Maciej Rybicki
Sas-Zubrzyckiego 8/27 Kraków, Poland
Correspondence to: Maciej Rybicki, Sas-Zubrzyckiego 8/27 Kraków, Poland.
| Email: |  |
Copyright © 2019 The Author(s). Published by Scientific & Academic Publishing.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

Abstract
A thought experiment concerning specific case of length contraction demonstrates inconsistency of the Special Theory of Relativity (STR). When two extended objects in the mutual relative motion occupy the same area in spacetime (e.g. elevator moving in the elevator shaft; here considered in 2D representation), then Lorentz transformation appears generally unable to handle this situation in a self-consistent way. Namely, transformation from either elevator or shaft rest frames to the observer’s rest frame, non-collinear with the direction of relative motion between the said objects, leads to a contradiction. This happens because the elevator and shaft are subject to the Lorentz length contraction along two different directions in plane, due to different directions of their motion in the observer’s frame. In result, they no longer match each other in this frame. A direct cause of this contradiction is the resulting from the principle of relativity concept of relative motion, regarded as the source of “relativistic” effects. The revealed inconsistency, to which the name “elevator-shaft paradox” is assigned, makes necessary replacing STR by a different theory based on the postulate of preferred frame of reference and the related concepts of absolute rest and absolute motion. The relevant Preferred Frame Theory (PFT) is discussed, with the particular focus on partial experimental equivalence between PFT and STR. The proposed theory predicts an invariant hierarchy of energy, which opens up new prospects for the sought theory of quantum gravity.
Keywords:
Length contraction, Lorentz transformation, Preferred frame of reference, Spacetime, Special relativity, Tangherlini transformation
Cite this paper: Maciej Rybicki, Failure of Special Relativity as a Theory Applied to More Than One of Spatial Dimensions, International Journal of Theoretical and Mathematical Physics, Vol. 9 No. 3, 2019, pp. 81-96. doi: 10.5923/j.ijtmp.20190903.03.
1. Introduction
All the textbooks on Special Relativity are full of rockets, twins, clocks, trains, platforms, etc. This may suggest that STR has been thoroughly verified as a consistent description of the real three-dimensional world with time taken as the fourth dimension. Meanwhile, the more careful insight shows that nearly all the considered cases exploit a single spatial dimension, namely the one parallel to the relative motion between two inertial frames, conventionally identified with x-axis. Even when two spatial dimensions are taken into account (as e.g. in the Sagnac effect), the respective transformations between selected frames are always considered in separation, i.e. as connecting consecutive inertial frames, all linked to the single (curved) course of motion. This general observation applies both to the algebraical description of theory, in particular to Lorentz transformation, and to respective geometrical representation expressed by Minkowski or Loedel spacetime diagrams. In contrast to that, our goal is to examine Special Relativity in application to the “real” two-dimensional case, i.e. the one in which the action takes place so to say simultaneously in two spatial dimensions in xy plane. Anticipating the final result of that examination (which is the fundamental revision of STR, followed by an indication of its due replacement), let us precede the main body of this paper by a brief glance at the origin of Special Relativity and its potential preferred frame alternative.STR arose as a solution to the problem of incompatibility between the Maxwell’s electromagnetic equations and the Newtonian mechanics. Unlike the Newton’s laws of motion, the Maxwell’s equations were found to vary under the Galilean transformation. This suggested existence of a certain ubiquitous medium in which the electromagnetic waves would propagate just as sound in the air. The relevant hypothesis of the motionless luminiferous ether (alternative to the dragged or partly dragged ether hypotheses) meant the split of physical reality into the two separate domains: mechanics - ruled by the Galilean principle of relativity, and electromagnetism - complying with the idea of the preferred frame of reference. However, in a series of experiments conducted by Michelson and Morley no motion of Earth through ether had been detected. This unexpected result led to several new concepts including length contraction and time dilation (“local time”) (FitzGerald [1], Lorentz [2], Larmor [3]), subsequently developed by Lorentz in his theory of electron, also known as Lorentz ether theory (LET) [4]. The failures in detecting absolute motion had been elevated by Poincare [5] to the rank of universal law of nature, called by him the principle of relativity, which paved the way to Special Relativity. In this pivotal moment of physics development, the basic principles once again hang in the balance. The postulated unity of nature (and consequently of physics) required new model of transformation, under which all phenomena would behave uniformly. Logically, the main alternative was: either extension of the Galilean principle of relativity to electrodynamics and other domains, or its opposition, a theory related to the notions of absolute space and absolute motion, with the Galilean relativity “emerging” as an approximation in the limit of small velocities. Each of these options involved different type of transformation and different conversion of Newtonian mechanics to a new adequate form. However, due to specific “state of excitement” featured by the abundance of competitive hypotheses, only the first of mentioned two possibilities had been developed to the stage of complete theory, namely STR. Once it already happened, the “natural selection” did its work eliminating the second option.As shown in Einstein’s seminal paper [6], Lorentz transformation did not need any physical “content” to appear except the two fundamental postulates: the principle of relativity and the constancy (isotropy) of the velocity of light. Due to the radical simplicity of these postulates, STR evinced itself as a “spacetime physics” [7], which means it basically refers to geometry. This became clearly visible owing to Minkowski geometrical interpretation of Special Relativity [8]. The relevant Minkowski spacetime (or space) provides a fusion of the Euclidean three-dimensional space with time interpreted as the fourth dimension of space (with opposite sign) into a single inseparable four-dimensional continuum otherwise called the Lorentzian manifold. An invariant element of Minkowski space is the “spacetime interval” - the Pythagorean-like construct connecting two timelike (i.e. causally connectible) “events” in spacetime, in analogy to distance in Euclidean space obtainable from the Pythagorean theorem. The pseudo-Euclidean geometry of the (flat) “hyperbolic” Minkowski space determines all kinematical properties of any physical object connected with its motion relative to a freely chosen inertial observer. The fact that STR can be interpreted as a purely geometrical model is widely considered to ensure “by definition” its internal coherence. It could be therefore surprising that careful examination of a certain specific class of cases reveals fallacy hidden behind the symmetry. As a result, Special Relativity, along with Minkowski space, turns out to be an inadequate description of nature. Although quoting Einstein against himself may seem a bit unfair; yet his ingenious remark perfectly matches this case: “As far as the laws of mathematics refer to reality, they are not certain, and as far as they are certain, they do not refer to reality” [9]. Part I includes a thought experiment demonstrating the STR inconsistency as a theory applied to more than one of spatial dimensions. Instead, in Part II we outline a theory alternative to STR (the second option, mentioned above), mathematically consistent, compatible with all known experiments and predicting new subtle effects so far undiscovered.
2. Part I
An evidence of the geometrical inconsistency of Special Relativity1. Description of the elevator-shaft thought-experiment and its preliminary analysis In the following reasoning we shall strictly adhere to the STR rules implemented to 3-dimensional spacetime ct, x, y (all the time z = 0). Assume the 2D “elevator” moving uniformly, say, upward, with the relativistic velocity V relative to the 2D vertical elevator shaft, hereinafter referred to as “rails”. Let  be the rest frame for the elevator, and
be the rest frame for the elevator, and  the rest frame for the rails. To get a better insight, assume that in
the rest frame for the rails. To get a better insight, assume that in  the elevator is square shaped. The spacing between the rails is assumed to be equal to the width of elevator, while the rails length is treated as infinite. In
the elevator is square shaped. The spacing between the rails is assumed to be equal to the width of elevator, while the rails length is treated as infinite. In  the moving elevator is contracted by the Lorentz factor
the moving elevator is contracted by the Lorentz factor  from square to the horizontal rectangle (Fig. 1).
from square to the horizontal rectangle (Fig. 1). 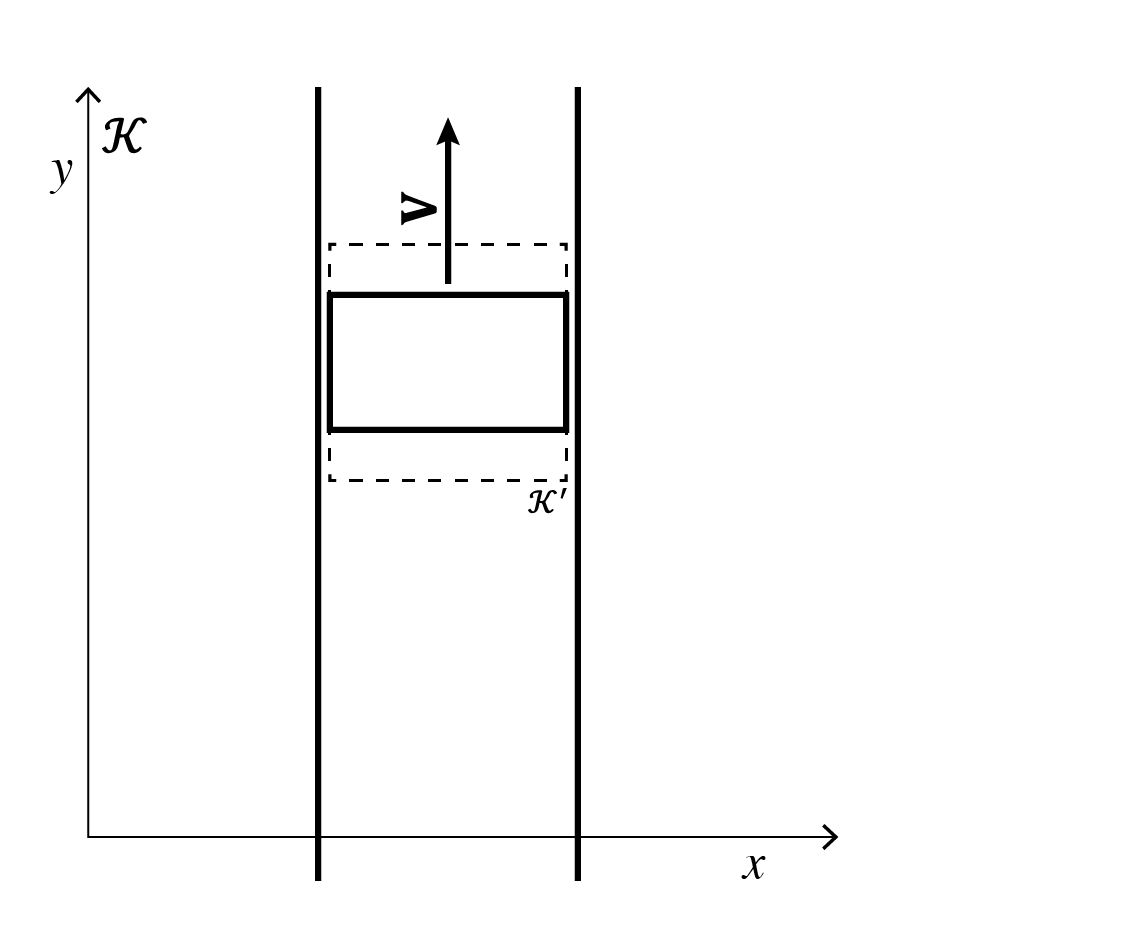 | Figure 1. Elevator moving upwards in  becomes contracted by the Lorentz factor becomes contracted by the Lorentz factor  , from the square to rectangle. The dashed line depicts the square shape of elevator in its rest frame , from the square to rectangle. The dashed line depicts the square shape of elevator in its rest frame  . Both in frames . Both in frames  and and  elevator tightly adheres to the rails elevator tightly adheres to the rails |
Assume that rails are divided into the square “cages” identified with sequential floors. The relationship between the height of elevator and the height of any particular cage would then correspond to the relationship between the pole and the barn in the pole-in-barn paradox. Namely, in frame  the moving upwards elevator is shorter in height compared with any sequential cage passed by, whereas in frame
the moving upwards elevator is shorter in height compared with any sequential cage passed by, whereas in frame  each moving downwards cage is shorter in height than the elevator. As is known, Special Relativity provides consistent explanation to this apparent paradox, based on the relativity of simultaneity. However, we aim to consider here a different problem. To formulate it, let us assume that elevator and rails are observed from the train moving relative to
each moving downwards cage is shorter in height than the elevator. As is known, Special Relativity provides consistent explanation to this apparent paradox, based on the relativity of simultaneity. However, we aim to consider here a different problem. To formulate it, let us assume that elevator and rails are observed from the train moving relative to  with the relativistic velocity u in x positive direction. Let
with the relativistic velocity u in x positive direction. Let  be the rest frame for the train observer (Fig. 2).
be the rest frame for the train observer (Fig. 2).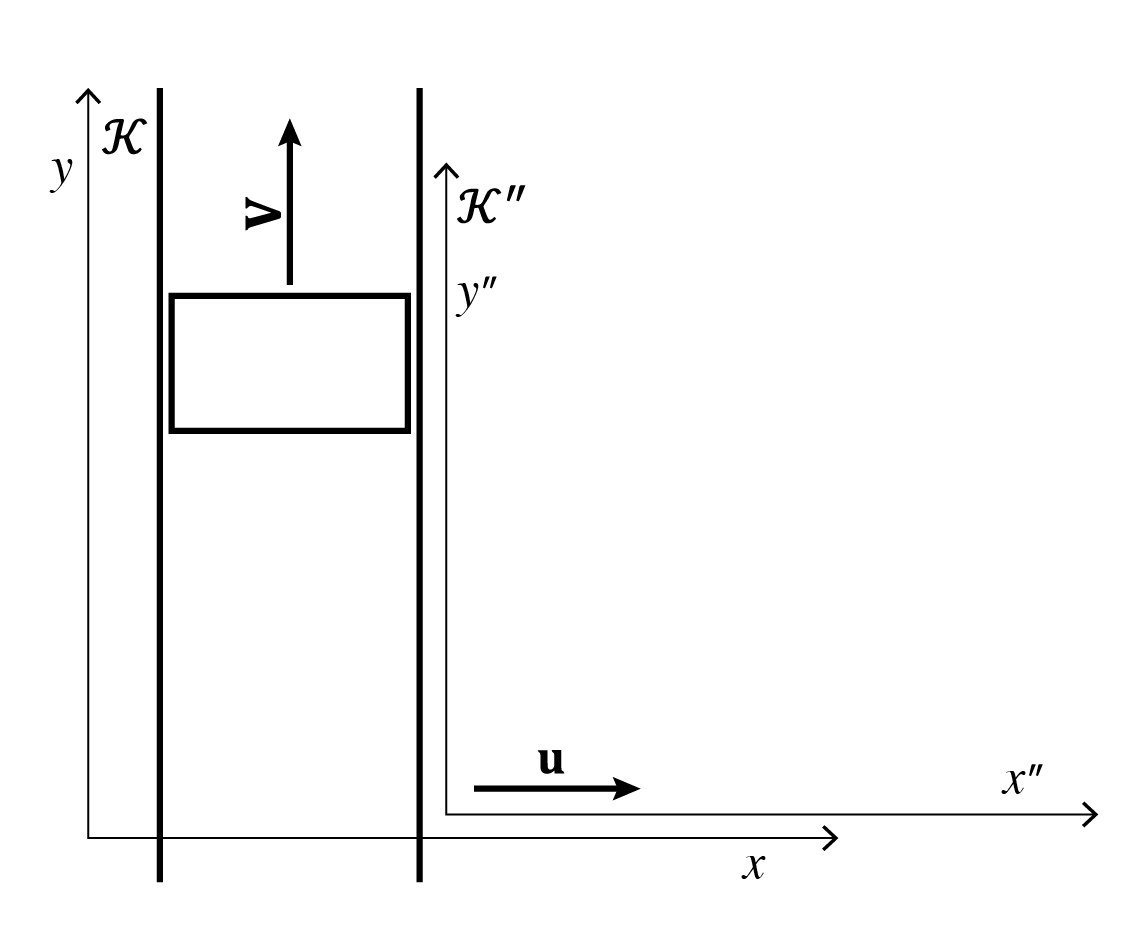 | Figure 2. The rails at rest in frame  , elevator (at rest in , elevator (at rest in  ) moving uniformly upwards, and the train-frame ) moving uniformly upwards, and the train-frame  moving uniformly to the right; all three as observed from the rail-frame moving uniformly to the right; all three as observed from the rail-frame  |
As far as the train ( ) moves to the right relative to vertical rails (
) moves to the right relative to vertical rails ( ), the rails move to the left relative to
), the rails move to the left relative to  with the velocity
with the velocity  (or u, provided we revert the sense of
(or u, provided we revert the sense of  -axes). Same as in
-axes). Same as in  , the vector u is perpendicular to the rails in
, the vector u is perpendicular to the rails in  . Consequently, the rails described as “vertical” in
. Consequently, the rails described as “vertical” in  (parallel to y-axis) are, regardless of their motion, also vertical in
(parallel to y-axis) are, regardless of their motion, also vertical in  (parallel to
(parallel to  -axis). Compared with respective spacing in
-axis). Compared with respective spacing in  , in
, in  the rails get closer to each other due to the length contraction by the Lorentz factor
the rails get closer to each other due to the length contraction by the Lorentz factor  (Fig. 3).
(Fig. 3).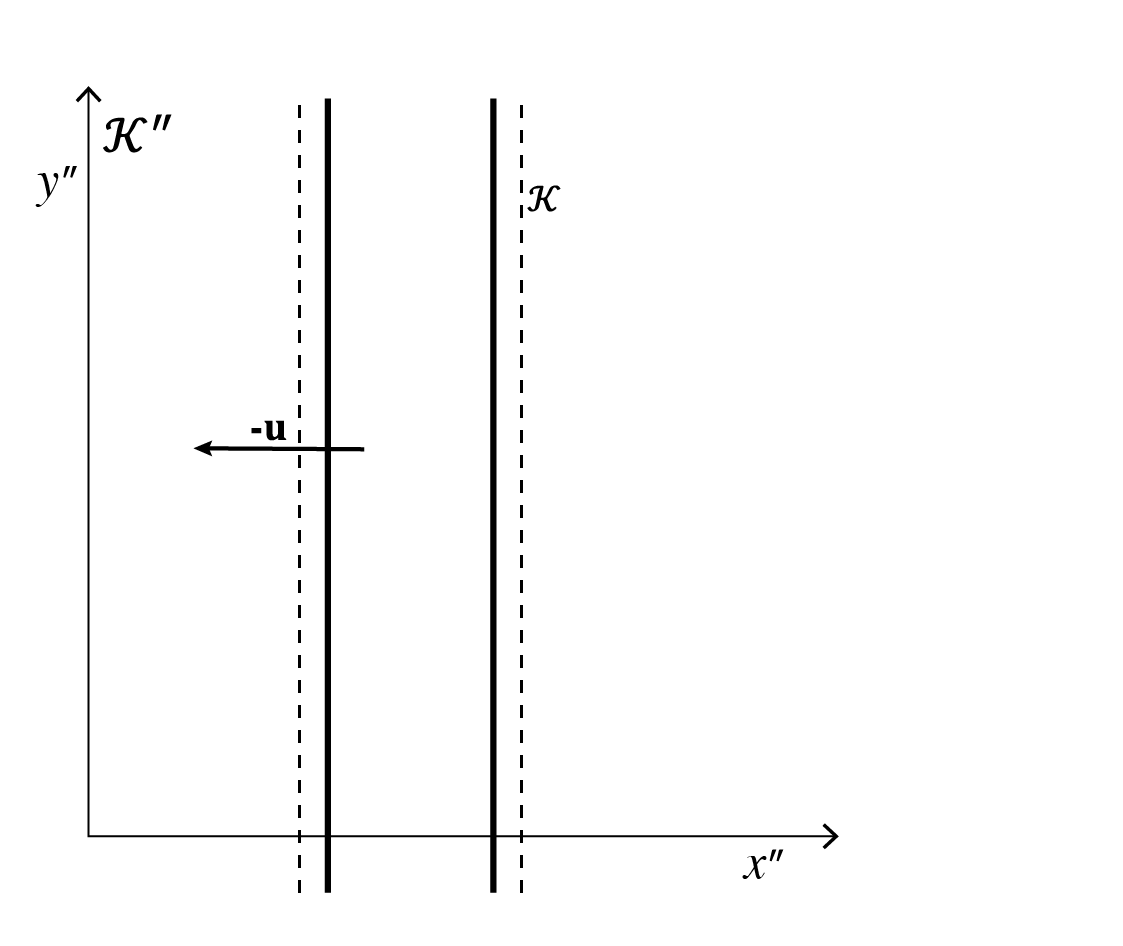 | Figure 3. The rails contracted in frame  . The dashed lines show the respective spacing in frame . The dashed lines show the respective spacing in frame  |
In turn, the elevator travels in  with the velocity
with the velocity  along the diagonal direction in
along the diagonal direction in  plane, from bottom right to top left. Both the exact value and the direction of vector
plane, from bottom right to top left. Both the exact value and the direction of vector  follow from the STR velocity addition in the general configuration:
follow from the STR velocity addition in the general configuration: 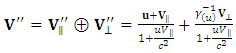 | (1) |
where  and
and  are, respectively, the parallel
are, respectively, the parallel  and perpendicular
and perpendicular  components of
components of  , and
, and  and
and  are, respectively, x and y components of V. Since in
are, respectively, x and y components of V. Since in  the elevator travels in y direction, so respective components are:
the elevator travels in y direction, so respective components are:  and
and  . Consequently Eq. (1) reduces to:
. Consequently Eq. (1) reduces to: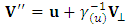 | (2) |
It follows that the elevator moves in  in the direction determined by the components:
in the direction determined by the components:  and
and  , with the value of
, with the value of  being:
being: 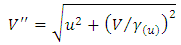 | (3) |
In any case different from  , and/or
, and/or  , the elevator is contracted in
, the elevator is contracted in  by the Lorentz factor
by the Lorentz factor  in the direction diagonal to both of its horizontal and vertical sides. Hence, all four sides are tilted towards the direction transverse to vector
in the direction diagonal to both of its horizontal and vertical sides. Hence, all four sides are tilted towards the direction transverse to vector  . In result, the elevator reshapes in
. In result, the elevator reshapes in  from the square to the rhomboid, with all its sides diagonal in
from the square to the rhomboid, with all its sides diagonal in  plane (Fig. 4).
plane (Fig. 4). | Figure 4. Elevator observed in frame  . Due to the length contraction, the elevator reshapes from the square to rhomboid. Both horizontal and vertical sides are skewed in . Due to the length contraction, the elevator reshapes from the square to rhomboid. Both horizontal and vertical sides are skewed in  |
It turns out that, in  , the rhomboidal shape of elevator does not match the vertical direction of the rails. Unlike the pole-in-barn paradox in which time variables play crucial role (in rebutting this paradox), the revealed incompatibility cannot be solved by applying the relativity of simultaneity. Likewise, but this time in agreement with expectation, the mismatching does not depend on whether the coordinate systems
, the rhomboidal shape of elevator does not match the vertical direction of the rails. Unlike the pole-in-barn paradox in which time variables play crucial role (in rebutting this paradox), the revealed incompatibility cannot be solved by applying the relativity of simultaneity. Likewise, but this time in agreement with expectation, the mismatching does not depend on whether the coordinate systems  and
and  are collinear or not. This prediction remains in conflict with the respective compatibility in frames
are collinear or not. This prediction remains in conflict with the respective compatibility in frames  and
and  , which eventually indicates an inconsistency of STR (Fig. 5).
, which eventually indicates an inconsistency of STR (Fig. 5). | Figure 5. Square elevator contracted along the diagonal direction and vertical rails contracted along the horizontal direction do not match each other in the frame  . This contradicts respective fit in frames . This contradicts respective fit in frames  and and  |
Let us consider now a simplified version of the above experiment, reduced to the basically one-dimensional objects embedded in the 3D spacetime. Let only one rail be left (we shall call it “pipe”), as well as only one vertical side of the elevator (we shall call it “rod”). Beside this difference (in fact coming down to assumption that elevator and shaft are both infinitely thin), the whole previous arrangement remains unchanged (Fig. 6). 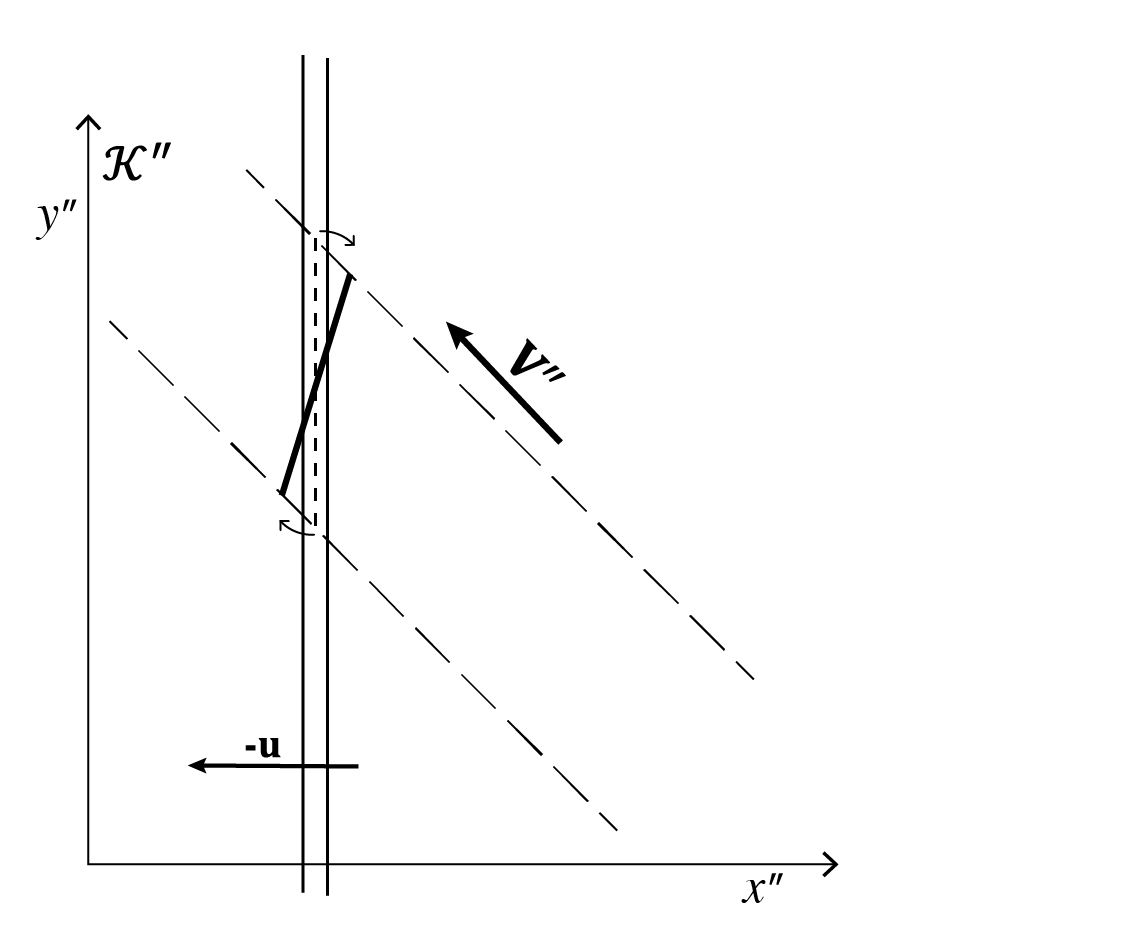 | Figure 6. The rod sliding in the vertical pipe at rest in  , observed in frame , observed in frame  . Due to the diagonal direction of contraction in . Due to the diagonal direction of contraction in  the rod deviates from vertical direction, hence can no longer slide inside the pipe the rod deviates from vertical direction, hence can no longer slide inside the pipe |
In frame  , considering respective shapes, the pipe moves perpendicularly to vector
, considering respective shapes, the pipe moves perpendicularly to vector  , while the rod moves diagonally to vector
, while the rod moves diagonally to vector  . Due to the length contraction along vector
. Due to the length contraction along vector  the rod skews in
the rod skews in  towards the transverse direction to this vector. This is an obvious geometrical consequence of length contraction, considering e.g. how does behave the diagonal of the rectangle contracted along its sides. Hence, in result of contraction in
towards the transverse direction to this vector. This is an obvious geometrical consequence of length contraction, considering e.g. how does behave the diagonal of the rectangle contracted along its sides. Hence, in result of contraction in  , the direction of rod differs from the direction of pipe that itself remains vertical. Consequently, according to observer
, the direction of rod differs from the direction of pipe that itself remains vertical. Consequently, according to observer  , the rod and pipe do not match each other, so that the rod can no longer slide inside the pipe. This ridiculous prediction is at odds with the perfect fit in frames
, the rod and pipe do not match each other, so that the rod can no longer slide inside the pipe. This ridiculous prediction is at odds with the perfect fit in frames  and
and  , hence, as previously, indicates an inconsistency of STR. Concluding, the reasoning contained in this section, if thoroughly considered, provides a wholly adequate evidence of the inconsistency of Special Relativity. Nevertheless, the two counter-arguments have been presented to the author in response to the “working” version of the present paper; the one in private correspondence [10] and the other one [11] aimed at justifying the rejection of the submitted manuscript. Regardless of the fundamental disagreement with these arguments, the author is truly grateful to both prominent proponents of Einstein’s theory for their stimulating contribution in improving this paper. All the more so that typical reaction in this case is no reaction. In short, these two counter-arguments are, respectively, the following: 1) Elevator cannot match the rails in one frame and not match in the other one. Lorentz transformation certainly cannot lead to such nonsensical result. In particular, a single spacetime point in one frame cannot split into the two separate points in another frame; 2) The composition of two non-collinear Lorentz boosts does not give a pure Lorentz boost along the resultant velocity, but Lorentz boost and rotation. It is this rotation that matches the contracted elevator to the rails in observer’s frame. The following two sections are devoted to the analysis of these arguments. We shall consider them separately, although it is clear that they interconnect with each other to a certain degree. In particular, the second argument might be regarded as validating the first one.2. Argument from the “singleness” of four-position of adjacent pointsThe argument proceeds as follows. In accordance with the previous arrangement, consider the Lorentz transformation from
, hence, as previously, indicates an inconsistency of STR. Concluding, the reasoning contained in this section, if thoroughly considered, provides a wholly adequate evidence of the inconsistency of Special Relativity. Nevertheless, the two counter-arguments have been presented to the author in response to the “working” version of the present paper; the one in private correspondence [10] and the other one [11] aimed at justifying the rejection of the submitted manuscript. Regardless of the fundamental disagreement with these arguments, the author is truly grateful to both prominent proponents of Einstein’s theory for their stimulating contribution in improving this paper. All the more so that typical reaction in this case is no reaction. In short, these two counter-arguments are, respectively, the following: 1) Elevator cannot match the rails in one frame and not match in the other one. Lorentz transformation certainly cannot lead to such nonsensical result. In particular, a single spacetime point in one frame cannot split into the two separate points in another frame; 2) The composition of two non-collinear Lorentz boosts does not give a pure Lorentz boost along the resultant velocity, but Lorentz boost and rotation. It is this rotation that matches the contracted elevator to the rails in observer’s frame. The following two sections are devoted to the analysis of these arguments. We shall consider them separately, although it is clear that they interconnect with each other to a certain degree. In particular, the second argument might be regarded as validating the first one.2. Argument from the “singleness” of four-position of adjacent pointsThe argument proceeds as follows. In accordance with the previous arrangement, consider the Lorentz transformation from  to
to  of the spacetime coordinates of elevator four vertices (which suffices to transform the whole object). In frame
of the spacetime coordinates of elevator four vertices (which suffices to transform the whole object). In frame  these vertices are constantly in contact with the rails. Hence, in any particular instant determined in
these vertices are constantly in contact with the rails. Hence, in any particular instant determined in  , each vertex comes into contact with a certain point on the rail. In terms of Minkowski geometry, this means that both adjacent points (vertex and rail-point) constitute a single point (event) in spacetime, represented by a single position 4-vector (four-position), specified by the single set of space and time coordinates (despite considering the 2D space, we shall stick to the established nomenclature). Let us call the so-defined spacetime point the “composite point”. Each “composite point” in
, each vertex comes into contact with a certain point on the rail. In terms of Minkowski geometry, this means that both adjacent points (vertex and rail-point) constitute a single point (event) in spacetime, represented by a single position 4-vector (four-position), specified by the single set of space and time coordinates (despite considering the 2D space, we shall stick to the established nomenclature). Let us call the so-defined spacetime point the “composite point”. Each “composite point” in  , represented by respective four-position, after being transformed to
, represented by respective four-position, after being transformed to  makes also a single “composite point” represented by the new four-position, which can be written as:
makes also a single “composite point” represented by the new four-position, which can be written as:  . The resultant shape of elevator obtained by transforming the four-positions of all vertices from
. The resultant shape of elevator obtained by transforming the four-positions of all vertices from  to
to  must therefore comply with the shape (direction and spacing) of the rails. Consequently, the elevator contracted in
must therefore comply with the shape (direction and spacing) of the rails. Consequently, the elevator contracted in  must adhere to the rails with both of its side-edges, just as it does in
must adhere to the rails with both of its side-edges, just as it does in  . There is only “floor” and “ceiling” that are skewed at an equal angle in result of length contraction. This distortion is a direct consequence of the relativity of simultaneity, manifesting itself as the difference in determining the simultaneity of distanced events in
. There is only “floor” and “ceiling” that are skewed at an equal angle in result of length contraction. This distortion is a direct consequence of the relativity of simultaneity, manifesting itself as the difference in determining the simultaneity of distanced events in  and
and  along the
along the  direction. Similarly, transformation from
direction. Similarly, transformation from  to
to  , specified as
, specified as 
 must also preserve the singleness of respective “composite points”.Let us recap: the elevator indeed reshapes in
must also preserve the singleness of respective “composite points”.Let us recap: the elevator indeed reshapes in  from the square to rhomboid due to the diagonal direction of length contraction in
from the square to rhomboid due to the diagonal direction of length contraction in  plane; nevertheless, its vertical (in
plane; nevertheless, its vertical (in  and in
and in  ) side-edges remain vertical in
) side-edges remain vertical in  . In that way, the singleness of the four-positions of respective “composite points” is preserved.The above argument seems to be conclusive by the strength of pure logic rather than by the rules specific to Special Relativity. Beyond any doubt, the property of “contacting” cannot be frame-dependent. A single set of spacetime coordinates cannot split into the two separated sets of coordinates (one for the vertex and one for the rail-point) in result of the Lorentz (or any other) transformation from one frame to another. This is a “mathematically trivial fact”, while its negation is “really absurd” [10]. In reply to this argument, we shall also use logic rather than physics. Let us call, just for our present purpose, the above-mentioned property of Lorentz transformation the “conservation of the singleness of four-position”. The respective demand is indeed trivial and obvious. The point is, however, that along with this one, another demand should also be made and fulfilled. Namely, the right transformation must give (predict) the correct length contraction. Note that unlike the “ordinary” point, i.e. the one fixed to a single object, e.g. elevator or rail as taken separately, each “composite point” here considered does not trace out a single trajectory (worldline) in spacetime. This is because any particular “composite point”, although defined by a single position 4-vector, is however represented by two different velocity 4-vectors. In frame
. In that way, the singleness of the four-positions of respective “composite points” is preserved.The above argument seems to be conclusive by the strength of pure logic rather than by the rules specific to Special Relativity. Beyond any doubt, the property of “contacting” cannot be frame-dependent. A single set of spacetime coordinates cannot split into the two separated sets of coordinates (one for the vertex and one for the rail-point) in result of the Lorentz (or any other) transformation from one frame to another. This is a “mathematically trivial fact”, while its negation is “really absurd” [10]. In reply to this argument, we shall also use logic rather than physics. Let us call, just for our present purpose, the above-mentioned property of Lorentz transformation the “conservation of the singleness of four-position”. The respective demand is indeed trivial and obvious. The point is, however, that along with this one, another demand should also be made and fulfilled. Namely, the right transformation must give (predict) the correct length contraction. Note that unlike the “ordinary” point, i.e. the one fixed to a single object, e.g. elevator or rail as taken separately, each “composite point” here considered does not trace out a single trajectory (worldline) in spacetime. This is because any particular “composite point”, although defined by a single position 4-vector, is however represented by two different velocity 4-vectors. In frame  these vectors are different both as to the value and the direction. This fact determines the way that “composite object” (i.e. the one formed in
these vectors are different both as to the value and the direction. This fact determines the way that “composite object” (i.e. the one formed in  by the set of four “composite points”) is contracted in
by the set of four “composite points”) is contracted in  . According to STR, contraction always takes place along the direction of relative motion, hence along respective relative velocity vector. In the here considered case, this means that rails are transformed from
. According to STR, contraction always takes place along the direction of relative motion, hence along respective relative velocity vector. In the here considered case, this means that rails are transformed from  to
to  along vector u; instead, the elevator is transformed from
along vector u; instead, the elevator is transformed from  to
to  along vector
along vector  . These two different directions of motion in one reference frame (
. These two different directions of motion in one reference frame ( plane), applied to the Lorentz transformation of any single “composite point” determine two different directions along which the said objects are contracted. As a result, we obtain an apparent split of particular “composite points” followed by the resultant decoherence of shapes (despite their compatibility in
plane), applied to the Lorentz transformation of any single “composite point” determine two different directions along which the said objects are contracted. As a result, we obtain an apparent split of particular “composite points” followed by the resultant decoherence of shapes (despite their compatibility in  and
and  , elevator and rails no longer match each other in
, elevator and rails no longer match each other in  ). An alternative to this, from somewhere else nonsensical result, is preserving (in one way or another) the singleness of four-positions to satisfy the demand of logic, which is however achieved at the expense of breaking the rules of length contraction. Let us recap this section. Provided that elevator and rails match each other in the elevator frame and in the rails frame, they must also match each other in any other frame. The property of contacting, connected with the demand of the singleness of four-positions, cannot be frame-depended. Indeed, it must be not, and really, it is not! However, this is an argument from nature, not from theory. Nature is always internally coherent, or self-consistent, but its description (theory) does not automatically possess this vital property. What we really claim in our rebuttal is not denying the “conservation of the singleness of four-position”, but denying the ability of Lorentz transformation to fulfil both demands together, i.e. to predict the correct length contraction and to preserve the integrity of “composite points” due to the “singleness” of four-positions. The right theory should certainly satisfy both demands, namely preserve the singleness of four-positions in transformations and predict the correct length contraction. However, as crazy as it sounds, STR fails in this regard.3. Argument from the Thomas-Wigner rotationA specific prediction connected with STR states that composition of two (or more) non-collinear Lorentz boosts does not give a pure Lorentz boost along the final velocity as observed in the observer’s (initial) frame, but a composition of Lorentz boost and rotation, known as the Thomas-Wigner rotation (TWR). In the case of orbital motion, we deal with the sequence of (infinitesimal) TWRs, resulting in a periodic change of the spatial orientation of orbiting object, known as Thomas precession (TP) [12]. This effect explains the otherwise unexplainable observation in quantum physics, namely relativistic correction to the spin-orbit interaction. A typical example is the precession of spin of electron orbiting around the nucleus. Within STR, Thomas precession is a direct consequence of the relativity of simultaneity associated with each participating TWR. As a result, TP is absent in cases when direction of spin is perpendicular to the plane of rotation, i.e. parallel to y-axis (see e.g. comprehensive explanation by Taylor & Wheeler [7]).According to the above description as applied to the elevator case, the composition of two Lorentz boosts: from
). An alternative to this, from somewhere else nonsensical result, is preserving (in one way or another) the singleness of four-positions to satisfy the demand of logic, which is however achieved at the expense of breaking the rules of length contraction. Let us recap this section. Provided that elevator and rails match each other in the elevator frame and in the rails frame, they must also match each other in any other frame. The property of contacting, connected with the demand of the singleness of four-positions, cannot be frame-depended. Indeed, it must be not, and really, it is not! However, this is an argument from nature, not from theory. Nature is always internally coherent, or self-consistent, but its description (theory) does not automatically possess this vital property. What we really claim in our rebuttal is not denying the “conservation of the singleness of four-position”, but denying the ability of Lorentz transformation to fulfil both demands together, i.e. to predict the correct length contraction and to preserve the integrity of “composite points” due to the “singleness” of four-positions. The right theory should certainly satisfy both demands, namely preserve the singleness of four-positions in transformations and predict the correct length contraction. However, as crazy as it sounds, STR fails in this regard.3. Argument from the Thomas-Wigner rotationA specific prediction connected with STR states that composition of two (or more) non-collinear Lorentz boosts does not give a pure Lorentz boost along the final velocity as observed in the observer’s (initial) frame, but a composition of Lorentz boost and rotation, known as the Thomas-Wigner rotation (TWR). In the case of orbital motion, we deal with the sequence of (infinitesimal) TWRs, resulting in a periodic change of the spatial orientation of orbiting object, known as Thomas precession (TP) [12]. This effect explains the otherwise unexplainable observation in quantum physics, namely relativistic correction to the spin-orbit interaction. A typical example is the precession of spin of electron orbiting around the nucleus. Within STR, Thomas precession is a direct consequence of the relativity of simultaneity associated with each participating TWR. As a result, TP is absent in cases when direction of spin is perpendicular to the plane of rotation, i.e. parallel to y-axis (see e.g. comprehensive explanation by Taylor & Wheeler [7]).According to the above description as applied to the elevator case, the composition of two Lorentz boosts: from  to
to  , and from
, and from  to
to  , is thought to give the Lorentz boost between
, is thought to give the Lorentz boost between  and
and  , complemented by TWR of the elevator together with frame
, complemented by TWR of the elevator together with frame  . Specifically, this would mean that Lorentz boost along velocity
. Specifically, this would mean that Lorentz boost along velocity  is followed by the rotation of elevator through a definite angle, namely just the one needed to “verticalize” the contracted elevator, thereby matching it to the rails. Consequently, despite diagonal direction of the elevator contraction in
is followed by the rotation of elevator through a definite angle, namely just the one needed to “verticalize” the contracted elevator, thereby matching it to the rails. Consequently, despite diagonal direction of the elevator contraction in  plane, no incompatibility between elevator and rails is expected (Fig. 7).
plane, no incompatibility between elevator and rails is expected (Fig. 7).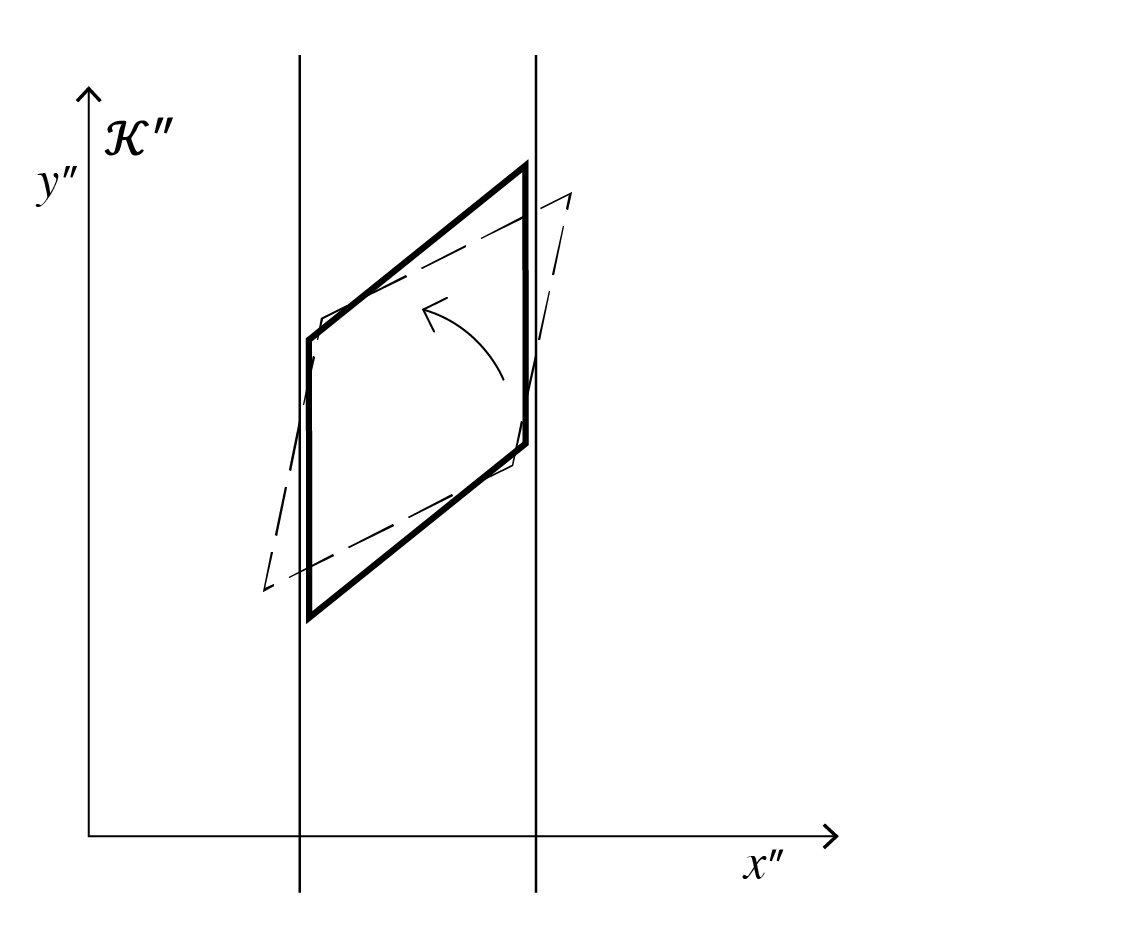 | Figure 7. Thomas-Wigner rotation as the putative solution to the elevator-shaft paradox. Rotation of frame  “verticalizes” the side-edges of contracted elevator (dashed line), matching them to the rails (solid line) “verticalizes” the side-edges of contracted elevator (dashed line), matching them to the rails (solid line) |
Nevertheless, it is not a difficult task to disprove the argument based on the Thomas-Wigner rotation. The point is not that TWR and TP are unreal in any sense. By all means they are real, both as an inherent prediction of STR and as the really observed effect (precession of spin). However, the crucial point is that TWR does not apply to the elevator case. A fundamental difference between the case of orbiting body, or generally, a body changing direction of its motion (due to the forces acting on it) and the here considered motion of elevator, is that motion in the first case is non-inertial, while it is doubtlessly inertial in the present (elevator) case. Namely, in opposition to a body moving along the curvilinear path (smooth curve or polygonal chain), thereby changing (constantly or occasionally) inertial frames, the elevator moves rectilinearly, hence occupies all the time the same inertial frame  . Consequently, the Lorentz boost between the elevator frame
. Consequently, the Lorentz boost between the elevator frame  and the observer’s frame
and the observer’s frame  should not be considered as a composition of Lorentz boosts between
should not be considered as a composition of Lorentz boosts between  and
and  , and
, and  and
and  in the sense corresponding to TWR. It is pretty clear that Thomas-Wigner rotation pertains solely and exclusively to the composition of mutually non-collinear inertial frames (at least three of them, including observer’s frame) participating in motion, i.e. to the frames contributing to the curvilinear trajectory of a given body in spacetime. With no doubt, the frame
in the sense corresponding to TWR. It is pretty clear that Thomas-Wigner rotation pertains solely and exclusively to the composition of mutually non-collinear inertial frames (at least three of them, including observer’s frame) participating in motion, i.e. to the frames contributing to the curvilinear trajectory of a given body in spacetime. With no doubt, the frame  , despite its specific role in the elevator-shaft paradox, does not participate in the elevator motion. The elevator is not even for a moment at rest with respect to the rails, that is to frame
, despite its specific role in the elevator-shaft paradox, does not participate in the elevator motion. The elevator is not even for a moment at rest with respect to the rails, that is to frame  . To better realize the problem, consider the motion of a body along the curvilinear path, e.g. the orbital motion. The real trajectory of orbiting body between two given points laid on the circumference (say, distanced of less than half of it) is neither physically equivalent to the “shortcut” charted along the chord connecting these points, nor to the “shortcut” comprehended as a “jump” between observer’s rest frame and the final inertial frame, both tangent to the orbit in said points. In contrast to this, the elevator trajectory is itself a “shortcut”, i.e. makes the straight line in spacetime, no matter what (inertial) frame it is observed from. In other words, the straight diagonal path of the elevator motion in
. To better realize the problem, consider the motion of a body along the curvilinear path, e.g. the orbital motion. The real trajectory of orbiting body between two given points laid on the circumference (say, distanced of less than half of it) is neither physically equivalent to the “shortcut” charted along the chord connecting these points, nor to the “shortcut” comprehended as a “jump” between observer’s rest frame and the final inertial frame, both tangent to the orbit in said points. In contrast to this, the elevator trajectory is itself a “shortcut”, i.e. makes the straight line in spacetime, no matter what (inertial) frame it is observed from. In other words, the straight diagonal path of the elevator motion in  plane constitutes real trajectory in
plane constitutes real trajectory in  , and not the imaginary one. The frames
, and not the imaginary one. The frames  (at rest to the elevator) and
(at rest to the elevator) and  (at rest to the train) are, at least from the viewpoint of the principle of relativity, physically identical to each other, as well as to all remaining inertial frames. It would be therefore illegitimate to assume that transformation between these very frames should involve the Thomas-Wigner rotation. Hence, what we really deal with in the elevator-shaft paradox is not the composition of two consecutive Lorentz boosts resulting in the Thomas-Wigner rotation (of elevator), but the pair of two concurrent Lorentz boosts: from
(at rest to the train) are, at least from the viewpoint of the principle of relativity, physically identical to each other, as well as to all remaining inertial frames. It would be therefore illegitimate to assume that transformation between these very frames should involve the Thomas-Wigner rotation. Hence, what we really deal with in the elevator-shaft paradox is not the composition of two consecutive Lorentz boosts resulting in the Thomas-Wigner rotation (of elevator), but the pair of two concurrent Lorentz boosts: from  to
to  and from
and from  to
to  , applying respectively to the rails and to the elevator, both these objects contributing to a one “composite object”, i.e. to the elevator “framed” by the rails. In order to avoid confusion, we should bear in mind an elementary distinction between the two notions: inertial frame (of reference) - physical entity of the properties defined by the laws of motion, and coordinate system - geometrical construct imposing a definite order on given inertial frame. According to this distinction, a single inertial frame is represented by infinitely many coordinate systems, differing by locations of the origin and orientation of axes. The rails and elevator are contracted in one and the same inertial frame
, applying respectively to the rails and to the elevator, both these objects contributing to a one “composite object”, i.e. to the elevator “framed” by the rails. In order to avoid confusion, we should bear in mind an elementary distinction between the two notions: inertial frame (of reference) - physical entity of the properties defined by the laws of motion, and coordinate system - geometrical construct imposing a definite order on given inertial frame. According to this distinction, a single inertial frame is represented by infinitely many coordinate systems, differing by locations of the origin and orientation of axes. The rails and elevator are contracted in one and the same inertial frame  along two different directions, corresponding to different directions of respective Lorentz boosts. Consequently, the frame
along two different directions, corresponding to different directions of respective Lorentz boosts. Consequently, the frame  is represented here by the two coordinate systems, each of them collinear with one of the mentioned directions.4. A “symmetrical” version of the elevator-shaft thought experimentLet us consider yet another one version of the thought experiment, which will provide us with an “argument from symmetry”. Let the velocity of rails in
is represented here by the two coordinate systems, each of them collinear with one of the mentioned directions.4. A “symmetrical” version of the elevator-shaft thought experimentLet us consider yet another one version of the thought experiment, which will provide us with an “argument from symmetry”. Let the velocity of rails in  be u (as previously), and the velocity of elevator measured in
be u (as previously), and the velocity of elevator measured in  be specified as
be specified as  . Then, according to Eq. (2), the horizontal and vertical components of the velocity vector
. Then, according to Eq. (2), the horizontal and vertical components of the velocity vector  are
are  and
and 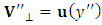 ; hence are equal in value. For these components, vector
; hence are equal in value. For these components, vector  and thereby the path traced out by elevator in
and thereby the path traced out by elevator in  is inclined at the angle 135° in
is inclined at the angle 135° in  plane (or 45°, while looking in
plane (or 45°, while looking in  negative direction). Consequently, the length contraction of the (square at rest) elevator takes place in the exactly symmetrical direction to its diagonals, namely parallelly to one of square diagonals and perpendicularly to the other one. In result, the square reshapes to the rhomb, with all four sides equally tilted with respect to
negative direction). Consequently, the length contraction of the (square at rest) elevator takes place in the exactly symmetrical direction to its diagonals, namely parallelly to one of square diagonals and perpendicularly to the other one. In result, the square reshapes to the rhomb, with all four sides equally tilted with respect to  direction, hence equally deviated from
direction, hence equally deviated from  and
and  directions. Now, the only unsymmetrical element in the whole composition are the rails. We may however complement our (anyway) imaginary experimental setup with the horizontal rails moving upwards in
directions. Now, the only unsymmetrical element in the whole composition are the rails. We may however complement our (anyway) imaginary experimental setup with the horizontal rails moving upwards in  direction with velocity
direction with velocity  . Despite this rearrangement, direction of the elevator motion in
. Despite this rearrangement, direction of the elevator motion in  remains untouched, being described by the same, equal in value velocity components. Consequently, we deal with two alternative scenarios as to the “factual” interpretation of the horizontal and vertical components of the diagonal trajectory of elevator. According to the first one, the elevator moves upwards with respect to the vertical rails moving to the left; according to the second one, the elevator moves to the left with respect to the horizontal rails moving upwards (Fig. 8).
remains untouched, being described by the same, equal in value velocity components. Consequently, we deal with two alternative scenarios as to the “factual” interpretation of the horizontal and vertical components of the diagonal trajectory of elevator. According to the first one, the elevator moves upwards with respect to the vertical rails moving to the left; according to the second one, the elevator moves to the left with respect to the horizontal rails moving upwards (Fig. 8). | Figure 8. Elevator moving in  along the direction inclined at the angle along the direction inclined at the angle  in in  plane. This motion can be alternatively described as 1) directed upwards relative to vertical rails moving to the left; or 2) directed to the left relative to horizontal rails moving upwards. The contracted elevator does not match the rails in plane. This motion can be alternatively described as 1) directed upwards relative to vertical rails moving to the left; or 2) directed to the left relative to horizontal rails moving upwards. The contracted elevator does not match the rails in  regardless of the “factual” scenario regardless of the “factual” scenario |
The above case evidently shows that neither of directions connected with the shape of elevator can be treated as privileged. Although the “argument from symmetry” adds nothing really substantial to that already has been said, yet this example is particularly expressive.5. Conclusion to Part ILet us take a glance at the elevator-shaft thought experiment describing it in a slightly different way, so to say, in the “reverse order”, i.e. starting from the observer’s frame. Assume that in the 2-dimensional observer’s frame, the two extended objects: the rectangular elevator and the parallel rails (2-dimensional elevator shaft) travel with the uniform rectilinear motion, each one along different path; both forming the acute angle. With reference to the mentioned objects, the respective directions of motion are defined as: perpendicular to the rails and diagonal to the elevator, e.g. parallel to the diagonal of rectangle. All the time, these objects remain in a close mutual spatial relationship, namely elevator moves along (inside) the rails, while both in the rails and elevator rest frames the vertical side-edges of elevator adhere to the rails. However, in the observer’s frame, each of these objects is subject to the length contraction along direction of its motion in this frame. In result, the rails get closer to each other without changing their direction, while the elevator reshapes from rectangle to rhomboid, therefore changing direction of all its sides. In consequence, elevator and rails do not match each other in the observer’s frame. Considering the perfect fit between elevator and rails in both their rest frames, this means a contradiction indicating an inconsistency of STR.In order to find out a way from the above puzzle so as to overcome this purely negative result, one has to take into account the crucial (though persistently ignored) fact, namely that Lorentz transformation is not the only transformation predicting the length contraction and time dilation. We shall examine this question in details in Part II. In particular, in Sec.10 we’ll demonstrate how the introduced theory (and respective transformation) deals with the presented elevator case in various configurations. For now, let us only mention that the difference between the Lorentz transformation and its competitive equivalent consists (in this regard) in the distinction between relative and absolute motion, each one assumed as the source of “relativistic” effects.
3. Part II
Alternative to Special Relativity: theory based on the assumption of preferred frame1. Transformation regarding the postulate of preferred frameThe demonstrated inconsistency of Special Relativity entails the need of introducing an alternative theory, mathematically consistent and compatible with all known experiments. In the following sections we shall present and discuss the Preferred Frame Theory (PFT) in this regard.In contrast to STR founded on the principle of relativity (first postulate), PFT is founded on assumption that the so-called “relativistic effects” are in fact “absolute”, ergo detectable (directly or indirectly) in any inertial frame, including the rest frame of the observed object. Consequently, these effects are thought to be caused by the absolute motion, defined as the motion with respect to a certain physically preferred frame (absolute space). In a close link to that assumption (and in opposition to the second STR postulate) the velocity of light is assumed to be constant (isotropic) in the preferred frame only, while in any other inertial frame it is thought to depend on the observer’s absolute velocity and the direction of emission, due to the real distortion of clocks and measuring rods at rest in the observer’s frame. If consequently applied, these assumptions do not lead to the Lorentz transformation (LT), but to a different transformation formulated only some half-century later by Tangherlini [13], hereinafter called the Tangherlini transformation (TT):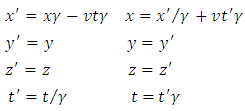 | (4) |
where Lorentz factor  is the function of the absolute velocity
is the function of the absolute velocity  . In contrast to symmetry featuring LT, the primed and unprimed coordinates are not exchangeable in TT; unprimed coordinates refer to the preferred frame
. In contrast to symmetry featuring LT, the primed and unprimed coordinates are not exchangeable in TT; unprimed coordinates refer to the preferred frame  , while the primed ones refer to
, while the primed ones refer to  - the frame in absolute motion. TT is usually regarded as the special case of a wider class of “equivalent” transformations including Lorentz transformation, based on the Reichenbach’s synchronization parameter
- the frame in absolute motion. TT is usually regarded as the special case of a wider class of “equivalent” transformations including Lorentz transformation, based on the Reichenbach’s synchronization parameter  , related to the possible difference between the one-way and two-way velocities of light (Reichenbach [14], Selleri [15], [16]). In general, Reichenbach’s parameter admits free value of
, related to the possible difference between the one-way and two-way velocities of light (Reichenbach [14], Selleri [15], [16]). In general, Reichenbach’s parameter admits free value of  such that
such that  , wherein
, wherein  corresponds with the one-way velocity of light equal to c, in agreement with the STR second postulate. In fact, as far as we can judge, the case
corresponds with the one-way velocity of light equal to c, in agreement with the STR second postulate. In fact, as far as we can judge, the case  (opposing
(opposing  ) does not refer to a hypothetical set of “in-between” transformations, but applies specifically to TT, whereas the “freedom” of coefficient
) does not refer to a hypothetical set of “in-between” transformations, but applies specifically to TT, whereas the “freedom” of coefficient  corresponds with the differences in values of absolute velocity of different frames, combined with different angles of emission in each particular frame (see Sec.3 for details).In some respects, TT reminds the Galilean transformation as opposed to the Lorentz transformation. Namely, unlike in LT, the time coordinate does not depend on space coordinates; hence simultaneity is defined as absolute. On the other hand, TT is not symmetrical due to the principle of relativity (i.e. does not comply neither with Lorentz nor Galilean symmetry), which distinguishes it from both Galilean and Lorentz transformations. It forms instead a sort of axial symmetry with the preferred frame acting as “axis of symmetry”. From the viewpoint of TT, the principle of relativity is a pure Galilean property connected with Galilean transformation, “emerging” at the limit
corresponds with the differences in values of absolute velocity of different frames, combined with different angles of emission in each particular frame (see Sec.3 for details).In some respects, TT reminds the Galilean transformation as opposed to the Lorentz transformation. Namely, unlike in LT, the time coordinate does not depend on space coordinates; hence simultaneity is defined as absolute. On the other hand, TT is not symmetrical due to the principle of relativity (i.e. does not comply neither with Lorentz nor Galilean symmetry), which distinguishes it from both Galilean and Lorentz transformations. It forms instead a sort of axial symmetry with the preferred frame acting as “axis of symmetry”. From the viewpoint of TT, the principle of relativity is a pure Galilean property connected with Galilean transformation, “emerging” at the limit  . Understandably enough, Tangherlini transformation did not receive broad attention so far. According to the prevailing opinion (e.g. [17]), TT is wholly equivalent in experiments to the Lorentz transformation. Meanwhile, it is admittedly equivalent to it in a wide class of cases, but not totally [18a, 18b]. We shall develop this point in Ss. 4 and 5.The above form of Tangherlini transformation does not exhaust all possibilities resulting from PFT; hence in this regard it is more “specific” than Lorentz transformation and even the Lorentz boost. While in Eq. (4) the non-primed coordinates are the preferred ones, in the general case, both frames may differ from the preferred frame; consequently, they may remain in a free relationship as to their individual absolute velocities (including symmetrical case with equal absolute velocities) and to the direction of respective absolute velocity vectors. This all makes the general form of TT more complicated, nevertheless reducible to simpler cases according to the principle of correspondence [19]. Anyhow, for our present purposes the above form (TT) is fully sufficient and adequate.2. “Corresponding” velocities between two frames vs. single relative velocityUnlike in LT, the velocity
. Understandably enough, Tangherlini transformation did not receive broad attention so far. According to the prevailing opinion (e.g. [17]), TT is wholly equivalent in experiments to the Lorentz transformation. Meanwhile, it is admittedly equivalent to it in a wide class of cases, but not totally [18a, 18b]. We shall develop this point in Ss. 4 and 5.The above form of Tangherlini transformation does not exhaust all possibilities resulting from PFT; hence in this regard it is more “specific” than Lorentz transformation and even the Lorentz boost. While in Eq. (4) the non-primed coordinates are the preferred ones, in the general case, both frames may differ from the preferred frame; consequently, they may remain in a free relationship as to their individual absolute velocities (including symmetrical case with equal absolute velocities) and to the direction of respective absolute velocity vectors. This all makes the general form of TT more complicated, nevertheless reducible to simpler cases according to the principle of correspondence [19]. Anyhow, for our present purposes the above form (TT) is fully sufficient and adequate.2. “Corresponding” velocities between two frames vs. single relative velocityUnlike in LT, the velocity  present in TT is not a unique “relative” velocity between the frames
present in TT is not a unique “relative” velocity between the frames  and
and  . Instead, it stands solely for the velocity of
. Instead, it stands solely for the velocity of  measured in the preferred frame
measured in the preferred frame  , i.e. the absolute velocity of
, i.e. the absolute velocity of  . Likewise, the Lorentz factor relates to
. Likewise, the Lorentz factor relates to  , being the function of absolute velocity
, being the function of absolute velocity  . Because the effects of length contraction and time dilation are asymmetrical with respect to
. Because the effects of length contraction and time dilation are asymmetrical with respect to  and
and  (they primarily affect objects at rest in
(they primarily affect objects at rest in  only), so mutual velocities of
only), so mutual velocities of  and
and  cannot be equal. The measured in
cannot be equal. The measured in  velocity of
velocity of  is determined, apart from the absolute velocity of
is determined, apart from the absolute velocity of  , also by “distortion” of measuring rods and clocks at rest in this frame. The respective effects accumulate, in result of which the measured in
, also by “distortion” of measuring rods and clocks at rest in this frame. The respective effects accumulate, in result of which the measured in  velocity of the preferred frame
velocity of the preferred frame  relates to
relates to  as:
as: | (5) |
We call  and
and  the “corresponding” velocities.3. Velocity of light according to PFTThe velocity of light undergoes basically the same rules as any other absolute velocity. In the preferred frame
the “corresponding” velocities.3. Velocity of light according to PFTThe velocity of light undergoes basically the same rules as any other absolute velocity. In the preferred frame  , the light signal travels with the velocity c regardless of the motion of the source and the direction of emission (is isotropic). Provided Galilean transformation, the velocities of light traveling along
, the light signal travels with the velocity c regardless of the motion of the source and the direction of emission (is isotropic). Provided Galilean transformation, the velocities of light traveling along  -axis in frame
-axis in frame  would be
would be  , in positive direction (i.e. direction of motion of
, in positive direction (i.e. direction of motion of  relative to
relative to  ) and
) and  in negative direction. However, in accordance with TT, length contraction and time dilation affecting standards of length and time in
in negative direction. However, in accordance with TT, length contraction and time dilation affecting standards of length and time in  contribute to respective velocities, yielding:
contribute to respective velocities, yielding:  | (6) |
where c stands for the velocity of light in the preferred frame. For the so-defined velocities, one can prove: | (7) |
In the general case, i.e. for arbitrary angle  of propagation of the ray in relation to
of propagation of the ray in relation to  positive direction, as observed in
positive direction, as observed in  , the velocity of light is:
, the velocity of light is: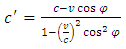 | (8) |
The light front determined by this equation forms the prolate spheroid (reducible to sphere in  ), with the source of emission placed in the “frontal” focus. In this regard, difference between STR and PFT reminds the one between the circular orbits (as they were thought to be up to Galileo) and Kepler’s ellipses (Fig. 9).
), with the source of emission placed in the “frontal” focus. In this regard, difference between STR and PFT reminds the one between the circular orbits (as they were thought to be up to Galileo) and Kepler’s ellipses (Fig. 9).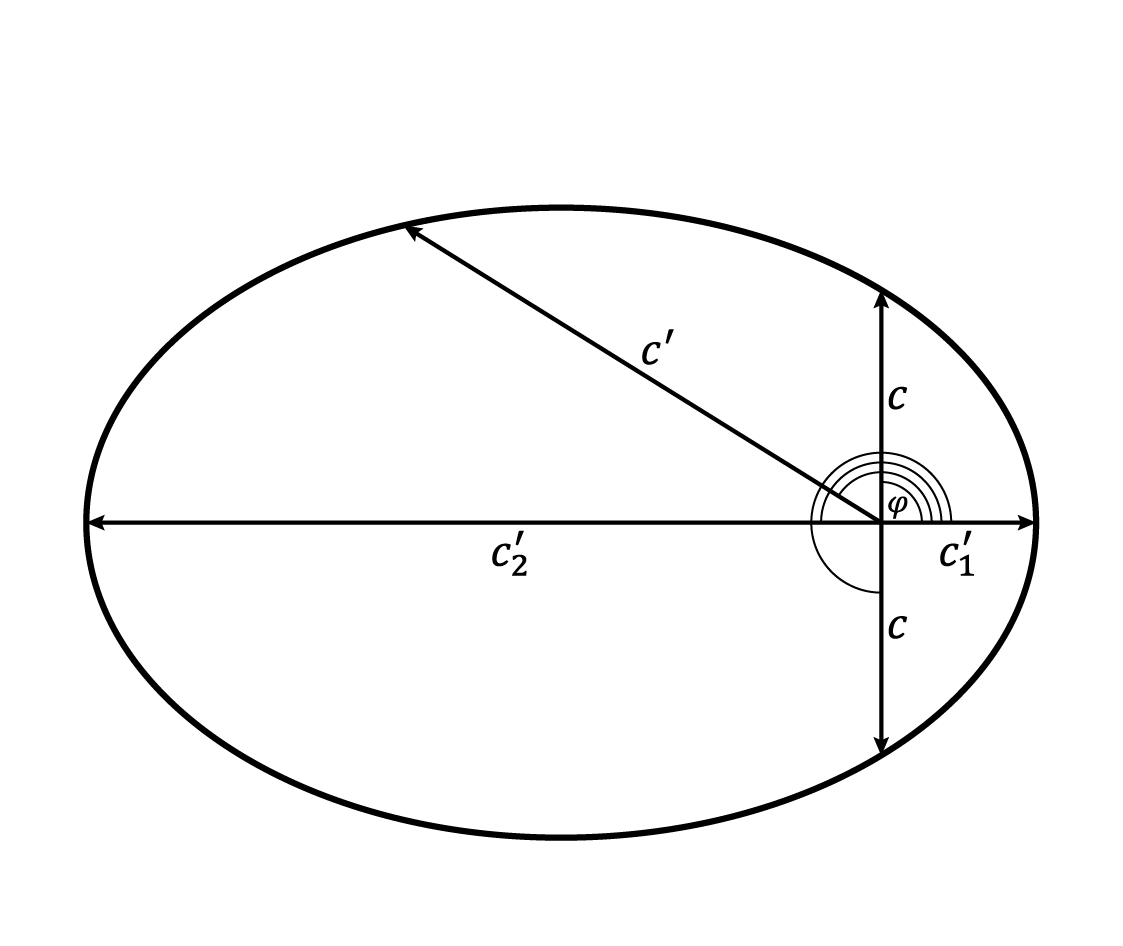 | Figure 9. Velocity of light in the absolutely moving inertial frame. The light front forms the prolate spheroid (ellipse in 2D depiction), with the source of emission located in the “frontal” focus |
Because  , so the time of a round trip along the straight path
, so the time of a round trip along the straight path  in frame
in frame  equals:
equals: | (9) |
Hence the averaged velocity on distance  is c. Generally, the averaged velocity of light traveling along any closed path demarcated in any inertial frame equals c. A mathematical basis for this property is a theorem according to which an integral over free (smooth) closed curve in relation to an arbitrary straight line equals zero.4. STR vs. PFT: empirical equivalence in the area of kinematicsa) Transformations of distance and time according to LT and TTIn order to describe the motion of an object in kinematical terms, one needs reliable measures of space and time, as referred to the observer’s frame. This demand does not present any difficulties in the case of Galilean transformation (hence in the range of small velocities in the real world) in which the mentioned measures are invariant. Instead, for the velocities comparable with c it gets more complicated since the definition of “measurement” depends on the choice of transformation. In a given reference frame there are available, as obtained directly, only the readings of a single clock at rest and the distance measured by stationary measuring rod. We call these quantities “independent”. The remaining quantities have to be obtained indirectly and depend on transformation; hence we call them “dependent”. In other words, “dependent” means that respective quantity varies due to the choice of transformation (here alternatively LT and TT), while “independent” means the opposite. Let
is c. Generally, the averaged velocity of light traveling along any closed path demarcated in any inertial frame equals c. A mathematical basis for this property is a theorem according to which an integral over free (smooth) closed curve in relation to an arbitrary straight line equals zero.4. STR vs. PFT: empirical equivalence in the area of kinematicsa) Transformations of distance and time according to LT and TTIn order to describe the motion of an object in kinematical terms, one needs reliable measures of space and time, as referred to the observer’s frame. This demand does not present any difficulties in the case of Galilean transformation (hence in the range of small velocities in the real world) in which the mentioned measures are invariant. Instead, for the velocities comparable with c it gets more complicated since the definition of “measurement” depends on the choice of transformation. In a given reference frame there are available, as obtained directly, only the readings of a single clock at rest and the distance measured by stationary measuring rod. We call these quantities “independent”. The remaining quantities have to be obtained indirectly and depend on transformation; hence we call them “dependent”. In other words, “dependent” means that respective quantity varies due to the choice of transformation (here alternatively LT and TT), while “independent” means the opposite. Let  be the observer’s rest frame and
be the observer’s rest frame and  the observed frame. According to PFT/TT (and to our formerly introduced notation),
the observed frame. According to PFT/TT (and to our formerly introduced notation),  is absolutely moving and
is absolutely moving and  determines absolute rest. Instead, according to STR/LT, both frames are entirely equivalent in agreement with the principle of relativity. In this subsection we shall test the uniform motion using transformation of time and of length (distance) from
determines absolute rest. Instead, according to STR/LT, both frames are entirely equivalent in agreement with the principle of relativity. In this subsection we shall test the uniform motion using transformation of time and of length (distance) from  to
to  alternatively according to LT and TT, as well as defining the velocity due to each transformation. In that way we shall infer “dependent” values straight from transformation, treating respective values in
alternatively according to LT and TT, as well as defining the velocity due to each transformation. In that way we shall infer “dependent” values straight from transformation, treating respective values in  as known data. In the case of point-object at rest in
as known data. In the case of point-object at rest in  , defining its uniform motion in
, defining its uniform motion in  means juxtaposing two “dependent” quantities (velocity and time) with one “independent” (distance), measured in
means juxtaposing two “dependent” quantities (velocity and time) with one “independent” (distance), measured in  . Instead, in the case of extended object (measuring rod) at rest in
. Instead, in the case of extended object (measuring rod) at rest in  , the “dependent” quantities are its length and velocity as referred to
, the “dependent” quantities are its length and velocity as referred to  , while the “independent” quantity is time, comprehended as the time-difference between two indications of a single clock at rest in
, while the “independent” quantity is time, comprehended as the time-difference between two indications of a single clock at rest in  . Hence, the criterion of equivalence consists in satisfying the following condition: two “dependent” quantities should give (respectively: in product and in quotient) a definite “independent” quantity, the same for each transformation. Below we shall test LT and TT according to these two arrangements.Case 1. Consider the motion of a point-object (clock) at rest in
. Hence, the criterion of equivalence consists in satisfying the following condition: two “dependent” quantities should give (respectively: in product and in quotient) a definite “independent” quantity, the same for each transformation. Below we shall test LT and TT according to these two arrangements.Case 1. Consider the motion of a point-object (clock) at rest in  , on distance
, on distance  marked out in frame
marked out in frame  . Let the moving clock measure the proper time during its motion along
. Let the moving clock measure the proper time during its motion along  . Let this time, defined as the difference of clock indications between the moments of passing the front and rear ends of
. Let this time, defined as the difference of clock indications between the moments of passing the front and rear ends of  be T. Assuming that velocity of
be T. Assuming that velocity of  in
in  is
is  , the velocity of clock relative to
, the velocity of clock relative to  would be, in accordance with LT:
would be, in accordance with LT:  , and according to TT:
, and according to TT:  . In turn, the travel time of the clock along distance
. In turn, the travel time of the clock along distance  , as determined in
, as determined in  is, according to LT:
is, according to LT:  , and according to TT:
, and according to TT:  . Hence STR predicts:
. Hence STR predicts: | (10) |
Instead, according to PFT we have: | (11) |
It follows that despite the difference in predictions as to the velocity of clock and the time of its travel along the measuring rod (“dependent” quantities in  ) the effective result (“independent” quantity
) the effective result (“independent” quantity  ) is identical, which means empirical equivalence of STR and PFT in this case.Case 2. Consider the motion in
) is identical, which means empirical equivalence of STR and PFT in this case.Case 2. Consider the motion in  of the measuring rod at rest in
of the measuring rod at rest in  , whose length as measured in
, whose length as measured in  equals L. Let the rod, oriented in line with
equals L. Let the rod, oriented in line with  -axes, pass a single clock at rest in
-axes, pass a single clock at rest in  . We ask for the time
. We ask for the time  indicated by this clock between passing it by the front and rear ends of the rod. As for the point-object formerly considered, the velocity of rod in
indicated by this clock between passing it by the front and rear ends of the rod. As for the point-object formerly considered, the velocity of rod in  is, according to LT:
is, according to LT:  and according to TT:
and according to TT:  . The length of the rod in
. The length of the rod in  is, according to LT:
is, according to LT:  , and according to TT:
, and according to TT:  . Hence, in accord with STR we have:
. Hence, in accord with STR we have: | (12) |
Instead, PFT predicts: | (13) |
As before, in spite of differences in predictions as to the length and velocity taken separately (“dependent” quantities in  ), the effective result (“independent” quantity
), the effective result (“independent” quantity  ) is identical, which, as previously, means empirical equivalence of both transformations in this case.b) Equivalence of synchronization conventionsIn this subsection we shall take virtual measurement of the velocity of a point-object using the readings of two distanced clocks at rest in
) is identical, which, as previously, means empirical equivalence of both transformations in this case.b) Equivalence of synchronization conventionsIn this subsection we shall take virtual measurement of the velocity of a point-object using the readings of two distanced clocks at rest in  . This task requires defining simultaneity in the observer’s frame, which in turn involves the necessity of choice of a definite synchronizing convention related to given transformation. In particular, we shall test whether the velocity defined according to STR, combined with respective synchronization, is equivalent to the velocity defined according to PFT, also combined with respective synchronization. Consider the motion in
. This task requires defining simultaneity in the observer’s frame, which in turn involves the necessity of choice of a definite synchronizing convention related to given transformation. In particular, we shall test whether the velocity defined according to STR, combined with respective synchronization, is equivalent to the velocity defined according to PFT, also combined with respective synchronization. Consider the motion in  of a point-object (particle) at rest in
of a point-object (particle) at rest in  , along distance
, along distance  (measuring rod at rest in
(measuring rod at rest in ) with two clocks
) with two clocks  and
and  on its both ends. As before, velocity of
on its both ends. As before, velocity of  relative to
relative to  is
is  . We synchronize these clocks by the light ray, having regard to the velocity of light defined alternatively by LT and TT. Likewise, alternatively, we determine velocity of the particle traveling along distance
. We synchronize these clocks by the light ray, having regard to the velocity of light defined alternatively by LT and TT. Likewise, alternatively, we determine velocity of the particle traveling along distance  from
from  to
to  . An ultimate criterion of equivalence and self-consistency of both descriptions is the indication of clock
. An ultimate criterion of equivalence and self-consistency of both descriptions is the indication of clock  in the moment of passing it by the particle.Synchronization according to STR means the Einstein convention (EC) based on the STR light postulate. Hence, while sending the ray from the clock
in the moment of passing it by the particle.Synchronization according to STR means the Einstein convention (EC) based on the STR light postulate. Hence, while sending the ray from the clock  indicating time
indicating time  to the clock
to the clock  distanced of
distanced of  , we should set it in the moment of reaching it by the ray for the time:
, we should set it in the moment of reaching it by the ray for the time: | (14) |
Still according to LT, the velocity of a particle along the distance  from
from  to
to  is
is  ; hence, the (denoted by
; hence, the (denoted by  ) indication of clock
) indication of clock  in the moment of passing it by the particle is:
in the moment of passing it by the particle is: | (15) |
Instead, according to TT, the light synchronization in the direction from  to
to  means that (due to Eq. (6)) one has to set the clock
means that (due to Eq. (6)) one has to set the clock  in the moment of reaching it by the ray for:
in the moment of reaching it by the ray for: | (16) |
Because, according to TT, the velocity of particle traveling along  , from
, from  to
to  is
is  , so the clock
, so the clock  will indicate in the moment of passing it by the particle the time:
will indicate in the moment of passing it by the particle the time: | (17) |
This result is identical with that obtained in Eq. (15), which signifies empirical equivalence between STR and PFT in this case. In general, we may take for granted (and thus formulate as a rule) that relative simultaneity combined with constant velocity of light due to STR always gives identical results to these obtained from absolute simultaneity combined with inconstant velocity of light due to PFT. The so-defined equivalence covers large experimental area, which provides an explanation of why STR has not been questioned in experiments (or disproved by thought experiments) for more than a hundred years.However, for the reasons of geometrical inconsistency of STR demonstrated in Part I; and also considering departure from empirical equivalence in dynamics (discussed in Part II, Sec. 6), synchronization according to Einstein convention is applicable in the preferred frame only. In any other inertial frame, synchronization utilizing velocities of light defined according to Eq. (8) will confirm (will be identical with) the synchronization obtained from EC in the preferred frame. Concluding: synchronization performed according to EC in the preferred frame determines absolute simultaneity. As is known, Einstein convention considered as applicable in any inertial frame is inseparable from the postulate of relative simultaneity; consequently, synchronization according to PFT is inseparable from the postulate of absolute simultaneity.c) Empirical equivalence of the velocity addition formulaeLet the frame  move relative to frame
move relative to frame  with the velocity
with the velocity  . Let the particle at rest in another frame
. Let the particle at rest in another frame  move with respect to
move with respect to  with the velocity V in the direction parallel to the motion of
with the velocity V in the direction parallel to the motion of  relative to
relative to  . According to the Galilean transformation, the resultant velocity of this particle in
. According to the Galilean transformation, the resultant velocity of this particle in  would be:
would be: | (18) |
Instead, the respective velocity derived from LT is:  | (19) |
Let us find an analogous formula for PFT/TT. Since we consider the result of summation as referred to  that is assumed to be the preferred frame, so velocities
that is assumed to be the preferred frame, so velocities  and
and  , as absolute velocities of
, as absolute velocities of  and
and  respectively, will not change in the PFT scenario. However, the question of velocity V looks different. This velocity refers to frame
respectively, will not change in the PFT scenario. However, the question of velocity V looks different. This velocity refers to frame  that according to STR is equivalent (physically identical) with
that according to STR is equivalent (physically identical) with  , whereas according to PFT differs from
, whereas according to PFT differs from  . From the fact that
. From the fact that  and
and  remain unchanged in PFT (compared to respective values in STR) it follows that velocity of the particle relative to
remain unchanged in PFT (compared to respective values in STR) it follows that velocity of the particle relative to  , as referred to
, as referred to  , equals:
, equals: | (20) |
Because the measuring rods are contracted in  and the clocks are retarded by the Lorentz factor (respectively:
and the clocks are retarded by the Lorentz factor (respectively:  ), hence in frame
), hence in frame  the velocity of the particle is:
the velocity of the particle is: | (21) |
(We use symbol  instead of simply
instead of simply  , since, in the following equations, we shall use the Lorentz factor also as a function of other than
, since, in the following equations, we shall use the Lorentz factor also as a function of other than  velocities, measured in
velocities, measured in  ). Eventually, the PFT velocity addition formula applied to summation in the preferred frame
). Eventually, the PFT velocity addition formula applied to summation in the preferred frame  has the form:
has the form: | (22) |
Let us compare this formula with the STR velocity addition (Eq. (19)). Our goal is to test whether velocity V, defined according to LT, is empirically equivalent to velocity  , defined according to TT. Let us convert Eq. (19) to the form:
, defined according to TT. Let us convert Eq. (19) to the form: | (23) |
Now, the STR velocity addition reminds respective PFT formula (i.e. Eq. (22)); moreover, both formulae will totally coincide if we define velocity  as:
as: | (24) |
Hence, the question of equivalence between the formulae (19) and (22) reduces to another question, namely whether velocities V and  are distinguishable in kinematical experiments. To answer this question, let us consider the following example. Let the “added” velocity (defined by STR as V, and by PFT as
are distinguishable in kinematical experiments. To answer this question, let us consider the following example. Let the “added” velocity (defined by STR as V, and by PFT as  ) be the velocity of a rod at rest in
) be the velocity of a rod at rest in  of the length L, measured in
of the length L, measured in  . Let this rod pass the clock at rest in
. Let this rod pass the clock at rest in  . As it was in Case 2, the criterion of empirical equivalence between LT and TT are the readings (equal or not) of the clock in the moment of passing it by the rear end of the rod. To fulfil the criterion of equivalence, respective readings should be identical despite different (due to LT and TT) values of the rod length and its velocity, both inserted to the equation for time. We assume that clock, when passed by the front end of the rod, in both scenarios indicates identical time
. As it was in Case 2, the criterion of empirical equivalence between LT and TT are the readings (equal or not) of the clock in the moment of passing it by the rear end of the rod. To fulfil the criterion of equivalence, respective readings should be identical despite different (due to LT and TT) values of the rod length and its velocity, both inserted to the equation for time. We assume that clock, when passed by the front end of the rod, in both scenarios indicates identical time  . According to LT, the length of rod in
. According to LT, the length of rod in  is
is  . Instead, according to TT, the length of rod results from the mutual relation of observer’s frame and the rod rest frame (expressed by the quotient of respective Lorentz factors), both referred to the preferred frame
. Instead, according to TT, the length of rod results from the mutual relation of observer’s frame and the rod rest frame (expressed by the quotient of respective Lorentz factors), both referred to the preferred frame  :
: | (25) |
The requirement of identical clock indications is tantamount to the requirement of equality between respective times. Hence, we have to settle if:  | (26) |
Because: | (27) |
so, Eq. (23) takes the form: | (28) |
Simplifying and rearranging gives: | (29) |
After rewriting Lorentz factors, we obtain (for c = 1): | (30) |
which confirms empirical equivalence between Eq. (19) and Eq. (22).Eq. (22) is however not the general PFT formula for the velocity addition since (first of all) it applies exclusively to summation in the preferred system  . This in particular means that final velocity (here denoted
. This in particular means that final velocity (here denoted  ) is identical for STR and PFT. Meanwhile, in a more general case of summation in x positive direction, performed in a frame different from the preferred one (here denoted
) is identical for STR and PFT. Meanwhile, in a more general case of summation in x positive direction, performed in a frame different from the preferred one (here denoted  ), the final velocities derived alternatively from LT and TT might be different. Apart from regarding the absolute Lorentz factor for the “intermediate” frame (
), the final velocities derived alternatively from LT and TT might be different. Apart from regarding the absolute Lorentz factor for the “intermediate” frame ( in Eq. (22)) we must also take into account the absolute Lorentz factor for
in Eq. (22)) we must also take into account the absolute Lorentz factor for  , i.e. the one in which summation is performed. In other words, Eq. (22) refers to the particular case in which the Lorentz factor for the observer equals 1, while in the general case it may differ from 1. The generalized “collinear” velocity addition formula reads:
, i.e. the one in which summation is performed. In other words, Eq. (22) refers to the particular case in which the Lorentz factor for the observer equals 1, while in the general case it may differ from 1. The generalized “collinear” velocity addition formula reads: | (31) |
where  denotes the absolute Lorentz factor for the observer’s frame
denotes the absolute Lorentz factor for the observer’s frame  ,
,  - absolute Lorentz factor for “intermediate” frame
- absolute Lorentz factor for “intermediate” frame  ,
,  - velocity of “intermediate” frame
- velocity of “intermediate” frame  relative to
relative to  , as measured in the preferred frame
, as measured in the preferred frame  . Velocity
. Velocity  corresponds to velocity
corresponds to velocity  in Eq. (22). Instead,
in Eq. (22). Instead,  denotes velocity of the particle in “intermediate” frame
denotes velocity of the particle in “intermediate” frame  , namely:
, namely: | (32) |
corresponding to velocity  in Eq. (22).5. STR vs. PFT: identical predictions concerning momentumAssume that an object (particle) at rest in
in Eq. (22).5. STR vs. PFT: identical predictions concerning momentumAssume that an object (particle) at rest in  falls apart into two parts (here called “forward” and “backward” particles, denoted respectively
falls apart into two parts (here called “forward” and “backward” particles, denoted respectively  and
and  ) receding in opposite directions along
) receding in opposite directions along  -axis so that net momentum in
-axis so that net momentum in  amounts to zero. Let “forward” means the direction compatible with the motion of
amounts to zero. Let “forward” means the direction compatible with the motion of  relative to
relative to  , while “backward” - the opposite direction. Let the rest mass of each particle be
, while “backward” - the opposite direction. Let the rest mass of each particle be  . In accordance with STR, the momentum of each particle in
. In accordance with STR, the momentum of each particle in  (for c = 1) is:
(for c = 1) is:  | (33) |
where V is the relative velocity between each of the considered particles and frame  . Instead, in accordance with PFT, the respective momentum is:
. Instead, in accordance with PFT, the respective momentum is: | (34) |
The term  denotes the mass of a given particle as measured in
denotes the mass of a given particle as measured in  , where
, where  is the Lorentz factor for the observer’s frame
is the Lorentz factor for the observer’s frame  , and
, and  the Lorentz factor for the particle, both related to the preferred frame
the Lorentz factor for the particle, both related to the preferred frame  . Instead,
. Instead,  denotes the measured in
denotes the measured in  relative velocity between each of (alternatively considered) particles:
relative velocity between each of (alternatively considered) particles:  or
or  and frame
and frame  (precisely: the absolute value of the vector difference between velocity of given particle and velocity of
(precisely: the absolute value of the vector difference between velocity of given particle and velocity of  , each case measured in
, each case measured in  ; hence
; hence  ). Because both the mass and velocity of
). Because both the mass and velocity of  and
and  depend on the direction of their motion in
depend on the direction of their motion in  , hence
, hence  and
and  are defined separately for each particle, henceforth respectively denoted:
are defined separately for each particle, henceforth respectively denoted:  and
and  . Instead, Lorentz factor
. Instead, Lorentz factor  remains unchanged in both cases.Our goal is to check whether the momenta of
remains unchanged in both cases.Our goal is to check whether the momenta of  and
and  equal each other, and whether they equal the momentum defined according to STR. Before entering to analysis, let’s make an obvious simplification of Eq. (34) reducing its “explanatory” form to:
equal each other, and whether they equal the momentum defined according to STR. Before entering to analysis, let’s make an obvious simplification of Eq. (34) reducing its “explanatory” form to:  | (35) |
Taking advantage of the equivalence of addition formulae according to STR (19) and PFT (22), we define the particles velocity in  as:
as: | (36) |
with positive signs for  and negative for
and negative for  . Hence, respective absolute Lorentz factors are:
. Hence, respective absolute Lorentz factors are: | (37) |
and | (38) |
After substituting to Eq. (35) we obtain the momentum  for particle
for particle  :
: | (39) |
Similarly, we derive the momentum  for particle
for particle  :
: | (40) |
This means equality of momenta of the particles  and
and  , as well as equality of respective momenta with the momentum defined according to STR.6. PFT: disparity between energy and momentum in the absolutely moving frames (asymmetry of energy distribution)Before rewriting Eq. (31), we have reduced it to Eq. (35); now however, we’ll turn back to the original form since we need separate expressions for mass in frame
, as well as equality of respective momenta with the momentum defined according to STR.6. PFT: disparity between energy and momentum in the absolutely moving frames (asymmetry of energy distribution)Before rewriting Eq. (31), we have reduced it to Eq. (35); now however, we’ll turn back to the original form since we need separate expressions for mass in frame  . The mass of particle
. The mass of particle  is:
is: | (41) |
Instead, the mass of particle  is:
is: | (42) |
It follows that  . Provided the mass-energy equivalence, this implies different total energies of particles
. Provided the mass-energy equivalence, this implies different total energies of particles  and
and  , despite equality of their momenta. Let us write this result:
, despite equality of their momenta. Let us write this result: | (43) |
 | (44) |
We call this effect “energy-momentum disparity” - a phenomenon expected to take place in any absolutely moving frame. The “energy-momentum disparity” has (among others) the following properties. Independently of the absolute velocity of inertial observer, the momenta of moving particles are the same as they are in STR. Besides, for equal momenta of particles moving in opposite directions, their averaged energy is for all angles identical with that defined by STR. In this specific sense, we may call the averaged energy isotropic.7. PFT: energy of massive body Let us replace the “working” symbols  and
and  used in previous sections by the “general” ones:
used in previous sections by the “general” ones:  and
and  , where
, where  will denote the absolute Lorentz factor for the observed object and
will denote the absolute Lorentz factor for the observed object and  - the absolute Lorentz factor for observer. According to PFT, in an arbitrary, absolutely moving inertial frame (here represented by
- the absolute Lorentz factor for observer. According to PFT, in an arbitrary, absolutely moving inertial frame (here represented by  ) total energy of the observed object is given by formula:
) total energy of the observed object is given by formula: | (45) |
For the object at rest in  one has
one has  ; consequently, the above equation reduces to
; consequently, the above equation reduces to  , which coincides with STR formula for the body at rest. Instead, in the preferred frame
, which coincides with STR formula for the body at rest. Instead, in the preferred frame  (i.e. for
(i.e. for  ) for an arbitrary value of
) for an arbitrary value of 
 Eq. (45) reduces to:
Eq. (45) reduces to: | (46) |
which coincides with the STR formula for the moving body. In turn, in the case of an object at rest in the preferred frame  , observed in the moving frame
, observed in the moving frame 
 Eq. (45) reduces to:
Eq. (45) reduces to: | (47) |
meaning that in this case total energy is smaller than rest energy - the result only apparently paradoxical. Let us express energy in terms of energy-momentum disparity and, generally, in terms of energy-momentum relation. The respective STR equation is: | (48) |
According to PFT, in the general case related to an arbitrary absolutely moving observer’s frame  , energy depends on the magnitude of energy-momentum disparity that, in turn, depends on the direction of motion of the particle in
, energy depends on the magnitude of energy-momentum disparity that, in turn, depends on the direction of motion of the particle in  . The respective formula reads:
. The respective formula reads: | (49) |
where  is the velocity of
is the velocity of  measured in preferred frame
measured in preferred frame  , and
, and  - the measured in
- the measured in  angle between the velocity vector of the motion of
angle between the velocity vector of the motion of  relative to
relative to  and the velocity vector for the observed particle (hence, the case
and the velocity vector for the observed particle (hence, the case  ,
,  corresponds to the “backward” direction of the particle motion; in the particular case of a particle at rest in
corresponds to the “backward” direction of the particle motion; in the particular case of a particle at rest in  , coinciding with Eq. (47)). It is clear that “orthogonal” case
, coinciding with Eq. (47)). It is clear that “orthogonal” case  is the only one for which the STR energy-momentum relation holds in the absolutely moving frame. 8. PFT: energy and momentum of photonAccording to STR, energy of photon is given by the formula:
is the only one for which the STR energy-momentum relation holds in the absolutely moving frame. 8. PFT: energy and momentum of photonAccording to STR, energy of photon is given by the formula: | (50) |
Instead, the photon momentum defined by STR is: | (51) |
(h- Planck constant, f- frequency, c- speed of light,  - photon wavelength) Let the source of emission be at rest in the absolutely moving frame
- photon wavelength) Let the source of emission be at rest in the absolutely moving frame  . According to PFT, the velocity of light in
. According to PFT, the velocity of light in  depends on absolute velocity of
depends on absolute velocity of  and on direction of emission, in accordance with Eq. (8). For the source of emission at rest in
and on direction of emission, in accordance with Eq. (8). For the source of emission at rest in  the frequency observed in
the frequency observed in  is identical in all directions (is isotropic), which is a consequence of the homogeneity of time in any inertial frame. More specifically, for any particular absolute velocity of
is identical in all directions (is isotropic), which is a consequence of the homogeneity of time in any inertial frame. More specifically, for any particular absolute velocity of  combined with any arbitrary frequency of the source
combined with any arbitrary frequency of the source  and the angle of emission
and the angle of emission  , one has:
, one has: | (52) |
where  denotes the angle of emission, and
denotes the angle of emission, and  - frequency of the source. This explains the negative results of Michelson-Morley and Kennedy-Thorndike experiments, despite the predicted by PFT inconstant (anisotropic) velocity of light and anisotropic wavelength. Rearranging and implementing the Planck constant gives:
- frequency of the source. This explains the negative results of Michelson-Morley and Kennedy-Thorndike experiments, despite the predicted by PFT inconstant (anisotropic) velocity of light and anisotropic wavelength. Rearranging and implementing the Planck constant gives:  | (53) |
It follows that, for a given frequency  of the source, the observed energy of photon depends on the direction of emission, being inversely proportional to the wavelength (and to velocity), while the observed frequency remains constant, regardless of the direction of mission. This differentiates PFT from the respective STR description, according to which “inversely proportional to wavelength” is tantamount with “proportional to frequency”. The latter holds (exactly) in PFT in the preferred frame only. From Eq. (53) one derives the momentum of photon:
of the source, the observed energy of photon depends on the direction of emission, being inversely proportional to the wavelength (and to velocity), while the observed frequency remains constant, regardless of the direction of mission. This differentiates PFT from the respective STR description, according to which “inversely proportional to wavelength” is tantamount with “proportional to frequency”. The latter holds (exactly) in PFT in the preferred frame only. From Eq. (53) one derives the momentum of photon: | (54) |
identical with that predicted by STR. It turns out that, unlike energy, momentum does not depend on the direction of emission (is isotropic). Concluding: As in the case with massive particles, the photon is subject to the “energy-momentum disparity” and the relevant “asymmetry of energy distribution”. In general, PFT is not exactly equivalent to STR in the predictions regarding energy.9. Difference between the STR and PFT predictions as to energy “in practice”It is a matter of reasonable presumption (at least until better arguments for or against are provided) that physically preferred frame coincides with the cosmologically preferred frame, i.e. the one described by the exactly isotropic radiation of the cosmic microwave background (CMB). In the theoretically more general but observationally less helpful terms, the preferred frame is the one described by the FLRW metric. Eventually, one could identify the preferred frame with a hypothetic ubiquitous field endowed with fundamental properties, possibly connected with gravity.As is known from the relevant Doppler effect (known as “dipole pattern”), the velocity of Earth (taken together with Solar System) with respect to isotropic CMB amounts to ca. 370 km/s in a certain definite direction, which gives the value of absolute Lorentz factor  . Apart from this main source of absolute motion we should take into account the orbital motion of Earth with the relative velocity
. Apart from this main source of absolute motion we should take into account the orbital motion of Earth with the relative velocity  30 km/s, yielding the difference in absolute Lorentz factors
30 km/s, yielding the difference in absolute Lorentz factors  , and the rotational motion of Earth, on the average much less than 1km/s, yielding respective difference
, and the rotational motion of Earth, on the average much less than 1km/s, yielding respective difference  . These values, combined with each other, as well as with different orientation in space of experimental devices (e.g. linacs), should be compared with the “basic” Lorentz factors gained by the particles accelerated in experiments. They depend on the type of matter particle and on the power and size of accelerator; yet we may assume that extreme values vary between
. These values, combined with each other, as well as with different orientation in space of experimental devices (e.g. linacs), should be compared with the “basic” Lorentz factors gained by the particles accelerated in experiments. They depend on the type of matter particle and on the power and size of accelerator; yet we may assume that extreme values vary between  (for protons) and
(for protons) and  (for electrons). This shows difficulties, or even impossibility, in settling between STR and PFT in “usual” experiments concerning energy. Fortunately, at least in the part concerning the question of validity of STR, this goal can be achieved by pure logic, as shown in Part I. However, as it many times happened in the past, even very faint effects may not surpass the capability of experiments specially aimed for that purpose.10. Back to the elevator: description according to PFTThe case discussed in Part I may have various options when described according to PFT, due to different location of rails, elevator and observer with respect to the preferred frame. However, there is no need to consider them in large number; few characteristic examples will do just fine. More important are the general rules concerning length contraction, different from those appropriate for STR. The main difference is the fact that the primal source of length contraction and time dilation is the absolute (hence not relative) motion. Specifically the PFT rules are: 1) length contraction of an object in absolute motion is a real physical effect; it occurs always in line of this motion; 2) Inertial, absolutely moving observer (inertial frame) equipped with measuring rods undergoes the length contraction on the same footing as the observed object; 3) Contraction of the observer’s measuring rods superimposes on contraction of the observed object yielding the final effect in the observer’s reference frame. In particular, contraction of the measuring rod at rest in observer’s frame results in an adequate elongation of the observed object in the direction of the absolute motion of observer. (The same pertains to clocks and time dilation.) Below, we shall adhere to these rules.Let us first consider the case analogous to the one discussed in Part I; however now
(for electrons). This shows difficulties, or even impossibility, in settling between STR and PFT in “usual” experiments concerning energy. Fortunately, at least in the part concerning the question of validity of STR, this goal can be achieved by pure logic, as shown in Part I. However, as it many times happened in the past, even very faint effects may not surpass the capability of experiments specially aimed for that purpose.10. Back to the elevator: description according to PFTThe case discussed in Part I may have various options when described according to PFT, due to different location of rails, elevator and observer with respect to the preferred frame. However, there is no need to consider them in large number; few characteristic examples will do just fine. More important are the general rules concerning length contraction, different from those appropriate for STR. The main difference is the fact that the primal source of length contraction and time dilation is the absolute (hence not relative) motion. Specifically the PFT rules are: 1) length contraction of an object in absolute motion is a real physical effect; it occurs always in line of this motion; 2) Inertial, absolutely moving observer (inertial frame) equipped with measuring rods undergoes the length contraction on the same footing as the observed object; 3) Contraction of the observer’s measuring rods superimposes on contraction of the observed object yielding the final effect in the observer’s reference frame. In particular, contraction of the measuring rod at rest in observer’s frame results in an adequate elongation of the observed object in the direction of the absolute motion of observer. (The same pertains to clocks and time dilation.) Below, we shall adhere to these rules.Let us first consider the case analogous to the one discussed in Part I; however now  will be defined as the preferred frame. The vertical rails are at rest in
will be defined as the preferred frame. The vertical rails are at rest in  , the elevator, at rest in
, the elevator, at rest in  , moves in
, moves in  with velocity V, and frame
with velocity V, and frame  moves to the right perpendicularly to the rails with velocity u, exactly as shown in Fig. 2. While the elevator matches the rails in
moves to the right perpendicularly to the rails with velocity u, exactly as shown in Fig. 2. While the elevator matches the rails in  and In
and In , the question is if it does the same in
, the question is if it does the same in  , i.e. whether the observations in
, i.e. whether the observations in  ,
,  and
and  are mutually compatible. (We could, of course, consider also the cases in which the elevator does not match the rails in all three frames; however, for obvious reasons, the “well operating” elevator provides us with the more conclusive examples.)Because the elevator moves in
are mutually compatible. (We could, of course, consider also the cases in which the elevator does not match the rails in all three frames; however, for obvious reasons, the “well operating” elevator provides us with the more conclusive examples.)Because the elevator moves in  in vertical direction, so contraction takes place in this very direction, i.e. perpendicularly to vector u. In consequence, contraction in
in vertical direction, so contraction takes place in this very direction, i.e. perpendicularly to vector u. In consequence, contraction in  becomes preserved in
becomes preserved in  . Instead, contraction of the frame
. Instead, contraction of the frame  superimposes on that primal contraction. Any horizontal (parallel to u) measuring rod at rest in
superimposes on that primal contraction. Any horizontal (parallel to u) measuring rod at rest in  becomes contracted by the Lorentz factor
becomes contracted by the Lorentz factor  . This, of course, is not perceived directly in
. This, of course, is not perceived directly in  , but just in result of that the elevator, together with rails, undergoes in
, but just in result of that the elevator, together with rails, undergoes in  an adequate elongation in the horizontal direction. Finally, despite the difference in proportions in the frames compared among themselves, elevator and rails match each other in frame
an adequate elongation in the horizontal direction. Finally, despite the difference in proportions in the frames compared among themselves, elevator and rails match each other in frame  just like they do in frames
just like they do in frames  and
and  (Fig. 10).
(Fig. 10).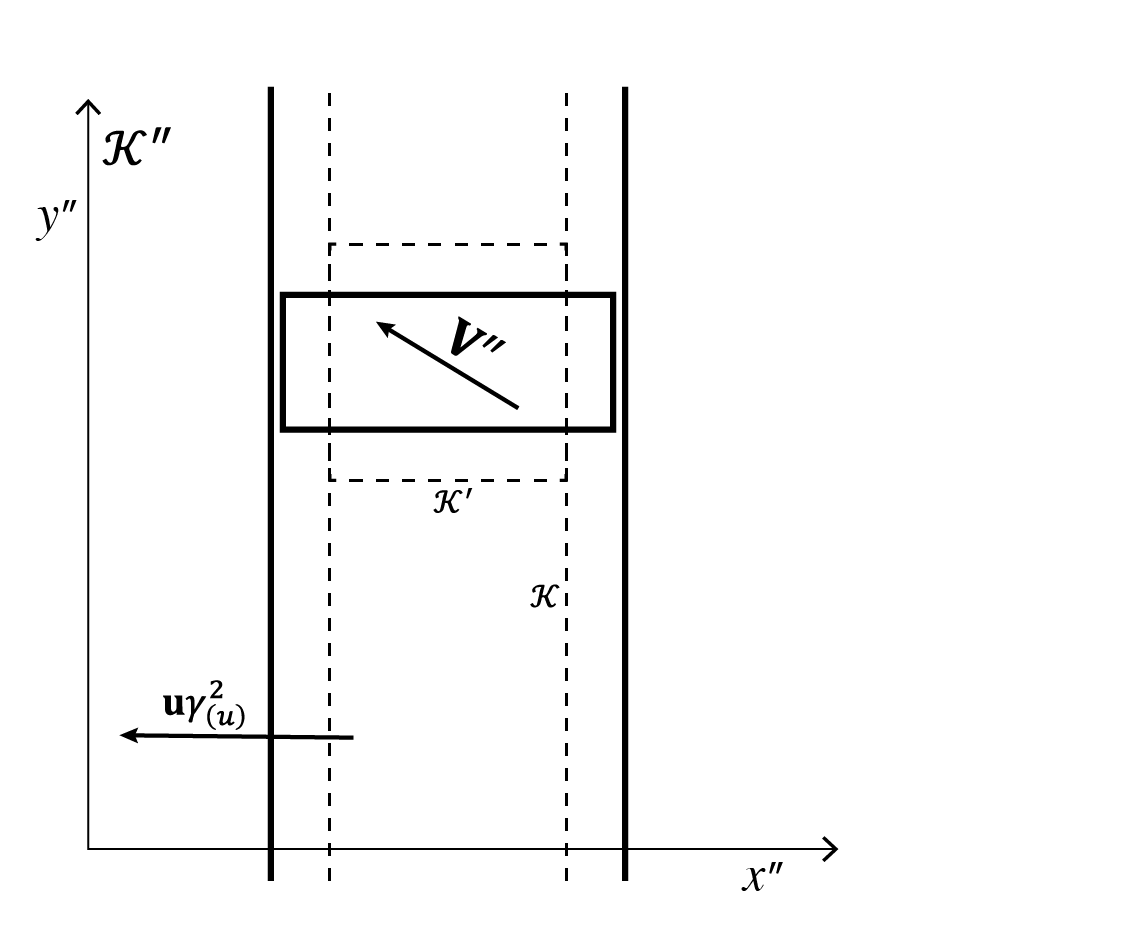 | Figure 10. The rails (at rest in  ), elevator (at rest in ), elevator (at rest in  ), both observed in ), both observed in  . In frame . In frame  elevator and rails match each other just like they do in elevator and rails match each other just like they do in . Interpreting the length contraction in terms of real effect caused by absolute motion ensures compatibility between observations performed in . Interpreting the length contraction in terms of real effect caused by absolute motion ensures compatibility between observations performed in  and and  |
Consider now another example. Let an ultimate observer’s frame be the preferred frame  . Let
. Let  , now being the rest frame for vertical rails, move to the right with velocity u. Let
, now being the rest frame for vertical rails, move to the right with velocity u. Let  be the rest frame for the elevator moving upwards in
be the rest frame for the elevator moving upwards in  with velocity
with velocity  . (Notice that frame
. (Notice that frame  is now different from
is now different from  in previous example.) From the viewpoint of
in previous example.) From the viewpoint of  , frame
, frame  moves to the left with velocity
moves to the left with velocity  (Fig. 11).As observed in
(Fig. 11).As observed in  , the elevator (generally, frame
, the elevator (generally, frame  ) moves in the diagonal direction, from bottom left to top right, with a certain resultant velocity V, related to u and
) moves in the diagonal direction, from bottom left to top right, with a certain resultant velocity V, related to u and  . The motion with respect to
. The motion with respect to  is the absolute motion; hence elevator undergoes the (real) length contraction along the diagonal direction parallel to vector V. Seemingly, it looks to be a contradiction, similar to that revealed in Part I. But it is not; looks can be deceiving. The elevator is indeed contracted in
is the absolute motion; hence elevator undergoes the (real) length contraction along the diagonal direction parallel to vector V. Seemingly, it looks to be a contradiction, similar to that revealed in Part I. But it is not; looks can be deceiving. The elevator is indeed contracted in  in the diagonal direction; however, this only means that if this elevator (i.e. the one moving upwards in
in the diagonal direction; however, this only means that if this elevator (i.e. the one moving upwards in  ) would move upwards (or stay at rest) in frame
) would move upwards (or stay at rest) in frame  , then its shape in
, then its shape in  would be rhomboidal, not rectangular. Observer
would be rhomboidal, not rectangular. Observer  should take this into account once received an order from the observer
should take this into account once received an order from the observer  for making an elevator well-operating in
for making an elevator well-operating in  ! The elongated rhomboidal elevator undergoes in
! The elongated rhomboidal elevator undergoes in  the length contraction in line of its diagonal motion in this frame, as a result of which it takes the shape of a rectangle in
the length contraction in line of its diagonal motion in this frame, as a result of which it takes the shape of a rectangle in  (granted that its rhomboidal shape was properly matched in
(granted that its rhomboidal shape was properly matched in  ). At the same time, distance between the rails becomes contracted in
). At the same time, distance between the rails becomes contracted in  in the horizontal direction. Consequently, if elevator and rails fit together in
in the horizontal direction. Consequently, if elevator and rails fit together in  they also fit together in frame
they also fit together in frame  . In general, compatibility between respective observations follows from the fact that, according to PFT, contraction is a real physical effect resulting from the absolute motion (Fig. 12).
. In general, compatibility between respective observations follows from the fact that, according to PFT, contraction is a real physical effect resulting from the absolute motion (Fig. 12).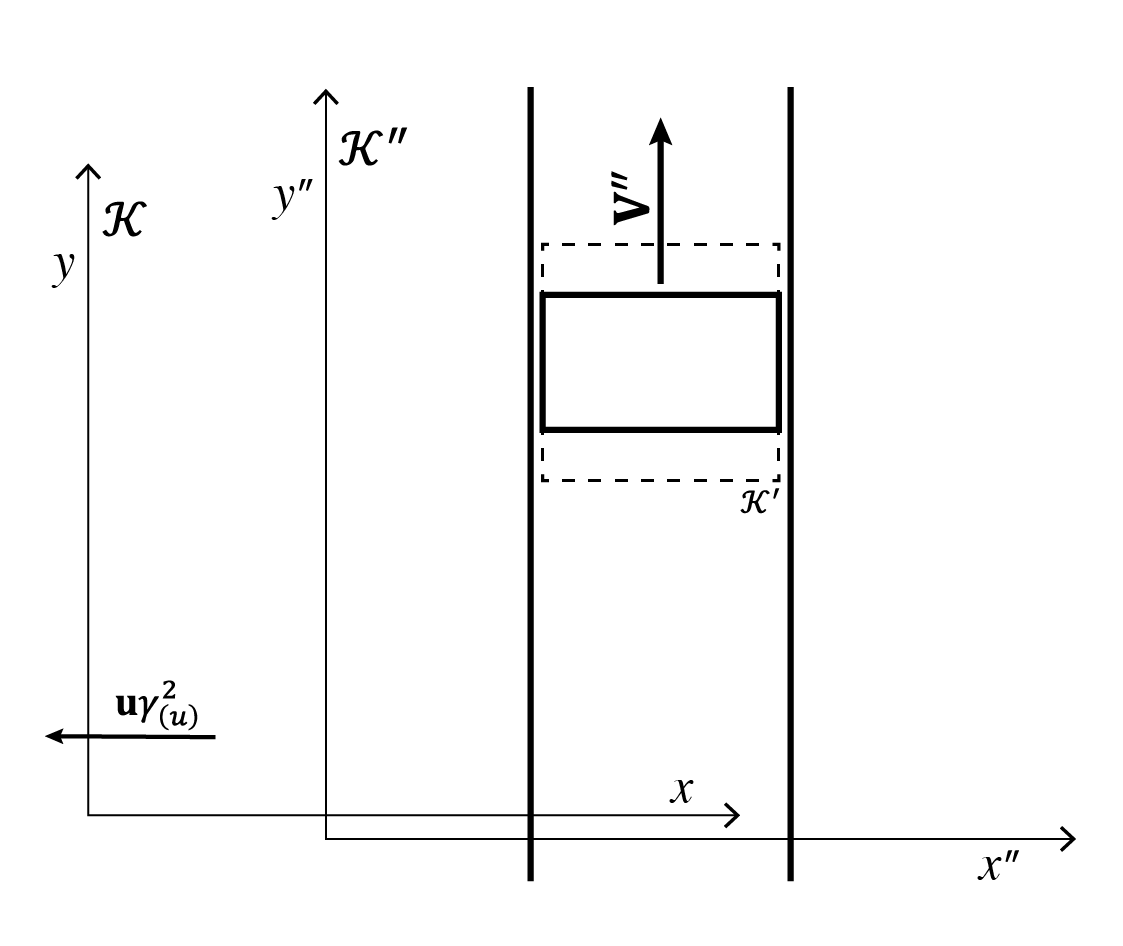 | Figure 11. Elevator (at rest in  ), rails (at rest in ), rails (at rest in  ) and frame ) and frame  moving to the left; all three observed in frame moving to the left; all three observed in frame  |
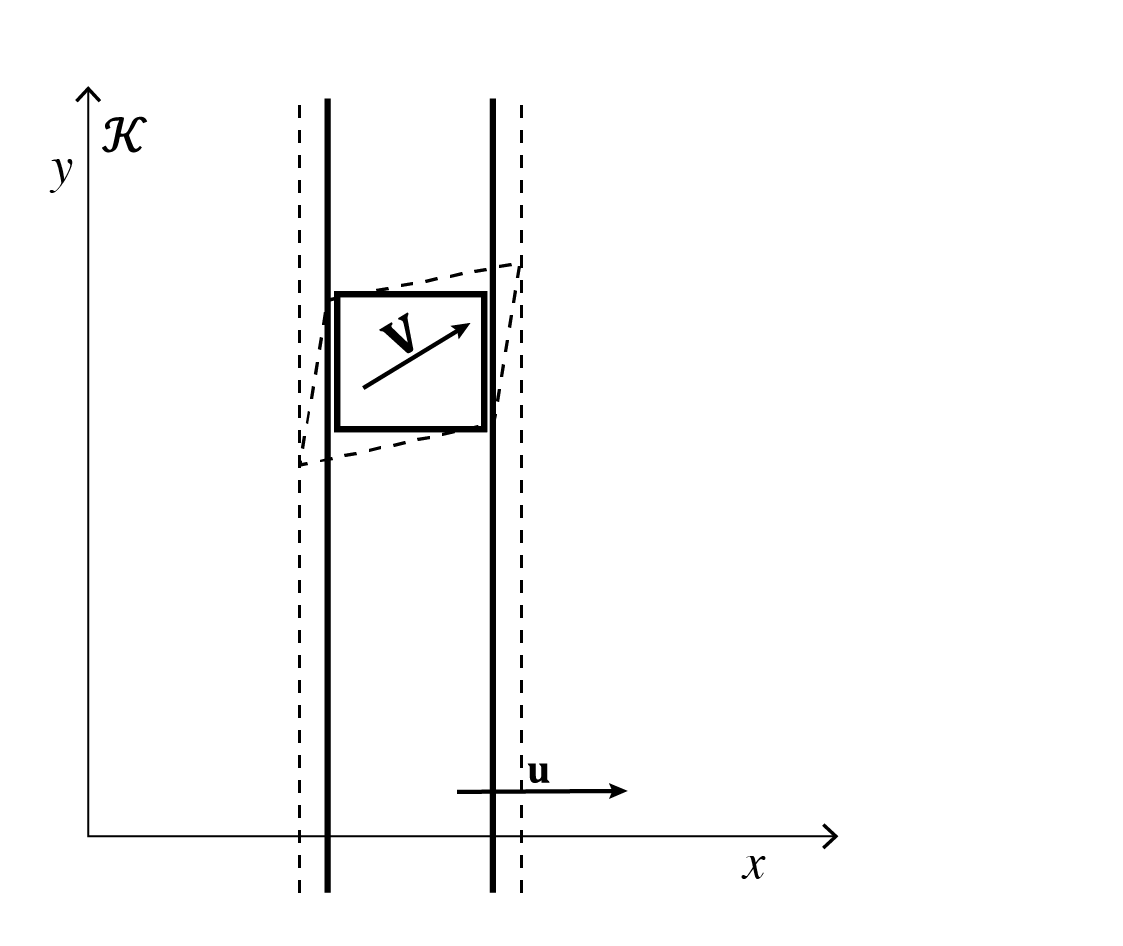 | Figure 12. The rails (at rest in  ), elevator (at rest in ), elevator (at rest in  ), both observed in frame ), both observed in frame  . Elevator reshapes in . Elevator reshapes in  from rhomboid to rectangle; in result, elevator and rails match each other in from rhomboid to rectangle; in result, elevator and rails match each other in  just like they do in just like they do in  . The dashed line depicts the shapes of elevator and of rails as if they were at rest in . The dashed line depicts the shapes of elevator and of rails as if they were at rest in  |
Let us stay at the above arrangement. Consider now observations made by observer  traveling, say, inside the elevator. The elevator is contracted in
traveling, say, inside the elevator. The elevator is contracted in  from the rhomboid to rectangle; however, observer
from the rhomboid to rectangle; however, observer  does not observe this effect directly, still perceiving elevator as rhomboidal. This fact, obvious for STR, is obvious for PFT either, considering that length contraction (as well as time dilation) affects all objects at rest in a given system, conventionally described as measuring rods and clocks.How then the rhomboidal shape of elevator agrees with vertical rails in
does not observe this effect directly, still perceiving elevator as rhomboidal. This fact, obvious for STR, is obvious for PFT either, considering that length contraction (as well as time dilation) affects all objects at rest in a given system, conventionally described as measuring rods and clocks.How then the rhomboidal shape of elevator agrees with vertical rails in  and
and  ? The measuring rods at rest in
? The measuring rods at rest in  are contracted in
are contracted in  by the Lorentz factor
by the Lorentz factor  , in the diagonal direction parallel to V. Hence, all objects observed in
, in the diagonal direction parallel to V. Hence, all objects observed in  are elongated in this very direction (compared with respective lengths measured in
are elongated in this very direction (compared with respective lengths measured in  ), including the objects at rest in
), including the objects at rest in  . Consequently, the rails, (already contracted in
. Consequently, the rails, (already contracted in  in the horizontal direction), become elongated in
in the horizontal direction), become elongated in  in the direction parallel to the diagonal vector V. Imagine a rectangle formed by vertical rails at rest in
in the direction parallel to the diagonal vector V. Imagine a rectangle formed by vertical rails at rest in  intersected by two horizontal (in
intersected by two horizontal (in  ) lines, e.g. the rectangular cage tightly framing the elevator. This rectangle becomes elongated in
) lines, e.g. the rectangular cage tightly framing the elevator. This rectangle becomes elongated in  to the shape of rhomboid in the direction of vector V. Of course, this pertains not only to this particular rectangle, but to all others and, in consequence, to the entire rails that due to this elongation become skewed in frame
to the shape of rhomboid in the direction of vector V. Of course, this pertains not only to this particular rectangle, but to all others and, in consequence, to the entire rails that due to this elongation become skewed in frame  , in the direction parallel to the skewed vertical sides of elevator. Hence, elevator and rails match each other in
, in the direction parallel to the skewed vertical sides of elevator. Hence, elevator and rails match each other in  , just as they do in
, just as they do in  and
and  (Fig. 13).
(Fig. 13).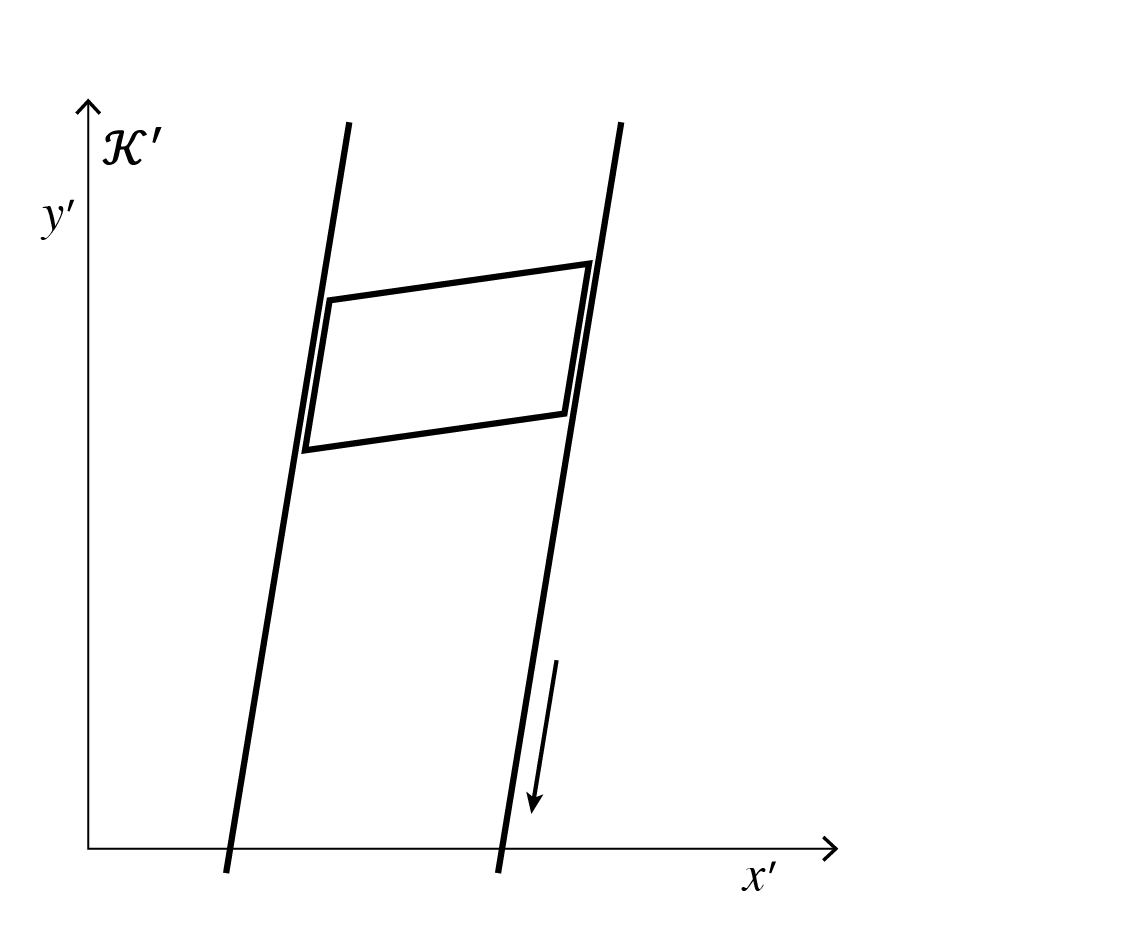 | Figure 13. The rails (at rest in  ), elevator (at rest in ), elevator (at rest in  ), both observed in frame ), both observed in frame  . Elevator and rails subject to the elongation in diagonal direction, parallel to the direction of the elevator motion in . Elevator and rails subject to the elongation in diagonal direction, parallel to the direction of the elevator motion in  . In result, rhomboidal elevator matches the tilted rails, which indicates the compatibility of observations made in . In result, rhomboidal elevator matches the tilted rails, which indicates the compatibility of observations made in  with observations made in with observations made in  and and  |
Let us conclude: The above representative examples show that the elevator-shaft paradox can be resolved in a self-consistent way if, and only if, contraction is interpreted as an absolute effect, caused by the absolute motion, in accordance with the Preferred Frame Theory and respective Tangherlini transformation.
4. Conclusions
The evidence of inconsistency taken in the thought experiment (Part I) leaves no doubt that Special Theory of Relativity should be replaced by a different theory. Likewise, the arguments presented in Part II, despite their elementary form, speak in favour of the Preferred Frame Theory as the right alternative. The elevator-shaft paradox shows that this is only the length contraction (i.e. the effect manifesting itself at the velocities comparable with the speed of light) that enables settling an old controversy as to the absolute vs. relative nature of motion, dated from Newton and Leibniz. In terms of logic, Special Relativity originated from two basic postulates translated into algebraic form of Lorentz transformation. Over time, STR gained however advanced mathematical shape, to mention “hyperbolic” Minkowski geometry, matrix algebra and group theory. Consequently, it should be possible to disprove STR using more advanced tools than the ones used in this paper. It is likely that, in accordance with the spirit of Einstein’s remark [9], STR is self-consistent as a mathematical structure applicable to the toy model of physical reality reduced to a single one spatial dimension, but not adequate as a description of the real three-dimensional world embedded in time. In connection with that claim, it has to be examined whether the non-collinear Lorentz transformations form a group as they do in the collinear case. The failure of STR breaks the present consent in physics as to the basic correctness of both relativity theory and quantum mechanics. This can be (and really is, as this author could find out) considered disastrous, considering that Einstein’s theory makes a foundation of modern physics. However, this consent does not include the main unsolved problem in modern physics which is the lacking theory of quantum gravity, in fact tantamount with the split of physics as a whole. Revealing the STR inconsistency should be therefore perceived as a challenge and chance in opening up the new prospects for physics at the fundamental level. As vividly pointed out by Magueijo [20]) the quantum-gravity effects, whatever they are, should be absolute, ergo independent of the choice of reference frame. This disagrees with STR, according to which velocity (and consequently total energy) is always relative, i.e. depends on the choice of reference frame. In contrast to that, PFT predicts that particular energies are basically related to the absolute velocities. Although specific values of energy still depend in PFT on the absolute velocity of observer, yet, in any particular reference frame they form an invariant hierarchy. Consequently, energy perceived in a given frame as extreme (in the sense of expected quantum effects) is as well extreme in any other frame. This property of PFT provides dramatical change to all present models aimed at searching for the spontaneous Lorentz violation in Planck scale; thereby may appear crucial for solving the problem of quantum gravity.
References
| [1] | FitzGerald, G. F. (1889) The Ether and Earth’s Atmosphere, Science 13, 390. |
| [2] | Lorentz, H. A. (1892) The Relative Motion of the Earth and Ether, in: Collected Papers, Vol. IV (the Hague, 1937) 219-223. |
| [3] | Larmor, J. (1900) “Aether and Matter” Cambridge University Press. |
| [4] | Lorentz, H. A. (1899) Simplified Theory of Electrical and Optical Phenomena in Moving Bodies, Proceedings of the Royal Netherlands Academy of Arts and Science, 1, 427-442. |
| [5] | Poincare, H. (1905) On the Dynamics of Electron, Comptes Rendus, 140, 1504-1508. |
| [6] | Einstein, A. (1905) On the Electrodynamics of Moving Bodies, Annalen der Physik 17, 891. |
| [7] | Taylor, E. F., Wheeler, J. A. (1966) “Spacetime physics”, W.H. Freeman and Co., San Francisco & London. |
| [8] | Minkowski, H. (1908) Raum und Zeit, Physikalische Zeitschrift, 10, 75-88. |
| [9] | https://www.brainyquote.com/quotes/albert_einstein_102390 |
| [10] | Barr, S. M. (2019) author’s private correspondence. |
| [11] | Praszałowicz M. (2019), author’s correspondence with Editor in Chief of Acta Physica Polonica B. |
| [12] | Thomas, L. H. (1926) Motion of the spinning electron, Nature, 117 (2945), 514. |
| [13] | Tangherlini, F. R. (1961) Nuovo Cimento Suppl. 20, 351. |
| [14] | Reichenbach, H. (1930) “The philosophy of space and time” Dover, New York. |
| [15] | Selleri, F. (1996) Noninvariant One-way Velocity of Light, Foundations of Physics, 26 (5), 641-664. |
| [16] | Selleri, F. (2004) Recovering the Lorentz Ether, Apeiron, 11, 1, 246-281. |
| [17] | Mansouri, R., Sexl, R. U. (1977) A Test Theory of Special Relativity I: Simultaneity and Clock Synchronization, General Relativity and Gravitation, 8 (7), 297-513. |
| [18] | a. Rybicki, M. (2016) Mansouri-Sexl Theory: The Question of Equivalence between Special Relativity and Ether Theories, Progress in Physics, 12 (1), 89-92. b. Rybicki, M. (2016) Errata to “The Question of Equivalence between Special Relativity and Ether Theories”, Progress in Physics, 12 (3), 204. |
| [19] | Rybicki, M. (2010) Inertial Transformation Extended to the General Case, Galilean Electrodynamics, 21 (1), 8-11. |
| [20] | Magueijo, J. (2003) “Faster than the speed of light”, Perseus Books L.L.C. |

 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTML