-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
International Journal of Information Science
p-ISSN: 2163-1921 e-ISSN: 2163-193X
2016; 6(1): 20-27
doi:10.5923/j.ijis.20160601.02

Text Encryption Based on Glider in the Game of Life
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLMajid Vafaei Jahan, Faezeh Khosrojerdi
Mashhad Branch, Islamic Azad University, Iran
Correspondence to: Majid Vafaei Jahan, Mashhad Branch, Islamic Azad University, Iran.
| Email: |  |
Copyright © 2016 Scientific & Academic Publishing. All Rights Reserved.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

The Game of Life cellular automaton is a classic example of a massively parallel collision-based computing device. The automaton exhibits mobile patterns, gliders, and generators of the mobile patterns, glider guns, in its evolution. We show how to construct basic logical operations, AND, OR, NOT in space-time configurations of the cellular automaton. Also, decomposition of complicated Boolean functions is discussed. Also in this paper advantages of our technique are demonstrated on an example of a method for text encryption by mapping text to binary space. This method is based on glider and rules of Game of Life.
Keywords: Cellular Automata, Text encryption, Glider, Game of Life
Cite this paper: Majid Vafaei Jahan, Faezeh Khosrojerdi, Text Encryption Based on Glider in the Game of Life, International Journal of Information Science, Vol. 6 No. 1, 2016, pp. 20-27. doi: 10.5923/j.ijis.20160601.02.
Article Outline
1. Introduction
- Cellular automata are mathematical models for complex natural systems containing large numbers of simple identical components with local interactions. They consist of a lattice of sites, each with a finite set of possible values. The values of the sites evolve synchronously in discrete time steps according to identical rules. The value of a particular site is determined by the previous values of a neighborhood of sites around it [10, 22]. There is a classification for CA that comparing their behavior with that of some continuous dynamic systems [27]. Wolfram specifies four classes of CA on the basis of qualitative criteria. For all initial configurations, Class 1 automata evolve after a finite time to a homogeneous state where each cell has the same value. Class 2 automata generate simple structures where some stable or periodic forms survive. Class 3 automata’s evolution leads, for most initial states, to chaotic forms. All other automata belong to Class 4 [5, 6]. Among two-dimensional and two-positions members of the class 4, Game of Life automata looks like a good candidate for modeling the behavior of complex systems. Conway proved its ability to simulate a Turing machine, using gliders and glider guns [6, 10]. Gliders are mobile self-localized patterns of non-resting states, and glider guns are patterns which when evolving alone, periodically recover their original shape after emitting some gliders. Glider gun emits a glider stream that carries information and can create logic gates and logical function through collisions [5, 6].In this paper with a brief introduction of CA and Game of Life, glider, and its characteristics as one of the patterns of Game of Life are described. After that, the implementation of logical gates and logical functions has been studied using this pattern. Finally, a method of text encryption is introduced, this method is based on the features glider and logical functions are implemented by them and it can be considered as one of the glider applications.
2. Cellular Automata
- A cellular automaton is a discrete model. It consists of a regular grid of cells, each in one of a finite number of states, such as "0" and "1". The grid can be in any finite number of dimensions. At this paper two dimensional CA are used. A 2- CA (2 dimensional cellular automata) can be defined as a 4-tuple [24]. Expression (1) shows this tuple.
 | (1) |
 | (2) |
 | Figure (1). CA neighborhood Von Neumann neighborhood moore neighborhood |
3. Game of Life
- In 1970, Conway discovered a special cellular automaton (that he called the Game of Life) that was later popularized by Gardner [6, 26]. The Game of Life is a two dimensional cellular automaton with binary cell states and Moore neighborhood. Each cell of the automaton takes either 0 or 1 state (can be called them living or dead) and updates its state in discrete time depending on the states of its eight closest neighbors and the four simple rules:1. Any live cell with fewer than two live neighbors dies. 2. Any live cell with two or three live neighbors, lives on to the next generation.3. Any live cell with more than three live neighbors dies. 4. Any dead cell with exactly three live neighbors becomes a live cells [6, 12]. The initial pattern as well as the rules of game generates next populations of game by births and mortalities in the lattice.
3.1. Game of Life Patterns
- It is possible to fill a lattice with 0s and 1s at random and allow the configurations to develop for a while find that after some time most patterns inhabiting the lattice can be classified as follows: 1. Stable pattern: They remain in unchanged if not disturbed. 2. Repeating pattern: They usually change their configuration in a very short cycle. These patterns can be mobile or immobile in lattice [12].Some examples of these two classes are shown in figure (2) [2, 18].
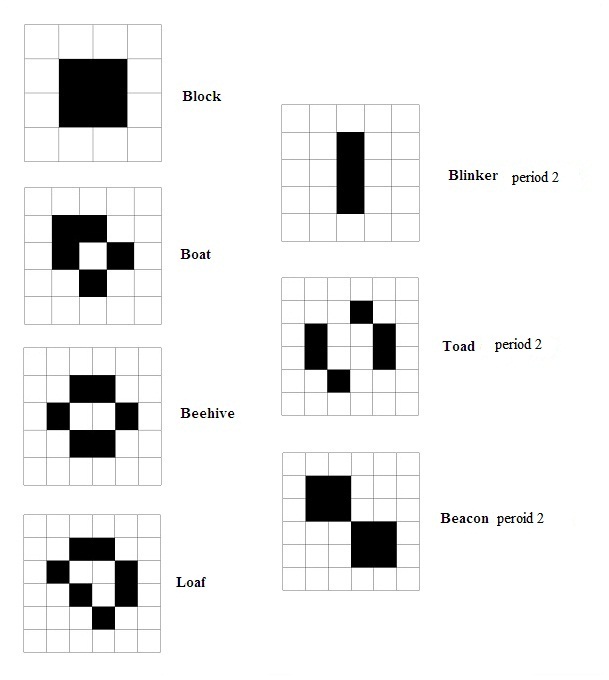 | Figure (2). Some examples of Game of Life pattern |
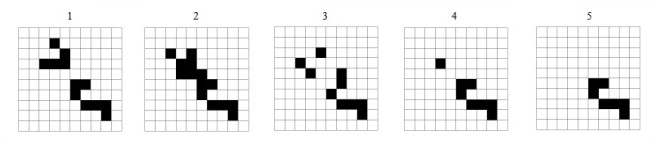
4. Glider
- The glider is a repeating pattern that travels across the lattice in Conway's Game of Life. Their movement is diagonal in cellular lattice [14] and after one period come back to initial pattern and this procedure continues [12, 15]. Therefore important feature of gliders is their movement in cellular lattice. Figure (3) shows a glider whit period 4 [9]. This glider is used in this paper.
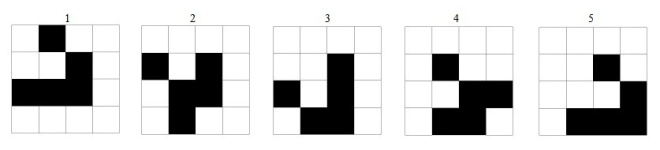 | Figure (3). Glider |
4.1. Glider Gun
- In a cellular automaton, a glider gun is a pattern with a main part that repeats periodically and that also periodically emits gliders [14]. A glider gun is localized pattern that periodically lose its stability and give birth to traveling mobile localization, gliders [19]. There are then two periods that may be considered: the period of the spaceship output, and the period of the gun itself, which is necessarily a multiple of the spaceship output's period [9]. A glider gun generates a glider in any period [2]. After some periods a stream of gliders is emitted in cellular lattice and this stream is mobile and the distance between both gliders is the same. This distance depends on the glider guns period. The shorter period of the gun, the less distance. Figure (4) shows a glider gun for the glider is shown figure (3). This gun emits a glider every 30th set of discrete time (period=30) [2, 17].
 | Figure (4). Glider gun |
4.2. Glider Collision
- A gun that emits gliders rightward is named right-gun and a gun that emits gliders leftward is named left-gun [2]. If a right-gun and a left-gun are placed side by side, their streams of glider will cancel each other as a result of glider collisions [8].When gliders are at the same vertically level when they collide with each other, the process of glider streams annihilation is two-phase. Firstly, collision of two gliders generates two 2*2 blocks. The gliders following the two previous ones crash into the blocks. The blocks and gliders disappear as result of the collision [2, 8]. This process takes a period of 27. For simplify and reduce the time, and also given that the application is considered in this paper, the simulation can be used for this collision. According to figure (5) collision between a glider and a block will cause the loss of both of them. The same feature can be used to simulate the collision among gliders. When two gliders place in position 23 of Figure (5), collisions among them can be predicted and with put the two blocks in the path, this collision is simulated. In this condition, number of steps to eliminate these two gliders is reduced to 5 steps. In this paper simulated collision will be used.
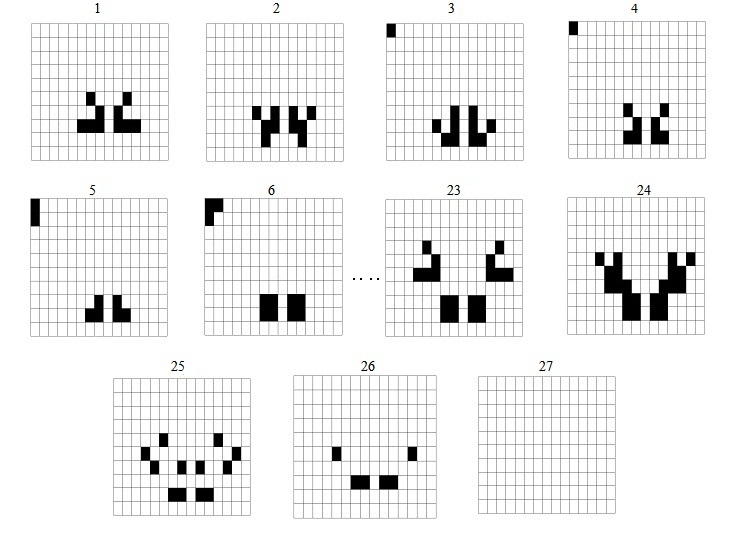 | Figure (5). Glider collision |
4.3. Eater
- Ideal eaters are periodic patterns that, after the absorption of a glider, can resume their original shape and position quickly enough to absorb another arriving glider [7]. Figure (6) shows an eater and collision with the glider. In this paper that eater will be used.
 | Figure (6). A eater that consume the glider |
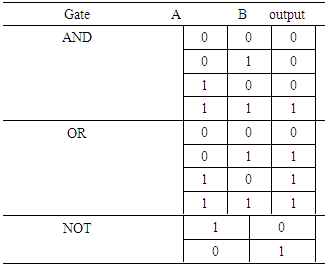
5. Implementation of Logical Gates
- Logic gates are binary operators with binary input and output. Important logical gates are AND, OR and NOT. These gates are shown in Table (1), A and B are gate inputs.
|
|
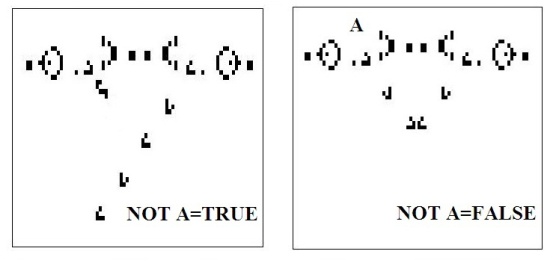 | Figure (7). Configurations of the automaton for various input values of the NOT-gate |
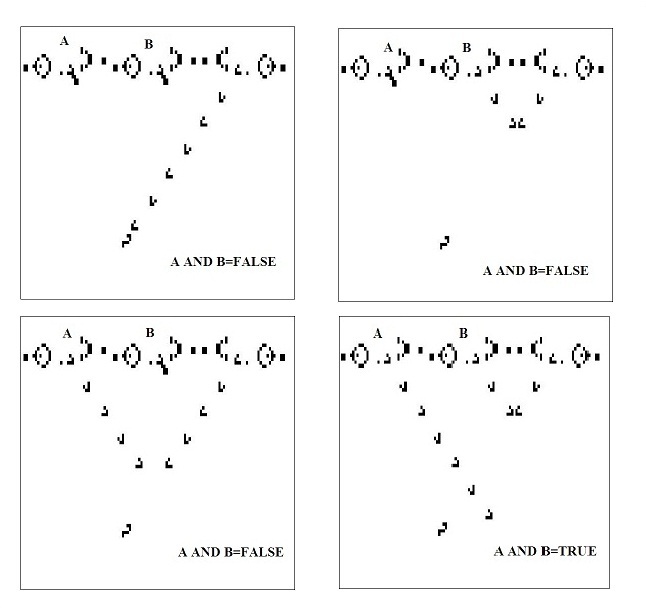 | Figure (8). Configurations of automaton for various input values of the AND-gate |
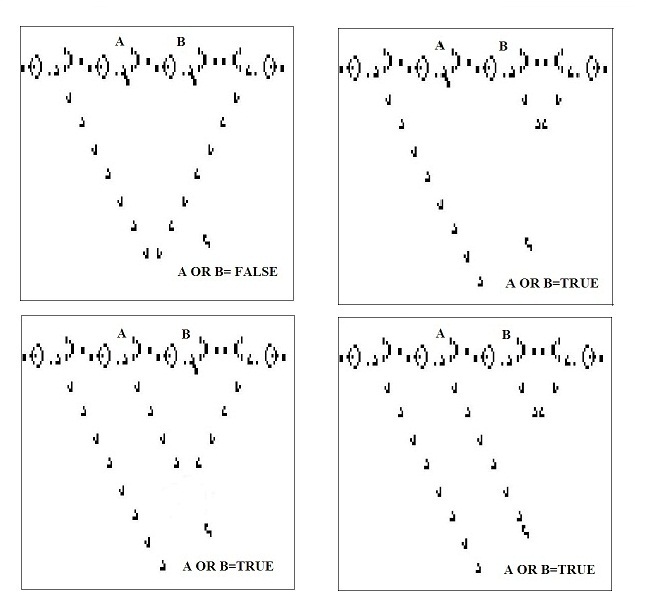 | Figure (9). Configurations of the automaton for various input values of the OR-gate |
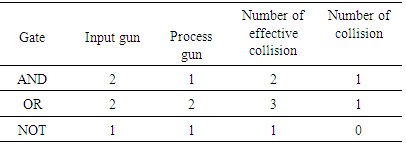
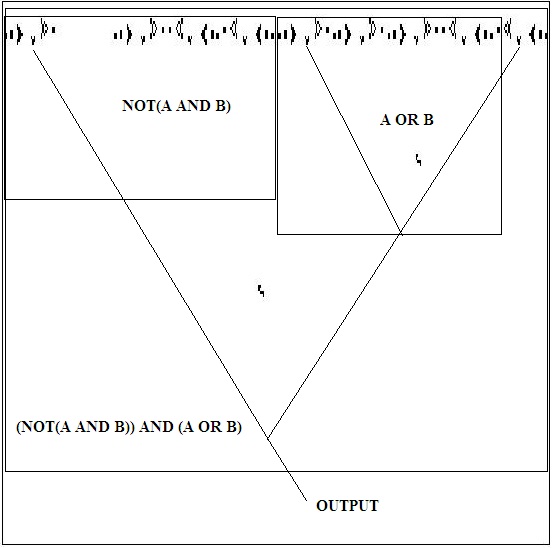
6. Implementation of Other Logical Functions
- Using the proposed gates, we can implement another logical gates and functions. In these implementations number of process guns should be considered. If number of the gun be less, the number of collisions would have been less and the output would have generated faster. Thus implementation of the logic function, using three main gates, should have minimum necessary gun.
6.1. XOR Implementation
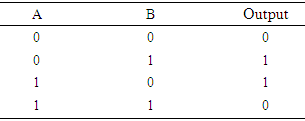
- The XOR operator is shown in Table (3). There are some combinational logic functions for this gate. To implement this gate using gliders in CA, we should find a logical function that needs lowest guns. For example, we compare expression (2) and expression (3) [2].
|
 | Figure (10). Implementation of XOR gate |
7. Text Encryption
- In the previous sections the glider concepts and implementation of logic functions were described. In this section a text encryption method is described that is based on the glider concepts in the Game of Life.
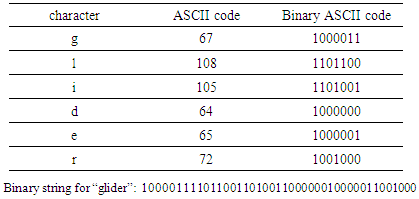
7.1. Text-to-Glider
- The first step is to convert text to the glider stream. According to unique nature of ASCII code for all characters, any character can be indicated by 7 binary bits. This binary string is equivalent to character s ASCII code. Now this string can be converted to glider steam. This conversion is done by considering the following two rules:Ÿ In binary string, 1 is equal to one glider in glider stream.Ÿ In binary string, 0 is equal to a missing glider in glider stream.The same procedure can be converted the text to the glider stream.For example conversion of “glider” to its equivalent glider stream is shown in Table (4).
|
7.2. Select the Encryption Key
- In the second step, a proper key should be selected for the encryption. This key can be generated randomly by a random number generator. Then the key must be converted to corresponding glider stream. For this conversion we should convert binary key to corresponding glider stream. Also the key can be a string of characters that should be converted to glider stream. This conversion is similar to conversion of plain text to glider stream. If the length of key is shorter than the length of text, repeat of the key can be used.
7.3. Cryptographic Operation
- Two glider streams produced in sections 7-2 and 7-3 are used as inputs XOR gate design in figure (10). Output will be as a stream of gliders that can convert to encrypted text and method of this conversion is the reverse conversion method of plain text to glider stream. For decoding, this process is repeated but one input of XOR gate will be corresponding glider stream of encrypted text.
8. Conclusions
- This paper reviews the features of glider in the Game of Life CA. It showed how to simulate the basic logical gates based on CA and Game of Life rules. The main point in this simulation is feature of gliders and their moving in CA. We can also combine these basic gates to implement other logical gates and functions in CA. By expanding on the multi-bits input for the gates, implementation of binary calculations will be possible in CA. Emitted gliders can be controlled by eater and block and this help us to mapping text to glider. Therefore implementation of non binary discussion is possible in CA. The glider stream can contain a text. We can encrypt this text by features of glider. Encryption function is XOR gate and encryption key is generated randomly. Also decryption function is XOR gate and it implement by glider. So this method is based on only three rules of Game of Life.