to GRA, with substantial GWR improvement values. Such characteristics mean that both GWR models provide a better fit to data, with more physically representative results. ANOVA table F-statistic and MS value data indicate that GWR analysis, with an adaptive bi-square weighting function, often yields improved model performance, relative to GWR with an adaptive Gaussian kernel weighting function. ANOVA table F-statistic data also evidence improved model performance, with the inclusion of geographical variability location data. This conclusion is based upon the result that both GWR analysis tools provide a lower MS value, indicating better performance relative to the GRA tool. With the adaptive Gaussian kernel weighting function, all observations are considered, with weightings that tend towards zero as distance from the travel location increases. The adaptive bi-square approach gives observations with decreasing weight with distance, such that weight is zero beyond a certain distance h, called the bandwidth. Based on standard deviation data, the adaptive Gaussian kernel weighting function provides adequate representation of physical behavior for some experimental conditions. However, function values for observations beyond a certain distance are often inaccurate, resulting in unrepresentative coefficient values. Because of these issues, GWR with an adaptive bi-square kernel weighting function provides data which are physically more accurate for a wider range of experimental conditions. Overall, the GWR and GRA analysis results indicate that, as the travel time increases, the EMS response time also increases. When different local independent variables are considered, EMS response time is larger on weekends than on weekdays. The EMS response time is larger in the evening and at night, when compared to morning. When the weather is clear or cloudy, the EMS response time is shorter. But when the weather is extreme, with mist, fog, or rain, the EMS response time is longer. When roads are dark, the EMS response time is longer, and when daylight is present, the EMS response time is shorter. If the crash is fatal, the EMS response time is longer compared to situations when crash injuries are non-severe.
References
| [1] | World Health Organization. Global status report on road safety 2013: supporting a decade of action: World Health Organization; 2013. |
| [2] | World Health Organization. 10 facts on global road safety, 2015 https://www.who.int/features/factfiles/roadsafety/en/. |
| [3] | M. Peden, R. Scurfield, D. Sleet, D. Mohan, A. A. Hyder, and E. Jarawan, World report on road traffic injury prevention. World Health Organization Geneva, 2004. |
| [4] | A. Eftekhari, D. Khorasani-Zavareh, and K. Nasiriani, “The importance of designing a preventable deaths instrument for road traffic injuries in pre-hospital phase,” Health in Emergencies and Disasters Quarterly, vol. 3, no. 4, pp. 177-178, 2018. |
| [5] | S. Gopalakrishnan, “A public health perspective of road traffic accidents,” Journal of Family Medicine and Primary Care, vol. 1, no. 2, pp. 144-150, 2012. |
| [6] | H. K. Bakke, T. Steinvik, S. I. Eidissen, M. Gilbert, and T. Wisborg, “Bystander first aid in trauma–prevalence and quality: a prospective observational study,” Acta Anaesthesiologica Scandinavica, vol. 59, no. 9, pp. 1187-1193, 2015. |
| [7] | National Highway Traffic Safety Administration. FARS annual crash statistics, 2017. https://www.nhtsa.gov/research-data/fatalityanalysis-reporting-system-fars. |
| [8] | Insurance Institute for Highway Safety Highway Loss Data Institute, General statistics, 2015. https://www.iihs.org/iihs/topics/t/generalstatistics/fatalityfacts/state-by-state-overview. |
| [9] | National Academies of Sciences, Engineering, and Medicine. Medicine. A national trauma care system: integrating military and civilian trauma systems to achieve zero preventable deaths after injury. Washington, DC: The National Academies Press; 2016. |
| [10] | J. Brown, N. Sajankila, and J. A. Claridge, “Prehospital assessment of trauma,” Surgical Clinics of North America, vol. 97, no. 5, pp. 961-983, 2017. doi:10.1016/j.suc.2017.06.007. |
| [11] | A. Kumar, O. Abudayyeh, T. Fredericks, M. Kuk, M. Valente, and K. Butt. “Trend analyses of emergency medical services for motor vehicle crashes - Michigan case study,” Transportation Research Record: Journal of the Transportation Research Board, No. 2635, pp. 55–61, 2017. |
| [12] | J. P. Byrne, N. C. Mann, M. Dai, S. A. Mason, P. Karanicolas, S. Rizoli, and A. B. Nathens. “Association between emergency medical service response time and motor vehicle crash mortality in the United States,” JAMA Surgery, pp. E1-E8, February 2019. |
| [13] | W. M. Evanco, “The potential impact of rural mayday systems on vehicular crash fatalities,” Accident Analysis and Prevention, vol. 31, pp. 455–462, 1999. |
| [14] | T. E. Lambert, and P. B. Meyer, “Ex-urban sprawl as a factor in traffic fatalities and EMS response times in the southeastern United States,” Journal of Economic Issues, vol. 40, no. 4, pp. 941-953, 2006. |
| [15] | R. P. Gonzalez, G. R. Cummings, H. A. Phelan, M. S. Mulekar, and C. B. Rodning, “Does increased emergency medical services prehospital time affect patient mortality in rural motor vehicle crashes? A statewide analysis,” The American Journal of Surgery, vol. 197, pp. 30–34., 2009. |
| [16] | M. J. Trowbridge, M. J. Gurka, and R. E. O’Connor, “Urban sprawl and delayed ambulance arrival in the U.S.,” American Journal of Preventive Medicine, vol. 37, no. 5, pp. 0749-3797, 2009. |
| [17] | R. Griffin, and G. McGwin, “Emergency medical service providers’ experiences with traffic congestion,” The Journal of Emergency Medicine, vol. 44, no. 2, pp. 398–405, 2013. |
| [18] | H. Brodsky, “The call for help after an injury road accident,” Accident Analysis and Prevention, vol. 25, no. 2, pp. 123–130, 1993. https://doi.org/10.1016/0001-4575(93)90051-W. |
| [19] | M. R. Akella, C. Bang, R. Beutner, E. M. Delmelle, R. Batta, A. Blatt, P. A. Rogerson, and G. Wilson, “Evaluating the reliability of automated collision notification systems,” Crash Analysis and Prevention, vol. 35, no. 3, pp. 349–360, 2003. https://doi.org/10.1016/S0001-4575(02)00010-6. |
| [20] | D. E. Clark, and B. M. Cushing, “Predicted effect of automatic crash notification on traffic mortality,” Accident Analysis and Prevention, vol. 34, no. 4, pp. 507–513, 2002. https://doi.org/10.1016/S0001-4575(01)00048-3. |
| [21] | G. Ponte, G. A. Ryan, and R. W. G. Anderson, “An estimate of the effectiveness of an in-vehicle automatic collision notification system in reducing road crash fatalities in South Australia,” Traffic Injury Prevention, vol. 17, no. 3, pp. 258–263 2016. https://doi.org/10.1080/15389588.2015.1060556. |
| [22] | B. Schooley, B. Hilton, Y. Lee, R. McClintock, and T. Horan, CrashHelp: A GIS tool for managing emergency medical responses to motor vehicle crashes, Information Systems for Crisis Response and Management, New York, 2010. |
| [23] | A. Eftekhari, A. D. Tafti, K. Nasiriani, M. Hajimaghsoudi, H. Fallahzadeh, and D. Khorasani-Zavareh, “Management of preventable deaths due to road traffic injuries in prehospital phase; a qualitative study,” Archives of Academic Emergency Medicine, vol. 7, no. 1, pp. e3, 2019. |
| [24] | L. Ma, H. Zhang, X. Yan, J. Wang, Z. Song, and H. Xiong, “Smooth associations between the emergency medical services response time and the risk of death in road traffic crashes,” Journal of Transport and Health, vol. 12, pp. 379-391, 2019. |
| [25] | Z He, X. Qina, R. Renger, and E. Souvannasacd, “Using spatial regression methods to evaluate rural emergency medical services (EMS),” American Journal of Emergency Medicine, vol. 37, pp. 1633–1642, 2019. |
| [26] | T. Nakaya, GWR4 user manual. GWR 4 Development Team; 2014. |
| [27] | J. A. Yacim, and D. Boshoff, “A comparison of bandwidth and kernel function selection in geographically weighted regression for house valuation,” International Journal of Technology, vol. 10, no. 1, pp. 58-69, 2019. |