-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
International Journal of Traffic and Transportation Engineering
p-ISSN: 2325-0062 e-ISSN: 2325-0070
2025; 14(1): 1-8
doi:10.5923/j.ijtte.20251401.01
Received: Apr. 2, 2025; Accepted: Apr. 26, 2025; Published: May 8, 2025

Density Based Traffic Control System
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLKatongo Nsofwa , Simon Tembo
Department of Electrical and Electronics Engineering, University of Zambia, Lusaka, Zambia
Correspondence to: Katongo Nsofwa , Department of Electrical and Electronics Engineering, University of Zambia, Lusaka, Zambia.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

Traffic congestion at road intersections remains a major challenge in urban transportation systems. Conventional traffic light systems operate on fixed timing strategies, allocating equal green light durations to all lanes irrespective of real-time traffic conditions. This inefficiency results in increased waiting times and traffic bottlenecks. To address this issue, this study employs a Simulation-Based Experimental Design (SBED) to develop and evaluate a density-based traffic control system. The main objectives of this research are to use image processing to detect the density of traffic, to control traffic light timers based on the detected density, and ultimately to reduce wait times at traffic intersections. The proposed system integrates image processing techniques using camera-based detection to assess traffic density dynamically. Based on real-time traffic data, the system categorizes vehicle density into low, medium, and high zones, adjusting signal durations accordingly. Various traffic scenarios were simulated by manipulating parameters such as traffic inflow rates and signal timings. The collected data was analyzed to determine optimal configurations that minimize waiting times and enhance traffic throughput. The findings demonstrate that a density-based adaptive traffic control system significantly outperforms conventional fixed-time systems. By leveraging SBED, the model was iteratively refined to ensure proportional allocation of green light durations based on real-time traffic conditions. The results indicate a substantial reduction in congestion and unnecessary delays, contributing to more efficient urban traffic management.
Keywords: Traffic Density, Adaptive Traffic Control, Image Processing, Urban Traffic Management, Simulation-Based Experimental Design
Cite this paper: Katongo Nsofwa , Simon Tembo , Density Based Traffic Control System, International Journal of Traffic and Transportation Engineering, Vol. 14 No. 1, 2025, pp. 1-8. doi: 10.5923/j.ijtte.20251401.01.
Article Outline
1. Introduction
- Rapid urbanization has led to increased vehicular traffic, resulting in congestion, longer travel times, and elevated pollution levels. Traditional traffic signal systems, which operate on fixed timing schedules, often fail to adapt to real-time traffic conditions, leading to inefficiencies and increased delays. To address these challenges, adaptive traffic control systems that utilize real-time data have been proposed. Among these, image processing techniques have shown promise in assessing traffic density and dynamically adjusting signal timings to optimize traffic flow.A study by Balakrishnan et al. demonstrated the effectiveness of using image processing for real-time traffic density assessment, which led to more efficient traffic signal control [1]. Similarly, Rahman et al. employed YOLOv5 and Non-Maximum Suppression Ensembling for accurate vehicle detection in densely populated traffic environments, enhancing the responsiveness of traffic control systems [2]. These innovations aim to reduce unnecessary waiting times, fuel consumption, and emissions caused by idle vehicles at intersections.Moreover, the integration of intelligent systems such as machine learning and deep learning into traffic control frameworks has further enhanced decision-making in dynamic environments. Kumar et al. proposed a vision-based traffic monitoring system capable of identifying congestion patterns using convolutional neural networks, which significantly improved throughput at major intersections [3]. Other works, like those by Yadav and Sharma, explored the use of IoT and edge computing to gather real-time data and adjust signal phases without relying on centralized infrastructure [4].Despite these advances, challenges remain in terms of scalability, cost-effectiveness, and adaptability to varying traffic patterns. Therefore, continued research is essential to develop more robust and efficient traffic management systems that can adapt to diverse urban settings. A promising approach involves combining simulation-based methods with real-time image analysis to evaluate traffic control strategies under different scenarios, providing a flexible and data-driven foundation for decision-making.The main aim of this study is to employ a Simulation-Based Experimental Design (SBED) to develop and evaluate a density-based traffic control system, to curtail an inefficiency result in increased waiting times and traffic bottlenecks.
1.1. Literature Review
- Various Traffic Systems are used around the world to try and enhance and improve the flow of traffic. These systems are somewhat similar in the sense that they have the same aim of enhancing the flow of traffic, but they also differ in the mechanisms used to control traffic.
1.1.1. History of Traffic Lights
- The concept of traffic control dates back to the 19th century. The first known traffic signal was installed in London in 1868, designed by British railway engineer J.P. Knight. This gas-lit signal featured semaphore arms and was manually operated by police officers to control horse-drawn carriage traffic [5]. However, due to safety concerns, including a gas explosion that injured an officer, the system was short-lived. The evolution of traffic lights continued with the introduction of the first electric traffic signal in Cleveland, Ohio, in 1914. This system used red and green lights and was manually controlled by a police officer [6]. Over time, traffic signals have evolved into sophisticated, automated systems that incorporate sensors and adaptive algorithms to manage traffic flow efficiently.Manual traffic control management involves traffic officers manually directing vehicles at intersections, particularly during events, emergencies, or power outages. This system does not use computational algorithms; instead, decisions are made based on the judgment and experience of the traffic personnel. One of the main advantages of manual control is its flexibility - it can quickly adapt to unique or unforeseen road situations. However, this approach is labor-intensive, inconsistent, and prone to human error or fatigue. Additionally, it poses safety risks to personnel exposed to traffic hazards, and it lacks scalability for large or complex urban traffic networks [7].Traditional fixed-time traffic control systems rely on pre-programmed signal schedules that operate based on historical traffic data rather than real-time conditions. Common algorithms used in such systems include Webster’s method, which calculates optimal cycle lengths and green splits based on average traffic volumes; MAXBAND, which seeks to coordinate green lights along corridors for smoother flow; and TRANSYT, which simulates traffic networks to optimize timings across multiple intersections. While these systems are predictable and simple to implement, their rigidity makes them inefficient under fluctuating traffic conditions. They are unable to adapt dynamically, leading to unnecessary delays and reduced efficiency when actual traffic deviates from historical averages [8], [9].Inductive loop detection-based traffic control systems utilize embedded sensors beneath the road surface to detect vehicle presence and movement. These systems support actuated control methods that adjust signal timings based on the detection of vehicles in specific lanes. Advanced implementations use algorithms such as SCOOT (Split Cycle Offset Optimization Technique), which continuously updates signal timings in response to traffic flow data, and SCATS (Sydney Coordinated Adaptive Traffic System), which dynamically adjusts green time allocations based on demand and traffic conditions across a network. Inductive loop systems improve efficiency and reduce congestion by adapting in real time. However, their limitations include high installation and maintenance costs, as well as susceptibility to damage from road wear and environmental factors [10], [11].
1.1.2. Related Works
- Density-based traffic control systems have gained attention in recent years as an effective solution to manage traffic flow dynamically. These systems adjust traffic signals based on the real-time density of vehicles at intersections, aiming to reduce congestion, minimize delays, and improve overall traffic efficiency. This section reviews several significant works in the field of density-based traffic control systems.In a study by Kumar et al. [12], an adaptive traffic control system was proposed, utilizing sensors to measure traffic density and adjust signal timings accordingly. The system demonstrated a significant reduction in waiting times and improved traffic flow compared to traditional fixed-time signal systems. The researchers employed inductive loop sensors and infrared sensors to detect vehicle presence and calculate density at intersections.Another notable work by Singh et al. [13] introduced a density-based traffic control system using image processing techniques. Cameras were installed at intersections to capture real-time traffic images, which were then processed to determine vehicle count and density. The system dynamically adjusted signal timings based on the processed data, leading to more efficient traffic management and reduced congestion.Gupta et al. [14] explored the use of Internet of Things (IoT) technology in density-based traffic control systems. They integrated IoT-enabled sensors and communication devices to gather real-time traffic data and transmit it to a central processing unit. The system used machine learning algorithms to analyze traffic patterns and predict congestion, enabling proactive adjustments to signal timings. This approach resulted in improved traffic flow and reduced travel time for commuters.An innovative approach by Patil et al. [15] combined the use of radio-frequency identification (RFID) technology and machine learning for traffic density estimation and control. RFID tags were placed on vehicles, and readers were installed at intersections to detect the tags and estimate traffic density. The system employed machine learning models to predict traffic conditions and optimize signal timings, demonstrating a significant reduction in congestion and enhanced traffic management.A recent study by Sharma and Mehta [16] focused on the implementation of a smart traffic control system using wireless sensor networks (WSNs). The system utilized WSNs to collect traffic data and employed fuzzy logic to analyze the data and adjust signal timings dynamically. The results indicated improved traffic flow, reduced waiting times, and lower emissions due to decreased idling at intersections.
2. Methodology
- The simulation-based experimental design (SBED) was used in this study, which aims at using computer simulations to conduct experiments in a controlled virtual environment, where different variables or system parameters are manipulated to observe their effects on a system's behavior. Simulation-based experimental design allows researchers to systematically explore various configurations of a system by designing experiments that optimize the collection of data and the interpretation of results.Simulation-based experimental design employs computational models to emulate real-world systems within a controlled virtual environment, facilitating the testing of multiple scenarios, precise variable manipulation, and data-driven decision-making. The primary steps encompass problem definition, model development, experimental planning, simulation execution, data analysis, optimization, and result reporting [17]. See Figure 1 below for illustration.
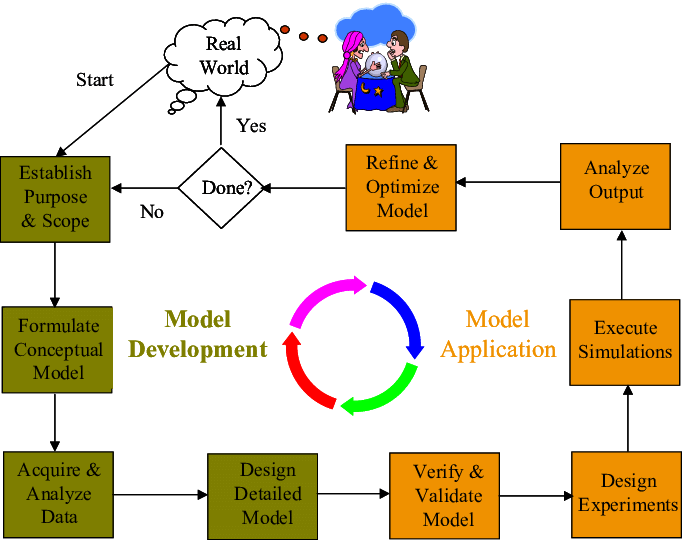 | Figure 1. Simulation-based experimental design modeling process [18] |
2.1. Data Collection
- Effective data collection is crucial for the performance of a density-based traffic control system. The following methods were utilized to gather traffic data:Cameras were deployed at intersections to capture real-time images of traffic flow. These images served as the primary source of data, providing information on the number of vehicles in each lane. Image processing techniques, such as object detection and vehicle counting, were applied using OpenCV and deep learning algorithms like YOLO (You Only Look Once) [19]. This method allowed for non-intrusive data collection, ensuring continuous monitoring without disrupting traffic.Data collected by cameras was processed in real-time by a microprocessor. The microprocessor utilized algorithms to analyze traffic density and compute green light duration based on vehicle count and lane occupancy [20]. This method ensured that traffic signal adjustments were responsive to actual traffic conditions, enhancing efficiency and reducing congestion.The research conducted aimed to enhance traffic signal efficiency and feasibility, ultimately reducing congestion and optimizing time utilization. The developed system operates on a density-based approach, prioritizing specific lanes based on vehicle count. The calculation of green light duration for same-direction lanes follows the formula:
 This formula determines the green light duration at intersections, where the time delay is a fixed value influencing the increase or decrease of green time. Image processing was utilized to assess traffic density, ensuring real-time adaptability to traffic conditions. A simulation environment was developed using Python to evaluate the system’s performance and effectiveness.
This formula determines the green light duration at intersections, where the time delay is a fixed value influencing the increase or decrease of green time. Image processing was utilized to assess traffic density, ensuring real-time adaptability to traffic conditions. A simulation environment was developed using Python to evaluate the system’s performance and effectiveness.3. Results and Discussion
- The results are systematically presented to demonstrate the effectiveness of the developed system in accurately detecting traffic density and adjusting traffic signal timings accordingly. Key performance indicators such as the accuracy of vehicle detection, reduction in wait times, and overall traffic management efficiency are analyzed.In a fixed-time traffic control system, green time is allocated to lanes regardless of vehicle presence, leading to inefficiencies, whereas in a density-based system, green time is dynamically assigned only to lanes with detected vehicles, optimizing traffic flow. The figure below shows the northbound lanes with 7 vehicles detected and 13 seconds allocated, southbound lane with 0 vehicles detected and 0 seconds allocated, eastbound lanes with 15 vehicles detected and 27 seconds allocated and westbound lanes with 11 vehicles detected and 20 seconds allocated, the total number of vehicles detected in all lanes is 33 and the cycle time is 60 seconds.
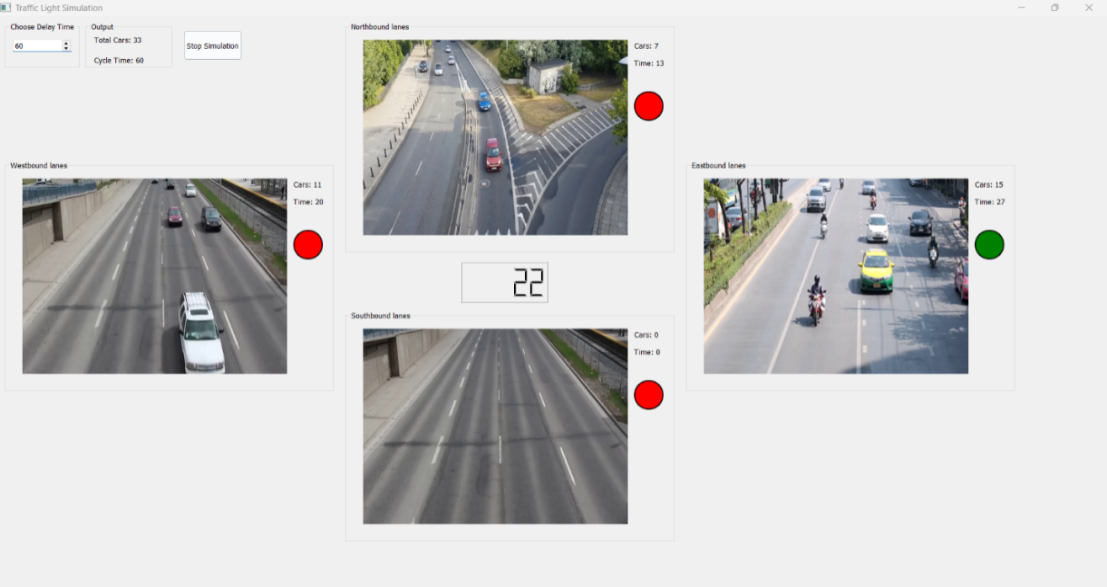 | Figure 2. Shows the allocation of green time based on traffic density |
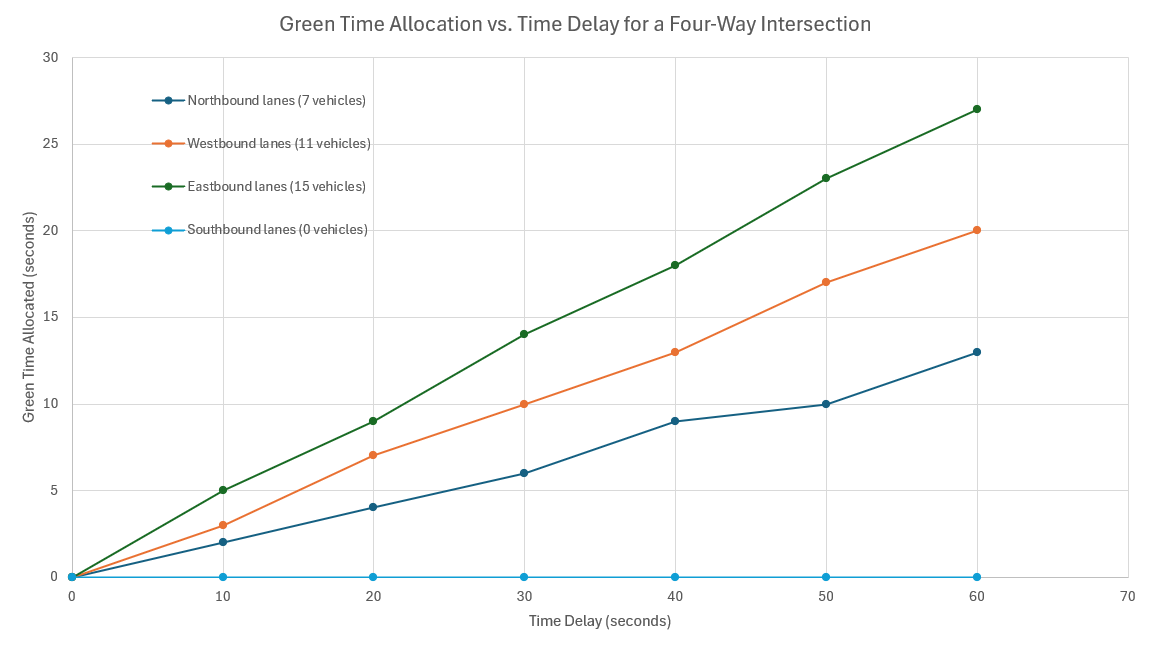 | Figure 3. Green time allocation for different Lanes when vehicles are not detected in some lanes at various time delays |
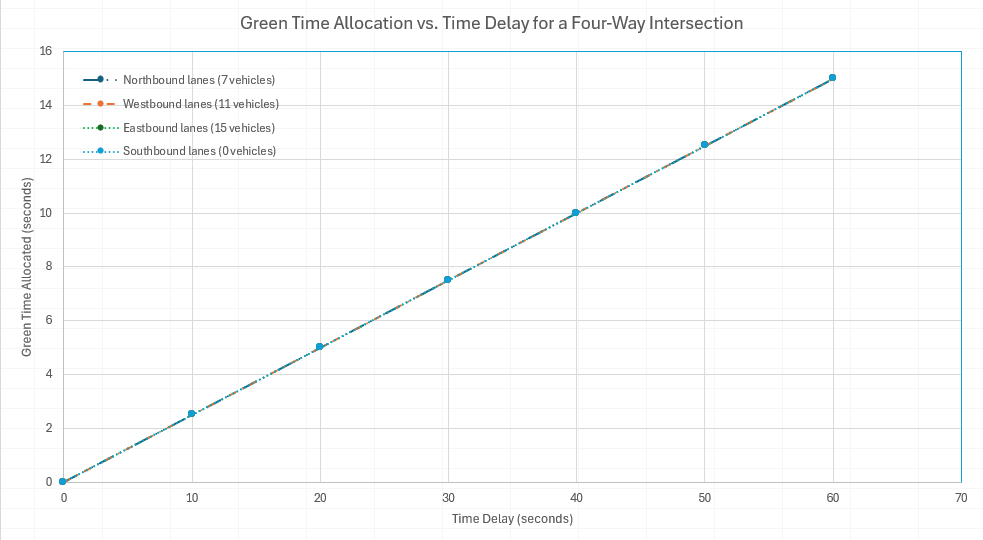 | Figure 4. Green time allocation for traditional fixed-time traffic control systems |
3.1. Analysis on Time delay Variations
- The analysis reveals a significant impact of time delay adjustments on the time allocated to each lane at a four-way intersection. The time delay, which serves as a multiplier in the formula:
 directly influences the duration for which a traffic light remains green for a particular lane. As the time delay increases, the allocated green time for each lane proportionally rises, allowing more vehicles to pass through the intersection. Conversely, a decrease in time delay shortens the green time, causing a quicker turnover between lanes but potentially leading to higher congestion if the traffic density is substantial.
directly influences the duration for which a traffic light remains green for a particular lane. As the time delay increases, the allocated green time for each lane proportionally rises, allowing more vehicles to pass through the intersection. Conversely, a decrease in time delay shortens the green time, causing a quicker turnover between lanes but potentially leading to higher congestion if the traffic density is substantial.3.1.1. Impact of Increasing Time Delay
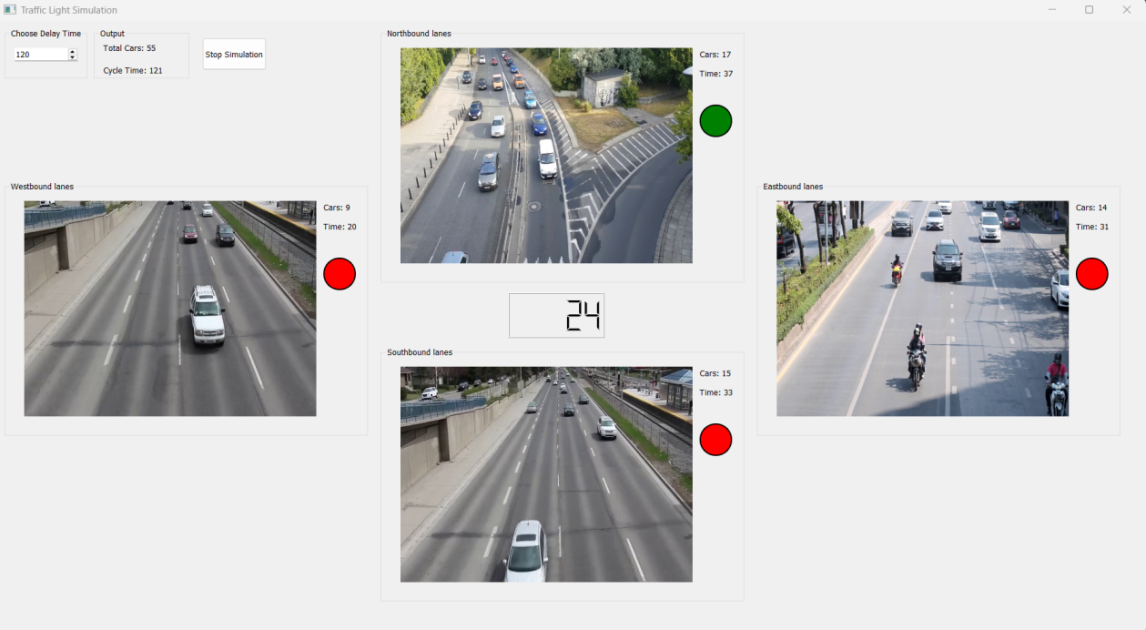
- When the time delay was increased, the green time for each lane expanded, which proved beneficial in scenarios with high traffic density in one or more lanes. This adjustment allowed for smoother traffic flow by reducing wait times for lanes with a higher number of vehicles. However, a higher time delay also resulted in extended wait times for lanes with fewer vehicles, indicating that an excessively high time delay could lead to inefficiencies and underutilization of available traffic time. The figure below shows the northbound lanes with 17 vehicles detected and 37 seconds allocated, southbound lanes with 15 vehicles detected and 33 seconds allocated, eastbound lanes with 14 vehicles detected and 31 seconds allocated and westbound lanes with 9 vehicles detected and 20 seconds allocated, the total number of vehicles detected in all lanes is 55 and the cycle time is 121 seconds.
 | Figure 5. Shows impact of increasing time delay (120 Time delay) |
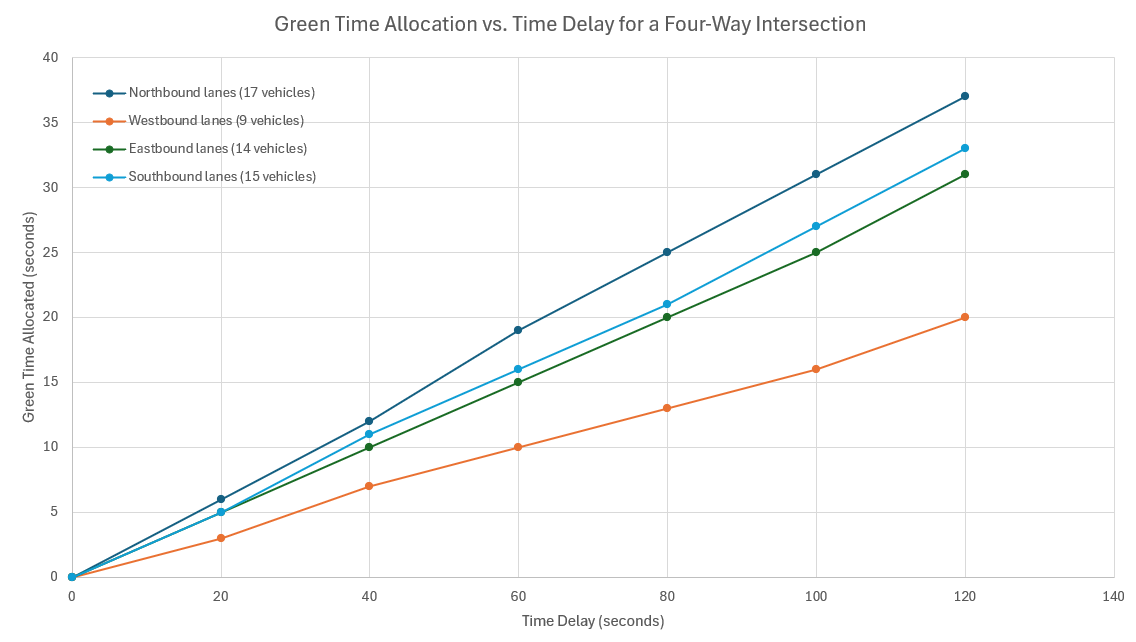 | Figure 6. Green Time Allocation for Different Lanes at Various Time Delays |
3.1.2. Impact of Decreasing Time Delay
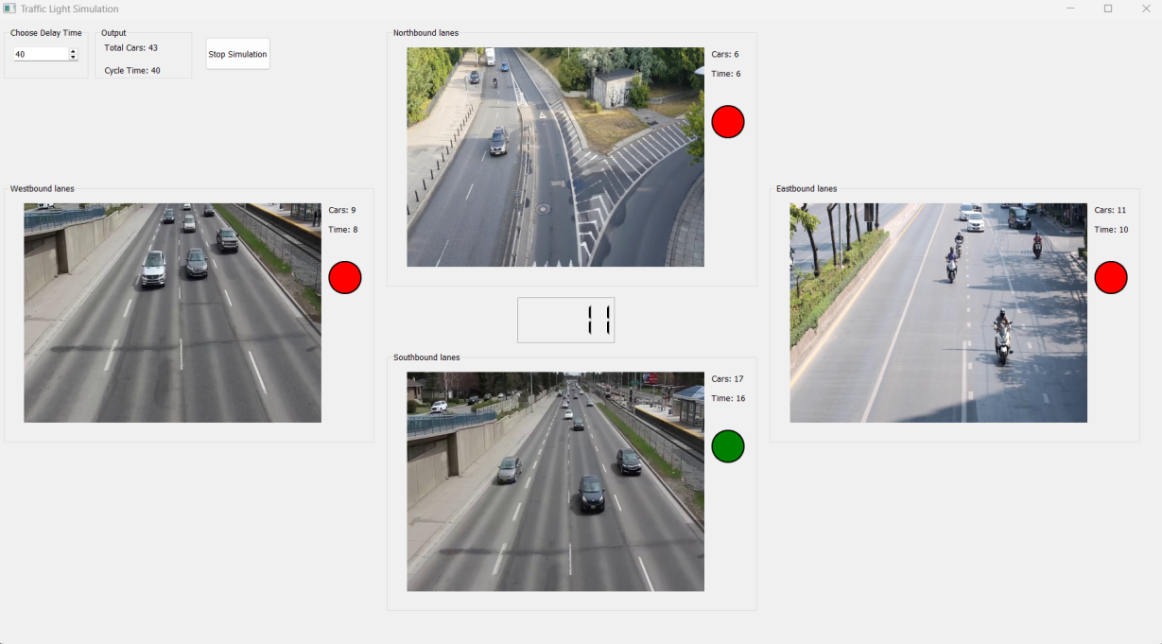
- Reducing the time delay had the opposite effect. It led to shorter green time durations, facilitating more frequent signal changes. This was advantageous for intersections with balanced or low traffic volumes, as it prevented long waits at less crowded lanes. However, in scenarios with uneven traffic distribution, a shorter time delay caused bottlenecks at lanes with higher vehicle counts, increasing overall wait times and reducing throughput efficiency. The figure below shows the northbound lanes with 6 vehicles detected and 6 seconds allocated, southbound lanes with 17 vehicles detected and 16 seconds allocated, eastbound lanes with 11 vehicles detected and 10 seconds allocated and westbound lanes with 9 vehicles detected and 8 seconds allocated, the total number of vehicles detected in all lanes is 43 and the cycle time is 40 seconds.
 | Figure 7. Shows impact of decrease time delay (40 Time delay) |
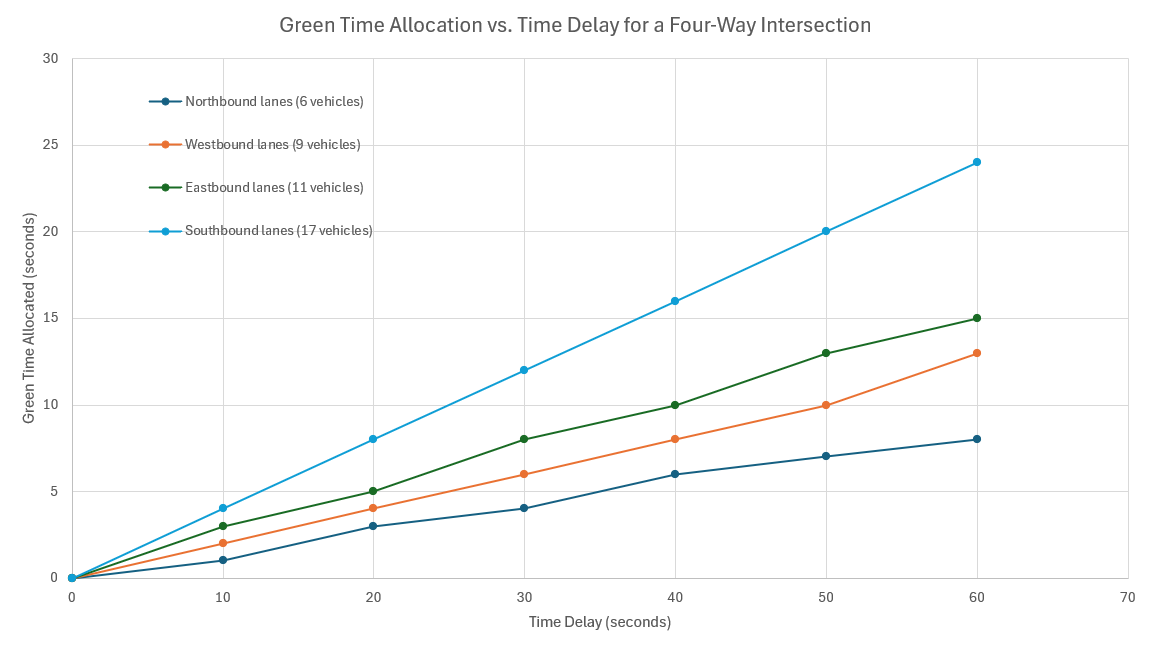 | Figure 8. Impact of Reduced Time Delay on Lane Wait Times |
3.1.3. Optimal Time Delay Consideration
- The results suggest that an optimal time delay value is crucial for maximizing traffic flow efficiency. A balanced approach, where the time delay is adjusted based on real-time traffic density data, could enhance the system's adaptability. Implementing dynamic time delay adjustments, where the delay is proportionally scaled according to traffic conditions detected through image processing, appears to be the most effective strategy for managing traffic at intersections.The findings highlight the importance of calibrating the time delay parameter to align with real-time traffic conditions. A fixed time delay may lead to inefficiencies, whereas a dynamic, density-based approach could significantly improve traffic management outcomes at urban intersections.
3.2. Accuracy of Vehicle Detection
- The accuracy of vehicle detection is crucial for the efficiency of a density-based traffic control system. This study employs a pre-trained YOLO model, a widely recognized real-time object detection algorithm. Although no direct accuracy evaluation was conducted, existing research on YOLO models provides insight into their performance.Different YOLO versions offer varying levels of accuracy and speed. YOLOv3 achieves 55%–65% mAP@0.5 on the COCO dataset [21], while YOLOv4 improves to 65%–75% with better detection in complex scenes [22]. YOLOv5 balances accuracy and speed, achieving 80%–90% mAP@0.5 on vehicle datasets like COCO or custom traffic datasets [23]. The latest versions, YOLOv7 and YOLOv8, reach 90%–95% mAP@0.5 on well-annotated datasets, offering faster processing and improved handling of occlusions [24].Several factors influence YOLO’s accuracy, including lighting conditions, where performance degrades in foggy or nighttime environments [25], occlusions and crowded scenes that reduce detection accuracy [26], camera resolution, where higher resolution improves precision but increases computational cost [27], and the quality of the training dataset, with models trained on COCO or KITTI datasets performing better [28]. Given their high precision and real-time processing capabilities, YOLOv5, YOLOv7, and YOLOv8 are recommended for density-based traffic control systems.
4. Conclusions
- Density-Based Traffic Control System using image processing is a promising step toward smarter and more sustainable urban transportation management, a Density-Based Traffic Control System leverages real-time data obtained from cameras, the system can accurately assess the traffic density at intersections and dynamically adjust traffic signal timings.
4.1. Recommendations
- A Density-Based Traffic Control System utilizing image processing is highly recommended for cities facing increasing traffic congestion. This intelligent system enables real-time adjustments to signal timings based on actual traffic conditions, improving traffic flow, reducing travel times, and minimizing environmental impact from vehicle emissions. Additionally, it supports future urban infrastructure by integrating seamlessly with smart city initiatives and adapting to growing traffic demands. With its precise monitoring and quick response capabilities, this technology enhances the efficiency and sustainability of urban transportation networks.
4.2. Future Work
- The density-based traffic control system successfully performs essential traffic light functions but has potential for further enhancements. Future improvements include integrating IoT for advanced data analytics and incorporating machine learning to enable predictive traffic management, making the system more efficient and adaptive.
ACKNOWLEDGEMENTS
- I would like to acknowledge my supervisor Dr Simon Tembo, who has been an invaluable mentor. His enduring encouragement and practical advice have been an inestimable source of support for me during this process. I would also like to thank all lecturers in the School of Engineering of The University of Zambia for their outstanding support and delivery of knowledge.