| [1] | J. Christensen, J. L. Nielsen, M. S. Svendsen and P. F. Orts, Development, Modeling and Control of a Humanoid Robot. Master’s Thesis, Spring 2007. Department of Electronic Systems, Alborg University, Alborg, Denmark. |
| [2] | C. Venkatayogi, Simulation of a Humanoid Robot. In partial fulfillment of the requirements for the degree Master of Science 2007, Rush College of Engineering and Technology of Ohio University, USA. |
| [3] | M. R. A. Saavedra, Stable Locomotion of Humanoid Robots based on Mass Concentrated Model. Ph.D. Thesis, Department of System and Automation Engineering, Universidad Carlos III de Madrid, Madrid, Spain. |
| [4] | C. Chevallereau, G. Bessonnet, G. Adda and Y. Aoustin, Bipedal Robots Modeling, Design and walking Synthesis (ISTE Ltd. and John Wiley & Sons, Inc. 2009.) |
| [5] | I. W. Park, J. Y. Kim, S. W. Park and J. H. Oh, Development of Humanoid Robot Platform KHR-2 (KAIST Humanoid Robot - 2). IEEE/RAS International Conference on Humanoid Robots, 2004. Vol. 1, 292-310. |
| [6] | I. W. Park, J. Y. Kim, J. Lee and J. H. Oh, Mechanical Design of Humanoid Robot Platform KHR-3(KAIST Humanoid Robot - 3: HUBO). Proceedings of 2005 5th IEEE/RAS International Conference on Humanoid Robots. 2005. 321-326. |
| [7] | K. Kaneko, K. Miura, F. Kanehiro, M. Morisawa, S. Nakaoka and S. Kajita, Cybernetic Human HRP-4C. Proc. of 9th IEEE-RAS International Conference on Humanoid Robots, Paris, France, Dec. 7-10, 2009. 7-14. |
| [8] | M. Akhratuzzaman and A. A. Shafie, Advancement of Android and Contribution of Various Countries in the Research and Development of the Humanoid Platform. International Journal of Robotics and Automation (IJRA), Volume (1): Issue (2), 2010. Computer Science Journal (CSC Journal), Malaysia. 43-57. |
| [9] | M. Akhtaruzzaman and A. A. Shafie, Evolution of Humanoid Robot and Contribution of Various Countries in Advancing the Research and Development of the Platform. Proc. of International Conference on Control, Automation and Systems (ICCAS), KINTEX, Gyeonggi-do, Korea, Oct. 27-30, 2010. 1021-1028. |
| [10] | C. Fu and K. Chen, Gait Synthesis and Sensory Control of Stair Climbing for a Humanoid Robot. IEEE Transactions On Industrial Electronics, Vol. 55, No. 5, May 2008, 2111-2120. |
| [11] | S. H. Kim and Y. Sankai, Stair Climbing Task of Humanoid Robot by Phase Composition and Phase Sequence. 2005 IEEE International Workshop on Robots and Human Interactive Communication, ROMAN 2005. 531-536. |
| [12] | T. H. S. Li, Y. T. Su, C. H. Kuo, C. Y. Chen, C. L. Hsu and M. F. Lu, Stair-Climbing Control of Humanoid Robot using Force and Accelerometer Sensors. SICE Annual Conference 2007 Sept. 17-20, 2007, Kagawa University, Japan. 2115-2120. |
| [13] | P. Michel, J. Chestnutt, S. Kagami, K. Nishiwaki, J. Kuffner and T. Kanade, GPU-accelerated Real-Time 3D Tracking for Humanoid Locomotion and Stair Climbing. Proc. of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, Oct 29 - Nov 2, 2007. 463-469. |
| [14] | M. Akhtaruzzaman and A. A. Shafie, Geometrical Analysis on BIOLOID Humanoid System Standing on Single Leg. Proc. of 2011 4th International Conference on Mechatronics (ICOM `11), 17-19 May 2011, Kuala Lumpur, Malaysia. |
| [15] | M. Akhtaruzzaman and A. A. Shafie, An Attempt to Develop a Biped Intelligent Machine BIM-UIA. Proc. of 2011 4th International Conference on Mechatronics (ICOM `11), 17-19 May 2011, Kuala Lumpur, Malaysia. |
| [16] | M. Akhtaruzzaman and A. A. Shafie, A Novel Gait for Toddler Biped and its Control Using PIC 16F877A. Proc. of 2011 4th International Conference on Mechatronics (ICOM `11), 17-19 May 2011, Kuala Lumpur, Malaysia. |
| [17] | M. A. Akhter. Accumulation of Research, LAP Lambert Academic Publishing, 2011. |
| [18] | M. Eaton, Further Explorations in Evolutionary Humanoid Robotics. Proc. of 12th International Symposium on Artificial Life and Robotics (ISAROB), January 25 – 27, 2007, Oita, Japan. 133-137. |
| [19] | F. A. Siddiky, N. H. Siddique and M. Tokhi, A New Approach to Design and Control of Biped Robot with Minimal Number of Actuators. Proc. of International Conference on Climbing and Walking Robots and Support Technologies for Mobile Machines, 09th September 2009. 115–122. |
| [20] | A. Konno, K. Nagashima, R. Furukawa, K. Nishiwaki, T. Noda, M. Inaba and H. Inoue, Development of a Humanoid Robot Saika. Proc. of IROS 1997. 805-810. |
| [21] | D. Wollherr, M. Hardt, M. Buss and O. V. Stryk, Actuator Selection and Hardware Realizationof a Small and Fast-Moving, Autonomous Humanoid Robot. Proc. of the 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems, Sept. 30 – Oct. 4, 2002, Lausanne, Switzerland. 2491-2496. |
| [22] | E. Choong, C. M. Chew, A. N. Poo and G. S. Hong. Mechanical Design of an Anthropomorphic Bipedal Robot. First Humanoid, Nanotechnology, Information Technology, Communication and Control Environment and Management (HNICEM) International Conference, March 27-30, 2003, Manila, Philippines. |
| [23] | R. Beira, M. Lopes, M. Praca, J. S. Victor, A. Bernardino, G. Mettay, F. Becchiz and R. Saltaren, Design of the Robot-Cub (iCub) Head. Proc. of IEEE International Conference on Robotics and Automation, May 2006, Orlando. |
| [24] | D. Gouaillier, V. Hugel and P. Blazevic, Mechatronic design of NAO humanoid. Proc. of 2009 IEEE International Conference on Robotics and Automation, Kobe International Conference Center, Kobe, Japan, May 12-17, 2009. 769-774. |
| [25] | V. V. Madadi and S. Tosunoglu, Design and Development of a Biped Robot. Proc. of the 2007 IEEE International Symposium on Computational Intelligence in Robotics and Automation. Jacksonville, FL, USA, June 20-23, 2007. 243-247. |
| [26] | Y. Matsusaka. History and Current Researches on Building a Human Interface for Humanoid Robots. In Proceedings of ZiF Workshop 2006. 109-124. |
| [27] | T. Sugihara and H. Kobayashi. A Handy Humanoid Robot Navigation by Non-interruptive Switching of Guided Point and Synergetic Points. Proc. of the 8th IEEE-RAS International Conference on Humanoid Robots, December 1-3, 2008, Daejeon, Korea. |
| [28] | J. S. Gutmann, M. Fukuchi and M. Fujita. A Modular Architecture for Humanoid Robot Navigation. Proc. of 2005 5th IEEE-RAS International Conference on Humanoid Robots, 5th Dec. 2005, 26-31. |
| [29] | N. T. Phuong, D. W. Kim, H. K. Kim and S. B. Kim. An Optimal Control Method for Biped Robot with Stable Walking Gait. Proc. of the 8th IEEE-RAS International Conference on Humanoid Robots, December 1-3, 2008, Daejeon, Korea, 211-218. |
| [30] | C. L. Shih. Ascending and Descending Stairs for a Biped Robot. IEEE Transactions On Systems, Man and Cybernetics, Part A: Systems And Humans, Vol. 29, May 1999, 255-268. |
| [31] | Y. Guan, K. Yokoi, N. E. San and K. Tanie. Feasibility of Humanoid Robots Stepping over Obstacles. Proceedings of 2004 IEEWRSJ International Conference on intelligent Robots and Systems. September 28 -October 2,2004, Sendal, Japan. 130-135. |
| [32] | Y. Guan, N. E. Sian and K. Yokoi. Motion Planning for Humanoid Robots Stepping over Obstacles. IEEE/RSJ International Conference on Intelligent Robots and Systems, (IROS 2005), 2005. 363-369. |
| [33] | G. Capi, Y. Nasu, L. Barolli and K. Mitobe. Real time gait generation for autonomous humanoid robots: A case study for walking. Robotics and Autonomous Systems 42 (2003), Elsevier Science B.V. 107-116. |
| [34] | J. Chestnutt, M. Lau, G. Cheung, J. Kuffner, J. Hodgins and T. Kanade. Footstep Planning for the Honda ASIMO Humanoid. Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, April 2005. 629-634. |
| [35] | D. Katic and M. Vukobratovic. Survey of Intelligent Control Techniques for Humanoid Robots. Journal of Intelligent and Robotic Systems 37: 2003. Kluwer Academic Publishers. Printed in the Netherlands. 117–141. |
| [36] | C. Chevallereau, G. Bessonnet, G. Adda and Y. Aoustin. Bipedal Robots Modeling, Design and walking Synthesis. ISTE Ltd. and John Wiley & Sons, 2009. 47-70. |
| [37] | K. Kaneko, F. Kanehiro, S. Kajita, K. Yokoyama, K. Akachi, T. Kawasaki, S. Ota and T. Isozumi. Design of Prototype Humanoid Robotics Platform for HRP. Proceedings of the 2002 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems EPFL, Lausanne, Switzerland. October 2002. 2431-2436. |
| [38] | D. Mewes and A. Heloir (2008). The Uncanny Valley. Seminar report, DFKI and Saarland University, 2008, [Online]. Available: http://embots.dfki.de/doc/seminar_ss09/writeup%20uncanny%20valley.pdf |
| [39] | J. Carpenter, J. M. Davis, N. E. Stewart, T. R. Lee, J. D. Bransford and N. Vye. Gender Representation and Humanoid Robots Designed for Domestic Use. International Journal of Social Robots, March 19, 2009. Springer Science & Business Media. 261-265. |
| [40] | M. Akhtaruzzaman and A. A. Shafie. Evolution of Humanoid Robots and Contribution of Various Countries in Advancing the Research and Development of the Platform. The International Conference on Control, Automation and Systems (ICCAS), Oct. 27-30, 2010 in KINTEX, Gyeonggi-do, Korea. 1021–1028. |
| [41] | M. Stilman, K. Nishiwaki, S. Kagami and J. J. Kuffner. Planning and Executing Navigation Among Movable Obstacles. Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, October 9 - 15, 2006, Beijing, China. 820-826. |
| [42] | R. Simmons and S. Koenig. Probabilistic Robot Navigation in Partially Observable Environments. Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI '95), July, 1995. 1080-1087. |
| [43] | R. Tse, A. Tay and W. Hutama. Robot Navigation using KFLANN Place Field. Proceedings of the 2008 IEEE International Conference on Systems, Man and Cybernetics (SMC 2008), 12-15 Oct. 2008, Singapore. 3034-3039. |
| [44] | M. Abdallah and A. Goswami. A Biomechanically Motivated Two-Phase Strategy for Biped Upright Balance Control. Proceedings of the 2005 IEEE International Conference on Robotics and Automation Barcelona, Spain, April 2005. 2008 – 2013. |
| [45] | A. Goswami. Kinematic and dynamic analogies between planar biped robots and the reaction mass pendulum (RMP) model. 8th IEEE-RAS International Conference on Humanoid Robots. 1-3 Dec. 2008, Daejeon, Korea. 182 – 188. |
| [46] | C. Zhou, P. K. Yue, J. Ni1 and S. B. Chan. Dynamically Stable Gait Planning for a Humanoid Robot to Climb Sloping Surface. Proceedings of the 2004 IEEE Conference on Robotics, Automation and Mechatronics Singapore, 1-3 December, 2004. 341-346. |
| [47] | P. Gibbons, M. Mason, A. Vicente, G. Bugmann and P. Culverhouse. Optimization of Dynamic Gait for Bipedal Robots. Proceedings of the 2009 IEEE-RAS Intl. Conf. On Humanoid Robots (Humanoids 2009), Paris(France), 2009, December 7-10. 9-14. |
| [48] | T. Takenaka. The control system for the Honda Humanoid Robot. Published by Oxford University Press on behalf of the British Geriatrics Society. Age and Ageing 2006. 35-S2: ii24-ii26. |
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-Text HTML
Full-Text HTML
 , which is considered as a vector and a function of the joint vector
, which is considered as a vector and a function of the joint vector  The
The  indicates the pose of the humanoid for a certain moment of time in a particular direction while executing a page. If the start and end poses of a single page is indicated as Pi and Pf, a general equation can be formulated as shown in Equation (1) and Equation (2) where
indicates the pose of the humanoid for a certain moment of time in a particular direction while executing a page. If the start and end poses of a single page is indicated as Pi and Pf, a general equation can be formulated as shown in Equation (1) and Equation (2) where  is a set of the joint vectors of ‘i’th pose contingent on the ‘n’ DoF of the system.
is a set of the joint vectors of ‘i’th pose contingent on the ‘n’ DoF of the system. 


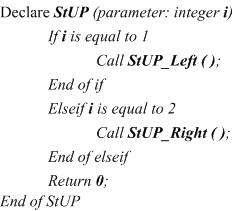
 stands for Step Up vector.
stands for Step Up vector.
 stands for a set of the joint vectors in a certain pose of the system. Figure 3 presents the design of the fifteen poses to perform step up stairs.
stands for a set of the joint vectors in a certain pose of the system. Figure 3 presents the design of the fifteen poses to perform step up stairs.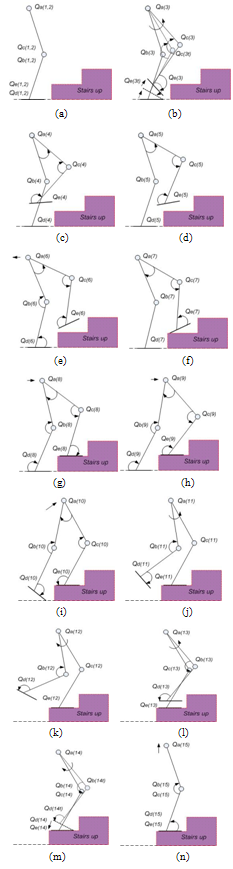
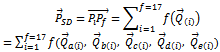
 represents the Step Down Stairs vector as the function of a set,
represents the Step Down Stairs vector as the function of a set,  , of the joint vectors in a certain pose of the gait. The gait may start by activating any of the left or right leg. The functions, StDN_Left ( ) and StDN_Right ( ) is possible to define where the series of poses are executed by the system in a serial manner. Defining the main function for Step Down Stairs as StDN ( ), as presented in Figure 7.
, of the joint vectors in a certain pose of the gait. The gait may start by activating any of the left or right leg. The functions, StDN_Left ( ) and StDN_Right ( ) is possible to define where the series of poses are executed by the system in a serial manner. Defining the main function for Step Down Stairs as StDN ( ), as presented in Figure 7.