-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
International Journal of Networks and Communications
p-ISSN: 2168-4936 e-ISSN: 2168-4944
2015; 5(4): 74-82
doi:10.5923/j.ijnc.20150504.02

Traffic Congestion Detection by Using VANET to Improve Intelligent Transportation System (ITS)
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLDongre Manoj M.1, Bawane Narendra G.2
1Ramrao Adik Institute of Technology, Nerul, Navi Mumbai, India
2S.B. Jain Institute of Management & Technology, Nagpur, India
Correspondence to: Dongre Manoj M., Ramrao Adik Institute of Technology, Nerul, Navi Mumbai, India.
| Email: |  |
Copyright © 2015 Scientific & Academic Publishing. All Rights Reserved.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

Congestion detection is major problem in urban roads. To make smart decisions to avoid congestion Vehicular Ad-Hoc network (VANET) is one of the solution. We present a strategy to detect the traffic congestion of both vehicle-to-vehicle (V2V) and vehicle to infrastructure (V2I) communication and this gives vehicle drivers several options about the location of congestion and its magnitude as well as options to avoid getting stuck in congestion. The messages transmitted guide the driver so as to take the decision needed. These can detect areas of high traffic density and low speeds. Multiple approaches have been proposed to detect the congestion. In this paper, we first analyze data obtained by vehicular communication to avoid the traffic and then include road side units i.e. towers. The system is capable of detecting traffic congestion areas in real-time with data collected and disseminated to vehicles using V2V communications. We visualize and simulate the result by using Decision Making Algorithm (DMA), Geobroadcast Communication pattern and Netbeans IDE7.0.1 Platform and shows that this is one effective way to control congestion.
Keywords: Congestion Detection, Geobroadcast Communication Pattern, DMA, Intelligent Transportation System (ITS), VANET, V2I, V2V
Cite this paper: Dongre Manoj M., Bawane Narendra G., Traffic Congestion Detection by Using VANET to Improve Intelligent Transportation System (ITS), International Journal of Networks and Communications, Vol. 5 No. 4, 2015, pp. 74-82. doi: 10.5923/j.ijnc.20150504.02.
Article Outline
1. Introduction
- Growing traffic on roads leads to unwarranted and unscheduled delays that have implications leading to loss of revenue and sometimes even loss of life. This consideration has led engineers putting in work in the recent past to detect traffic congestion and offer solutions that aim to reduce unwanted effects. Vehicular Ad-hoc network (VANET) has emerged as a possible solution to design networks that can solve traffic congestion detection problems [1, 2]. The first attempts aimed at vehicle to vehicle communication which essentially has a short range (1 km). Vehicle can be equipped with these V2V devices and that can serve the purpose of dedicated short range communication or DSRC [3, 4]. This mode is simpler and attractive in some ways but has limitations that warrant use of other schemes. For one, if density of vehicles is low or if the vehicle in question breaks down, V2V will cease to be effective. More importantly, it cannot solve the problems of early warning over a large range so as to allow vehicles to take alternate routes to destination [5-7]. The other possibility which offers larger range and other benefits that occur from longer range is vehicle to infrastructure or V2I network. This has long range and data processing and transmission of message to a full region covering all vehicles [8]. However, to implement this, large resource is needed as communication towers are expensive propositions [8]. The range of these V2I depends on its power and a suitable compromise or tradeoff between spacing of towers and transmission power can be arrived at depending upon the terrains and statistics of vehicle density and the topology of interconnection of roads. While observing the desirable features of both V2V and V2I [9-11].We control the good features of both and offer a better solution on traffic congestion detection and control. We present a typical model of a road with a bend and show using simulations that traffic congestion can be effectively done using V2V & V2I combined [12-15]. This combined use of V2V & V2I is robust and efficient as we show through our simulation results.A. Problem StatementTraffic congestion is a crucial problem of urban areas as well as on High way, traffic congestion, usually starts due to several reasons such as driver's misbehavior, accident on the road, obstacle on the road, weather conditions etc. mostly the congestion occurred due to accident. Result of this is, vehicles are either standstill or moving with very low speed resulting in time lapse and also wasting large amount of fuel. Traffic jam can get resolved within several hours or in critical condition it may take few days to get resolved. Thus congestion affects economy as well as it gives bad impact on the environment. Due to this many Automobile industries are taking initiative to find efficient solution for congestion control, unaware of congestion increase the severity of it. The more severe the congestion, the more time it will take to clear once the cause of it is eliminated. The ability for a driver to know the traffic conditions on the road ahead will enable him to seek alternate routes saving time and fuel. In order to provide drivers with useful information about traffic ahead a system must: a) Identify and detect the congestion, its location, severity and boundaries. b) Ones detect the congestion broadcast the information by affected vehicles to nearby vehicles which take decision These two requirements must be satisfied by any traffic congestion detection system.Congestion detection algorithms are designed to detect areas of high traffic density. Each vehicle captures and disseminates information such as location and speed and process the information received from other vehicles in the network. Multiple approaches have been proposed to implement congestion detection in VANETs. Congestion detection is one of many applications of VANETs.We propose Decision making Algorithm (DMA) to detect the congestion which helps to avoid heavy traffic. Our aim is to find a solution which enables the vehicles to take intelligent decisions based on the latest traffic status updates by broadcasting information among the vehicles. To create an application which gives prior information of the road condition and helps vehicles to take prior decision to prevent traffic congestion.This paper is organized as follows, an overview of related work is explained in section II, the methodology is explained in section III, and section IV covers algorithm and flowcharts. Section V and VI describes visualization, simulation and analysis, finally the conclusion is summed up in section VII.
2. Related Work
- Using many algorithms the research in VANET focuses on simulating vehicular traffic to detect congestion. Many researchers have addressed the issue of distributed detection and propagation of traffic congestion information also some researcher proposed a system that uses vehicle based GPS systems to discover and disseminate traffic congestion information. The cooperative approach to traffic congestion detection with complex event processing and VANET are explained in [1]. The work focuses on an event-driven architecture (EDA) as a novel mechanism to get insight into VANET messages to detect different levels of traffic jams; furthermore, it also takes into account environmental data that come from external data sources, such as weather conditions.In Ref [2] hybrid communication paradigm for vehicular networking is presented in which connectivity is provided by both existing network infrastructure. They depict a novel heterogeneous vehicular network scenario, in which overlapping wireless networks partially cover the vehicular grid. Vehicle-to-X (V2X) is based on a protocol switching decision. In [3] propose an Efficient Congestion Detection (ECODE) protocol that aims at evaluating the traffic characteristics of each road segment i.e., the road section connecting between any two successive intersections). Moreover, ECODE efficiently and reliably detects road segments with high traffic congestion in any urban grid-layout area.In ref [4] proposes a congestion detection and notification scheme using VANETs for urban expressways. The scheme adopts a simplified Doppler frequency shift method to estimate and differentiate traffic conditions for major and auxiliary roadways. Vehicular cooperation and human cognition are introduced to improve the estimation accuracy and to describe the overall traffic conditions. Additionally, the scheme develops a spatial–temporal effectiveness model based on the potential energy theory to control the dissemination area and survival time of the congestion information. However, the proposed scheme only focuses on real-time local traffic detection and rapid congestion relief. As an extension, this scheme can become a part of a city-wide live traffic information system similar to Google Maps. Because vehicles with this proposed scheme can work cooperatively to provide pure/noiseless and fused traffic data.Ref [5] presents a system to be used as road side unit developed for I2V communication here all vehicles will have to be equipped with compatible wireless module based on IEEE802.11P (WAVE) system operate in the 5GHz frequency band, the system consist of universal medium range radar (UMRR) and IEEE802.11P integrated together to detect vehicle but radar range is very small i.e.160m with 25cm of accuracy. Ref [6] proposes a new hybrid location-based routing protocol which combines features of reactive routing with location-based geographic routing in a manner that efficiently uses all the location information available. The protocol is designed to gracefully exit to reactive routing as the location information degrades. They show through analysis and simulation that HLAR protocol is scalable and has an optimal overhead.In ref [7] the problem of efficiently collecting and disseminating traffic information in an urban area is investigated. Here they have formulated the traffic data acquisition and explored the solution in mobile sensor network domain. Also the routing algorithm for vehicular network is introduced, to minimize the communication between the vehicles and evaluation of realistic application requirement on a real city map is discussed.The different communication patterns for VANET are studied in [8]. They introduced five distinct communication patterns for almost all the VANET applications to simplify the discussion of security and privacy in VANET and focus more on integrated system for communication pattern. Intersection collision warning system used for V2I communication to avoid accidents in urban area is explained in [9]. The system based on V2V communication is proposed. The relative angle and relative distance were computed using data from target and host vehicles received from V2V communication but they were unable to show real collision avoidance system. The low latency in delivering emergency warning in various load situations is described in ref [10]. The designed effective protocol comprises of congestion control policies for emergency warning dissemination. In [11] they analyzed, quantified and demonstrated, the strong impact of radio channel modeling on the performance and the operation of VANET networking and communication techniques. The multiple approaches have been proposed to implement congestion detection in [12].
3. Methodology
- In our work here, the traffic congestion detection is achieved by broadcasting the messages, with communications form vehicle to vehicle (V2V) as well as vehicle to infrastructure (V2I). The vehicle is assumed to be equipped with a communicating device. The communication is initialized by the affected vehicle. The vehicles which are involved in the communication are called as nodes. These nodes are mobile in nature hence while selecting the communication pattern this mobile nature is considered.A. Decision Making Algorithm (DMA)Possibility of an occurrence of an accident condition is considered in the preparation of algorithm. If one vehicle has met with an accident because of which a particular lane of the road is blocked, it can create congestion which we want broadcasting to reflect. In our method the affected vehicle generates the message of warning i.e. message for informing the accidental event. Here accident behaves as an external trigger for starting the broadcasting. After receiving this warning message the vehicle in short range takes decision and forwards it and thus onset the congestion is reported. According to decision the traffic flow is directed, which is achieved by V2V & V2I. As of our method are highlighted below.Information Gathering: The most basic information is the gathering of data from the environment. Each vehicle must be equipped with one or more devices that are capable of gathering data such as current location and speed. Information Sharing: The information must be shared between vehicles. Vehicles must be equipped with a device that allows them to transmit and receive information to and from other vehicles by creating a vehicular ad-hoc network (VANET).Knowledge Propagation: This Decision is propagated so that vehicles away from the event zone, unable to make this determination with the information received from vehicles around them, can benefit from it. Decision Making: As information from nearby vehicles as well as information relayed from far-away roadside unit is received, appropriate decision has to be taken so that the congestion can be detected. Information is transmitted by the affected vehicle and received by all the nearby vehicles. When information is received the receiving vehicle takes decision and updates the message.B. Communication PatternFor broadcasting the message Geobroadcast Pattern is used in which it has very low latency of messages to inform addressed vehicles as fast as possible. Geobroadcast messages are unidirectional Geobroadcast messages are typically sent upon a certain external event, Geobroadcast messages are not sent continuously, although messages with the same content may be repeated from time to time.
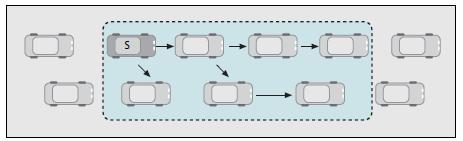 | Figure 1. Geobroadcast Communication Pattern [5] |
4. Traffic Congestion Detection Flowchart
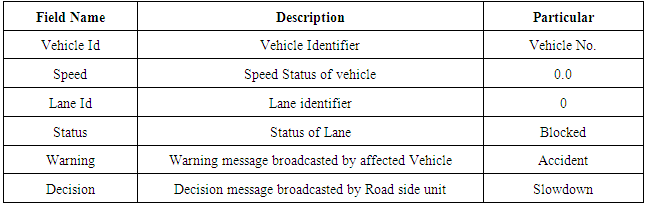
- The Congestion Detection achieved according to decision the traffic flow is directed, by using V2V & V2I communication are explained below.A. V2V CommunicationMessage Broadcast by Affected Vehicle: When accident happens the affected vehicle speed goes to zero. The device placed on the vehicle gathers this information such as current lane of the vehicle, current speed of the vehicle, lane identifier. The packet is send without any map knowledge to the one hop neighbor which is closest to destination. The affected vehicle is continuously broadcasting the message packets. Similarly we have road side units i.e. towers and this warning message is also received by the towers, based on which they take appropriate action. Affected vehicle generates the warning message and keeps on checking for vehicle in range. As soon as any object comes in its range, it transmits the message and it will keep on transmitting continuously. Field structure of the message broadcasted by affected vehicle is shown in table 1.
|
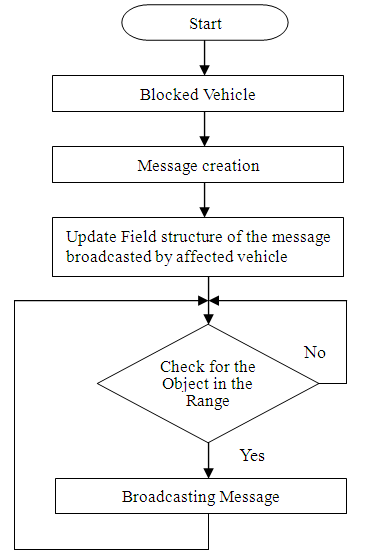 | Figure 2. Flowchart of Message broadcasting by affected vehicle |
|
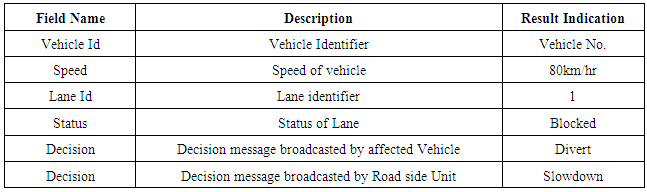
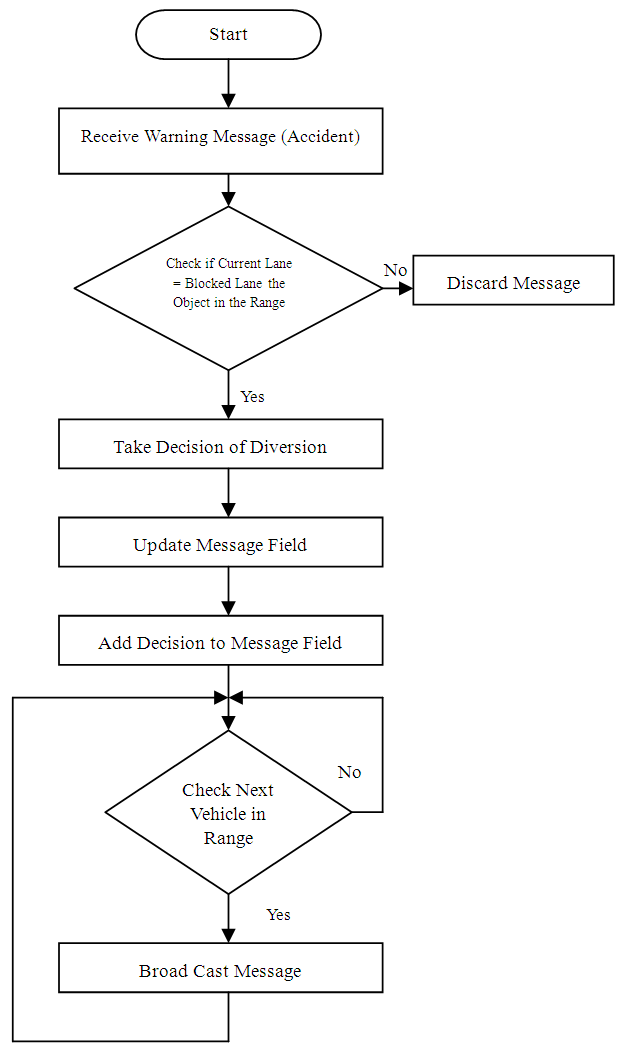 | Figure 3. Flowchart of Message broadcasting by vehicle in short range |
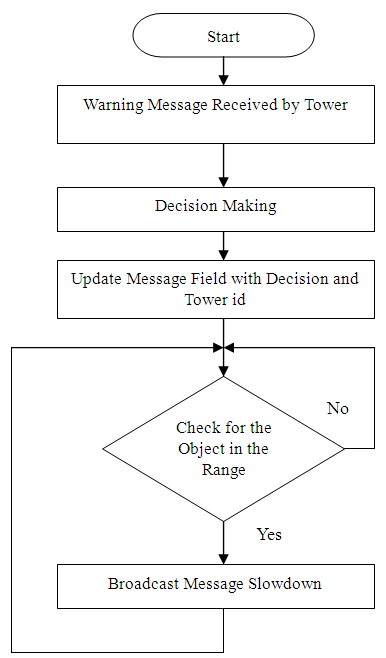 | Figure 4. Flowchart of Message Broadcasting by Tower |
5. Visualization and Simulation
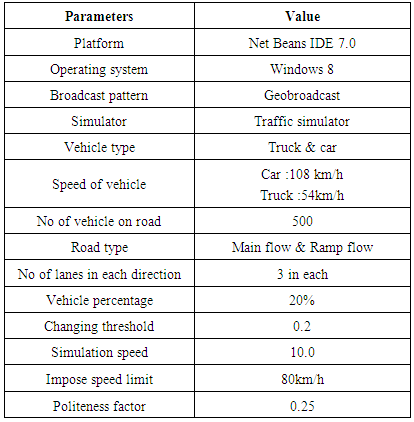
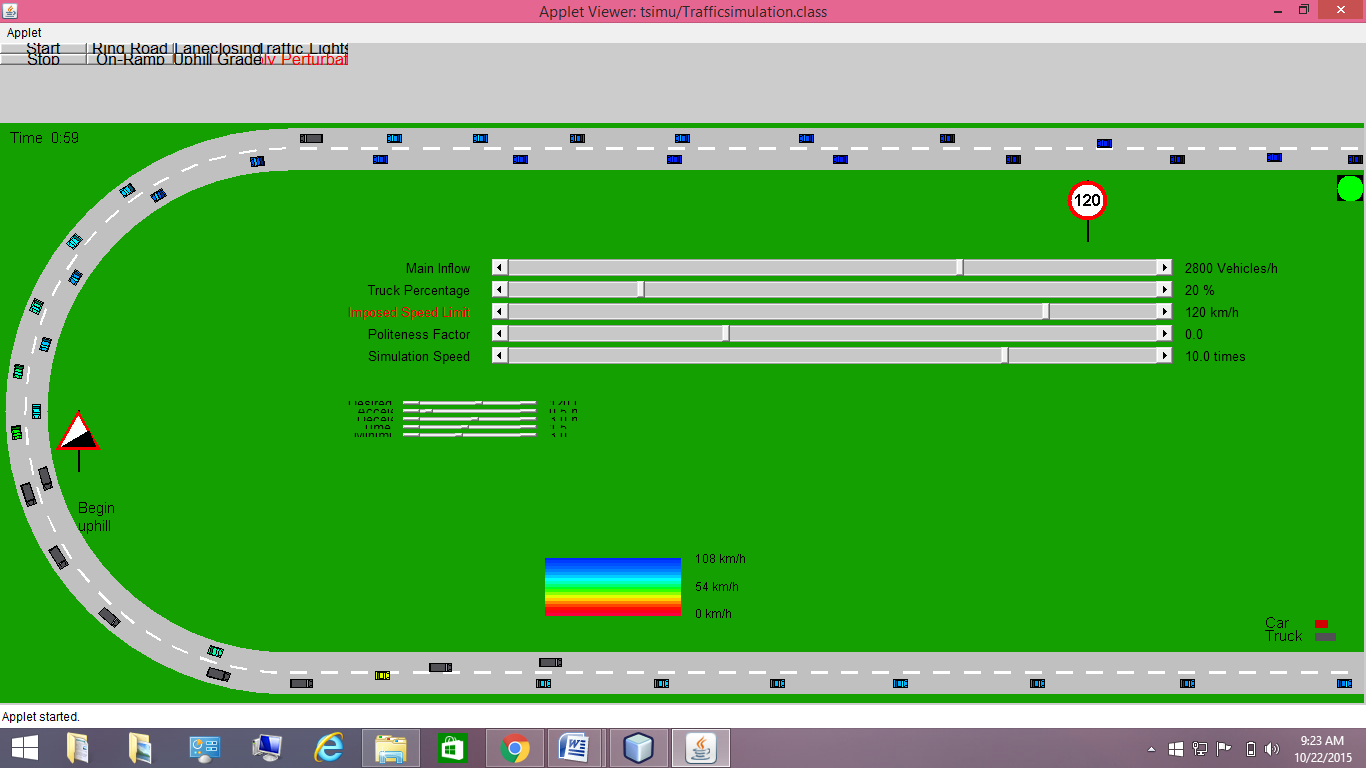
- We simulate result by using Net Beans IDE 7.0 platform. The NetBeans IDE bundle for Java SE contains what is needed to start developing NetBeans plugins and NetBeans Platform based applications; no additional SDK is required. Applications can install modules dynamically. NetBeans IDE is an open-source integrated development environment. NetBeans IDE supports development of all Java application types. The system parameters are listed in table III for visualization and simulation.
|
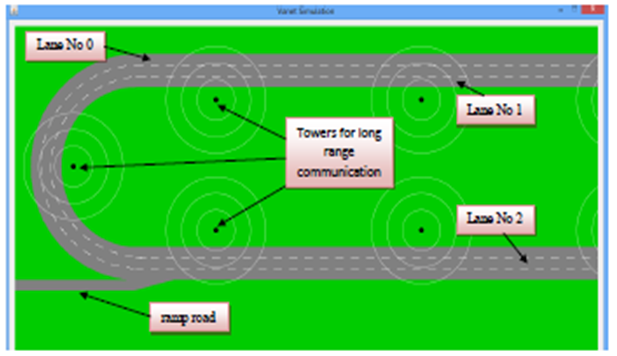 | Figure 5. Road View |
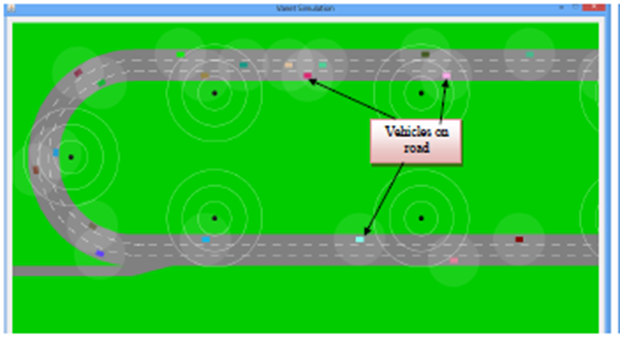 | Figure 6. Vehicles on road |
 | Figure 7. Congestion Scene |
6. Analysis
- Congestion DetectionBy plotting the number of vehicles v/s speed we can find out how many vehicles are there in congestion at particular time. For this we have to consider different time series. The graph of traffic congestion detection for different three series is shown in fig. 8. From the graph we observe that for series one (blue) and series two (red) vehicle are in congestion as their speed reducing to zero, and for third series(green) no vehicle in congestion. Thus we have detected the congestion on road.
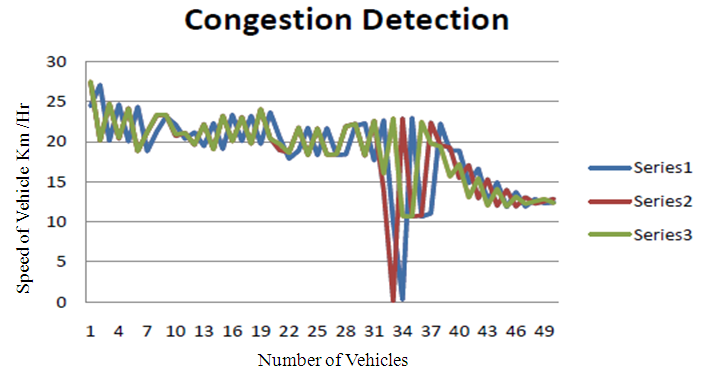 | Figure 8. Congestion Detection shown for three different series (Series 1 & 2 shows vehicles on congestion as speed reducing to zero) |
 | Figure 9. Speed of vehicles reduces to zero which shows congestion detection |
7. Conclusions
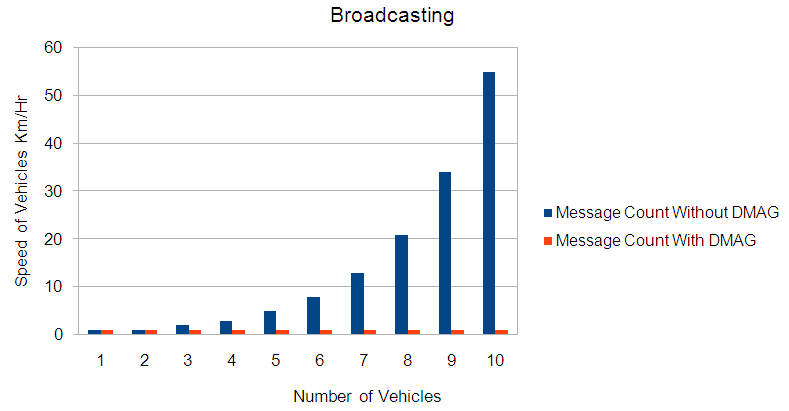
- In this paper we address the problem of heavy traffic congestion especially in urban areas. By using congestion detection algorithm we detected congestion on road. Geobroadcsat pattern are used for communication purpose. We propose an effective solution based on VANET. In proposed method the main focus is on traffic congestion detection which can be achieved by broadcasting the prior information about the status of road. With updated knowledge traffic is moving according to the decision of the broadcasted message, We applied the Decision Making Algorithm (DMA) the speed of vehicle reduces to zero hence we detect the congestion. Vehicle broadcasting is limited only one message thus highly reducing the message overhead which improves bandwidth utilization also. Hence we call it as intelligent communication system to detect congestion thus resulting in congestion detection In future work will cover control after congestion detection which will improve the intelligent transportation system (ITS) which is today’s need, and expand this research for control Inner-city traffic where more complex topologies exist.
ACKNOWLEDGMENTS
- I would like to express my very great appreciation to Dr. M.S. Bhatia Professor with Electronics and Telecommunication Engg, Department in Ramrao Adik Institute of Technology, Navimumbai (India) for his valuable and constructive suggestions. His willingness to give his time so generously has been very much appreciated.