Kaushik Padmanabhan 1, Ilango Jeyasubramanian 2, Jagadish Saravanan Pandian 3, Jai Vignesh Rajendran 4
1Electrical and Computer Engineering, Northeastern University, Boston, US
2Electrical Engineering, University of Texas at Dallas, Dallas, US
3Electrical Engineering, Wayne State University, Detroit, US
4Associate Developer, SAP Labs India Inc., Bengaluru, India
Correspondence to: Kaushik Padmanabhan , Electrical and Computer Engineering, Northeastern University, Boston, US.
| Email: |  |
Copyright © 2016 Scientific & Academic Publishing. All Rights Reserved.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

Abstract
Vehicle platoons are found to have various advantages in which vehicles are following one behind the other by maintaining a limited distance between them. In order to maintain network connectivity in a heavy traffic, these platoon vehicles will form multiple clusters with the surrounding vehicles using Vehicular Ad-hoc Network (VANET). In this paper, a novel dynamic multi-clustering technique is presented which adapt to the dynamics of the platoon under traffic disturbance. The nodes are clustered as a main single clustered platoon in a hierarchical manner under the scope of Vehicle to Vehicle (V2V) communications. However, we found that the current vehicle disturbance adaptive technique with single clustering of mobile vehicle nodes provides a low quality of service. It also does not provide much adaptation to interrupting traffic between Platoon member vehicles. Our algorithm is a hierarchical clustering based scheme, which forms the dynamic multi-clusters within a platoon and improves the reliability. The number of clusters is optimized by making the decision from Relative Multi-Head Disturbance Adaptation (RMDA) value of the nodes. These multi-clusters are established depending on the non-platoon vehicles’ movement. The proposed algorithm is analyzed by considering two modules for cluster establishment, one with the non-platoon vehicles having stable relative mobility with respect to their platoon vehicles and other with unstable relative mobility. The QoS criteria, which are improved through the technique are packet delay, throughput and packet loss ratio. Simulation results demonstrate that the proposed work presents better results than the current vehicle disturbance adaptive technique.
Keywords:
Vehicular Ad-hoc Network, Clustering, Quality of Service (QoS), Disturbance adaption, Vehicular platoon
Cite this paper: Kaushik Padmanabhan , Ilango Jeyasubramanian , Jagadish Saravanan Pandian , Jai Vignesh Rajendran , Improving QoS in VANET Using Dynamic Clustering Technique, International Journal of Networks and Communications, Vol. 6 No. 4, 2016, pp. 72-79. doi: 10.5923/j.ijnc.20160604.02.
1. Introduction
Vehicle platoons, i.e. the vehicles following one behind another, using Vehicular Ad-hoc Network in highways are found to have various advantages. They improve fuel-efficiency by reducing air-drag, road capacity can be increased, and traffic congestion may get improved. In this literature, we will discuss the existing disturbance adaptive technique in a platoon as per [1] which specifies a different driving strategy which manages the intra-spacing gap between the platoon members, alteration of the platoon size, with a sudden decrease in the speed of the leader vehicle from its stable velocity for a particular time period. In general, a vehicle platoon will comprise of leader, relay, tail, and members as a single-cluster in VANET. The leader is the leading vehicle in the platoon. It is responsible for creating and managing the platoon. The tail vehicle is located at the end of a platoon. It is responsible for communicating with the following vehicles, especially the leader of the next platoon. The relay vehicles act as data-forwarding nodes in a multi hop VANET environment. Other vehicles are normal vehicles that receive information from the relay node. Although many works have been carried over to improve the application of VANET for platoon, still there are many issues to be solved in order to improve the performance of the networks, when used in dynamic traffic environment. The VANET QoS parameters will be affected due to vehicle disturbances, variation in traffic density etc. because the platoon dynamics will be varying. For example, due to the disturbances of the other vehicles, the speed of the platoon vehicles may vary at a different rate which will results in the variation of inter-vehicle distance. If the distance between the vehicles increases, then this may lead to splitting of network if the inter-vehicle distance exceeds the transmission range, which in turn decrease the network QoS parameters like packet loss ratio and delay etc. Though maintaining stable platoon save fuel consumption and decrease the exhaust emissions significantly, but it is very difficult in real time with dynamic traffic pattern. i.e. many number of non-platoon vehicle cause the disturbance by varying the speed of the platoon vehicles. So it is desirable to use the VANET technology to overcome such problems and the particular above mentioned issue can be solved through incorporating adaptive clustering technique like one presented in this paper.Clustering refer to grouping of nodes in a hierarchical manner and improve the energy efficiency in the ad hoc network. Each cluster should be different from other clusters, i.e., nodes belonging to one cluster should not overlap with the nodes of other clusters. Clustering can be done using various kinds of algorithms. Clustering could be hard or fuzzy. In hard clustering algorithm, each node in the traffic belongs to a single cluster during its operation; however, in fuzzy clustering method, a degree of membership is assigned to each node depending on its degree of association to several other clusters. It is also possible to convert a fuzzy clustering to a hard clustering by associating each node to the cluster with the highest membership. The existing single cluster formation depends on various algorithms. A clustering algorithm includes two technical parts, cluster establishment and cluster maintenance. In cluster establishment, we need to identify the task (CH, CG, or CM) of each node in the network. The election of CHs is a core technique. An efficient clustering algorithm should adapt to the nature of disturbance take care of the performance metrics.
2. Related Works
We initially describe about the platoon movement in the heavy traffic area. Generally, the vehicular platoon, i.e. the vehicles following one behind another, is used to increase the fuel efficiency by reducing the air-drag. The platoon must vary in size according to the surrounding traffic. In the existing disturbance adaption paper [1], the platoon manages the disturbance by increasing or reducing the platoon size while traversing through the traffic. Since the platoon involves a single cluster, it involves a car following model wherein any non-platoon vehicle that acts as a disturbance must obey the Master node and follow the platoon members accordingly. This single cluster is formed from several algorithms with respect to the ID, Relative Mobility and the position of nodes. We introduce some known clustering algorithms based on ID and degree of nodes like Lowest ID (LID) [4] which elects a node with the smallest ID as a Master node. This approach is feasible as it relies only on the ID but may cause several re-clustering and small-size clusters which acts as the disadvantage. Then we go onto HCC (High Connectivity Clustering) [4] which elects a node with the highest degree value as a Master node. Here the re-clustering is minimum, so the cost of maintaining the cluster is comparatively low than LID but this approach is more unstable to node mobility. LCC (Least Master Node Change) [8] improves LID and HCC on broadcast overheads due to re-clustering. MMDA (Max-Min D-hop clustering Algorithm) [5] and RCC (Random Competition based clustering) [6] use a contest method to elect Master nodes. Weighted Clustering Algorithm (WCA) [7] elects a node based on the number of neighbours as a Master node, and Connectivity, Energy and Mobility driven Clustering Algorithm (CEMCA) [10] consider several factors such as ID, mobility, node degree, location and power level for electing the Master node. Then we move onto election criteria based on relative mobility wherein [9], we can see that the MOBIC (MOBIlity metrics Clustering) makes use of relative mobility for Master node election among the dynamic nodes to improve the stability of clusters. Relative mobility refers to the change in position of one node with respect to a fixed other node. The distance between the two nodes is noted from the change in signal strength in this MOBIC algorithm. However, MOBIC is inaccurate and hence in order to improve the MOBIC algorithm, it is extended with DPP (Directional Propagation Protocol) [11], which extends MOBIC into vehicular environments. Here, two master nodes are selected at the head and tail of the cluster.Finally, a simple algorithm is designed and it is referred to as CPM (Centre Position and Mobility) from [15] which involves the calculation of the mean positions and velocities of the platoon members for Master node election. Here the member with the least CPM value is chosen as the Master node. Once the traffic level is high, the network connectivity gets reduced between the platoon members. Hence to avoid this, multi-head clustering technique is used so that the network connectivity is maintained. When these multi-head clusters are formed using CPM algorithm [2], the multiple Master nodes do not rely upon the relative distance between the nodes in the platoon which leads to the decline of the cooperation behaviour. Due to multi-head clusters within a single platoon, overlapping of cluster members occur between two multi-head clusters. When overlapping occurs among the cluster members between two clusters [3], the members choose to join the cluster with high beacon signal strength. In [2], the multi-head clusters are used only to share the data (uploading and downloading of multimedia files).
3. Existing Disturbance Adaptation Mechanism
The technique explained in [1] investigates the dynamics of a VANET enabled platoon under traffic commotion, which is a common scenario on a highway. The system considers that there is a traffic disturbance, when the leading vehicle of a platoon tries deceleration to a lower velocity “Vlow” from a stable velocity “Vstb” and then keep up this speed for a period of time before accelerating to the original speed. To address these disturbance issues, they investigate the VANET- enabled platoon’s dynamics. In particular, we first propound a novel disturbance adaptive platoon (DA-Platoon) architecture, which is used to define the DA-Platoon dynamic system. The DA-Platoon system includes a controller that shall consider both platoon dynamics and VANET requirements and also adapts to the disturbance scenario.They propose a novel DA-Platoon architecture in which they consider both traffic dynamics under traffic commotion and the constraints due to VANET communications. The Platoon then adapts to the traffic by reducing the Intra-vehicle spacing (spacing between vehicles in the same platoon), Inter-vehicle spacing (spacing between vehicles adjacent platoon) to reduce the platoon size (i.e. the length of the platoon), thus helps in reducing the traffic congestion. However, the existing system did not consider the adaption of platoon size, when there is interruption of Non-platoon members within the platoon. Even though in a single considered platoon, the cluster members will try sending the broadcast messages which can cause broadcast storm that can be reduced by means of [16]. To reduce the performance overheads within the cluster or platoon members, the vehicles need to communicate with the RSU as mentioned in [17], so that more overheads on the cluster head gets reduced. Hence, we made a novel Multi-head clustering in a hierarchical manner under the single platoon cluster to provide both effective adaptation at interrupting vehicle nodes, improve the cluster reliability and reduce the overheads.
4. Relative Multi-Head Disturbance Adaptation (RMDA) Algorithm
In our RMDA algorithm, we have considered both relative distance and mobility for clustering of nodes for our hierarchical clustering based scheme. At first the center position is calculated among the cluster members by involving Centre Position and Mobility algorithm as per equation (1) which follows. We measure the Relative Multi-Head Disturbance Adaptation (RMDA) depending on these concepts of center position and relative mobility of each mobile node in a sector as the criterion of Master node election. Each mobile node is supposed to continuously broadcast a beacon signal to its one-hop neighbors. This beacon signal carries information about the location and velocity of mobile node. From these periodic beacon signals, this issue can be solved through incorporating adaptive clustering technique like one presented in this paper. a node maintains a neighbor table that annals the mobility-related data of all its current one-hop neighbors (including the node itself). We have limited that the nodes move in a single direction as the cluster reliability decreases when dynamic directions are considered. This won’t be a problem as we are implementing this algorithm over the nodes in a single lane. The neighboring table information on each node will only have the information of nodes in the same direction. The information recorded for an ith node in general will have their position (xi, yi) and their velocity (vi), represented as (xi, yi, vi). It is assumed that the first record will be the current node’s own data.The RMDA value of a node is computed as the following steps:1) Initially, the Platoon members will exchange beacon messages about their position, speed and direction among them. 2) Through the beacon position information, the center coordinates are calculated from Center Position and Mobility algorithm, | (1) |
3) The node near the center coordinates is selected as the Relay vehicle. The Master node is made to use the relay vehicle for single platoon cluster communication.4) During the interruption of adjacent lane vehicles between the platoon members, through the beacon messages, we update the neighboring table information and use it to find the vehicle traffic around each platoon member.5) Based on traffic load, the main Master node separates the complete platoon into sectors.6) Within those sectors, multi-head clusters are formed.7) To form these multi-head clusters, election for Master node occurs.8) The Master node election initially involves the CPM algorithm as per the steps (1), (2) and (3).9) Then relative distance between the nodes in a sector and the central coordinates are calculated as, | (2) |
10) After calculating the relative distance, relative velocity has to be calculated. Hence, the median value of the velocities of the vehicles is calculated, | (3) |
11) Then the relative velocity is found for each vehicle’s velocity with respect to the central velocity, | (4) |
12) Then the Relative ratio which is between the relative distance of each node and the Maximum relative distance of the sector is calculated as: | (5) |
where k (weighting factor) = 0.6 13) The node with the minimum relative ratio is selected as the Master node for the corresponding sector.By this method, sector wise multi-head clustering is done hierarchically under the main platoon cluster. Rather than using the single cluster, we have used dynamic multi-head clusters which are formed hierarchically. These dynamic clusters have improved the efficiency by improving the QOS parameters (throughput, packet loss ratio and end to end delay). Fig. 1 shows the movement of a single platoon-cluster P1 with an intra-platoon spacing as D. Fig. 2 shows the movement of that platoon traversing through the heavy traffic. Hence the platoon undergoes disturbance management by including multi-head clusters within the platoon as per Fig. 3. By this any vehicle that comes in between the platoon members will align with the platoon members with same intra-platoon spacing as D.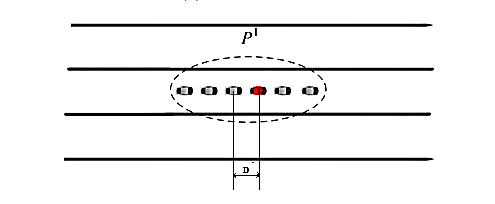 | Figure 1. Single Cluster Platoon |
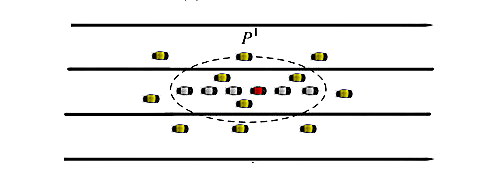 | Figure 2. Movement of platoon members in the heavy traffic |
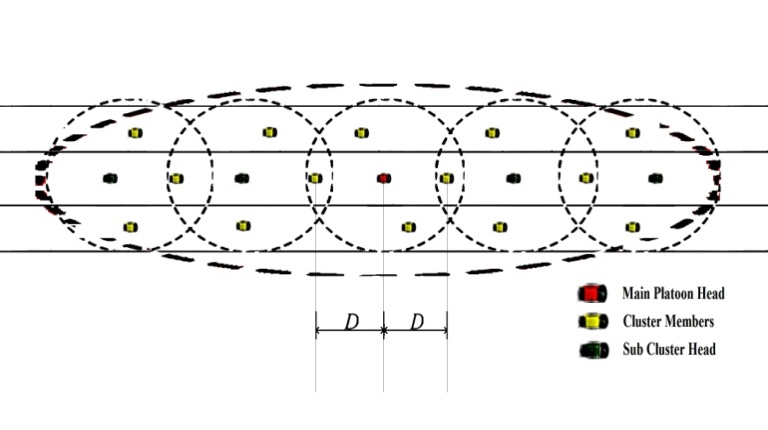 | Figure 3. Hierarchical multi-head cluster formation |
5. Case Study
5.1. CASE-1: Platoon and Non-platoon Members with Stable Relative Mobility
In our first module of cluster establishment, we have considered a platoon of five vehicles which form a single cluster with a Master node as relay vehicle, a master vehicle, a tail vehicle and other platoon members. Here, we considered a number of non-platoon vehicles that act as the disturbance for the platoon vehicles. In this module, the non-platoon vehicles have stable relative mobility with respect to their platoon vehicles. Hence, the main platoon Master node splits the total cluster region into sectors of sub-clusters with a sub-Master node in each sector. Within these sectors, the election of the Master nodes is done by using the same RMDA algorithm, but with the relative mobility value as zero.Then the RMDA value will be calculated as: | (6) |
5.2. CASE-2: Platoon and Non-platoon Members with Unstable Relative Mobility
In the above module, we have assumed the non-platoon vehicles have stable relative mobility (stable velocity) with respect to their platoon vehicles. However, there exists some non-zero relative mobility (variable velocity) while the platoon traverses through the traffic. Hence, in this module we have considered the non-platoon vehicles to have unstable relative mobility with respect to their platoon vehicles. Since the non-platoon vehicles with variable velocity move in and out of the sectors, there is a demand for dynamic clustering among the sectors within a platoon. Hence, the Multi-Master node election will be done by the RMDA algorithm by using both Relative distance and Relative mobility.The RMDA value is calculated in this case as: | (7) |
6. Simulation
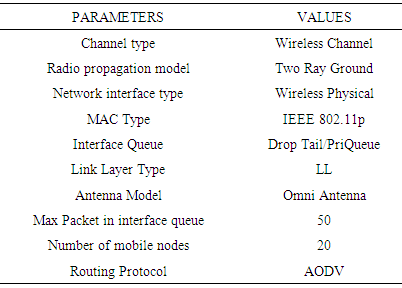
In this section, we conduct simulations and present the results to support our theoretical conclusions. In all simulations, the transmission range is set to 100 meters. In this experiment, we generate 30 vehicles that run according to our mobility model on a sufficiently large region with one traffic influx. Table 1. Simulation Parameters
 |
| |
|
6.1. Simulation Scenario
Fig.4 represents the existing system maintaining a fixed intra-platoon spacing (Spacing between the same Platoon members) for a platoon with 5 members represented by nodes 15 – 19 moving at a fixed speed of 20.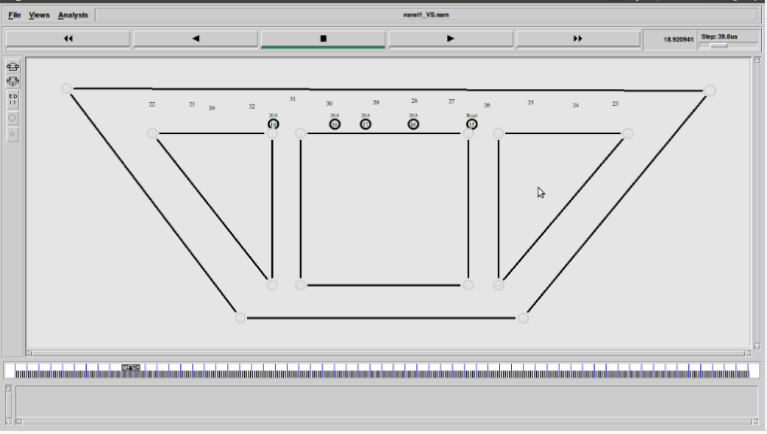 | Figure 4. VANET enabled vehicle Platoon |
The fixed intra-platoon spacing is made to reduce when the head node 15 reduces its speed from 20 during traffic disturbance to reduce traffic congestion.In Fig. 5(a), we can see a node 20 interrupting between the platoon nodes 18 and 19. This node 20 is considered to be a non-platoon vehicle which act as a disturbance for the platoon members 18 and 19. Initially this node will be indicated in red color as it has not undergone any clustering with the platoon members. Immediately from Fig. 5(b), we can see the nodes 15 – 18 increases its speed from 20 to 22 and the node 19 decreases its speed from 20 to 19 in order to maintain a fixed spacing between the interrupting node 20 and the adjacent platoon nodes 18 and 19. In Fig. 5(c), the disturbance node 20 has finally been aligned with the platoon members at a corrected spacing.Also, to improve the reliability of the system, we made a sector wise Multi-head clustering in a hierarchical manner under the single platoon cluster by using RMDA algorithm as specified in Section 4. When considering real-time conditions, the non-platoon members will always be varying their velocity in a traffic scenario. Hence, a periodic dynamic re-election of multi-head cluster is made to change the cluster membership of vehicle nodes according to the node position.We can note that node 31 in earlier figures, Fig. 4 and Fig. 5, was at the first cluster represented by yellow color.Then, in Fig. 6, with change in its position as it travels at a speed of 25 when compared to platoon nodes speed 20, it changes its cluster membership to the second cluster represented by blue color.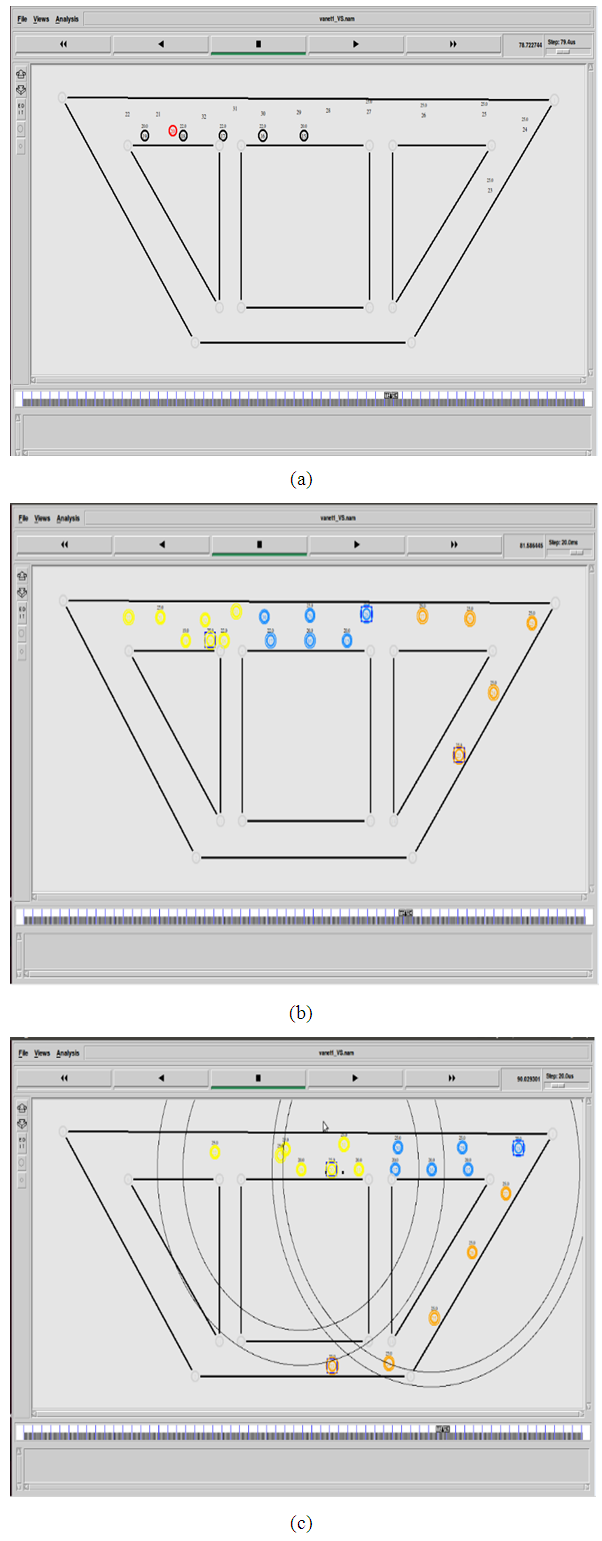 | Figure 5. (a) Interruption of vehicle inside the platoon (b) Correcting the spacing after the interrupted vehicle. (c) Corrected spacing |
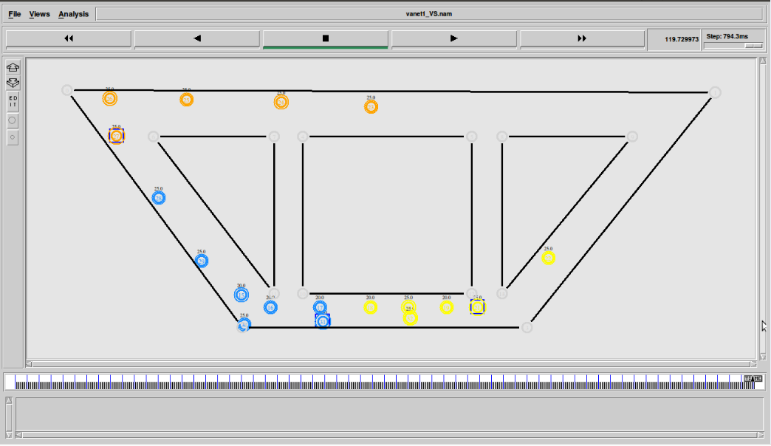 | Figure 6. Dynamic Multi-head hierarchical Clustering |
6.2. Simulation Results
Quality of Service (QoS) is the capability of a network to give a better service to selected network traffic over various kinds of technologies. QoS parameters are calculated to determine the reliability of the communication within the network. Simulation results involve the measurement of QoS parameters like throughput, packet loss ratio and end to end delay. These measurements determine the efficiency and reliability of our proposed algorithm, i.e. Relative Multi-Head Disturbance Adaptation (RMDA) algorithm.
6.2.1. Throughput Measurement
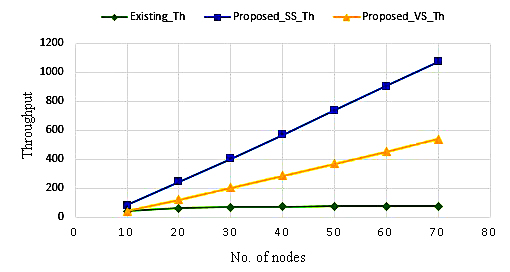 | Figure 7. Graph between Throughput Vs No. of nodes |
6.2.2. Packet Loss Ratio Measurement
Packet loss occurs as one or more packets of data fail to reach their destination while travelling across a network.Fig. 8 represents the packet loss ratio comparison between the existing system and our proposed model. The packet loss ratio is more in the existing system since the existing system comprises of only one cluster, the bandwidth efficiency is decreased. When the number of vehicles in a cluster has increased, the broadcast messages to the Master node will also increase simultaneously. This causes broadcast storm within that single cluster, i.e., when one set of vehicles in the cluster are broadcasting data over the network, and the other set will rebroadcast the data back to the network which will create a flood of data within the cluster. This broadcast storm will lead to congestion and further the packets are dropped by the Master node. This leads to more packet loss ratio in the existing system. The loss also occurs due to long distance propagation of waves while the number of nodes increases in the main cluster. But in our proposed model, rather than using the single cluster, we have introduced hierarchical multi-head clusters within the main platoon-cluster, which has controlled the congestion caused due to the broadcast storm. This ultimately has reduced the packet loss ratio.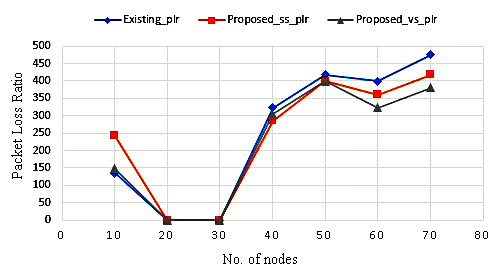 | Figure 8. Graph between Packet Loss Ratio Vs No. of nodes |
6.2.3. End to End Delay Measurement
End-to-end delay refers to the time that a packet takes for getting transmitted from source to destination across a network. Fig. 9 represents the end to end delay comparison in the existing system and our proposed model. By the present existing system of single cluster algorithm, the delay is shown to be higher significantly. It serves as the reference for the forthcoming proposed dynamic multi-clustering algorithm which is observed for two scenarios (i.e.) a VANET network with equal speed and a VANET network with varying speed.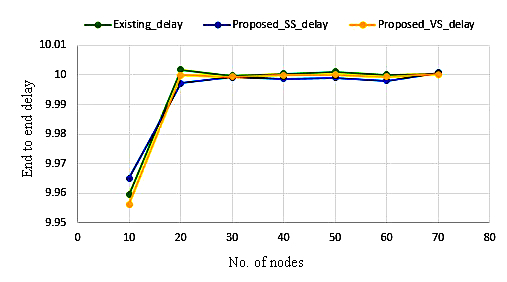 | Figure 9. Graph between End to end delay Vs No. of nodes |
The technical reasoning behind this graphical result is that the packet is subjected to more delay during the transfer, due to the presence of a single governing Master node in the platoon. Further, the existing system is subjected to broadcast storm, which may lead to high degree of packet loss and in return, increases the delay in the network. But in our proposed model, the delay has been reduced compared to the existing system. By the implementation of this dynamic algorithm, the interaction of outside vehicles can be controlled by the sub Master node formed, within the main cluster. This mechanism greatly reduces the tendency for the broadcast storm, thereby increasing the Packet Delivery Ratio of the network. As a result, the delay in the network is reduced significantly. By observation, both the cases in the proposed model are found to be similar. By the results in the graph, it is observed that the dynamic clustering algorithm is beneficial in terms of delay in the network, than the existing single cluster VANET system.
7. Conclusions
QoS is an important factor to be considered, while designing any Adhoc network. It is often considered to be very crucial for the implementation of an improved design in the existing system of wireless network. By our paper, we have proposed and described the implementation of dynamic clustering algorithm, over the existing VANET architecture. By the results produced with respect to the QoS parameters of Delay, Throughput and Packet Loss Ratio, the proposed algorithm is found to be meritorious in the aspect of outside intrusion and any other outside disturbances. With these results in hand, it could be creditable to say that this algorithm could be brought to good effects into the automobile industry and governmental bodies.
References
| [1] | Jia, D., Lu, K., and Wang, J., 2014, “A Disturbance-Adaptive Design for VANET-Enabled Vehicle Platoon”, IEEE Transactions On Vehicular Technology, 63(2), pp. 527-539. |
| [2] | Lo, S., Lin, Y., and Gao, J., 2013 “A Multi-Head Clustering Algorithm in Vehicular Ad Hoc Networks”, International Journal of Computer Theory and Engineering, Vol. 5(2), pp. 242-247. |
| [3] | Abboud, K., and Zhuang, W., “Stochastic Modeling of Single-Hop Cluster Stability in Vehicular Ad Hoc Networks”, IEEE Transactions on Vehicular Technology, DOI 10.1109/TVT.2015.2396298. |
| [4] | Gerla, M., Tsai, J.T., 1995 “Multiuser, mobile, multimedia radio network,” Wireless Networks, vol. 1, pp. 255-265. |
| [5] | Amis, A. D., Prakash, R., Vuong, T. H. P. and Huynh, D. T., 2000 “Max-min d-cluster formation in wireless ad hoc networks,” in Proc. IEEE Infocom Conf., pp. 32-41. |
| [6] | Xu, K., Gerla, M., 2002 “A heterogeneous routing protocol based on a new stable clustering scheme,” in Proc. Milcom Conf., vol. 2., pp. 838-843. |
| [7] | Chatterjee, M., Sas, S. K., Turgut, D., 2000 “An on-demand weighted clustering algorithm (WCA) for ad hoc networks,” in Proc. IEEE Globecom Conf., pp. 1697-1701. |
| [8] | Chiang, C. C., Wu, H. K., Liu, W., Gerla, M., 1997 “Routing in clustered multihop, mobile wireless networks with fading channel,” in Proc. IEEE Sicon Conf., pp. 197-211. |
| [9] | Basu, P., Khan, N., Little, T. D. C., 2001 “A mobility based metric for clustering in mobile ad hoc networks,” in Proc. Int. Conf. Distributed Computing Systems Workshop, pp. 413-418. |
| [10] | Tolba, F. D., Magoni, D., Lorenz, P., 2007 “Connectivity, energy and mobility driven clustering algorithm for mobile ad hoc networks,” in Proc. IEEE Global Telecommunications Conf., pp. 2786-2790. |
| [11] | Little, T. D. C., Agarwal, A., 2005 “An information propagation scheme for VANETs,” in Proc. IEEE Intelligent Transportation Systems Conf., pp. 155-160. |
| [12] | Ji, X., Zha, H., 2004 “Sensor positioning in wireless ad-hoc sensor networks using multidimensional scaling,” in Proc. IEEE Infocom Conf., pp. 2652-2661. |
| [13] | Krishna, P., Vaidya, N. H., Chatterjee, M., Pradhan, D. K., 1997 “A cluster-based approach for routing in dynamic networks,” ACM Sigcomm Computer Communication Review, vol. 27 (2), pp. 49-64. |
| [14] | Wu, T., Biswas, S., 2005 “A self-reorganizing slot allocation protocol for multi-cluster sensor networks,” in Proc. Int. Symp. Information Processing in Sensor Networks, pp. 309-316. |
| [15] | Yu, J. Y., Chong, P. H. J., 2003 “3hBAC (3-hop between adjacent cluster heads): a novel non-overlapping clustering algorithm for mobile ad hoc networks,” in Proc. IEEE PACRIM Conf., pp. 318-321. |
| [16] | Gunter, Y., Wiegel, B., Grossmann, H. P., 2007 “Cluster-based medium access scheme for VANETs,” in Proc. IEEE Intelligent Transportation, pp. 343-348. |
| [17] | Stefan Ruehrup, Paul Fuxjaeger, Dieter Smely, Nov 2014 “TCP-like congestion control for broadcast channel access in VANETs”, in International Conference on Connected Vehicles and Expo (ICCVE). |
| [18] | Jyotsna Rao Dawande, Sanjay Silakari and Anjana Jayant Deen, Dec 2015 “Enhanced Distributed Multi-Hop Clustering Algorithm for VANETs Based on Neighborhood Follow (EDMCNF) Collaborated with Road Side Units”, in International Conference on Computational Intelligence and Communication Networks (CICN). |

 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTML