-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
International Journal of Plant Research
p-ISSN: 2163-2596 e-ISSN: 2163-260X
2018; 8(2): 34-39
doi:10.5923/j.plant.20180802.02

A Comparison of GVF and VFC on Leaf Images
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLDV Anudeep, Vijay Bhargav Eshappa, Bhagya M. Patil
Computer Science and Engineering Department, PES University, Bengaluru, India
Correspondence to: Bhagya M. Patil, Computer Science and Engineering Department, PES University, Bengaluru, India.
| Email: |  |
Copyright © 2018 The Author(s). Published by Scientific & Academic Publishing.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

Snakes or Active contours, are algorithms that are tremendously used to achieve image segmentation by edge detection. The drawbacks in the active contour model gave rise to new external forces such as Gradient Vector Flow (GVF) and Vector Field Convolution (VFC). In the past few decades, the GVF and the VFC active contour models have been in constant comparison regarding the speed and accuracy of object detection within the image domain. This paper develops a comparison between the two models on a few sample leaf images.
Keywords: Image Segmentation, Parametric Active Contours, Gradient Vector Flow, Vector Field Convolution, Edge Map
Cite this paper: DV Anudeep, Vijay Bhargav Eshappa, Bhagya M. Patil, A Comparison of GVF and VFC on Leaf Images, International Journal of Plant Research, Vol. 8 No. 2, 2018, pp. 34-39. doi: 10.5923/j.plant.20180802.02.
Article Outline
1. Introduction
- The broad term used to describe the various means of extracting useful information and analysing an image is known as image processing. Digital image processing [1] and analog image processing constitute the types of image processing. In this paper we practice Digital image processing. Digital Image Processing can be summarized as a set of actions of converting an image into a computable form and carry out operations on it to withdraw important data from the image. It is a rapidly growing technological field that makes practical use of the state of the art machine learning algorithms such as Classification, Pattern Recognition, Feature Extraction. Digital image processing allows the use of computer algorithms which support the implementation of complex methods and techniques that would be impossible by analog means.It is being widely used in fields such as machine/robot vision, medical field, pattern recognition, image sharpening, video processing.Image segmentation [2] is the first step in pre-processing of Image Analysis. It can be visualised as a process of splitting an image into manifold segments. It is commonly used in locating an object from an image or locating lines, curves or edges in images.Image segmentation [3] can be achieved by Thresholding, Clustering Methods, Histogram based Methods and Active contours or snake is the most commonly used Technique in Image segmentation. In the field of medical images active contours played a wide role [25, 27, 29].Previous work on research papers show the various object detection techniques [3, 4, 5] for image segmentation based on color, shape and Texture, by using techniques like color histogram, boundary structure model and edge focussing algorithms. Pre-processing Tools like color distance map and input strokes were used to improve the performance of Image segmentation.In our experiment we performed trials on cotton leaf images for segmentation to check if it converges better in the presence of the GVF force or the VFC force [28, 26]. We have also kept track of the time and iterations taken to converge in presence of these fields and further drawn conclusions.
2. Active Contour
- Snakes or Active Contours [6, 7, 21] can be generalized as curves described in an image domain that can shrink or grow due to the Internal and External Forces.Internal forces are defined within the curve itself, whereas the External forces arise from the image data. These forces ensure that the snake is confined to object boundaries or any other feature in the image.Active contour models [2, 17] are of two types Parametric Active Contours and Geometric Active Contours.
2.1. Parametric Active Contour
- Parametric active contours [8] synthesize parametric curves within the domain of an image and aid them to move towards edges of the object within the image domain.The energy function of an active contour within the spatial domain of an image involves two forces as its components, namely, external forces and internal forces.The external forces comprise potential forces and other forces such as pressure forces [9]. Potential forces [10] are calculated as the negative gradient of a potential function. Internal forces are the forces responsible for holding the curve together and preventing the curve from bending too much.
2.2. Geometric Active Contour
- The field of medical image computation has made significant use of Geometric Active Contours. Geometric active contours [11, 16, 24] also known as Geodesic active contours perform the actions of breaking the contour and merging them on the basis of occurrences of objects in the given image. Geometric active contours majorly work with functions of the image’s arc length, or the derivatives obtained with respect to these functions.In our experiments we have adopted to Parametric Active Contour as the convergence speed was much faster compared to Geometric Active Contour.
3. Parametric Snake Model
- A snake [8] is a curve x(s) = [x(s),y(s)], where s belongs to the range [0,1]. For a snake model its energy functional can be given as
 | (1) |
 | (2) |
4. Gradient Vector Flow
- There are two major challenges [8] with the Active Contour. First the initial snake must be really close to the edge to be detected and snakes have difficulty to converge in the concave regions.To overcome these challenges a new external force was introduced, whose fields are called GVF fields and the snake that uses the GVF field is called GVF snake [12, 20, 22]. This GVF field pulls the snake towards the object boundary when the snake is closer to the boundary and can converge the snake into concave regions.Energy minimization function for GVF can be stated as
 | (3) |
 | (4) |
 | (5) |
 | (6) |
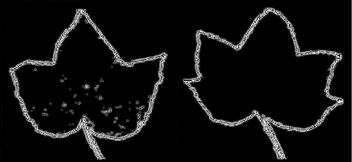
 in the above two equations is called as Laplacian operator [23]. The second term in the above two equations reduces to zero as the gradient of f(x,y) reaches zero, where f(x,y) is the edge map of the image. The GVF field is obtained from the above two equations with V(x,y) as an External force.In Figure 1a and Figure 1b we can see the sample leaf image and the converged GVF snake, where the enclosing line represents the GVF snake converging the leaf image.
in the above two equations is called as Laplacian operator [23]. The second term in the above two equations reduces to zero as the gradient of f(x,y) reaches zero, where f(x,y) is the edge map of the image. The GVF field is obtained from the above two equations with V(x,y) as an External force.In Figure 1a and Figure 1b we can see the sample leaf image and the converged GVF snake, where the enclosing line represents the GVF snake converging the leaf image. | Figure 1a. This figure shows a sample image and a converged GVF snake |
 | Figure 1b. This figure shows a sample image and a converged GVF snake |
5. Vector Field Convolution
- One of the important drawbacks [14] of the GVF snake model was the high computational cost. This problem was largely solved with the VFC snake model. The Vector Field Convolution (VFC) snake model is obtained by replacing the standard external force in the active contour model by the VFC external force [15].We can calculate the VFC force v(x,y) = [u(x,y), v(x,y)] for an image I(x,y) with the help of the vector field kernel k(x,y) and edge map f(x,y) for the image.
 Here, the vector field kernel k(x,y) is given by
Here, the vector field kernel k(x,y) is given by Where m(x,y) is the magnitude of the vector at (x,y) and n(x,y) is the unit vector pointing to the origin
Where m(x,y) is the magnitude of the vector at (x,y) and n(x,y) is the unit vector pointing to the origin Where
Where  is the distance from the origin, except that n(0,0) = [0,0] at the origin.The images we used in our research were leaf images (with and without noise) and we used a two dimensional vector field.The magnitude of the vector field kernel is a huge factor deciding the strength of VFC field. The radius of the vector field kernel must be chosen with concern. We chose the gamma value to be 1.8 in these experiments while determining the magnitude of the vector field kernel. There are two types of magnitude functions [14].
is the distance from the origin, except that n(0,0) = [0,0] at the origin.The images we used in our research were leaf images (with and without noise) and we used a two dimensional vector field.The magnitude of the vector field kernel is a huge factor deciding the strength of VFC field. The radius of the vector field kernel must be chosen with concern. We chose the gamma value to be 1.8 in these experiments while determining the magnitude of the vector field kernel. There are two types of magnitude functions [14].  | (7) |
 | (8) |
 | Figure 2a. This figure shows a sample image and a converged VFC snake |
 | Figure 2b. This figure shows a sample image and a converged VFC snake |
6. Results and Comparison
6.1. Edge Map
- An edge map of an image can be defined as an image that describes and specifies the edges of the image. An edge map of an image can be considered as the result obtained by applying an edge detection filter on the image. The strength and solidity of the edges would depend on the values calculated by the edge detection filter.Edge Detection is considered as the basic step in image segmentation. The process of edge detection involves a series of methods aimed at spotting points on the image where there is a sudden change in the image brightness (discontinuities). An edge in an image can be defined as a boundary where there is considerable change in physical features such as illumination and visibility.Some of the popular edge detection techniques include Sobel edge Detection, Canny edge detection, Laplacian of Gaussion (LoG) edge detection [19].
6.2. Sobel Edge Detection
- The Sobel operator is a popular edge detection technique which is based on entwining the given image with minimal, numerical filter in the horizontal and vertical directions and is hence computationally cheaper. The Sobel operator uses two 3X3 kernels which entwine over the initial image to compute approximations of the derivatives for both the vertical and horizontal changes.
 | Figure 3. Finding Edge map using Sobel Edge Map Technique |
6.3. Canny Edge Detection
- Canny edge detection is a technique involves multiple stages. These include removing or reducing noise from the image, applying the Sobel operator on the smoothed image in both the directions. The following stages involves removing unwanted pixels and non-edges by examining if there values qualify a threshold value.
 | Figure 4. Finding Edge map using Canny Edge Map Technique |
6.4. LoG Edge Detection
- The Laplacian of Gaussian (LoG) edge detection technique is quite similar to the Canny edge detection technique which includes similar stages such as noise reduction. Here, a second derivative of the smoothed image is used to detect if a zero valued pixel or edge occurs. The zero valued point indicates the presence of an edge.
 | Figure 5. Finding Edge map using LoG Edge Map Technique |
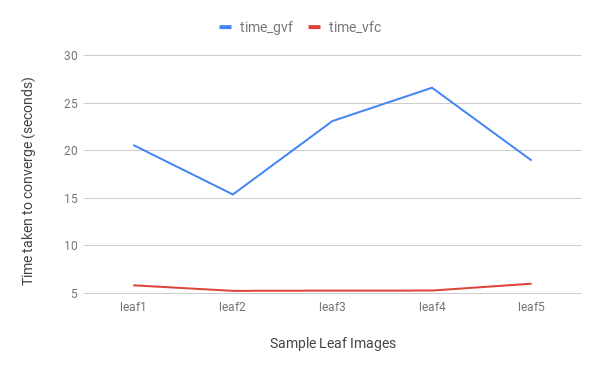 | Figure 6. A graph representing the time taken by the GVF and VFC models to converge around the leaf images |
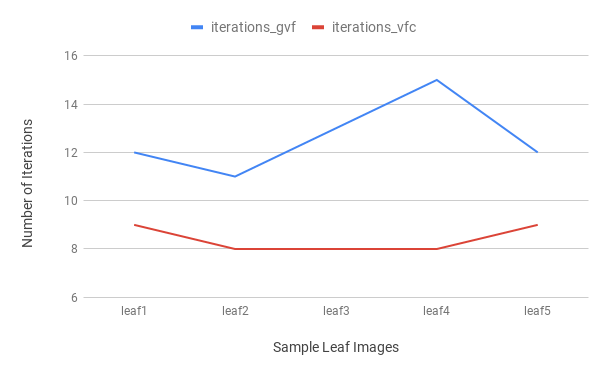 | Figure 7. A graph represents number of iterations taken by the GVF and VFC models to converge around the leaf images |
|
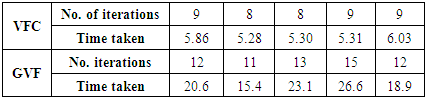
7. Computational Cost
- The images that we used were of dimensions 256 X 256. Our experiments were carried out in a Dell Inspiron System. The system ran on an i5 processor, with 16 GB RAM and 2.00 GHZ CPU. The software tool used for the above experiments was MATLAB. It can be said that the number of iterations is the most important factor deciding the computational cost of a snake model. From our work it can be seen that the number of iterations is higher and hence the computational cost of the GVF model is higher than the VFC model.
8. Conclusions
- After Immense analysis and research on convergence of active contour on leaf images in the presence of GVF and VFC, we have come to a conclusion that the snake converges faster in terms of number of iterations and the CPU time in presence of VFC. Also the computational cost for GVF is higher than VFC, due to the increased number of iterations and time.