Tarik Hrima, Kliment Hadjov, Dimitar Dontchev
Dep. Applied Mechanics, University of Chemical Technologies and Metallurgy, Sofia, Bulgaria
Correspondence to: Kliment Hadjov, Dep. Applied Mechanics, University of Chemical Technologies and Metallurgy, Sofia, Bulgaria.
| Email: |  |
Copyright © 2016 Scientific & Academic Publishing. All Rights Reserved.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

Abstract
In this paper, the authors obtained the hysteresis loop curves in the case of imposed strains and stresses respectively introducing a nonlinear constitutive integral equation with singular kernels. The Mullins effect was taken into account using a damping function related with the initial damage by large strains. The nonlinearity due to these strains was taken into account using the Ogden equation. Comparisons between theory and experiments were made.
Keywords:
Hysteresis, Rubbers, Mullins effect, Large strains, Strain & stress controlled laws
Cite this paper: Tarik Hrima, Kliment Hadjov, Dimitar Dontchev, Stress and Strain Controlled Hysteresis of Rubbers, International Journal of Materials Engineering , Vol. 6 No. 2, 2016, pp. 47-50. doi: 10.5923/j.ijme.20160602.04.
1. Introduction
Rubbers are increasingly used in modern industry [1-3]. Resinous materials and rubbers are elastoviscous solids. They are very deformable and possess non-linear viscous behavior. Their creep and stress relaxation is non-linear according to the applied stresses (strains) [2-4]. The last non-linearity can be observed excluding the time factor from the creep curves (the so-called isochrones). Thus, rubbers by large strains require identification and description of nonlinear elastoviscosity. One of the most important results to describe the vibration attenuation capability of rubbers is the hysteresis loop. In the general nonlinear viscoelastic case, this loop can be obtained from the solution of the constitutive mechanical stress-strain equation. It is well-known that the Boltzmann hereditary theory using integral equations of Volterra [3-6] can well describe the creep and stress relaxation of different viscoelastic solids. In the case of large strains one needs to take into account both the physical and geometrical nonlinearities. In this study, we propose an analytical approach to obtain the hysteresis loop of rubbers as a function of the imposed strain or stress amplitude and frequency. Here we examine a Polyisoprene rubber with included fillers (cinders) as an example described in [7].
2. General Framework
Assuming similarity to the isochrones of the stress relaxation curves let’s introduce the following integral equation in the case of nonlinear elastoviscous behavior to describe the mechanical behavior of such a rubbers [4-6]  | (1) |
Here  is the stress as a function of the time t,
is the stress as a function of the time t,  is the imposed strain and
is the imposed strain and  is the relaxation kernel which can be found from stress relaxation tests and
is the relaxation kernel which can be found from stress relaxation tests and  is the instantaneous stress-strain curve. To well describe this curve one can apply the Ogden relation [3], which in the uniaxial (traction) test can be expressed as
is the instantaneous stress-strain curve. To well describe this curve one can apply the Ogden relation [3], which in the uniaxial (traction) test can be expressed as  | (2) |
Here  are parameters obtained from instantaneous stress-strain test and the stretch
are parameters obtained from instantaneous stress-strain test and the stretch  is related with the engineering strain as follows
is related with the engineering strain as follows  . Equation (1) with (2) represent the stress response in the case of imposed strain law.The solution of equation (1) can be represented as follows [4-6]
. Equation (1) with (2) represent the stress response in the case of imposed strain law.The solution of equation (1) can be represented as follows [4-6] | (3) |
Here  represents the resolving creep kernel. To obtain the strain curve (nonlinear creep) one should use the inverse function [4, 6]
represents the resolving creep kernel. To obtain the strain curve (nonlinear creep) one should use the inverse function [4, 6] | (4) |
Equation (4) with (3) represents the strain response in the case of imposed stress law.In this paper, we will employ the following stress relaxation kernel  | (5) |
In this case the solution has the form (3) with the following creep (resolving) kernel [6]  | (6) |
Here  is the gamma function. In equations (2, 3) the kernel
is the gamma function. In equations (2, 3) the kernel  can be identified from stress relaxation tests.To take into account the Mullins effect (stress softening after the first cycle) we will introduce the so-called normalized damping function in the nonlinear integral equation related as mentioned in [8] with the initial damage by large strains
can be identified from stress relaxation tests.To take into account the Mullins effect (stress softening after the first cycle) we will introduce the so-called normalized damping function in the nonlinear integral equation related as mentioned in [8] with the initial damage by large strains | (7) |
Here C is a damping parameter which should take into account the damage at the end of the first cycle which is related with some physical parameters. As mentioned in [8] this damping function should remain constant when unloading. Thus, our nonlinear constitutive integral equation (the stress response by imposed strains) becomes | (8) |
where  and
and  | (9) |
In this equation H(t) is the Heaviside function, which help us to retain the damping function constant after the first loading from 0 to the half period T/2 (the loading time at the end of the first cycle). In the case of sinusoidal impulse loading, the imposed period T is related with the imposed angular frequency  as
as  - see equation (16)). In the case of stress controlled test we need the solution of the nonlinear equation (8). Thus, using the resolving kernel (6) to the strain response we can write (see equations (3,4)
- see equation (16)). In the case of stress controlled test we need the solution of the nonlinear equation (8). Thus, using the resolving kernel (6) to the strain response we can write (see equations (3,4) | (10) |
with  Here
Here  is the inverse function of
is the inverse function of  and
and is the creep kernel which has the form (6). The inverse function can be approximated introducing a parabolic function of arbitrary degree. To obtain the damping parameter C we need to calculate the damage
is the creep kernel which has the form (6). The inverse function can be approximated introducing a parabolic function of arbitrary degree. To obtain the damping parameter C we need to calculate the damage  after the first and the second cycle. This damage can be defined as [9]
after the first and the second cycle. This damage can be defined as [9] | (11) |
where  and
and  are the stored energies after the first and the second cycle respectively. In the case of strain controlled test these energies can be expressed as the energy stored upon loading from zero to maximum strain [10]
are the stored energies after the first and the second cycle respectively. In the case of strain controlled test these energies can be expressed as the energy stored upon loading from zero to maximum strain [10] | (12) |
In the case of sinusoidal pulsations for the n-th cycle we can write | (13) |
In the case of imposed stresses (stress controlled test) we should use another definition concerning the stored energy [10], namely the energy stored upon loading from zero to maximum stress | (14) |
Note that in the case of small strains (linear stress-strain relation) these energies coincide [10]. From equations (8, 9, 10, 13 and 14) one can see that these energies depend on the damping parameter C. In order to identify this parameter we need an independent test to obtain the damage mentioned in equation (11). In [11, 12] the authors propose a method to obtain such a damage as a function of the strain rate. In the case of imposed stresses, one need to proceed in the same manner but introducing the stress rate. These experimental damages at the end of the loading process (the end of the half period in the case of sinusoidal pulsations) should correspond to the damage from equation (11) in the case of imposed strains (stresses) respectively. Thus, the damping parameter C should be obtained from the following equation | (15) |
In the strain (stress) controlled case we should use equation (13) or (14) respectively. Thus, for n = 1,2 to the stored energies after the first and the second cycle in the case of imposed strains we have | (16) |
Identifying C we obtain  and its inverse function and from equations (8,10) we arrive to the stress and strain responses respectively.
and its inverse function and from equations (8,10) we arrive to the stress and strain responses respectively.
3. Experimental Comparisons
In this work, we used a polyisoprene rubber [7] produced at UCTM-Sofia. The kernel parameters were respectively The Ogden parameters were as follows:
The Ogden parameters were as follows: and the imposed strain and stress laws were:
and the imposed strain and stress laws were: | (16) |
Here  ,
, [MPa],
[MPa],  [Hz]. The damping parameter was obtained as
[Hz]. The damping parameter was obtained as  . Note that in the first equation (16) we added a small constant initial strain in order to avoid buckling phenomenon (negative contraction stresses)-see figure 1a.In the first figure we illustrated the stress (strain) responses in the case of imposed strains (stresses) according to equations (8) and (10) respectively.
. Note that in the first equation (16) we added a small constant initial strain in order to avoid buckling phenomenon (negative contraction stresses)-see figure 1a.In the first figure we illustrated the stress (strain) responses in the case of imposed strains (stresses) according to equations (8) and (10) respectively.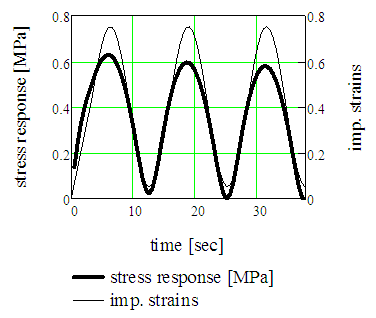 | Figure 1a. Imposed strain and stress response |
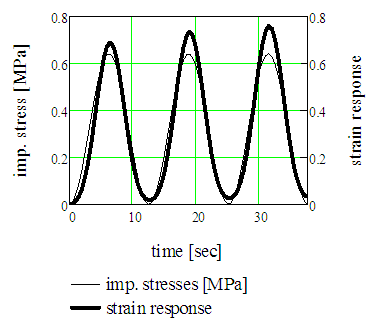 | Figure 1b. Imposed stress and strain response |
In the second figure 2 one can see the averaged curve of the damage evolution using the method proposed in [10, 11]. The end of the half period (the end of the first cycle loading) was marked with vertical dotted line. The cross point between this line and the averaged damage curve (with thick line) gives us the experimental damage at the end of the first cycle (the horizontal line). This damage  should be introduced in equations (15, 16) in order to obtain the damping parameter C.
should be introduced in equations (15, 16) in order to obtain the damping parameter C. 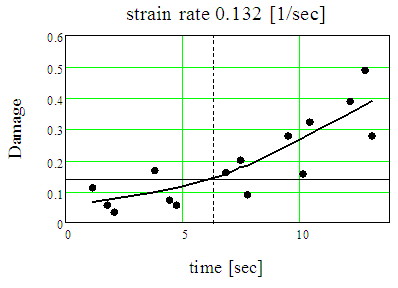 | Figure 2. Damage evolution and experimental damage  |
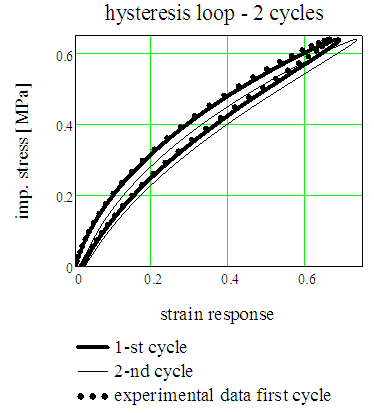
Note that the averaged damage evolution curve was obtained by smoothing the experimental data using the MathCad averaging software procedure in the case of data scattered along a band whose width fluctuates considerably.Finally, in figure 3, we illustrated the hysteresis loops for our polyisoprene rubber according to equations (8, 10).The respective experimental curves were obtained using the device discussed in [13, 14].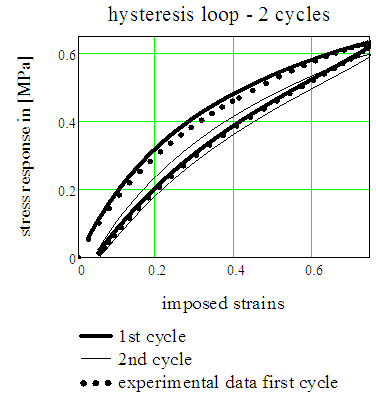 | Figure 3a. Hysteresis loop for polyisoprene rubber: imposed strains |
 | Figure 3b. Hysteresis loop for polyisoprene rubber: imposed stresses |
4. Conclusions
Using nonlinear integral equations with three singular kernels and a damping function whose parameter can be obtained from independent experimentation, we have obtained the stress (strain) responses in the case of imposed strains (stresses) taking into account the Mullins softening effect. The experimental hysteresis curves agree with the theoretical ones obtained from the stress (strain) responses by imposing large sinusoidal pulsations for the strain (stress) law. Comparing the two figures 3a and 3b, one can conclude that the Mullins effect (the first cycle hysteresis area greater than the second one) is more pronounced in the case of imposed strains.
ACKNOWLEDGMENTS
The work is funded by The European Commission under the Erasmus Mundus Green IT project number 2012-2625/001-001-EMA2.
References
| [1] | Banks H.T. et all, A Brief Review of Elasticity and Viscoelasticity for Solids, Advances in Applied Mathematics and Mechanics, 3, No.1,pp. 1-51, 2011. |
| [2] | Luo W., Hu X., Wang C., Li Q. frequency and strain amplitude dependent dynamical mechanical properties and hysteresis loss of CB-filled vulcanized natural rubber, Int. Journ. of Mech. Sciences, 52, 168-174, 2010. |
| [3] | Dorfmann A., Ogden R.W. A pseudo-elastic model for loading, partial unloading and reloading of particle-reinforced rubber, International Journal of Solids and Structures, 40, pp. 2699–2714, 2003. |
| [4] | Yu V. Suvorova, Yu N. Rabotnov’s nonlinear hereditary-type equation and its applications, Mechanics of Solids, 39(1): 132-138, 2004. |
| [5] | Shestopalov Y., Smirnov Y., Integral equations, Karlstad University-Division for engineer sciences, physics and mathematics, Karlstad, 295 p., 2002. |
| [6] | Hadjov Kl., Dontchev D., Hrima T., Aleksandrova V. On the Integral Equations of Volterra Concerning the Large Time Scale, Annals of Faculty Engineering Hunedoara - International Journal of Engineering, t.12, 2, 2014. |
| [7] | A. Alexandrov, Z. Tzolov, International Journal of Differential Equations and Applications, 3 (4), 2001, 359-363. |
| [8] | Roland C.M. The Mullins Effect in Crosslinked Rubber, Journal of Rheology, 33,4 659-670, 1989. |
| [9] | Souza J.C.S. de et all. Use of Technique of Accoustic Loading Random to Simulate Failure/Damage in Structures beam Type, 11-th International Conference on Vibration Problems, Lisbon, Portugal, 9-12 September, 2013. |
| [10] | Graesser E.J, Wong C.R. The Relationship of Traditional Damping Measures for Materials with High Damping Capacity: A Review, Mechanics and Mechanisms of Material damping, ASTM STR 1169, V.K. Kinra and A. Wolfenden, Eds, American Society for Testing and Materials, Philadelphia, 1992, pp. 316-343. |
| [11] | Goldman A.Y, Haykin S.Y. On Damage Accumulation in Polymers at Micro and Macro Levels Mechanics of Composite Materials, 2, 263-268, 1976. |
| [12] | Hadjov K., Popov K., Mandichev G. One Modification of the Damage Theory, Mechanics of Composite Materials, 6, 1115-1117, 1981. |
| [13] | Pavlitov C., and all. An Approach to Identification of a Class of Switched Reluctance Motors, SPEEDAM 2008-19th International Symposium on Power Electronics Electrical Drives and Motion, Ischia-Italy, ISBN: 978-1–4244-1664–6, IEEE Catalog Number:CFP0848A-CDR, Library of Congress:2007936381,11-13 June 2008. |
| [14] | Pavlitov C. and all. Generalized Model for a Class of Switched Reluctance Motors, 13th International Power Electronics and Motion Control Conference EPE-PEMC, Poznan-Poland, 1-3 September 2008. |

 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTML