-
Paper Information
- Next Paper
- Previous Paper
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
International Journal of Internet of Things
2017; 6(2): 56-61
doi:10.5923/j.ijit.20170602.10

Farmer Friendly Drone
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLPriyesh Sujay Miranda, Nithin Monteiro, Pradeep V., Royston Dsouza, Gerald H. Fernandes
Department of Computer Science & Engineering, St Joseph Engineering College, Mangaluru, India
Correspondence to: Priyesh Sujay Miranda, Department of Computer Science & Engineering, St Joseph Engineering College, Mangaluru, India.
| Email: |  |
Copyright © 2017 Scientific & Academic Publishing. All Rights Reserved.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

Drone technology has skyrocketed over the past decade driving costs down and the number of potential applications up, one being agricultural field. This project on Drone is specifically used for agricultural work. It is used for spraying medicinal liquid on agricultural plants and crops. It reduces the work-force required to do the work. As a result, a single user will be able to do a work, standing from particular place and eases the work of the farmer to irrigate his crops with medicinal liquid preventing them from being infected by crop diseases.
Keywords: Quadcopter, Propellers, Motors, Electronic Speed Controller, Arduino, Pump, Transmitter & Receiver
Cite this paper: Priyesh Sujay Miranda, Nithin Monteiro, Pradeep V., Royston Dsouza, Gerald H. Fernandes, Farmer Friendly Drone, International Journal of Internet of Things, Vol. 6 No. 2, 2017, pp. 56-61. doi: 10.5923/j.ijit.20170602.10.
Article Outline
1. Introduction
- An Unmanned Aerial Vehicle (UAV), commonly known as a drone, is an aircraft without a human pilot aboard. Essentially, a drone is a flying robot. UAVs are a component of an unmanned aircraft system (UAS); which include a UAV, a ground-based controller, and a system of communications between the two [8]. The flight of UAVs may operate with various degrees of autonomy: either under remote control by a human operator or autonomously by onboard computers. The drone that is being implemented here is of quad copter type. Quad copters generally use two pairs of identical fixed pitched propellers; two clockwise and two counter clockwise (CCW). These use independent variation of the speed of each rotor to achieve control. By changing the speed of each rotor it is possible to specifically generate a desired total thrust; to locate for the centre of thrust both laterally and longitudinally; and to create a desired total torque, or turning force [1].Crop Spraying with the unmanned aerial vehicle (UAV) sprayer does not need a runway; they can take off and land vertically [8]. Flying at low altitude of several meters, the crop-spraying can be controlled in any the sight of distance range. They are suitable for all kinds of complex terrain, crops and plantations of varying heights. Precise and accurate crop spraying ensures the best coverage and application of fertilizers or pesticides on lands. Aerial application, or what was formerly referred to as crop dusting, involves spraying crops with crop protection products from an agricultural aircraft. Until recently user needed a specialized agricultural aircraft to perform these operation. But now, user can cut rates, costs and with the own UAV Sprayer. The Aerial Application Agricultural Spray combines new pumps and spray heads designed to be more reliable. The technology and the results obtained by it leave no question that low and ultra-low volume spraying is a viable alternative in today’s environmentally aware world. Better results are achieved with fewer chemicals. Some of the benefits of crop spraying with a UAV Sprayers include a significant reduction in application cost by utilizing an UAV aircraft and a notable improvement in coverage and control through consistent application of the best suited droplet size for better penetration of crop canopy, decreased drift potential and evaporation, and greater adherence of chemical to the leaves. The spray system was designed to promote economically and ecologically sound spray methods that are the future of agricultural aviation.Agricultural unmanned helicopters and multi-rotors can take off vertically which effectively lowers the operation difficulty and the risks. Flying at low altitude of several meters, the spraying effect can be controlled in the active area. It is suitable for all kinds of complex terrain farmlands and the crops and woods of different heights. The spraying operation skills of agriculture UAV Sprayer can be mastered via simple training. Environment-Friendly - The dosage of pesticide is reduced, so it can minimize the pollution of pesticide to the environment and crops. It is not harmful to the operator in the distances when dusting, and the labor intensity is reduced dramatically [2].This paper provides details through the design chapter which includes architectural design, functional design of the quadcopter being built and also through the implementation chapter with necessary algorithms that are being used.
2. Related Work
- This project is influenced by the work carried out by B. Tech student A. Gopi Raja of KL University Vijayawada. The drone is designed to spray pesticide for crops planted on the ground and spreading seeds across the field [3]. High-tech drones were developed and used by United Nation for security purpose. The Japanese used drone to survey agricultural fields which was not possible by walk. The Indian government uses drone for traffic management. It is used in various countries for providing medical aide through air during road accidents.
3. Design
- Design is the first step in the development phase for any engineering product or system. It may be defined as the process of applying various techniques and principles for the purpose of defining the process or a system in sufficient detail to permit its physical relation.Abstract design is a concept or idea that indicates the creation of something in the mind using a visual language of form, color and line to create a composition which may exist with a degree of independence from visual reference in the world.The design activity begins when the requirement document for the software to the developed is available. While the requirement specification activity is entirely in the problem domain, design is the first step in moving from the problem of domain to solution domain. The goal of design process is to produce a model or representation of a system, which can be used later to build that system.
3.1. Architectural Design
- Design phase starts with the requirement document delivered by the requirement phase and maps the requirements into architecture. Architecture defines the components, their interface and behavior.Architectural Design is a creative process where user tries to establish a system organization that will satisfy the functional and non-functional system requirements. It contains components that are the building blocks of the system. The interface is the architectural surface where independent components meet and communicate with each other. Interface defines the behavior where one component responds to the stimuli of another component’s action.The product of architectural design process is an architectural design document. This may include a number of graphical representations of the system along with associated descriptive text [4].
3.2. Functional Design
- Functional design is a level of the design process in which subtasks are specified and the relationship among them is defined, so that the total collection of subsystem performs the entire task of the system. It is the aspect of the system design concerned with system’s objective and functions, rather than its specific components.
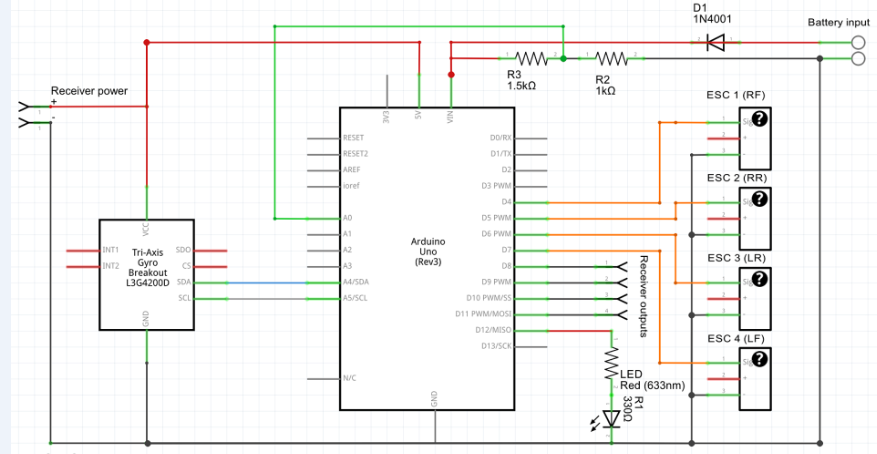 | Figure 1. Architectural Diagram of Drone |
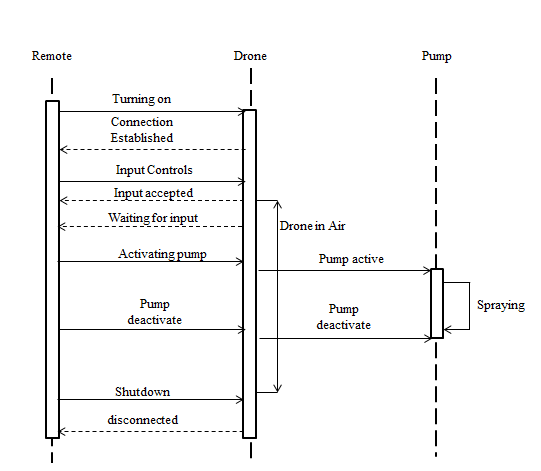 | Figure 2. Sequence diagram |

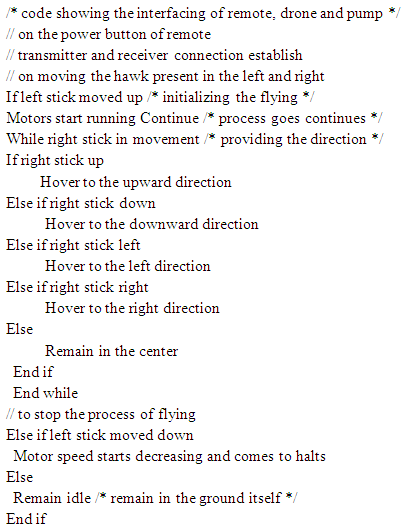
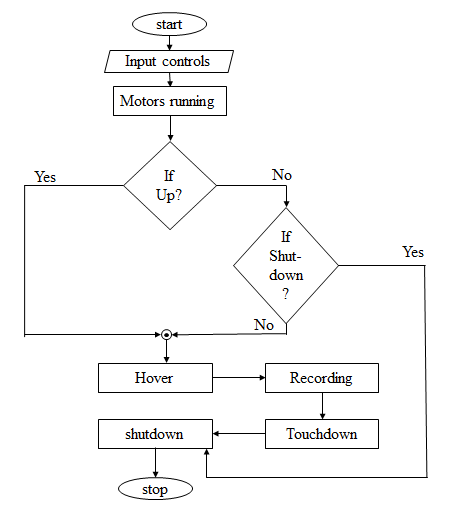 | Figure 3. Drone Controlling |
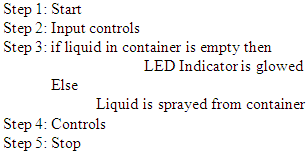
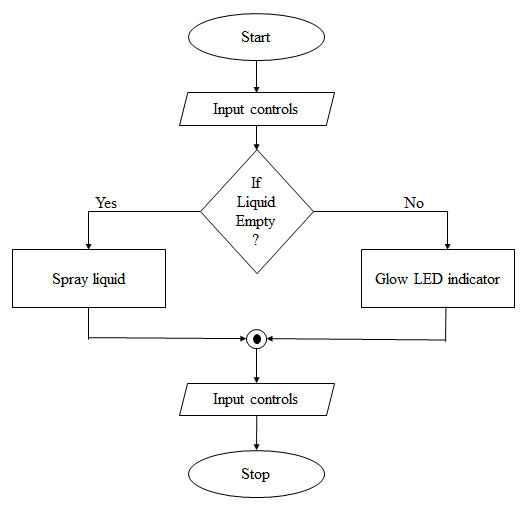 | Figure 4. Working of Spray |
4. Implementation
- Implementation is the carrying out of execution, a method, applying a plan in a practical manner. The implementation plan describes how the information system will be deployed, installed and transitioned into an operational system. The plan contains an overview of the system, a brief description of the major tasks involved in the implementation, the overall resources needed to support the implementation effort (such as hardware, software, facilities, material and personnel) and any specific implementation requirement.The plan is developed during the Design Phase and is updated during the Development Phase; the final version is provided in the integration and Test Phase and is used for guidance during the Implementation Phase. To implement a system successfully, a large number of inter-related tasks need to be carried out in an appropriate sequence. Utilizing a well- proven implementation methodology and enlisting professional advice can help but often it’s the number of tasks, poor planning and inadequate resourcing that cause problems with an implementation project, rather than any of the tasks being particularly difficult. Similarly with the cultural issues it is often the lack of adequate consultation and two-way communication that inhibits achievement of the desired results.In computer science, an implementation is a realization of a technical specification or algorithm as a program, software component, or other computer system through computer programming and deployment. Many implementations may exist for a given specifications World Wide Web Consortium-recommended specifications, and software development tools contain implementations of programming language.System implementation generally benefits from high levels of user involvement and management support. User participation in the design and operation of information system has several positive results. First, if users are heavily involved in systems design, they move opportunities to mold the system according to their priorities and business requirements, and more opportunities to control the outcome. Second they are more likely to react positively to the change process. Incorporating user knowledge and expertise leads to better solutions.
4.1. Hardware and Software Requirements
- Hardware requirements:Quad-copter 4 axis Frame-1Propeller (8 inch)-4Drone motor-4ESC-4Arduino UNO Gyroscope 3 axis-1Battery-11.1V USB cable Pump motor-1Wires and connectors Radio Frequency 4-Channel Board and RemoteSoftware requirements:Arduino Ide 1.8.2 The Arduino project provides the Arduino integrated development environment (IDE), which is a cross-platform application written in the programming language Java. It originated from the IDE for the languages Processing and Wiring. It is designed to introduce programming to artists and other newcomers unfamiliar with software development. It includes a code editor with features such as syntax highlighting, brace matching, and automatic indentation, and provides simple one-click mechanism to compile and load programs to an Arduino board. A program written with the IDE for Arduino is called a "sketch" [5].The Arduino IDE supports the languages C and C++ using special rules to organize code. The Arduino IDE supplies a software library called Wiring from the Wiring project, which provides many common input and output procedures. A typical Arduino C/C++ sketch consists of two functions that are compiled and linked with a program stub main () into an executable cyclic executive program:• setup (): a function that runs once at the start of a program and that can initialize settings. • loop (): a function called repeatedly until the board powers off. After compiling and linking with the GNU tool chain, also included with the IDE distribution, the Arduino IDE employs the program to convert the executable code into a text file in hexadecimal coding that is loaded into the Arduino board by a loader program in the board's firmware [6].IP WebcamIP Webcam is an application which involves a client and a server device. The server device starts the recording; the client device enters the IP address provided by server. IP Webcam turns the phone into a network camera with multiple viewing options. View the camera on any platform with VLC player or web browser. Without internet access streaming of video can dine by using Wi-Fi network. Two-way audio supported in tiny Cam Monitor on another android device.Use IP Webcam with third-party MJPG software, including video surveillance software, security monitors and most audio players.Features include: • Video recording in WebM, MOV, MKV or MPEG4 (on Android 4.1+) • Audio streaming in wav, opus and AAC (AAC requires Android 4.1+) • Motion detection with sound trigger, Tasker integration.• Date, time and battery level video overlay.• Extensive baby and pet monitor features: night vision, motion detection, sound detection [7].Gyroscope (MPU-6050 Three-Axis)The MPU-6050 parts are the world’s first Motion Tracking devices designed for the low power, low cost, and high-performance requirements of smartphones, tablets and wearable sensors. The MPU-6050 incorporates InvenSense’s Motion Fusion and run-time calibration firmware that enables manufacturers to eliminate the costly and complex selection, qualification, and system level integration of discrete devices in motion-enabled products, guaranteeing that sensor fusion algorithms and calibration procedures deliver optimal performance for consumers.The MPU-6050 devices combine a 3-axis gyroscope and a 3-axis accelerometer on the same silicon die, together with an onboard Digital Motion Processor (DMP), which processes complex 6-axis Motion Fusion algorithms. The device can access external magnetometers or other sensors through an auxiliary master I²C bus, allowing the devices to gather a full set of sensor data without intervention from the system processor.
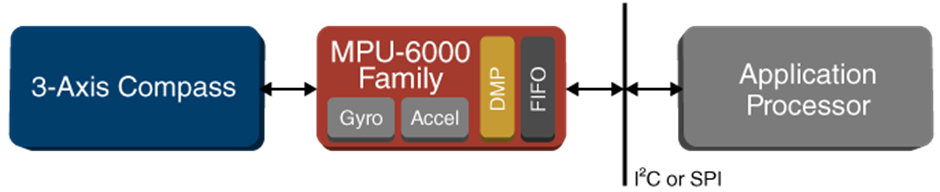 | Figure 5. MPU-6000 Family Block Diagram |
4.2. Pseudocode/Algorithm
- Pseudo code is a kind of structured English for describing algorithms. It allows the designer to focus on the logic of the algorithm without being distracted by the details of language without being distracted by the details of entire logic of the algorithms that implantation becomes a mechanical task for translating line into source code.The purpose of using the Pseudocode is that it is easier for a human to understand than conventional programming language and is a compact and environment dependent description of key principle of an algorithm.Algorithm/Pseudocode used in the implementationPseudocode of Interfacing
5. Conclusions
- Drones will soon take on to be an imperative existence in the coming future. They will be seen taking up larger roles for a variety of jobs including business in the immediate future. They could become a part of daily lives, from smallest details like delivering groceries to changing the way farmers manage their crops, to revolutionizing private security, or maybe even aerial advertising. Today, quadcopters are capturing news video, recording vacation travel logs, filming movies, providing disaster relief, surveying real estate and delivering packages.This project aims at providing ease of work in agricultural field by reducing time and work force. The model is built in a way that it can be modified to stand up to changes in the technology world. Hence quadcopters have an exemplarily bright future. The success lies upon the users whether they productively use it or destructively use it.