-
Paper Information
- Next Paper
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
Journal of Mechanical Engineering and Automation
p-ISSN: 2163-2405 e-ISSN: 2163-2413
2017; 7(5): 131-134
doi:10.5923/j.jmea.20170705.01

Experimental Investigation of Frictional Force in a Hydrodynamic Journal Bearing Lubricated with Magnetorheological Fluid
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLNeil Vaz, Binu K. G., Pruthivi Serrao, Hemanth M. P., Jeffin Jacob, Nirmal Roy, Eric Dias
Department Mechanical Engineering, St Joseph Engineering College, Mangaluru, India (Affiliated to VTU)
Correspondence to: Neil Vaz, Department Mechanical Engineering, St Joseph Engineering College, Mangaluru, India (Affiliated to VTU).
| Email: |  |
Copyright © 2017 Scientific & Academic Publishing. All Rights Reserved.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

Variations in frictional force developed in the journal bearing lubricated with Magnetorheological (MR) fluid was investigated. Also, a comparative study was conducted between MR fluids and SAE15W40 grade engine oil on the performance characteristics. A test bearing set-up was developed to accommodate MR fluid film with provision for varying magnetic field. MR Fluid was formulated by dispersing electrolytic grade micron sized iron particles in silicon oil base fluid in 0.3 volume fraction. The results of the experimental testing indicated an increase in frictional force with increasing excitation current in the electromagnetic cores of journal bearing for similar loads and speeds in comparison to plain engine oil; the presence of MR fluid causes an increase in viscosity in comparison to plain engine oil and thus holds a great potential to increase the load carrying capacity of the journal bearing.
Keywords: Journal bearings, Magnetorheological fluids (MRFs), Hydrodynamic lubrication
Cite this paper: Neil Vaz, Binu K. G., Pruthivi Serrao, Hemanth M. P., Jeffin Jacob, Nirmal Roy, Eric Dias, Experimental Investigation of Frictional Force in a Hydrodynamic Journal Bearing Lubricated with Magnetorheological Fluid, Journal of Mechanical Engineering and Automation, Vol. 7 No. 5, 2017, pp. 131-134. doi: 10.5923/j.jmea.20170705.01.
Article Outline
1. Introduction
- In rotating machinery, the dynamic stiffness and damping of the structure which supports the rotating shaft has a significant effect on the machine vibration. In particular it affects the machine critical speeds, the vibration in between critical speeds and the forces. In rotating machinery, the dynamic stiffness and damping of the structure which supports the rotating shaft has a significant effect on the machine vibration. In particular it affects the machine critical speeds, the vibration in between critical speeds and the forces voltage rapidly transforms these fluids from Newtonian to pseudo-plastic materials with higher apparent viscosity. The phenomenon of electro-rheology was first reported by Winslow and occasionally bears his name, i.e. Winslow effect. It appears as an increased resistance in flow, and in some cases, the fluid converts itself to a solid when an increase of the electric field takes place.Magnetorheological fluid (MRF) is a manageable fluid that exhibits drastic changes in rheological properties which is adjustable and interchangeable to the applied magnetic field strength. The MRFs behave like the normal fluids having normal viscosity in the absence of an external magnetic field, but in the presence of a strong magnetic field it solidifies immediately to a grease state. Hence, the fluid is potentially advantageous to be employed as a replacement to conventional journal bearings particularly for high speed applications.Controllable bearings using smart fluidsAnother category of controllable bearings seeks to incorporate “active” or “smart” fluids into bearing applications to introduce “smart” behavior. These smart fluids usually exhibit field dependent properties that could be altered by external physical fields. Typical kinds of these materials used in fluid film bearings are the electrorheological and magnetorheological fluids (ERF & MRF). Typical structures of these two fluids are similar, ingredients of both including one carrier fluid and active particles that react to external electric or magnetic fields. The external field (electric or magnetic) will induce the so-called yield stress [1, 2] in the fluid, increasing the apparent viscosities of the fluids, which will then alter the behaviour of the bearings. Hesselbach and Guldbakke [3, 4] firstly applied the MRF into hydrostatic bearings. Using MRF as lubricant, their hydrostatic thrust bearing maintained a constant bearing gap under different payloads. And quicker response to the change of payloads was also observed in the bearing with MRF than with conventional valve based systems. Based on the experimental results, they concluded that in closed loop control, the bearing would achieve quasi- infinite stiffness. The MRF is categorized as a non-Newtonian fluid, or rather, the Bingham fluid, which behaves like a rigid solid at low stresses but flows like a viscous fluid at high stress. In hydrodynamic lubrication, therefore, the Bingham model is generally used to describe the lubricating behavior of the MRF. Wada et al. [5] and Tichy [6] incorporated the Bingham model into fluid momentum equations to describe the core formation in the oil film of Bingham fluids. Urreta et al. [7] tested a journal bearing lubricated with MRF or ferrofluid, concluding that the MRF is more suitable in journal bearing control than the ferrofluid. In the application of MRF, a phenomenon called shear-thinning effect has been observed by researchers [8, 9]. When external magnetic field is applied, microstructure of the MRF would change, i.e. randomly distributed particles would form chains and pillars. This is basically the mechanism of the smart behavior of the MRF. When boundary shear is high, however, these chain and pillar structure will break and performance of the MRF is then reduced. In the hydrodynamic bearing, since surface speed of the rotor is high and clearance between the rotor surface and bearing inner surface is small, shear rate in the lubricant film this effect is the main issue to be considered when applying MRF to bearings as lubricant.
2. Experimental Setup
- The experimental setup consists of bearing assembly with winding, shaft, two plummer blocks, frame, loading system.
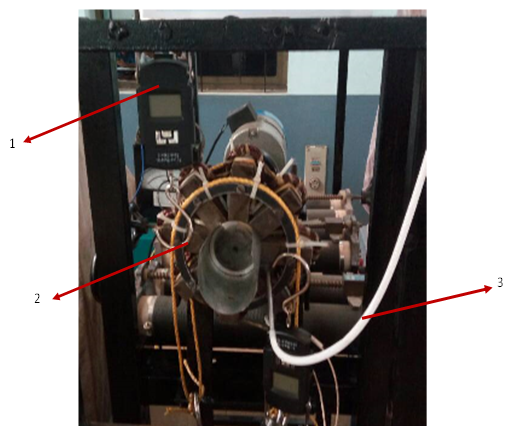 | Figure 1. Bearing assembly in the rig |
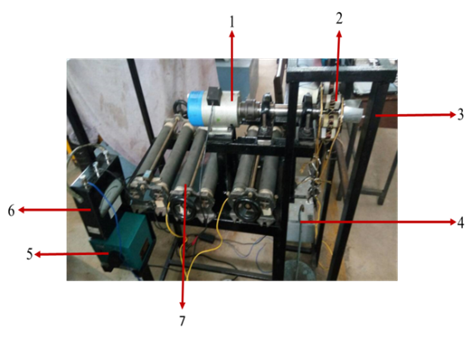 | Figure 2. Bearing assembly with rheostat and ammeter |
3. Results and Discussions
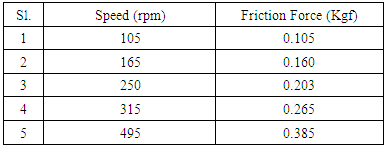
- The frictional force measurement was done using the apparatus for both engine oil (15W40) and MR fluid. Table 1 indicates the variation of frictional force at different speeds using engine oil as the lubricant.
|
|
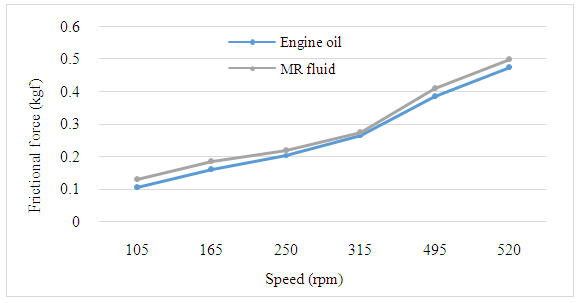 | Figure 3. Comparison of the variation of frictional force using MR fluid and Engine oil |
3.1. Magnetization Effect
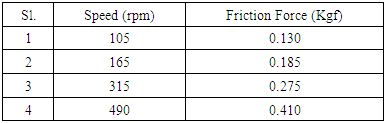
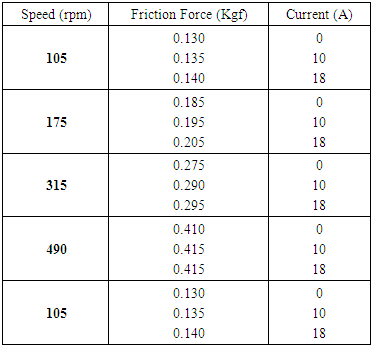
- The magnetization effect on the friction force was studied for volume fraction 0.3. Table 3 shows the variation of frictional force for different speeds of shaft with variation of current in the coils. The frictional force generated at the bearing increases with increase in the value of current. As the speed of the shaft increase the frictional force also increase.
|
|

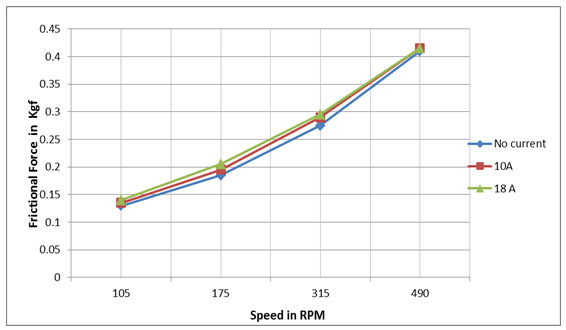 | Figure 4. Variation of frictional force for different speeds and different currents with MR fluids |
4. Conclusions
- The following conclusions were derived from the study:1. The results of the experimental testing indicated that, an increase in frictional force of journal bearing for similar loads and speeds in comparison to plain engine oil. 2. The frictional force was also observed to increase with excitation current in the electromagnetic cores. 3. Frictional force in a journal bearing is manifested due to the shearing stress within the hydrodynamic lubricant film. The shear stress is developed due to the viscous shear of the film. It is therefore, concluded that, the presence of MR fluids causes an increase in viscosity in comparison to plain engine oil. 4. The load bearing capacity of journal bearing being a function of viscosity of lubricant, it is concluded that addition of MR fluid holds potential to increase the load carrying capacity of the journal bearing.5. The feasibility of using MR Fluid as lubricant is proved in this project. Issues related to blockage of lubricant supply due to magnetic field were overcome.