-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
International Journal of Traffic and Transportation Engineering
p-ISSN: 2325-0062 e-ISSN: 2325-0070
2015; 4(5): 131-136
doi:10.5923/j.ijtte.20150405.02

Proxy-Lane Algorithm for Lane-Based Models to Simulate Mixed Traffic Flow Conditions
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLChandrasekar Parsuvanathan
Department of Civil Engineering, Velammal Engineering College, Chennai, India
Correspondence to: Chandrasekar Parsuvanathan, Department of Civil Engineering, Velammal Engineering College, Chennai, India.
| Email: |  |
Copyright © 2015 Scientific & Academic Publishing. All Rights Reserved.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

Simulation modelling of road traffic flows had been a proven tool to evaluate the impacts of traffic engineering and management solutions, before such solutions are implemented in field. There are several traffic simulation software programs available in the market. These programs are based on models formulated for lane-based homogeneous traffic conditions that prevail in developed countries. In recent years, there is an increased interest among researchers across the world to model mixed or heterogeneous traffic that prevails in developing countries. In this paper, a new algorithm is proposed to add a unique functionality to lane-based models and enable the latter to model mixed traffic flow conditions. The algorithm is demonstrated for its ability in mimicking mixed flow queue formations as observed in a road section surveyed in the city of Chennai, India.
Keywords: Proxy-Lane algorithm, Simulation modelling, Traffic simulation, Mixed traffic, Heterogeneous traffic
Cite this paper: Chandrasekar Parsuvanathan, Proxy-Lane Algorithm for Lane-Based Models to Simulate Mixed Traffic Flow Conditions, International Journal of Traffic and Transportation Engineering, Vol. 4 No. 5, 2015, pp. 131-136. doi: 10.5923/j.ijtte.20150405.02.
Article Outline
1. Introduction
- Simulation modelling of traffic flow on urban roads had been a proven method for evaluating new strategies related to congestion management. It started with simplified macroscopic treatment of traffic flow of cars on single lane road sections. Traffic flow basic theories were developed as early as eighty years ago [1]. In the past thirty years, models have evolved significantly using ever increasing processor power and graphics capability of personal computers. Sophisticated traffic simulation software packages with 3D animation are now available in the market. Examples are: PARAMICS, VISSIM and AIMSUN [2-4]. They model traffic at microscopic level, focussing on the movement of an individual driver-vehicle unit. Origin-destination vehicular flow demand matrices are inputs for these models while route choice is handled internally. Some programs even treat traffic at what is referred to as nanoscopic level, focussing on travel decisions made by an individual person or trip maker in the simulation environment [5]. Even mode choice is handled by these models with specification of costs of travel as input. However, majority of the simulation models fall under the category of ‘microscopic’ type. In a microscopic simulation setup, network of roads is described in terms of nodes (junctions or key spots along a road) and links (roads or road sections). Selected links or nodes are specified as origins and destinations (while there are also many other ways of specifying where vehicles should start and end their journeys). Demand in terms of vehicular flow is specified between the origins and destinations. Shortest (or even quickest) paths between origins and destinations are calculated by the program as and when required. Path is a series of links for a vehicle to traverse to reach its destination. During every timestep of the simulation, the program updates the position of every vehicle on every link. Three important algorithms are used to update a vehicle’s position. They are namely the car following, lane changing and gap acceptance algorithms. Car following algorithm is used to make decisions related to speed, depending upon the current vehicle’s proximity to the vehicle in front. Lane changing algorithm is used to decide if there is a need to change lane for avoiding a slow moving vehicle in front or to make a turn at the end of the current link. Gap acceptance algorithm is used to assess whether it is safe to initiate a lane changing process and reach an adjacent lane. Models and algorithms discussed so far are based on a common assumption that vehicles adheres to lanes and nature of traffic is homogeneous. It is a condition where majority of vehicles have similar size and speed characteristics. It is also a situation where drivers tend to follow vehicles in front rather than forming haphazard queues. This is common in developed countries. On the contrary, traffic in developing countries is made of a variety of vehicles that significantly vary in static and dynamic characteristics. The traffic situation is so heterogeneous that lane-based models cannot be used to describe it in a realistic way (as they are not meant to describe so). Researchers in India and other developing countries created innovative methods to describe mixed traffic conditions. However, such works focussed on isolated and short road sections only (reviewed in detail in the next section). In this paper, a new algorithm is proposed and tested to model mixed traffic conditions. It is named as proxy-lane algorithm. First, a brief review of mixed or heterogeneous modelling efforts is presented.
2. Literature Review
- The terms ‘mixed traffic’ and ‘heterogeneous traffic’ are often used to mean the same. The intensity of heterogeneity however might vary from a simple combination of cars and cyclists to as complex combination of several slow and fast moving modes as seen in countries like India. Treiber et al extended theoretical speed-flow-density traffic models to include what they called ‘inhomogeneous’ traffic situations [6]. The scope was nevertheless at a macroscopic level.Deo, in her doctoral thesis work focused on modelling heterogeneous traffic movements [7]. This was one of the early works dedicated to heterogeneous traffic in detail. However, the study focussed on western or developed world only (according to author's own words). This fact rules out the possibility of directly applying the algorithms to study traffic situations in developing countries. Huang and Wu proposed an activity-based traveller agent behavioural model for simulating mixed traffic flow [8]. The study focussed on simulation of cyclists’ behaviour at an isolated intersection in Beijing. Luuk Erik in his thesis described how shared space approach could be used to model mixed traffic flow at un-signalized intersections [9]. It was also a study focussing on an isolated intersection. Japanese researchers Shiomi et al attempted to develop a microscopic model for traffic flow with cars and motorcycles as seen in the city of Hanoi, Vietnam [10]. Behaviour of not following lane marking is considered. Discrete choice modelling is applied to model decision making behaviour. The look-ahead distance for a vehicle is limited to the vehicle in front. Vehicle-following behaviour was considered but not the lane-changing behaviour. Hustim and Ramli derived relations for space mean speed analysis of light vehicles and motorcycles in the town of Makassar in Indonesia [11]. This was a macroscopic speed distribution study rather than microscopic a study. Lu et al applied ‘personality trait model’ to model heterogeneous traffic behaviour of road users [12]. Though the title has the phrase ‘heterogeneous’, the article does not reveal much details about the degree of traffic mixture. Psychological factors such as aggressive, egocentric, active, risk-taking, tense and shy behavioural components are included. In India, Arasan and Koshy made early efforts on simulating heterogeneous traffic for the purpose of deriving standards specific to urban roads [13]. Individual vehicle movements were simulated and their positions were determined within a traffic stream (instead of updating vehicles treated as a queue). 2D animation output was provided to visualize traffic flow. Scope of the study was limited to small sections of one-way roads with divided carriage way. Intersections were not covered.A strip-based modelling method was proposed by Mathew et al [14]. The approach is to consider portions of traffic queues instead of regular main lane queues. Lateral movements are modelled to reflect non-lane based movement of vehicles. Other notable works are as follows. Mallikarjuna and Rao developed analytical models pertaining to heterogeneous traffic modelling [15]. Macroscopic simulation was adopted though. Arasan and Dhivya developed a simulation and animation tool for microscopic simulation of heterogeneous traffic at a small scale [16]. Praveen and Arasan investigated how Passenger-Car Unit (PCU) values can be derived in a better way when traffic condition is heterogeneous [17]. Ramadurai and Mohan modelled heterogeneous traffic flow using macroscopic simulation [18]. The methodology was applied and tested for a 0.9km section of road in Chennai. Mullakkal et al modelled motorcycle movements using an innovative method of perception lines (from point of view of drivers modelled) [19]. This is a unique work in the area of two wheeler research but limited to a small section of a straight road. Traffic junctions, curved roads, rider behaviour and pavement conditions are not covered. For most of the works reviewed, the spatial and the temporal scope were limited. Issues at a network level such as shortest paths, signal operations and coordination, flow variations, input and output data management are usually left out of scope. This was the motivation behind adding functionality to an existing full-fledged simulation model so as to mimic mixed traffic situation. In this way, network level issues are by default handled by the simulation program itself.
3. Proxy-Lane Algorithm
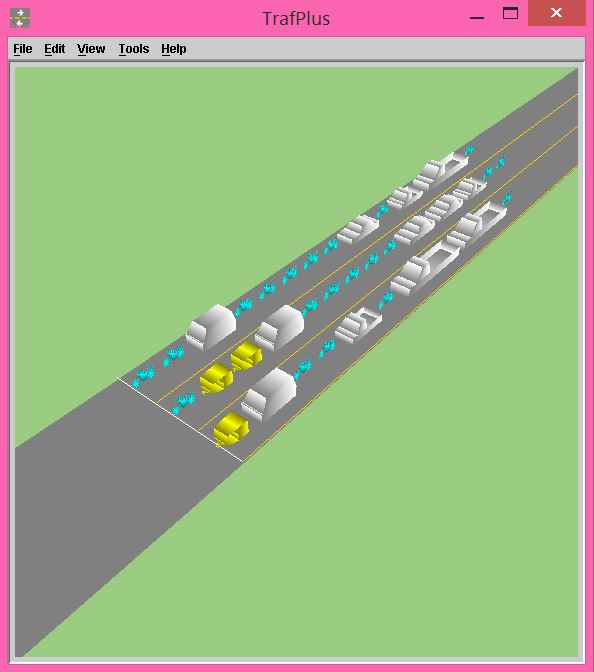
- Simulation programs essentially have a simulation engine that processes vehicle positions every timestep (which is usually set to a value of 0.5 seconds or lower). The engine will process all links, one link at a time (in a usual non-parallel simulation setup). Within a link, it will process all lanes, one lane at a time. Within a lane, it will process every vehicle on the lane, starting from the first vehicle leading a queue (if any).Processing work mainly involves finding the new position or location for the vehicle under consideration. The first vehicle on a lane will have the freedom to proceed without a leader in front. Other vehicles will follow one after another at a safe distance. For the first vehicle, the need for slowing or stopping for a sign, signal or link transfer is checked. For other vehicles, the basic law of car-following is used to find how much movement should be applied for the vehicle. Displacements required in both directions, along and across the road are calculated. Movement across the road will be necessary only when the vehicle is undergoing a lane changing process. The need for lane changing will occur if the vehicle needs to overtake a slow moving vehicle in front or if the vehicle needs to change to an appropriate lane to proceed straight or to turn left or right at the end of the road. As long as there is no need for a lane changing manoeuvre, a vehicle will continue along its lane. If a traditional lane-based homogeneous traffic simulation model (or software) is used to simulate a traffic mix of big and small vehicles, queues will be generated as shown in Figure 1.
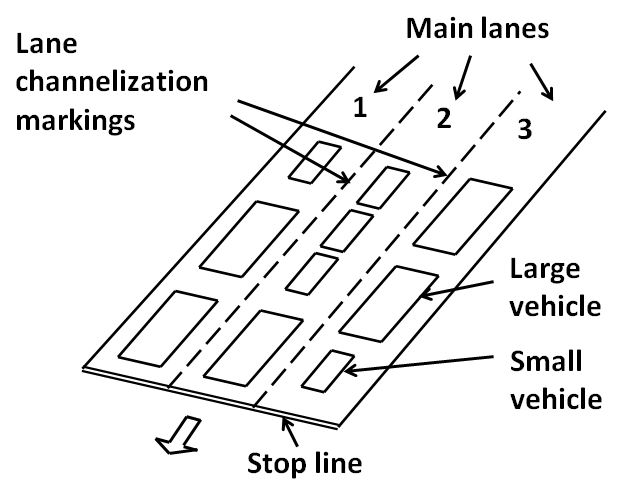 | Figure 1. Lane-based homogeneous model used for mixed traffic |
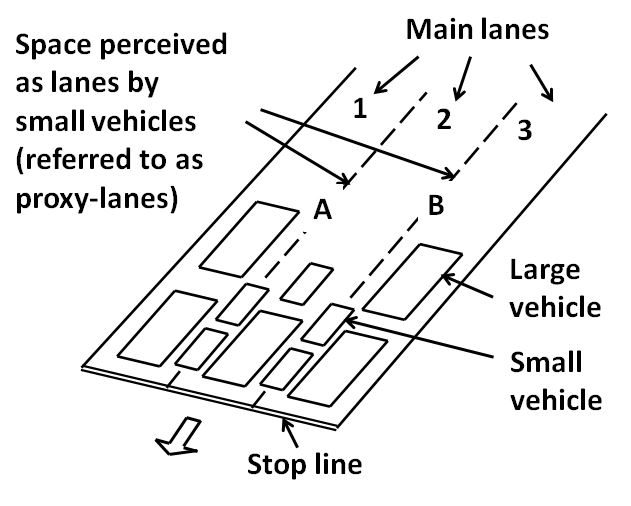 | Figure 2. Proxy-lanes in between main lanes |
4. Use of Proxy-Lane Algorithm
- The main difference expected between using a lane-based model and using the same with addition functionality of proxy-lane algorithm is to find if there is any significant difference in the way queues are formed. The best traffic condition to test will be a level of flow neither too low nor too high. Extremely low flow conditions will not form queues at all. Extremely high flow conditions will affect results by virtue of interactions arising out of congested conditions that are known to be unstable. Therefore, it was decided to model a service level that provides free flow capability for vehicles and yet results in forming of queues if stopped at say, a pedestrian crossing with signal, without any spillbacks at junctions upstream.
4.1. Data Collection
- A three lane road section in the north of Ambattur area in Chennai was chosen to count vehicles and their types during off peak hour just before congestion starts building in the evening on a working day. The mode split is shown in Figure 3. The proportion of two-wheelers is little more than 60%. The area is a sub-urban area accommodating middle income group families mostly. It is reflected in the high proportion of two-wheelers (motorcycles). The modal shares to be used for modes such as cars, motorcycles and autorickshaws (later considered in analysis), will be as follows: 12%, 62% and 4% respectively.Some of the terms used in the Figure 3 are explained. The term auto-rickshaw is a three wheeled intermediate public transport service vehicles operating between passenger specified origins and destinations. Share-autos are other intermediate public transit vehicles that are getting popular in urban areas of Chennai and other cities in India. They are four wheeled van-like vehicles providing transit service on pre-defined routes like buses. However, passengers can board and alight at any spots along the route by hand flagging. Originally it began as shared auto-rickshaws when passengers were willing to share seats and fare for common origins and destinations. Later, dedicated vehicle services began and evolved into what is now still referred to as ‘share-autos’. The category ‘others’ include modes like mini-vans, mini-trucks etc. Cycles refer to non-motorized two-wheelers. They are not modelled since they travelled along kerb side of the road without causing any interference to other traffic when observed in the field.
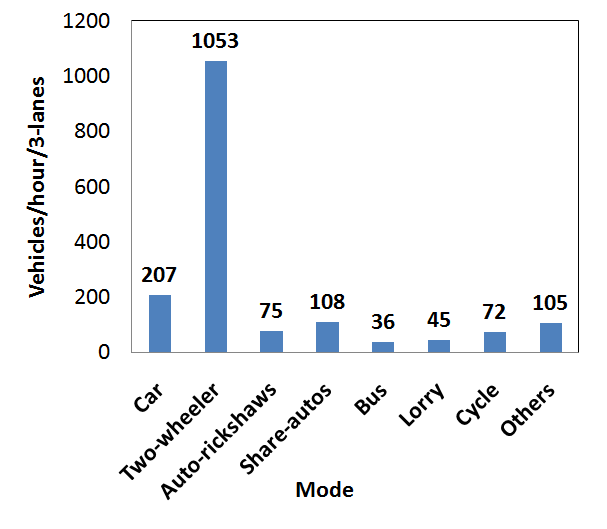 | Figure 3. Mode-wise flow observed in field |
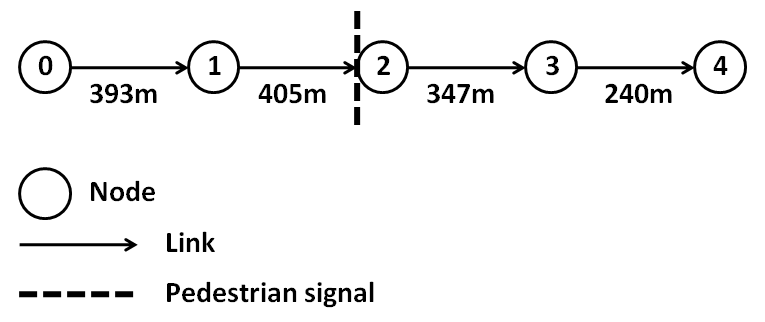 | Figure 4. Node-link diagram for road modelled |
4.2. Queue Formation Analysis
- Snapshots of TrafPlus simulation without and with implementation of proxy-lane algorithm are presented as Figure 5 and Figure 6 respectively. The first scenario is where motorcycles and auto-rickshaws were set to use main lanes only, to mimic a homogeneous lane-based model. The second scenario is where both the modes were set to use any space available between the main lanes, using the proxy-lane algorithm explained earlier. Motorcycles and auto-rickshaws were chosen for this setting as they were the notable modes seen on field often using the space between main lanes.A significant difference in the formation of queues is seen in Figure 6 compared to Figure 5. Motorcycles stay on lanes when no proxy-lane algorithm is implemented (as in Figure 5). With the algorithm in operation, motorcycles occupy the space between main lanes (as in Figure 6). Three lanes roads are perceived as seven lane roads by motorcycles. As such, proxy-lane algorithm packs vehicles into a compact space and hence, queue lengths are shortened for the same number of vehicles.
 | Figure 5. Queue formation before implementing proxy-lane algorithm |
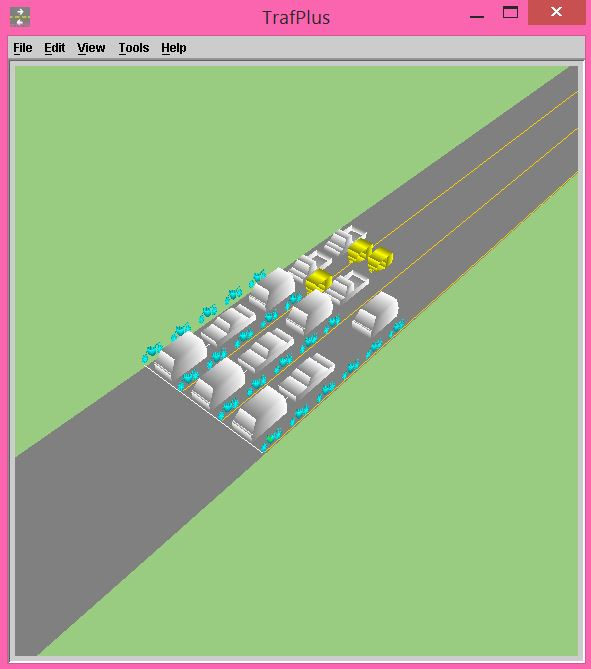 | Figure 6. Queue formation after implementing proxy-lane algorithm |
4.3. Mean Speed Analysis
- From simulation, mean speed values for vehicles travelling on a link with no obstructions were used here for analysis. Link 3-4 in Figure 4 was chosen for this purpose. Mean speed values are presented in Figure 7 for different cases considered for analysis. In Figure 7, each mode has three values of mean speeds: first bar showing data from lane-based simulation, second bar showing data from lane-based simulation with proxy-lane algorithm in operation, and the third bar showing what was observed earlier in field.Motorcycles and autorickshaws were set to follow proxy-lane algorithm, to represent both faster and slower modes that normally do not stay on main lanes. The largest difference in mean speed is seen for motorcycles when compared between before and after implementation of proxy-lane algorithm. This is encouraging because the new value of mean speed (61 km/hr) is closer to field observation (54 km/hr), a notable improvement from the case of lane-based simulation with no proxy-lane consideration (36 km/hr). For auto-rickshaws, queue formations showed visual confirmation of autorickshaws to use proxy-lanes (earlier in Figure 6). However, they do not show a notable change in their mean speed, like motorcycles. This is probably because of their low mode share (which is only 4%).
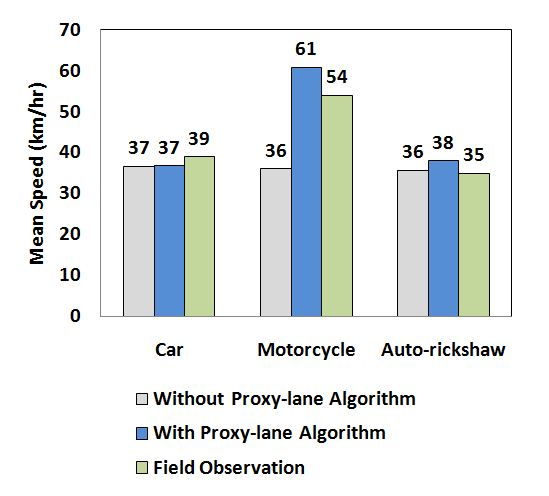 | Figure 7. Mean speed comparison |
4.4. Summary of Analysis
- Significant difference was shown in queue formation when proxy-lane algorithm was applied for selected modes; two-wheelers and three-wheelers. Speed analysis showed that speed measurements for fast moving small vehicles such as motorcycles show significant improvement when proxy-lane algorithm is applied to them. The simulation performed using TrafPlus applies the same car following, lane changing and gap acceptance models as any other lane-based models do. The novelty here is the use of proxy-lane algorithm for vehicles that can accommodate themselves in the space between vehicles on main lanes. The purpose is not to model non-lane based simulation. The purpose is to improve lane-based simulation to reflect a degree of heterogeneity in the traffic being modelled. In the absence of a readily available mixed traffic simulation model, a better representation of mixed traffic is achieved by implementing the proxy-lane algorithm formulated.
5. Conclusions
- Traffic in developing countries is comprised of a high and increasing proportion of two-wheelers like motorcycles and scooters. In city areas, there is predominant movement of three-wheelers too, like auto-rickshaws. This leads to mixed or heterogeneous flow condition. Models developed for lane-based and well-behaved driving conditions will not suit to simulate traffic situations seen in developing countries. Researchers show an increased interest to model vehicle movements in mixed state. Models are reported to have been developed from scratch. However, in this paper, a new algorithm is proposed as an added functionality to existing lane-based models to represent heterogeneity in the traffic conditions modelled. The space between lanes is set to be perceived as additional lanes by vehicle types chosen to perceive so. This space along the road is named as a proxy-lane. Small vehicles in developing countries are seen to occupy such space though it compromises safety regulations. The algorithm is implemented in TrafPlus, originally a lane-based simulation model. TrafPlus is then used to model two scenarios: with and without the implementation of proposed algorithm. Field data collected for a three-lane road section in Chennai (India) is used for this purpose. There is a significant improvement in the representation of mixed traffic condition when using the proxy-lane algorithm, judged by observing the queue formations as well as by comparing motorcycles’ speed values with field observations.
ACKNOWLEDGEMENTS
- Sincere thanks to Elnix Technologies (Chennai) Private Limited, India for providing us with the source code of TrafPlus program and letting us implement the proposed algorithm for testing purposes.