-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
Journal of Wireless Networking and Communications
p-ISSN: 2167-7328 e-ISSN: 2167-7336
2016; 6(2): 29-39
doi:10.5923/j.jwnc.20160602.01

A Cognitive Global Clock Synchronization Method in Wireless Sensor Networks
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLBilal Ahmad, Ma Shiwei, Lin Lin, Song Yang
School of Mechatronics Engineering and Automation, Shanghai Key Laboratory of Power Station Automation Technology, Shanghai University, Shanghai
Correspondence to: Song Yang, School of Mechatronics Engineering and Automation, Shanghai Key Laboratory of Power Station Automation Technology, Shanghai University, Shanghai.
| Email: |  |
Copyright © 2016 Scientific & Academic Publishing. All Rights Reserved.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

Clock synchronization in sensor networks quite recently attained great importance and researchers are concentrating their attention on it. It is utmost difficult to get clock synchronization through clock skew and phase offset. Every sensor node has its own internal clock and it is very necessary to get all the clocks of sensor nodes precisely on common time value to achieve good synchronization. In surveillance and law enforcement applications global synchronization is important as precise mapping is required for the collected sensor data. The sensor nodes form a multi-hop and ad-hoc network for such applications. The basic demand for these applications is high accuracy and reduced latency error. The main contribution of this article is: 1. Brief introduction of fault tolerant novelty of the cognitive global clock synchronization algorithm (CGCSA) and 2. In this article we have observed jointly maximum likelihood estimation (JMLE) of the clock skew and clock offset in CGCSA to check its performance in terms of synchronization accuracy and compared our scheme with receiver only synchronization (ROS) strategy.
Keywords: Sensor networks, Clock Synchronization, Clock offset, Clock Skew, Algorithm
Cite this paper: Bilal Ahmad, Ma Shiwei, Lin Lin, Song Yang, A Cognitive Global Clock Synchronization Method in Wireless Sensor Networks, Journal of Wireless Networking and Communications, Vol. 6 No. 2, 2016, pp. 29-39. doi: 10.5923/j.jwnc.20160602.01.
Article Outline
1. Introduction
- Wireless sensor networks are such a scientific tool by which we can understand the elements of the real world even from far off places. Initially it was required by armed forces but later they are used by civil applications because of their diverse nature. It is such a vast and diverse field that it is impossible for a single discipline to cover the whole field. Application experts, software engineers and control engineers altogether sum this field up completely. The application of wireless sensor networks (WSNs) is very rapidly expanding to our daily life in recent years. Since the basic operation of WSNs is data fusion, time synchronization is required for basic communication among nodes in WSNs. To fulfill this need all the nodes are brought to agree on a common clock. It does not necessarily mean that all the nodes act at once since this would become a very strict form of synchronization. Any node at any time can match its relative time with another node. Energy efficiency, robustness, cost effectiveness; life time and accuracy are all prerequisites of time synchronization. We propose that cognition is also a factor which should be required for time synchronization. It is not an easy task to get maximum benefits from sensor nodes because of certain factors like limited energy and smaller hardware structure. The timing information of sensors is mismatched because of the drifting of internal clocks of the sensors. As a result of this situation achieving of accurate information becomes difficult and thus useful transmission cannot be had. Good time synchronization is required to achieve maximum benefits.WSNs cannot function over a long period of time because of energy deficiency and environmental factors. Moreover, during synchronization and messages exchange between two sensor nodes some quantity of energy is also consumed. As the sensor nodes remain unattended for quite some time and their batteries cannot be changed. In order to increase the life of a sensor network, it is mandatory to reduce its energy consumption or to develop fault tolerant, simple and accurate time synchronization protocols so that to make network functional in case of node failure due to less energy at the end sensor node. Overhearing is the type of synchronization which helps to decrease the dissipation of energy but at the same time it compromise on accuracy. Receiver only synchronization scheme is described in section two. Accurate and cognitive protocols are required to solve this issue. WSNs should remain functional even in the presence of faults, only then we can get benefits from them. We call this state fault tolerance. And if the protocol removes the faults by itself and adjusts the network we call it cognition. Cognition, in a way, is self-healing process. In the present day time there does not exist any technique which can overcome all types of faults. We need accurate and low complexity protocols to preserve network functionality over a longer period of time.Since the basic purpose of the WSNs operation is data fusion, therefore to fulfill this need all the nodes are brought to agree on a common time because this is the basic requirement of the any application of WSNs. Moreover, to agree local clocks of all sensor nodes exactly on a common time is a strict form of clock synchronization which is almost impossible to achieve. Due to the environmental factors and age of the local oscillator, local clocks of the sensor nodes may slightly drift from each other that’s why they are measured as parts per million. So the rate of oscillations of two sensor nodes cannot be exactly same. Similarly due to fixed and random communication delays nodes confront difference of time also. So most often the local clocks are precisely matched. In this article we presented precise clock synchronization taking in account that local frequencies of sensor nodes are slightly different from each other and value of computed offset shared between the nodes also suffers little delay. Cognitive global clock synchronization algorithm (CGCSA) adopts centralized synchronization mechanism. Because it is easy to control centralized synchronization schemes to achieve maximum benefits but the major drawback in centralized approaches is the failure of the master node. If we have a global time synchronization agreement between the sensor nodes which can handle faults also it provides us accurate and long term clock synchronization. As self-organization is a fundamental characteristic of the WSNs so we can direct this basic characteristic of WSNs for the cognition/fault tolerance. The rest of the paper is organized as: Some important factors directly related to the clock synchronization and the CGCSA are discussed in section 2, previous related research work is represented in section 3, section 4 describes the description of the cognitive global clock synchronization (CGCS), measurement model of the CGCS is discussed in section 5, section 6 discusses simulation results, and finally research work is concluded in the section 7.
2. Plenaries of WSNs and Clock Synchronization Related with CGCSA
- WSNs fall in the category of distributed systems as many processors working together fulfill a certain application in the network communication. But WSNs are a little different from other distributed system because their communication range is comparatively shorter and their hardware structure is smaller. As WSNs are different from other distributed system with reference to their hard ware infrastructure and application, so they are faced by different problems from those of the distributed systems. In this section we will discuss those constraints which are a challenge in designing of the protocols in WSNs. If these challenges are handled and addressed properly, we can get a great help in increasing the performance efficiency not only in the existing protocols but also in new protocol designing.
2.1. Constraints in WSNs
- Batteries are the energy source for the WSNs. If the battery of a node is discharged completely then this node does not remain functional. When nodes are operational a considerable amount of energy is consumed in data processing and communication. In the applications where energy efficiency is primary goal and accuracy can be compromised to some extent, they need resource efficient and energy efficient protocols. When one or more than one nodes stop working in a network this creates a bottleneck in fetching the data. To overcome this difficulty we need to design fault tolerant/cognitive protocols. When sensor nodes are temporarily influenced by certain elements the communication is affected to some extent. There are some elements which completely disturb the functioning of sensor networks, these elements are temperature, humidity and chemicals. Actually these constraints affect the quality of the communication link. To solve this problem we need robust protocols.Network density is also an important factor, effective coverage range can be short but area of coverage can be vast for which there is dense deployment of sensors and when the deployment is dense, it causes delaying factor because of multipath. Therefore effective routing protocols are required to solve this problem. Routing has two popular types (i) active routing and, (ii) proactive routing.
2.2. Coverage and Connectivity
- Numbers of nodes in WSNs depend upon two factors: cost of WSNs and functionality. Coverage and connectivity are also important justifications of WSNs. Both of these come into existence because of limited communication. The deployment of sensors in different applications is of different nature. The most recent research has created the common impression that triangular form of deployment covers more geographical area than rectangular form of deployment of sensor nodes. It is because overlapping area is smaller in rectangular lattice and it needs fewer sensors. “Coverage” is such a quality of service which tells us for how long a period and in how much better way can the sensor networks be functional in the sensing field. When sensor nodes have covered any physical field then it is required to transform the sensed data into useful information by fusing that data, and to achieve it clock synchronization in sensor nodes is a necessary factor. When this data is transmitted to the sink node it is called “connectivity”. To achieve useful and better coverage sensors are neither deployed much densely nor too far at long distances. The deployment of sensors can be random as well as fixed.
2.3. Network Topology
- Beside with the coverage and connectivity in the sensor network, special attention is given to the network topology also. Network topology may be star, tree, single hop or multi hop. Coverage may be sparse, dense or redundant. Connectivity may be connected or sporadic. Topology control is an extremely important issue without it nodes cannot function in any way for a longer period of time. It is quite difficult to better the performance of network without affecting its capacity and connectivity. If hop by hop short range method is applied instead of long range communication method, the possibility of the packet data loss is reduced to a considerable extent. For synchronization in mobile sensors dynamic network topology is used to make clock synchronization more robust, while in stationary sensors they are tightly coupled according to the desired application.
2.4. Clock Synchronization
- Clock synchronization is an operation in which it is ensured that all physical distributed processors are functioning at a common notion of time. This function is useful for security and fault tolerance. The data of all nodes is collected in order to arrange a meaningful result. That is why clocks are synchronized at a common time. There are several types of clock synchronization; however we will discuss only those schemes which are used in or directly related with our cognitive global clock synchronization scheme. Master-slave synchronization: In this type there is a master node which is equipped with CPU processor and all the children nodes have to set their local clocks at the local time of the master node.Peer-peer synchronization: In this scheme every node can communication independently with any other node. In this type the possibility of the failure of master node is lessened but to control this scheme is considerably difficult. Self-organization is a basic quality of sensor networks. Through this quality it is easy to control master-slave technique and getting maximum benefits. Therefore considering these factors we have overcome the biggest danger of failure of master node resulting the communication being affected, we overcome this problem by putting cognition (inclusion of expected master node) in it.Sender-receiver synchronization (S-R): One node sends the time stamp to another node and the other node records it sends back the acknowledgement to the first node and the message delay time is measured by calculating round trip time. Communication between master node and expected master node in CGCSA is followed by this strategy. Traditional S-R synchronization strategy adopted by [5] is shown in Figure 1.
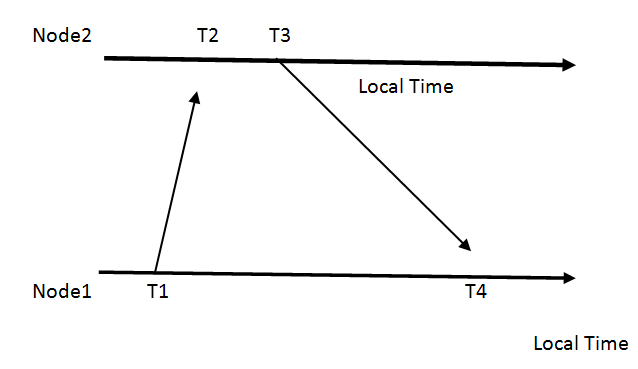 | Figure 1. Sender-receiver synchronization |
 | Figure 2. Traditional receiver-receiver synchronization |
 | Figure 3. Receiver only synchronization |
3. Literature Review
- The word sensor means to perceive. Sensor is a device which converts a physical phenomenon into a signal to enable an observer to read it. Sensors are used to detect the electrical and optical signals and these act by converting the physical parameters into signals which in turn may be read electrically. Sensors are also known as a mote. A mote is always a node; however, a node is not always a mote. This is a tiny device with a small hardware and very limited memory. It runs on a minute battery. The sensor nodes gather and process the information before communicating it to the network. Sensor nodes being smaller and cheaper, and because of their various usages are rapidly making their place in the present day scientific technology like MEMS (Micro electro mechanical system). We can monitor the desired condition at any location with the help of these small sized devices. Sensors follow multi-hop communication when they are deployed at different locations.A node’s transmission range varies depending upon the protocol used in the transmission. Due to the limited resources, WSNs faces various challenges such as self-management, power restriction, storage restrictions, security and random topology. Multiple sensor nodes combine to make a network. Some of these nodes may act as control nodes. These nodes are wirelessly connected with each other and with the base station. A node is either a sensor node or a router node in nature. Base station is a platform where all the nodes send any form of information. Sensor nodes are very densely deployed. These follow multi hop communication and function like networks. Owing to the vulnerability, their security and reliability is a big challenge. Energy consideration, scalability, data aggregation and fault tolerance are the key features of WSNs protocol designing.A sensor network is comprised of sensor nodes, sink, sensor field and controller. Sensor nodes are the most important component of this network. They act by gathering and routing the information before transferring it to the sink. The information is transferred in very few messages leading to reduced energy consumption. WSNs are comprised of various sensor nodes which are densely deployed, few of them are control nodes also referred as base stations. These nodes are connected with each other wirelessly and base station connects them with some other network. Sensors are deployed in ad-hoc fashion to aggregate data from observing field. Less number of sensor nodes is deployed in an ad-hoc network than a sensor network. Nodes deployment may be random or deterministic, for deterministic deployment routs are predefined while for premier case it’s really very challenging. A sensor network is comprised of sensor nodes, sink, sensor field and controller. Sensor nodes are the most important component of this network. They act by gathering and routing the information before transferring it to the sink. The information is transferred in very few messages leading to the accuracy. WSNs have both advantages as well as disadvantages. Among the advantage, their implementation cost is less, the network may be deployed anywhere and they can be monitored through a global monitoring system. The disadvantages include inadequate security, difficulty in configuration and reduced speed as compared to a wired network.To aggregate data in a sensor network, clock synchronization is an important feature. Synchronization has been studied for long time for computer systems but traditional schemes are ineffective for sensor because of their different physical properties. Because of less energy at end sensor node it’s hard to synchronize nodes on common clock effectively and due to power consumption factor running the complex synchronization algorithms is difficult. In wired networks, network time protocol and global positioning system are useful methods for clock synchronization but are not suitable for wireless network because of their different characteristics. There are many factors that must be taken into account while designing a clock synchronization algorithm in sensor networks like energy efficiency, scalability, precision, robustness, life time, scope, and cost and size, thus a single protocol may not satisfy altogether. Clock synchronization is useful for communication between nodes in the network. It is required for proximity, location and also important due to imperfections in local oscillators due to which an event is not recorded at the same time.Wireless sensor networks have variety of applications ranging from domestic [14-16] to scientific fields [17-19], and purpose of communication is data processing [9, 10]. Looking into the needs it’s required to synchronize all nodes to a global clock because the basic operation is data fusion. Sensor network applications require that sensors in the network agree on the common time. By matching the sensor location and the sensing time, the sensor network may easily predict the transmitted information. But this is not an easy task as clock skew and clock offset disturb clock synchronization a lot. Node’s hardware oscillator shows clock as approximation
 of real time
of real time  as
as | (1) |
 denotes the rate of hardware oscillator and
denotes the rate of hardware oscillator and  denotes the time difference. Due to the imperfections and environmental changes rate of clock can be expressed as
denotes the time difference. Due to the imperfections and environmental changes rate of clock can be expressed as | (2) |
4. The CGCSA Description
- Our proposed scheme works in two phases i.e. Synchronization and cognition.
4.1. Synchronization and Cognition
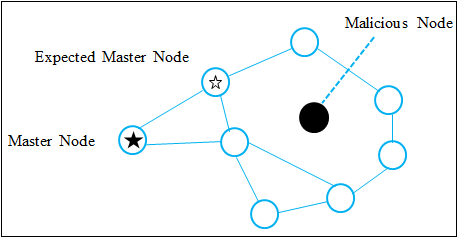
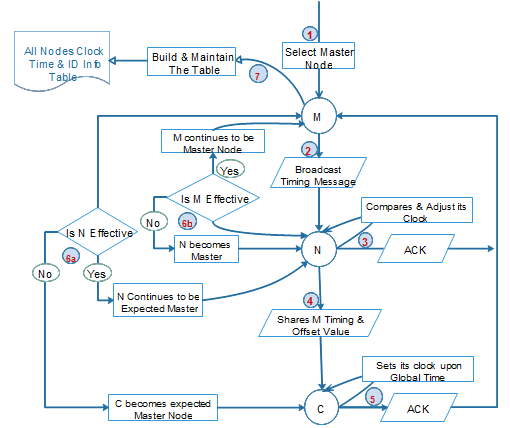
- Since sensor nodes are deployed in far flung areas therefore fault tolerant and accurate transmission is needed. Considering the needs we have designed CGCS protocol so that we can produce a simple, accurate and efficient time synchronization protocol. In our design the node with high energy level will be selected as the master node and if any child node fails to function our algorithm will discard it, as shown in Figure 4. And if master node or expected master node fails to function, this matter will be dealt with logically and intelligently. In other words, if the expected master node fails the master node will check its table and selects a new expected master node, and incase the master node fails, the expected master node will start functioning as the master node and will select its expected master node. The master node will form its table with the help of information provided to it by acknowledgement (ACK) messages from all the nodes.
 | Figure 4. Synchronization and cognition |
 | Figure 5. Block diagram of the algorithm |
5. Clock Model for the CGCS
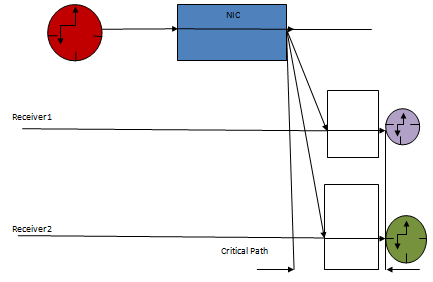
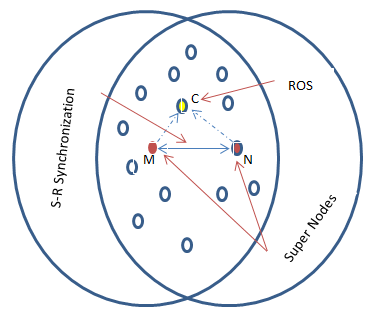
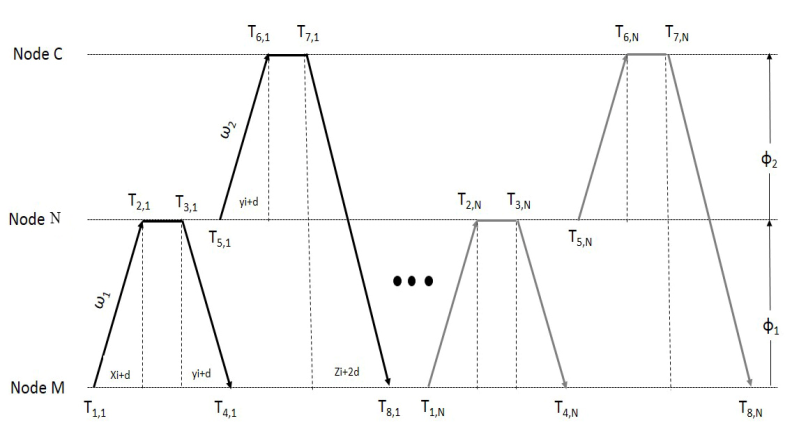
- The CGCS algorithm proposed is a new approach in clock synchronization domain to deal with faults in sensor networks and to achieve accurate clock synchronization for meaningful data fusion. The algorithm not only synchronizes the sensor nodes on mutually common time but also checks for the faulty nodes and takes decisions likewise.Due to environmental factors these tiny sensor nodes cannot survive malicious attacks in hostile environments [20, 22]. Implementation of cognitive algorithm is essential to discard malicious nodes and if master node gets faulty another node must take its place immediately so that the network remain synchronized. Taking an account on all bottlenecks like limited energy, smaller bandwidth and presence of faulty nodes, our aim turned into a novel clock synchronization algorithm which not only checks for the faults but also encounters with those faults very well. Beside of sender to receiver (S-R) synchronization and receiver to receiver (R-R) synchronization there exists another approach which is called as receiver only synchronization (ROS) [25]. In ROS a node overhears synchronization messages of two super nodes without communicating by itself, due to reduced transmissions this scheme saves energy.Message exchange mechanism for the CGCSA is illustrated in Figure 6.
 | Figure 6. Clock synchronization model of the CGCSA |
 | (3) |
 | (4) |
 | (5) |
 | (6) |
 are the time stamps between the three nodes,
are the time stamps between the three nodes,  is the clock offset between node M and node N while
is the clock offset between node M and node N while  is the clock offset between node N and the node C. Similarly
is the clock offset between node N and the node C. Similarly  is the clock skews present between node M and node N and
is the clock skews present between node M and node N and  is the clock skew existing between node N and node
is the clock skew existing between node N and node  is the fixed propagation delay and
is the fixed propagation delay and  are the random delays. Latency and jitter affect the performance of clock synchronization to a great extent. Fixed delays can be compensated easily but the latency changes with the passage of time. Random delays which can cause end to end latency are divided into four categories: send time, access time, propagation time and receive time.Equations (3), (4), (5) and (6) can be written in the form of random delays, like
are the random delays. Latency and jitter affect the performance of clock synchronization to a great extent. Fixed delays can be compensated easily but the latency changes with the passage of time. Random delays which can cause end to end latency are divided into four categories: send time, access time, propagation time and receive time.Equations (3), (4), (5) and (6) can be written in the form of random delays, like | (7) |
 | (8) |
 | (9) |
 | (10) |
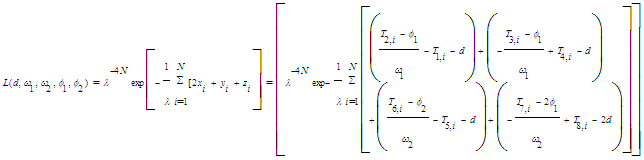 | (11) |
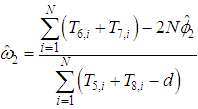
 and for getting the value of each individual parameter all other parameters are fixed and result is set equal to the 0. After derivation we get
and for getting the value of each individual parameter all other parameters are fixed and result is set equal to the 0. After derivation we get  | (12) |
 | (13) |
 | (14) |
 | (15) |
6. Simulations and Discussions
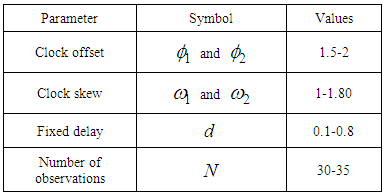
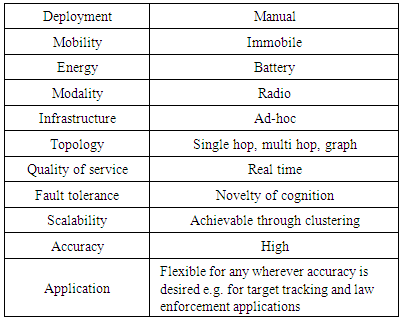
- In this section we discuss the numerical simulations which are carried out through MATLAB depending upon the measurement model to justify the performance of our proposed clock synchronization scheme. There exist three famous types of clock synchronization strategies i.e. S-R synchronization followed by TPSN [5], R-R synchronization adopted by RBS [4] and receiver only synchronization (ROS) presented in [25]. As CGCSA achieves synchronization as the hybrid of S-R and R_R synchronization so its performance is compared with the third type which is ROS scheme. The parameters set up for the simulations are represented in Table 1.
|
 and
and  versus the number of rounds of messages exchange. Curves in both plots for the values (1, 1.10, and 1.80) for
versus the number of rounds of messages exchange. Curves in both plots for the values (1, 1.10, and 1.80) for  and
and  clearly show that the MSE of the estimated clock offset show decreasing pattern and convergence as long as the number of rounds of messages exchange increase and it establishes the effectiveness of proposed estimator. It can also be seen in Figure 7 and Figure 8 that MSE of the clock offset is directly proportional to the clock skew values i.e. lesser is the clock skew value , lower will be the MSE of the estimated clock offset and vice versa. MSE of the clock offset is lowest without clock skew error.
clearly show that the MSE of the estimated clock offset show decreasing pattern and convergence as long as the number of rounds of messages exchange increase and it establishes the effectiveness of proposed estimator. It can also be seen in Figure 7 and Figure 8 that MSE of the clock offset is directly proportional to the clock skew values i.e. lesser is the clock skew value , lower will be the MSE of the estimated clock offset and vice versa. MSE of the clock offset is lowest without clock skew error.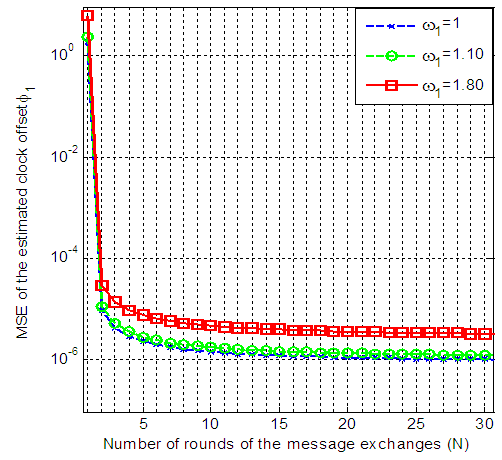 | Figure 7. MSE of the estimated clock offset between node M and node N versus number of rounds of message exchanges |
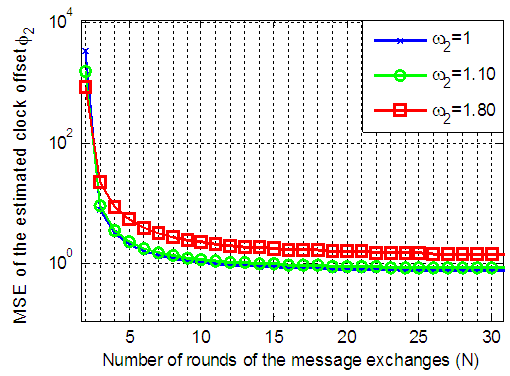 | Figure 8. MSE of the estimated clock offset between node N and node C versus number of rounds of message exchanges |
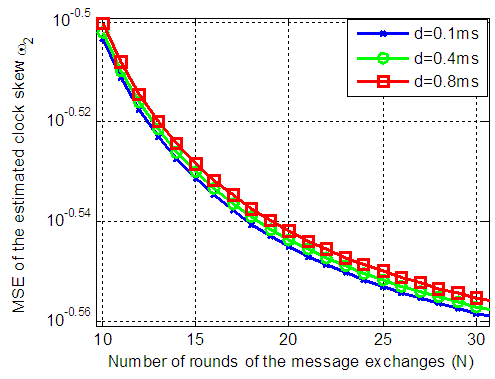
 and
and  versus the number of rounds of messages exchange is shown in Figure 9 and Figure 10 respectively. The fixed propagation delay
versus the number of rounds of messages exchange is shown in Figure 9 and Figure 10 respectively. The fixed propagation delay  is set to 0.1ms, 0.4ms and 0.8ms. We can see from both the figures that MSE of the clock skew converges with the passage of timing rounds. Distance between the nodes is directly concerned with the fixed propagation delay. Higher is the fixed propagation delay, longer is the distance and higher is the MSE of the estimated clock skew.
is set to 0.1ms, 0.4ms and 0.8ms. We can see from both the figures that MSE of the clock skew converges with the passage of timing rounds. Distance between the nodes is directly concerned with the fixed propagation delay. Higher is the fixed propagation delay, longer is the distance and higher is the MSE of the estimated clock skew.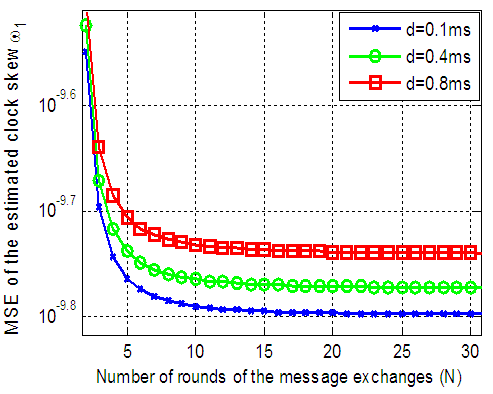 | Figure 9. MSE of the estimated clock skew  versus number of rounds of message exchanges versus number of rounds of message exchanges |
 | Figure 10. MSE of the estimated clock skew  versus number of rounds of message exchanges versus number of rounds of message exchanges |
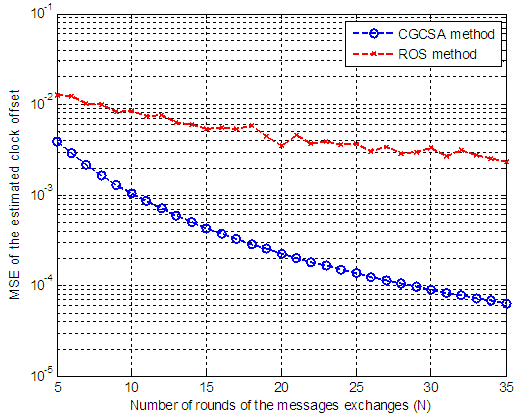 | Figure 11. Comparison of the MSEs of the clock offset of proposed scheme with ROS scheme |
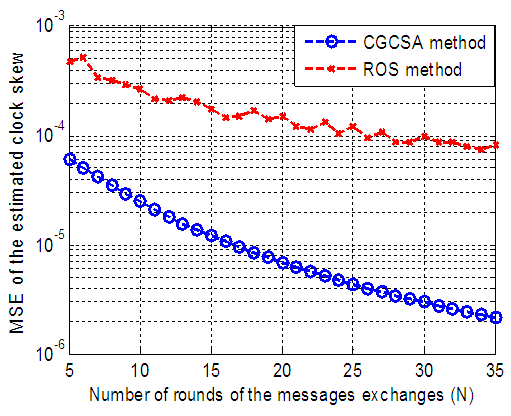 | Figure 12. Comparison of the MSEs of the clock skews of proposed scheme with ROS scheme |
|
 be the required timing messages in CGCS then
be the required timing messages in CGCS then  where
where  stands for the number of overall sensors in the network and
stands for the number of overall sensors in the network and  stands for the number of messages exchange between the nodes.Proof: Since every node in the network is connected to the master node and there are
stands for the number of messages exchange between the nodes.Proof: Since every node in the network is connected to the master node and there are  branches in hierarchical tree.
branches in hierarchical tree.  Timing messages are required for synchronization between the master node and the expected master node, moreover expected master node shares time readings upon message received from master node to the child node to compensate relative clock offset between them. Thus
Timing messages are required for synchronization between the master node and the expected master node, moreover expected master node shares time readings upon message received from master node to the child node to compensate relative clock offset between them. Thus 
7. Conclusions
- In this article useful and important feature cognition has been introduced and we study joint estimation of clock skew and offset in RTS mechanism. We investigated JMLE estimator. This paper combines the performance of RTS and a brief introduction of our fault tolerant novel algorithm. The proposed scheme is fully distributed, includes skew compensation even for the higher values of the clock skew like 1.80, computationally simple, accurate and easy to implement. It is obvious from the simulations that it reduces end to end latency. We have compared our algorithm with ROS scheme and found it more accurate. Message complexity is low in CGCSA and as a result accuracy is high. Clustering phenomenon is required for its implementation in larger networks. Same algorithm can be used for inter clustering synchronization and intra clustering synchronization, it will reduce energy consumption.As our future work we are focusing on energy consumption during synchronization periods and designing of the CGCSA with re-election the Ex-master node as a Master node. There are various interesting open research directions for future work. First the assumption of fixed d is same for all links is imprecise for the real sensor network. Second estimation of communication link delays will be quite interesting.
ACKNOWLEDGMENTS
- This work was financially supported by Shanghai Science and Technology Foundation (13510500400).