-
Paper Information
- Next Paper
- Previous Paper
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
International Journal of Mechanics and Applications
p-ISSN: 2165-9281 e-ISSN: 2165-9303
2012; 2(6): 140-142
doi: 10.5923/j.mechanics.20120206.06
Introduction to a Simple Co-ordinate (x,y) System to Solve Problems of “Virtual Work”
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-Text HTML
Full-Text HTMLDilip Kumar Adhwarjee
Mechanical Engineering department, Dr. B.C.Roy Engineering College, Durgapur , 713206, India
Correspondence to: Dilip Kumar Adhwarjee , Mechanical Engineering department, Dr. B.C.Roy Engineering College, Durgapur , 713206, India.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
The objective of this article is to introduce a simple coordinate system to solve the problem of virtual work for rigid bodies.The principle of virtual work states,” if a particle is in equilibrium, the total virtual work of the forces acting on the particle is zero for any virtual displacement of the particle”.
Keywords: Virtual, Coordinate, Derivative, Equilibrium, System
Cite this paper: Dilip Kumar Adhwarjee , "Introduction to a Simple Co-ordinate (x,y) System to Solve Problems of “Virtual Work”", International Journal of Mechanics and Applications, Vol. 2 No. 6, 2012, pp. 140-142. doi: 10.5923/j.mechanics.20120206.06.
Article Outline
1. Introduction
- The author gives some procedure using co-ordinate system to solve every problem of virtual work. During my experience in teaching to students I come across that the students find difficulties to choose proper sign of the displacement and force. This simple procedure will eliminate these difficulties
2. Methods
- Take proper coordinates of the points where the active forces act.In the co-ordinate(x,y) ,take proper sign of the active forces, e.g. the force P is here negative. And the displacement yA = -a sinθ is also negative (θ is here acute angle) Take derivative of yA and multiply it by –P(acting at A) which will yield virtual work (-P(+dyA)). Assume dyA as positive. Do not take –dyA and multiply it by –P.Multiply +dxB, +dyA with the proper sign of associated forces and equate the sum(the total virtual work) to zero.If any force acts making an angle with the chosen coordinate(x,y), then resolve the forces in the x and y directions.
2.1. Examples 1
- In fig 1 the bar AB can rotate about Z axis. Find out the value of Q for which the bar will remain in equilibrium. Take length OA = a, OB = b Solution : yA = -a sinθ,or, dyA = -a cosθ d θor,
 | (1) |
 | (2) |
 Ans. (angle BOX = θ)
Ans. (angle BOX = θ)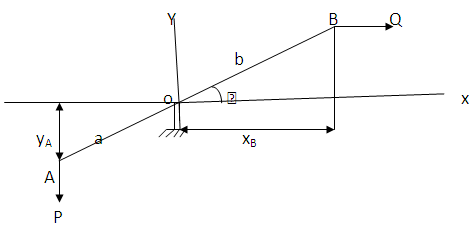 | Figure 1. The bar AB can rotate about Z axis |
2.2. Example 2
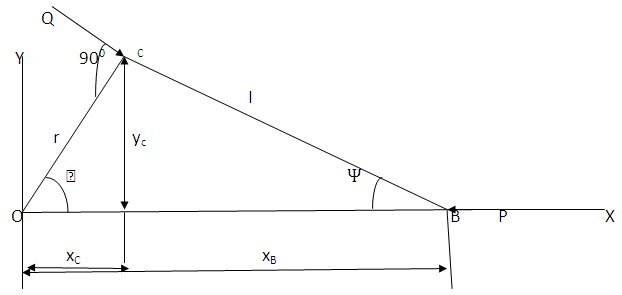
- The slider crank mechanism shown in fig 2 has l = 2r and θ = 600 . Find out the ratio Q/P for the system to be in equilibrium.
 | Figure 2. Slider crank mechanism |
 Thus virtual work done by the force –P acting at B is
Thus virtual work done by the force –P acting at B is  | (1) |
 Work done by force Q sinθ =Q sinθ (+dxC )=-Qr Sin2 θ dθyC = r sinθdyC =
Work done by force Q sinθ =Q sinθ (+dxC )=-Qr Sin2 θ dθyC = r sinθdyC =  Work done by force – Q cosθ = (– Q cosθ dyc = -Qr Cos2 θ dθThus total work done by force Q at C is =
Work done by force – Q cosθ = (– Q cosθ dyc = -Qr Cos2 θ dθThus total work done by force Q at C is =  | (2) |
 For θ = 600 and l = 2r we get Q = 1.1062 P Ans.(angle cox = θ)
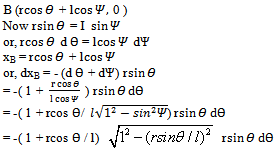
For θ = 600 and l = 2r we get Q = 1.1062 P Ans.(angle cox = θ)2.3. Example 3
 | Figure 3. Bar BP in equilibrium |
 Thus work done by force Q = -Q dyC =
Thus work done by force Q = -Q dyC =  So total work done = dU = P l sinθdθ-Q
So total work done = dU = P l sinθdθ-Q  ,Or, P =
,Or, P =  Ans. (angle BPO = θ)
Ans. (angle BPO = θ)2.4. Example 4
- We have to prove that for equilibrium the force Q is half of the force P.
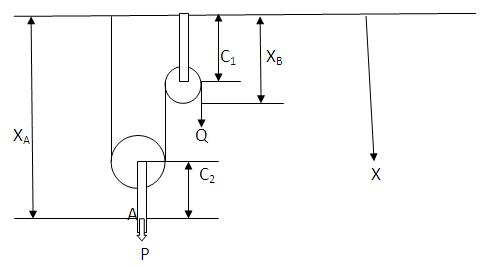 | Figure 4. Pulley system under equilibrium |
2.5. Example 5
- To find the relation between W1 and W2 for the equilibrium of the system
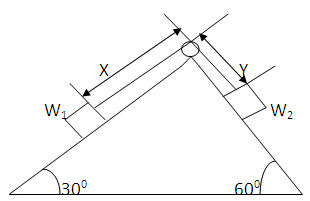 | Figure 5. Two weights under equilibrium |
 W2 Ans.
W2 Ans.3. Results
- The results of the methods referred here in this article are evident. Author has given five examples and the answers are achieved which are correct by using this method.
4. Discussion
- The author has validated the methods taking five examples. The readers are requested to use this easy method in other problems of virtual work .And feel free to contact the author at dilip.adhwarjee@bcrec.org
5. Conclusions
- According to the author the method can be applied to all problems involving virtual work.