-
Paper Information
- Next Paper
- Previous Paper
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
Journal of Wireless Networking and Communications
p-ISSN: 2167-7328 e-ISSN: 2167-7336
2012; 2(5): 136-142
doi: 10.5923/j.jwnc.20120205.08
Location Recommendation on a Street Random Waypoint Mobility Model Based on Predictive Model
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-Text HTML
Full-Text HTMLWalisa Romsaiyud , Wichian Premchaiswadi
Graduate School of Information Technology, Siam University, 38 Petkasem rd., Bangkok, 10160, Thailand
Correspondence to: Walisa Romsaiyud , Graduate School of Information Technology, Siam University, 38 Petkasem rd., Bangkok, 10160, Thailand.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
Mobile Ad-Hoc Network (MANET) is a collection of mobile nodes which form a temporary network through wireless devices – without requiring any existing infrastructure. In the real world, user’s behaviour is depended on many major factors such as weather, situation, location, date and time. While mobile nodes can move with diverse patterns, it is difficult to accurately predict the events henceforward. In this paper, we propose an intelligence location-based recommendation system to predict a new route destination prediction method based on the movement history. On the whole, the following steps outline the methodology of our studies: First, we collect the mobile user’s movement history. We begin by scrutinizing the characteristics of movement patterns all the way through mobility trace files obtained from GPS. Second, we demonstrate how prediction can be made using the mobility model parameters to investigate the influence of other parameter variations using Bayes' theorem. Third, we propose a recommendation system for adjusting the weight function adaptively. Finally, through a series of experiments, our proposed method aims to deliver performance in terms of accuracy and applicability under various system conditions.
Keywords: Mobile Ad-hoc Network, Synthetic Models, Group Mobility Models, Bayesian Network, Collaborative Filtering
Cite this paper: Walisa Romsaiyud , Wichian Premchaiswadi , "Location Recommendation on a Street Random Waypoint Mobility Model Based on Predictive Model", Journal of Wireless Networking and Communications, Vol. 2 No. 5, 2012, pp. 136-142. doi: 10.5923/j.jwnc.20120205.08.
Article Outline
1. Introduction
- Mobile ad-hoc network is an autonomous system of mobile nodes connected by wireless links; each node operates as an end system and a router for all other nodes in the network. Furthermore, nodes in mobile ad-hoc network are free to move and organize themselves in an arbitrary fashion. Each mobile user is free to roam about while communication with others and display in diverse patterns. In the ideal case, user mobility is indeed changing over time and with the changes in the user mobility, based on user behaviours (shopping, wakeup, daily-life, etc.) and impact factors (working-hours, holidays, distance, velocity, obstacle, etc). Several research communities have addressed the issues as following: Kostov et al.,[1] proposed a prediction of the user’s destination using a concept of external information categories based on the history data of the moves obtained from a car navigator.[2, 3] They applied the Markov chain algorithm to build their predictors. It reads the string of locations –when a user has visited– over time in the order of which they were visited and build a location visiting history of each user. Konishi et al.,[4] designed and developed a network simulator called “MobiREAL”. It can simulate realistic mobility of humans and automobiles, and enable to change their behaviour depending on a given application context. They adopt a probabilistic rule-based model to describe behaviour of mobile nodes, which is often used in cognitive modelling of human behaviour. From many studies, we extended the idea that the proposed model allows us to describe how mobile nodes change their destinations, routes and speeds/directions based on their positions, surroundings (obstacles and neighbouring nodes), and information obtained from applications, and so on. Spindler et al.,[5] utilized a Collaborative Filtering (CF) technique that matched users based on social contexts rather than user interaction with the system. Users ua receives rating tuples from another users ub if they are within reachability in terms of duration of at least p. On the other hand, ratings are exchanged if the users consume an item simultaneously at least once.In this paper, we propose a new route destination prediction method based on the movement history including many parameter variations such as location, date, time, weather, which are stored in a trace file that subscribes location information from GPS. Moreover, factors with categories that have correlation to the user's destination based on entropy are extracted. The time and the day of the week attributes are divided into a fixed layered structure and the categories that contribute most for the decision of the future behaviour of the user are decided automatically. The past history movement, the categories that contain a cause-effect relation with the user’s destination also are chosen and the value of our method in destination recommendation experiments is shown. Furthermore, we learn from the experiment[6, 12, 25] how to detect a high resolution GPS fix and/or the GSM Cell-ID. The remainder of this paper is organized as follows. Section 2 presents some reviews and describes background on mobility pattern mining, prediction models and location services recommendation technique to improve individual preference results. Section 3 addresses the problem statement and proposal, describes the research design and shows the results from a preliminary study. Section 4 describes and discusses the results from the experiments. The final section provides a conclusion and ideas for future work.
2. Background
- In this section, we review related literature relating to the mobility mining conducted by other researchers. Accordingly, we classify the related literature into four main categories: Mobility Model, Radio Propagation Models, Routing Protocols for Ad-Hoc Networks and Network Simulators.
2.1. Mobility Models
- A mobility model defines the exact position of a mobile node at any time. Brownian movement[7], initial position of node randomly chooses a direction (uniformly distributed in[0, 2π]) and a travel speed (uniformly distributed in[speed min, speed max]). Random Waypoint, when a pause after the node has reached its destination point. After the pause, the node starts moving towards the next randomly chosen destination point and the process is repeated again. Bettstetter[8], investigated some of its fundamental stochastic properties with respect to: (a) the transition length and time of a mobile node between two waypoints, (b) the spatial distribution of nodes, (c) the direction angle at the beginning of a movement transition, and (d) the cell change rate if the model is used in a cellular-structured system area.
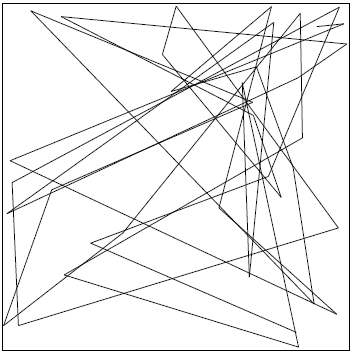 | Figure 1. Random Waypoint Mobility Model show movement pattern of a nodes[9] |
2.2. Radio Propagation Models
- Radio waves are exposed to reflection, diffraction or scattering based on the environmental conditions leading to multipath propagation. A radio signal can be successfully received when the signal to noise ratio (SNR) is above the receiver’s sensitivity. The received power can be calculated as:
 | (1) |
2.3. Routing Protocols for Ad-Hoc Networks
- Ad-Hoc on Demand Distance Vector (AODV) is a re-active routing protocol. Routes are calculated on demand when a node wants to send a data packet. The route discovery process is started when a source node S wants to send a data packet to a destination node D for which no route is available in the routing table of S. Node S floods a route request packet (RREQ) into the network. Perkins and Royer[13], proposed a new routing algorithm that is quite suitable for a dynamic self starting network, as required by users wishing to utilized ad-hoc networks. Optimized Link State Routing (OLSR) is a pro-active routing protocol based on link state. Network topology information is continuously distributed over the network and stored locally at each node. Continuous flooding generates a lot of redundancy, increases the possibility of collisions and wastes a lot of bandwidth. Munaretto et al.,[14] developed a quality-of-services (QoS) routing protocol for mobile ad hoc networks. They performed the proposed QoS-based routing in the optimized link state routing (OLSR) protocol, introducing a more appropriate metric than the hop distance.
2.4. Routing Protocols for Ad-Hoc Networks
- Reference Point Group Mobility Model (RPGM)[14-16, 20-21] model is one of the typical group mobility models, and it has a logical centre node as team leader that determined the group’s movement behaviour. The movement of group leader at time, t can be represented by motion vector
 ,[14, 15] provides the general motion trend of the whole group. The motion vector
,[14, 15] provides the general motion trend of the whole group. The motion vector  can be randomly chosen or carefully designed based on certain predefined paths. The movement of group members[19] is significantly affected by the movement of its group leader. For each node, mobility is assigned with a reference point that follows the group movement. Upon this predefined reference point, each mobile node could be randomly placed in the neighbourhood. The formally, motion vector of group member, I, at time t,
can be randomly chosen or carefully designed based on certain predefined paths. The movement of group members[19] is significantly affected by the movement of its group leader. For each node, mobility is assigned with a reference point that follows the group movement. Upon this predefined reference point, each mobile node could be randomly placed in the neighbourhood. The formally, motion vector of group member, I, at time t,  , can be described as:
, can be described as: | (2) |
 is a random vector deviated by group member i from its own reference point. The vector
is a random vector deviated by group member i from its own reference point. The vector  is an independent identically distributed random process whose length is uniformly distributed in the interval[0,
is an independent identically distributed random process whose length is uniformly distributed in the interval[0,  ] (where
] (where  is maximum allowed distance deviation) and whose direction is uniformly distributed in the interval[0, 2
is maximum allowed distance deviation) and whose direction is uniformly distributed in the interval[0, 2 ].
]. 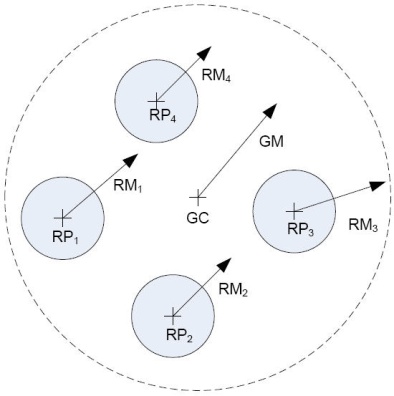 | Figure 2. Reference Point Group Mobility Model[3, 6] |
3. Mobility Prediction Based on Trace File
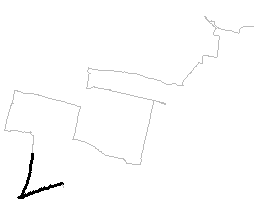
- In this section, we describe our algorithm which consists of three phases: user mobility pattern (UMP)[22-24, 26-29] mining, generation of mobility rules using the mined UMPs, and the mobility prediction. The next inter-cell movement of mobile users is predicted based on the mobility rules in the last phase. However, we proposed a new route destination prediction method based on the movement history including the many parameter variations such as location, date, time and weather which are stored in a trace file that subscribes location information from GPS as shown in Figure 3, 4 and 5.
 | Figure 3. Viewing trace 2011.09.04.04.56.08.gpx |
 | Figure 4. Viewing trace 2011.09.04.04.55.26.gpx |
 | Figure 5. Viewing trace 2011.08.28.05.17.19.gpx |
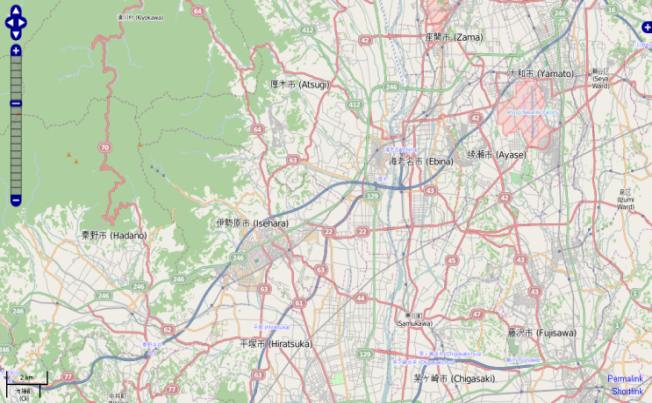 | Figure 6. A screenshot from the OpenStreetMap |
|
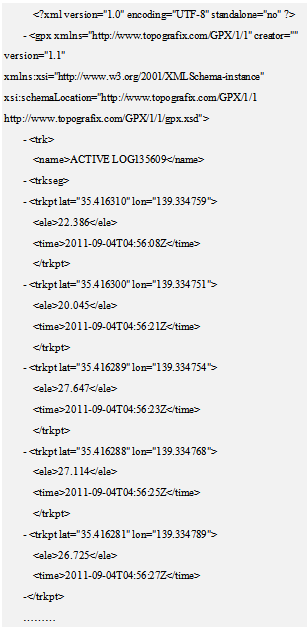 | Figure 7. The example XML mobility trace format |
4. System Design
- In this section, we describe the influencing factors analysis, movement factors and random factors as the following:
4.1. Influencing Factors
- Users must make different responses to different environments when moving in a cell. Therefore, location prediction should be assisted by the information about the terrain. The environmental factors used in the proposed model include both the concepts of a mobile communication system and the reality of the environment. The environmental factors are described as follows:• Cell ID: Cell information reflects the logical topology of mobile communication. The structure of a cell may be hexagonal or pentagonal or entirely irregular.• Road Length: The length of a road is used to calculate the residence time on a particular road. The location prediction model makes use of this information to predict when the user will leave the current cell.• Intersection location: The type of intersection is one of the key pieces of information in the process of location prediction. A user needs to make different choices for different types of intersections.• Spatial Feature: Since the terrain is three-dimensional, the velocity and acceleration will display certain behaviour while a mobile user is, for example, climbing. The location prediction model should recognize changes caused by such spatial features.• Other environment factors: Other statistical information may be used in the proposed model to reflect other environmental patterns.
4.2. Movement Factors
- Although the mobile behaviours are mainly controlled by users themselves, a series of regulations are shown in the process of movement before the users make a state changing choice.• p(x, y): Position information of a user that is used to describe the movement of a mobile user can be obtained using a global positioning system or through triangulation.• V (t): Current velocity of a user can be calculated through p(x, y). The model proposed in this paper divides users into three classes according to movement velocity.• a(t):When there are several roads provided to choose from, the acceleration of a mobile user can deliver some movement information in advance.• w(t): Angular velocity that changes sharply provides useful information for location prediction as it may indicate that the user is changing direction for some reasons.
4.3. Random Factors
- While a mobile user is moving, the key factor which can decide the future location of the user is the destination. However, currently there is no way to obtain this kind of information for every mobile communication system. There are also several factors that cannot be used to assist location prediction such as movement changing for emergency events, traffic jam caused by an accident, traffic control in special situations and so on.
5. Location Prediction Model Based Bayesian Network
- In this section, we describe the Bayesian Network Model, BNM, which is used in the location prediction model. In addition, a mechanism for distributing predictive factors is designed.
5.1. Construction of CRT based on Cell Environment
- In the proposed model, CRT (Cell and Road Topology) is used to denote the reality of a cell and road conditions. The identity of a cell is denoted as C = (C1, C2, ...,Ci), where i = 1, 2, ..., n. The sequence of road junctions is presented as J = (J1, J2, ..., Jj), where j is the maximum number of junctions. The method of CRT construction is: generation of a sequence of cell IDs C; generation of a sequence of roads R = (r1, r2, ..., rk) on the basis of cell and road junction information, the element of R denotes the road segment constructed by a cell and road junction, or two road junctions only.
5.2. Construction of RST based on CRT
- RST(G,E) (Road State Transition) is used to denote a transition of a user moving from the current road to another road, where G is the vertex set denoting the road segment in the model. E denotes the edge set of RST. The approach of RST generation is as following: each elements of R (r0, r1, ..., rk) is added into the RST vertex set; For

 G,
G,  and i = j, if ri and rj have a common junction, set the edge < ri, rj > belongs to E. As an example, one user may be moving in road ri and be close to junction Jj , there are then roads r2, r7, r8, r1 to choose from. The resultant choices are decided on the basis of previous movement information and user movement status. Three edges are generated in RST including < r1, r2 >,< r1, r7 >,< r1, r8 >.
and i = j, if ri and rj have a common junction, set the edge < ri, rj > belongs to E. As an example, one user may be moving in road ri and be close to junction Jj , there are then roads r2, r7, r8, r1 to choose from. The resultant choices are decided on the basis of previous movement information and user movement status. Three edges are generated in RST including < r1, r2 >,< r1, r7 >,< r1, r8 >.5.3. Construction of PDN based RST
| |||||||||||||||||||||||||||||||||||||||||||||||||||
6. Conclusions
- In this paper, we apply a Bayesian Network Model to predict a new route anchored in the mobility pattern mining of trace files obtained from GPS. We all know that mobile nodes move with diverse patterns, therefore it is difficult to accurately predict the events henceforward. Through accurate prediction of mobile user movements, our algorithm aims to deliver performance in terms of accuracy and applicability under various system conditions. Our proposed algorithm consists of three steps as the following; first, we collect the mobile user’s movement history. Second, we demonstrate how prediction can be made via mobility model parameters to investigate the influence of other parameter variations using Bayes' theorem. Third, we propose a new route destination prediction system for adjusting the weight function adaptively. The algorithm has been simulated through a realistic mobility pattern generator. Consequently, prediction model results show that the system achieves high prediction accuracy when the combined decision scheme is adopted. Prediction accuracy on the order of 70–80 percent seems very promising for mobile/wireless computing solutions and architectures.In future work, we will focus on developing an autonomous group mobility prediction model in order to simulate the behaviour of mobile Ad-hocs through wireless networks. We will propose a new group mobility model to predict the next movements of the group mobile users travelling between the cells of a PCS or GSM network as the.
ACKNOWLEDGEMENTS
- The authors would like to thank the anonymous reviewers for their valuable feedbacks and suggestions for this work. We would also like to acknowledge support from the Graduate School of Information Technology at Siam University.
References
| [1] | Vlaho Kostov, Jun Ozawa, Mototaka Yoshioka and Takahiro Kudoh, “Travel Destination Prediction Using Frequent Crossing Pattern from Driving History”, in Proceedings of 2005 IEEE 8th International Conference on Intelligence transportation systems, pp. 970-977, 2005. |
| [2] | Jeeyoung Kim and Ahmed Helmy, “The Evolution of WLAN User Mobility and Its Effect on Prediction”, in Proceedings of 2011 IEEE 7th International Conference on Wireless Communications and Mobile Computing, pp. 226-231, 2011. |
| [3] | Karoly Lendvai, Peter Fulop, Sandor Szabo and Tamas Szalka, “Precise Location Prediction Algorithms Using Improved Random Walk based and Generalized Markovian Mobility Models”, in Proceedings of 2008 IEEE 13th International Conference on Telecommunications Network Strategy and Planning Symposium, pp. 1-12, 2008. |
| [4] | Kazuki Konishi, Kumiko Maeda, Kazuki Sato, Akiko Yamasaki, Hirozumi Yamaguchi, Keiichi Yasumoto and Teruo Higashino, “MobiREAL Simulator- Evaluating MANET Applications in Real Environments”, in Proceedings of 2005 IEEE 13th International Symposium on Modeling, Analysis, and Simulation of Computer and Telecommunication Systems, pp. 499-502, 2005. |
| [5] | Alexandre de Spindler, Moira C. Norrie, Michael Grossniklaus and Beat Signer, “Spatio-Temporal Proximity as a Basis for Collaborative Filtering in Mobile Environments”, in Proceedings of 2006 IEEE 18th International Conference on Advanced Information Systems Engineering, pp. 912-926, 2006. |
| [6] | Romsaiyud W. and Premchaiswadi W., “Intelligence Switching Method on Mobile Application for Cell-ID/GPS Positioning Systems”, in Proceedings of 2009 IEEE 7th International Conference on ICT and Knowledge Engineering, pp. 83-88, 2009. |
| [7] | Albert Einstein, “Investigations on the theory of the Brownian movement”, Dover Publications, 1956. |
| [8] | Christian Bettstetter, Hannes Hartenstein and Xavier Perez-Costa, “Stochastic Properties of the Random Waypoint Mobility Model”, Kluwer Academic Publishers, Journal of Wireless Networks , Vol. 10, no.5 , pp. 555-567, 2004. |
| [9] | Philipp Sommer, “Design and Analysis of Realistic Mobility Models for Wireless Mesh Networks”, M. Eng. Thesis, Department of Information Technology and Electrical Engineering, Zurich, Switzerland, 2007. |
| [10] | M. Sivahothi and E.R. Naganathan, “Analysis of Reference Point Group Mobility Model in Mobile Ad hoc Networks with an Ant Based Colony Protocol”, in Proceedings of 2009 International MultiConference of Engineers and Compujter Scientists, Vol 1(5), pp.342-346, 2009. |
| [11] | David R. Choffnes and Fabian E. Bustamante, “An integrated mobility and traffic model for vehicular wireless networks”, in Proceedings of 2005 ACM 2nd International workshop on Vehicular ad hoc networks, pp. 69-78, 2005. |
| [12] | Premchaiswadi W., Romsaiyud W. and Premchaiswadi N., “Navigation without GPS: Fake Location for Mobile Phone Tracking”, in Proceedings of 2011 IEEE 11th International Conference on ITS Telecommunications, pp. 195-200, 2011. |
| [13] | Vinay Sridhara and Stephan Bohacek, “Realistic propagation simulation of urban mesh networks”, Elsevier North-Holland, Journal of Computer Networks: The International Journal of Computer and Telecommunications Networksing, Vol. 52(12), pp. 3392-3412, 2007. |
| [14] | Charles E. Perkins and Elizabeth M. Royer, “Ad-hoc On-Demand Distance Vector Routing”, in Proceedings of 1999 IEEE 2nd International Conference on Mobile Computing Systems and Applications, pp. 90-100, 1999. |
| [15] | Munaretto A., Badis H., Al Agha, K. and Pujolee G., “A link-state QoS routing protocol for ad hoc networks”, in Proceedings of 2002 IEEE 4th International Workshop on Mobile and Wireless Communications Networks, pp. 222-226, 2002. |
| [16] | Nam: Network Animator, Information Sciences Institute – The Univesity of Sourthern California, Website. Available: http://www.sis.edu/nsnam/nam/(Accessed Sept 16, 2007). |
| [17] | Xiang Zeng, Rajive Bargrodia and Mario Gerla, GloMoSim, “A Library for parallel simulation of large-scale wireless networks”, in Proceedings of 1998 IEEE 12th International Conference on Parallel and Distributed Simulation, pp. 154-161, 1998. |
| [18] | G Y. Saygin and O. Ulusoy, “Exploiting data mining techniques for broadcasting data in mobile computing environments”, IEEE Education Activities Department Piscataway, Journal of IEEE Transactions on Knowledge and Data Engineering, Vol.14 (6), pp.1387–1399, 2002. |
| [19] | G. Gok and O. Ulusoy, “Transmission of continuous query results in mobile computing systems”, Elsevier Science Inc., Journal of Information Sciences-Applications, Vol. 125(1-4), pp.37–63, 2000. |
| [20] | I.F. Akyildiz, S.M. Ho and Y.-B. Lin, “Movement-based location update and selective paging for PCS networks”, IEEE Press Piscataway, Journal of IEEE/ACM Transactions on Networking (TON), vol. 4(4), pp. 629–639, 1996. |
| [21] | B. Lianga and Z. Haas, “Predictive distance-based mobility management for PCS networks”, in Proceedings of 1999 IEEE 18th International Conference on Computer and Communications, pp. 1377–1384, 1999. |
| [22] | G.Y. Liu and M.Q. Gerald, “A predictive mobility management algorithm for wireless mobile computing and communications”, in Proceedings of 1995 IEEE 4th International Conference on Universal Personal Communications, pp. 268–272, 1995. |
| [23] | T. Liu, P. Bahl and I. Chlamtac, “Mobility modeling, location tracking, and trajectory prediction in wireless ATM networks”, IEEE Press Piscataway, Journal of IEEE on Selected Areas in Communications, vol. 16(6), pp. 922–936, 1998. |
| [24] | D. Katsaros, A. Nanopoulos, M. Karakaya, G. Yavas, O. Ulusoy and Y. Manolopoulos, “Clustering mobile trajectories for resource allocation in mobile environments”, in Proceedings of the Intelligent Data Analysis Conference, Springer-Verlag, Lecture Notes in Computer Science, vol. 2810, pp. 319-329, 2003. |
| [25] | S. Rajagopal, R.B. Srinivasan, R.B. Narayan and X.B.C. Petit, “GPS-based predictive resource allocation in cellular networks”, in Proceedings of 2002 IEEE 10th International Conference on Networks, pp. 229–234, 2002. |
| [26] | H.-K. Wu, M.-H. Jin, J.-T. Horng and C.-Y. Ke, “Personal paging area design based on mobile’s moving behaviors”, in Proceedings of 2001 IEEE 30th International Conference on Computer and Communications, pp. 21–30, 2001. |
| [27] | Kuboye B.M., Alese B.K., Fajuyikgbe O. and Adewale O.S., “Development of Models for Managing Network Congestion on Global System for Mobile Communication (GSM) in Nigeria”, Scientific & Academic Publishing, Journal of Wireless Networking and Communications, vol. 1(1), pp. 8-15, 2011. |
| [28] | A. Aljadhai and T. Znati, “Predictive mobility support for QoS provisioning in mobile wireless environments”, IEEE Press Piscataway, Journal of IEEE on Selected Areas in Communications, vol.19(10), pp.1915–1930, 2001. |
| [29] | Sheng-Hao Chung, Wei-Han Chang and Lin K.W., “A data mining algorithm for mining region-aware cyclic patterns”, in Proceedings of 2011 IEEE 11th International Conference on Hybrid Intelligent Systems, pp.709-713, 2011. |
| [30] | Cheng-Lin Tsao, Yu eh-Ting Wu, Wanjiun Liao and Jia-Chun Kuo, “Link duration of the random way point model in mobile ad-hoc networks”, in Proceedings of 2006 IEEE 7th International Conference on Wireless Communications and Networking, pp. 367-371, 2006. |