-
Paper Information
- Next Paper
- Previous Paper
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
Software Engineering
p-ISSN: 2162-934X e-ISSN: 2162-8408
2012; 2(3): 49-56
doi: 10.5923/j.se.20120203.02
Smart Powered Wheelchair Platform Design and control for People with Severe Disabilities
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-Text HTML
Full-Text HTMLYoucef Touati , Arab Ali-Cherif
Computer Science & Artificial Intelligence Lab. LIASD, University of Paris 8, Saint-Denis, 93526, France
Correspondence to: Youcef Touati , Computer Science & Artificial Intelligence Lab. LIASD, University of Paris 8, Saint-Denis, 93526, France.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
Development of new systems for disabled and elderly people’s assistance requires a multidisciplinary approach based on new technologies according to users’ needs. Intelligent wheelchairs can help this category of people to live more independently. The purpose of this paper is to propose and develop embedded control architecture for smart wheelchair monitoring, leading to gain mobility and independency. The control architecture uses virtual impedance principle and is based on some considerations concerning external force-feedback joystick abilities to translate variations of distances between the wheelchair and obstacles into a perceived effort. To test the effectiveness and evaluate performances of the proposed control architecture, some simulations and experimentations on a smart wheelchair called LIASD-WheelChair, are designed in this respect.
Keywords: Smart Wheelchairs, Virtual Impedance Control, Wireless Communication, HMI
Article Outline
1. Introduction
- Development of new systems for disabled and elderly people’s assistance requires a multidisciplinary approach based on new technologies according to the users’ needs. Researches in medical, paramedical and advanced technologies fields can collaborate directly to develop new strategies ranging from simple assistance to various access services such as websites, Smart phone and so on. As a kind of rehabilitation systems, intelligent wheelchairs can play an important role in helping the handicapped and the elderly people to live more independently and autonomously[1-2].One of the main trends in smart wheelchairs development is how to ensure a reliable remote tele-operation task with obstacle avoidance in a constrained environment taking into account system’s interactive behavior. Various methods have been investigated in this context such as edge detection[3], potential field[4] and impedance control[5]. In edge detection methods, the objective is to determine the vertical edges of the obstacle and consequently attempts to steer the mobile system around an edge. The main drawback is the proximity between the mobile system and the obstacles which is not suitable for the real time computation. Potential field methods allow a collision avoidance motion planning by generating a virtual force against obstacles and toward the goal. An attractive force between the mobile system and the target, and a repulsive force against obstacles are generated.As it’s mentioned in[1], all these methods have advantage of making the fast motion planning for nearby obstacles, but with a shortcoming of getting into a local minimum where the attractive and repulsive forces are equal.To overcome the local minimum, an extended virtual force field method is proposed, where a free vector is added to the repulsive force. This force becomes larger for the larger obstacles since repulsive forces are coming from all obstacle-detecting sensors, which makes this method unsuitable for certain applications. Impedance methods which are based on the concept of active control constitute a considerable contribution to deal with issues cited above. Both free and constrained motions can be handled by controlling the relation between input commands and robot-environment contact forces. In the same manner, impedance methods based on virtual aspects[6] are used to determine a repulsive force for mobile robot navigation avoiding obstacles. The principle is to generate a virtual force between mobile system and environment using exteroceptive localization tools such as US sensors, LIDAR and so on. In the most cases, these generated virtual forces are transferred and translated to a human operator through a joystick as tactile information. In this paper, we are interested by this kind of approach to monitor a smart wheelchair through a wireless communication network based 802.11 standards.The remainder of this paper is organized as follow: in section 2, we present some related works concerning smart wheelchairs research projects. Section 3 describes experimental setup overview called LIASD-WheelChair where hardware and software aspects are illustrated. In order to ensure a reliable remote tele-operation task in a constrained environment, in section 4, we’ve proposed a strategy for wheelchair monitoring and control based on virtual impedance concepts. Experimental and simulation results are outlined in section 5. Finally, a brief conclusion and perspectives are summarized in the last section.
2. Some Related Works
- Several research projects[7-10] using novel emerging technologies have been directed in the last decade to conceive and develop new hardware and software architectures to enhance the quality of service in terms of autonomy, mobility and accessibility. As an example, a TAO-2 project has been developed to increase the efficiency use of smart wheelchair[11] by establishing a methodology to design, implement, and test an effective add-on autonomy management system for use in conjunction with most common commercially available power wheelchairs. An adaptive, flexible and intelligent assistive technology has been proposed enabling users to participate fully in their daily lives[12-13]. An anti-collision and navigation systems aims to provide safe and intuitive means of mobility for people who have cognitive disabilities. In[14], intelligent assistance-system has been conceived to facilitate driving for severe disabled and elder people with heavy reduced physical and/or mental abilities. The idea is to make use of a cognitive model of the user to reduce considerably the amount of necessary user commands in order to enhance the dependability of the wheelchair control. A UT-Intelligent Wheelchair is a project that develops the notion of graceful motion for a robotic wheelchair motion[15]. TinMan[16] and Wheelesley[17] are two research projects that have been highlighted by designing control systems based on a graphical user interface that has successfully been integrated with an eye tracking system and single switch scanning as input methods. More recently, in[18], a Smart wheelchair uses a virtual interface displayed by an on-board projection system to implement a shared control framework that enables the user to interact with the wheelchair while it is performing an autonomous task. In[19], a modular smart wheelchair component system SWCS which can be added to a variety of commercial power wheelchairs has been elaborated. It is designed for all traditional input methods accommodations and for compatibility with multiple brands of wheelchairs. A smart wheelchair integrating intelligent controllers that helps people with physical disabilities overcome daily problems has been proposed in[20]. It’s equipped with onboard processing and multiple sensors. The system operates as a completely autonomous mobile robot platform. An intelligent control system allows giving more assistance to the users according to various sensors information such as cameras, laser range finder, and an onboard processing. In[21], a collaborative wheelchair assistant WCA is proposed for a full use of human skills by involving the user into the navigation control. The user gives the high-level commands and directly controls the speed, while the low-level control is taken over by the machine, which is tracking a software defined guide path. Based on some successful experiments results, path guidance brings safe motion and drastically simplifies the control. Hence, the wheelchair user adopts an optimal driving behavior from the first trial with a minimum of intervention. In the same manner, in[22], a research derived from the field of mobile robotics has been investigated to show how collaborative control techniques can be used to insure a best user-powered wheelchair interaction, predicting user intentions and responding to these predictions with adaptable levels of assistance. The same studies as in[23], illustrate how collaborative controls between user and wheelchair can be benefit. Another project allowing severely disabled people suffering from paraplegia and quadriplegia to steer an automated wheelchair is proposed[24]. It consists on a combination of a non-invasive EEG-based human-robot interface and an autonomous navigation system that safely executes issued commands. In[25], a smart and automated wheelchair is experimented in complex navigational situations. For a given task, a conventional joystick and a proportional head-joystick can be used to assist the operator in his manoeuvring. Altering the translational and rotational velocities in situations where an obstacle blocks the user-commanded way, the driving assistance module significantly improves driver-performance by preventing all collisions along the way.The work presented in this paper has the same perspectives as those concerning research projects mentioned above. It investigates one of the main trends in smart wheelchairs development area, which is about how to ensure a reliable remote tele-operation task with obstacle avoidance in free and constrained environments taking into account system’ interactive behavior. Thus, Impedance control method based on the concept of active control can be considered also as an important contribution to deal with issues cited above. It provides a unified approach to all aspects of manipulation. Both free motion and contact tasks can be controlled using a single control algorithm. This method implements an algorithm that controls the relation between a velocity command and the contact force, which models the interconnection between an uncertain environment and a robot as impedance. In virtual impedance method, impedance is used to determine a repulsive force for mobile robot navigation avoiding obstacles. As an example, the principle of this method is used in[26], where the objective is to generate a virtual force between a wheelchair and the environment, which, in addition to the visual information, is transferred to a human operator through a joystick as tactile information.In this paper, we are interested by this kind of control and particularly those concerning virtual impedance methods. For this purpose, we’ve proposed and developed embedded control architecture for smart wheelchair control and monitoring. The approach uses virtual impedance concept and is tested on experimental platform called LIASD-WheelChair. The implementation is based on some considerations concerning external force-feedback joystick abilities to translate variations of distances between a smart wheelchair and obstacles into a perceived effort. The approach exploits also information provided by Wireless Internet Camera Server, which is mounted on the wheelchair headrest, enabling the user to refine the odometry by computing the distance of objects from the wheelchair and then determine the safest routes to the desired location.In what follows, we present the experimental platform called LIASD-WheelChair, developed in our laboratory in collaboration with Engineering Research Center CRIIP of Orsay University.
3. Experimental Setup Overview
3.1. Embedded Architecture
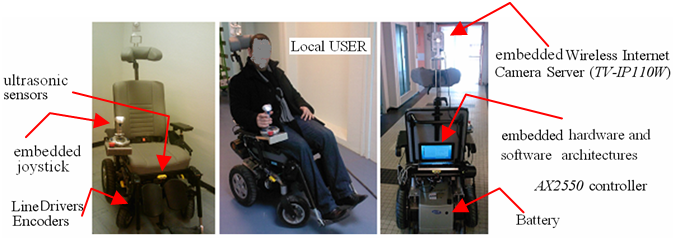
- LIASD-Wheelchair prototype is an adjustable adults’ powered wheelchair (Figure.1). It has the same mechanical structure as Storm3 and can be monitored according to two operating modes: local mode and remote mode via wireless communication network based on 802.11 standards. It is suitable for indoor or outdoor use, has a range of 30km, and has the capacity to climb 35% slopes and 15cm kerbs. The wheelchair includes some standard features: a non-powered seating platform, adjustable removable armrests with embedded joystick, adjustable swinging leg-rests and a head-rest incorporating an embedded camera. The wheelchair is fitted with four ultrasonic (US) sensors to identify obstacles from distance of 3cm to 6m, with 3 to 4cm of resolution. Our system includes two optical incremental encoders with resolution of 500 Counts per Revolution.
 | Figure 1. Smart wheelchair prototype |
 | Figure 2. Communication scheme |
 | Figure 3. Control architecture |
3.2. Communication Architecture
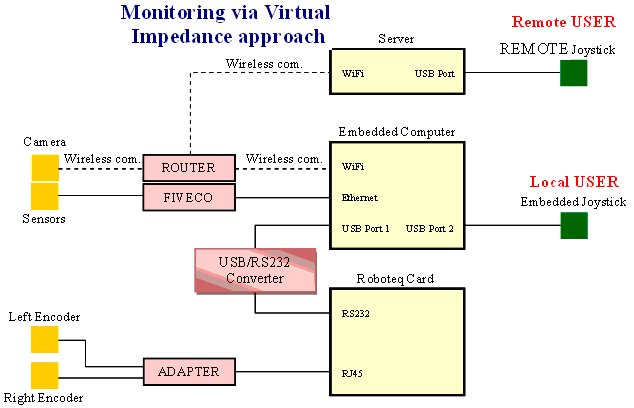
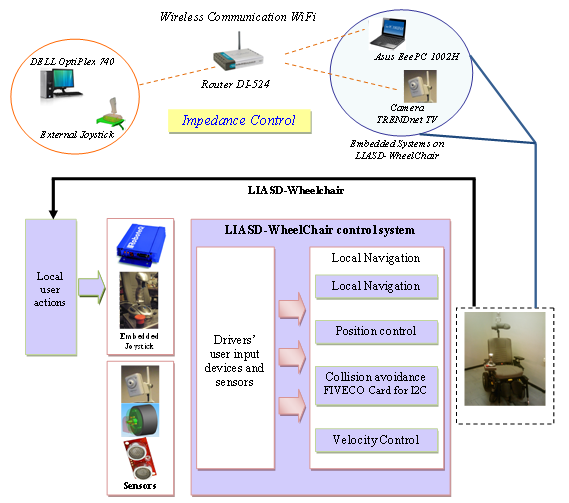
- Figure.4 illustrates the global communication and control architecture of the platform.An I2C protocol is used to manage US sensors module via a Fiveco card, and implement USB and RS232communication bus for embedded laptop (Asus-EeePC-10002H) and AX2550 controller interconnection. Via an adapter, incremental encoders are connected to Roboteq card trough RJ45 link.An embedded Asus-EeePC-1002H laptop use to control the whole architecture of the wheelchair, includes some features allowing a better information handling of different embedded modules (FiveCo, RoboTek, TRENDnet-TV camera,...) as well as those remotely located (server, routers ,...) via a wireless network.
 | Figure 4. Control and communication network scheme |
4. Virtual Impedance Approach
4.1. Proposed Approach Principles
- Since the works of Hogan in[27], impedance control approach is considered as one of the most frameworks to control the interactions between system and environment. This kind of approach ensures a smooth implementation of desired tasks by taking into account some real impedance parameters properties such as inertia, viscosity and stiffness, so that:
 | (1) |
 | (2) |
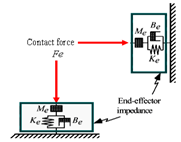 | Figure 5. Impedance interpretation |
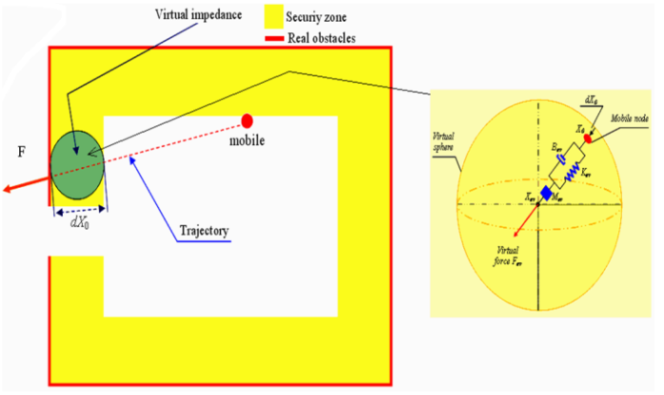 | Figure 6. Virtual impedance representation |
 | (3) |
 , represents the displacement vector of the mobile from position X0 to the center of the sphere Xev.The vector
, represents the displacement vector of the mobile from position X0 to the center of the sphere Xev.The vector  is given by:
is given by: | (4) |
 , virtual impedance can be highlighted by computing a virtual force-feedback
, virtual impedance can be highlighted by computing a virtual force-feedback  exerted on the center of that sphere as follows:
exerted on the center of that sphere as follows:  | . (5) |
4.2. Software Aspects
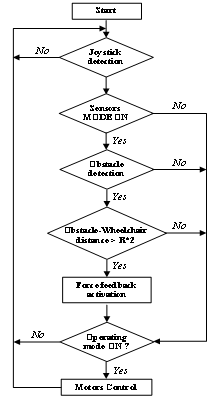 | Figure 7. Virtual impedance algorithm |
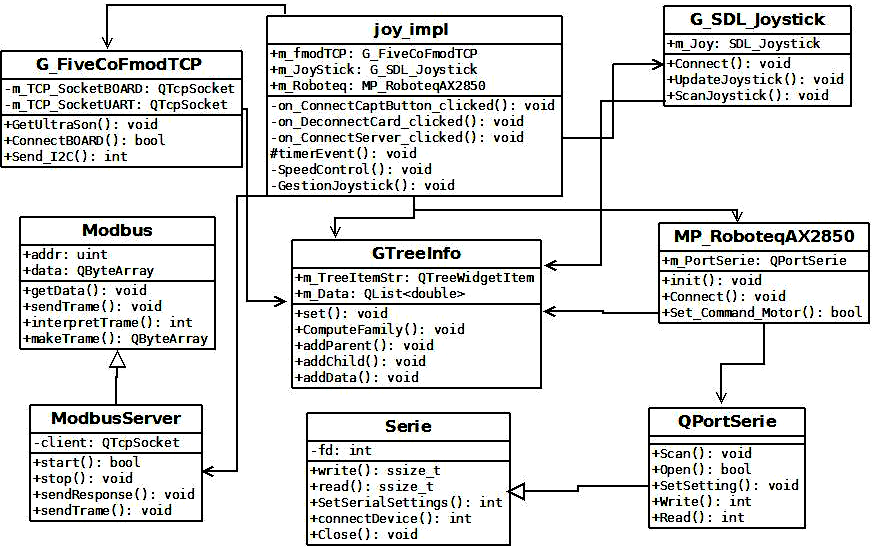 | Figure 8. Software architecture |
5. Simulation and Experimental Results
- The objective is to perform some tests in order to analyse the behavior of the LIASD-WheelChair interacting with environment. Thus, based on generated virtual forces that are transferred and translated through a joystick as tactile information, the human operator can perform a set of movements to maneuver the wheelchair. In this context, as a model of environment, we have proposed a circular configuration with a real behavior model of LIASD-WheelChair. One can note that different models of environment can be chosen such as square, ellipse, etc. First, virtual impedance parameters Kev, Bev and Mev are set arbitrarily and respectively to the following values 50[N/m], 10[Ns/m] and 2[kg]. Notice that the stiffness of the object is much higher that the positional stiffness of the impedance, so that the environment can be considered rigid. Moreover, for Sample-axis, each second corresponds to 100 Samples. Figure.9, illustrates the exerted efforts by the joystick in the environment (Environment 1). Indeed, from sample 250, we note an increasing of the perceived efforts on the joystick corresponding to the first contact between the wheelchair and the virtual sphere. At this time, the reached value is 1100 and oscillates around 1000 and 1250. After sample 2000, the perceived force decreases to a minimum value of 400. Despite this, the intensity remains very weak.
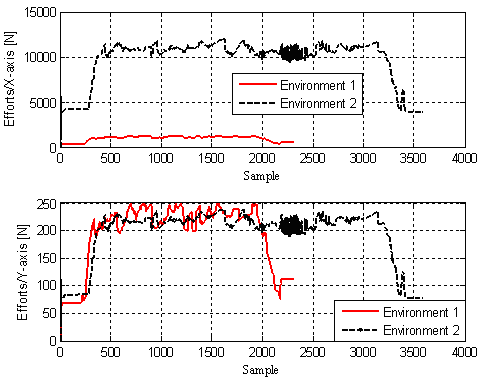 | Figure 9. Exerted efforts on the environment |
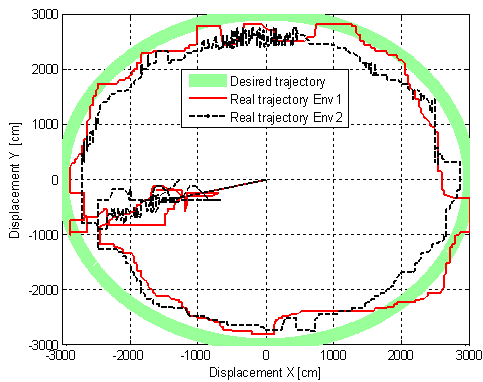 | Figure 10. Desired and real trajectories |
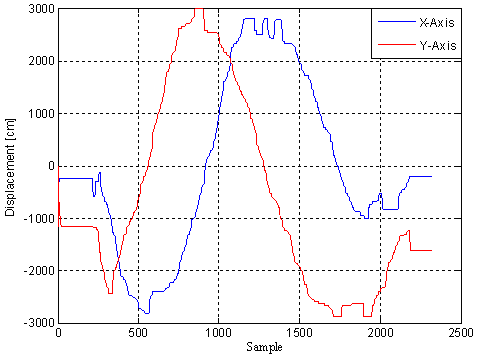 | Figure 11. Real trajectories for Kev = 50[N/m] |
 | Figure 12. Real trajectories for Kev = 250[N/m] |
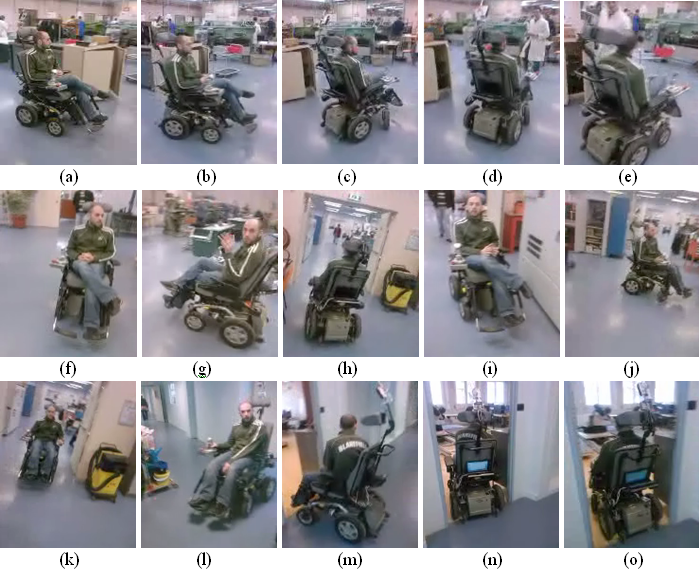 | Figure 13. LIASD-WheelChair moving in constrained environment |
6.Conclusions
- In this paper we have proposed an approach dedicated for improving handicapped people’s assistance and particularly those concerning smart wheelchairs. We have presented an approach based on virtual impedance method leading to control and to monitor LIASD-Wheelchair remotely through wireless communication network which is based on 802.11 standards. This kind of approach allows a reliable remote manoeuvring with obstacle avoidance in a constrained environment taking into account system’s interactive behavior. In order to test the effectiveness of the proposed approach, simulations and experimentations have been designed in this respect. Thus, according to the obtained results, some future researches and perspectives involving new techniques such as neural networks and fuzzy logic should be undertaken in order to increase performances in terms of accessibility and autonomy. These promising results lead us to further investigation into the use of this control approach for other kinds of tasksSome other research perspectives can be investigated in the same direction as projects mentioned above, contributing to propose new software and hardware architectures based on emerging technologies such as wireless sensor network, RFID and web-services in order to improve autonomy, mobility and accessibility of disabled people in their daily live.
ACKNOWLEDGEMENTS
- Authors would like to thank the Computer Science Department of Paris-8 University for its financial support and the Engineering Research Center CRIIP team of ENS Cachan for their availability and technical collaboration.