| [1] | M. Faifer, L. Cristaldi, L. Piegari, and P. Soulatiantork, "Design of a converter for photovoltaic modules testing," Clean Electrical Power (ICCEP), 2015 International Conference on, Taormina, 2015, pp. 674-681. DOI: 10.1109/ICCEP.2015.7177564. |
| [2] | L. Cristaldi, M. Khalil, P. Soulatiantork, “A root cause analysis and a risk evaluation of PV balance of systems failures”, The International Measurement Confederation Journal (IMEKO), Vol. 6, No.4, pp. 113-120, Dec 2017. DOI: http://dx.doi.org/10.21014/acta_imeko.v6i4.425. |
| [3] | Cristaldi, M. Khalil, M. Faifer, P. Soulatiantork, “Markov process reliability model for photovoltaic module encapsulation failures”, 4th international conference on renewable energy research and applications, Palermo, Italy, pp. 22-25 Nov 2015. DOI: 10.1109/ICRERA.2015.7418696. |
| [4] | Zhu, Y.; Kim, M.K.; Wen, H. Simulation and Analysis of Perturbation and Observation-Based Self-Adaptable Step Size Maximum Power Point Tracking Strategy with Low Power Loss for Photovoltaics. Energies 2019, 12, 92. |
| [5] | Loukriz, A., Messalti, S. & Harrag, A. Design, simulation, and hardware implementation of novel optimum operating point tracker of PV system using adaptive step size. Int J Adv Manuf Technol 101, 1671–1680 (2019). |
| [6] | Meenakshi Sundaram, B., Manikandan, B.V., Praveen Kumar, B. et al. Combination of Novel Converter Topology and Improved MPPT Algorithm for Harnessing Maximum Power from Grid Connected Solar PV Systems. J. Electr. Eng. Technol. 14, 733–746 (2019). |
| [7] | J.H.R. Enslin, M.S. Wolf, D.B. Snyman, and W. Swiegers. "Integrated photovoltaic maximum power point tracking converter", IEEE Transactions on Industrial Electronics, 44(6): 769–773, 1997. |
| [8] | W. Xiao, W.G. Dunford, P.R. Palmer, and A. Capel., "Application of centered differentiation and steepest descent to maximum power point tracking", IEEE Transactions on Industrial Electronics, 54(5): 2539–2549, 2007. |
| [9] | T. Noguchi, et al., "Short-current pulse-based adaptive maximum power point tracking for a photovoltaic power generation system, Elect. Eng. Japan 139 (1) (2002) 65–72. |
| [10] | H. E. S. A. Ibrahim, F. F. Houssiny, H. M. Z. El-Din and M. A. El-Shibini, "Microcomputer controlled buck regulator for maximum power point tracker for DC pumping system operates from photovoltaic system," Fuzzy Systems Conference Proceedings, 1999. FUZZ-IEEE '99. 1999 IEEE International, Seoul, South Korea, 1999, pp. 406-411 vol.1. |
| [11] | Pongsakor T., Somyot K. and Chaiyan J. "Maximum Power Point Tracking Using Fuzzy Logic Control for Photovoltaic Systems". proceeding of the International MultiConf of Engineers and Computer Scientists 2011 vol.2, IMECS, Hong kong, 2011. |
| [12] | Hiyama T., Kouzum S. a "Identification Of Optimal Operating Point Of PV Modules Using Neural Network For Real Time Maximum Power Tracking Control, " IEEE Trans. Energy Convers., vol. 10, no. 2, , Jun. 1995. pp. 360–367. |
| [13] | L. Cristaldi, M. Faifer, M. Rossi, S. Toscani “MPPT Definition and Evaluation: A New Model-Based Approach” in Proc. IEEE Int. Instrum. Meas. Technol. Conf., Graz, Austria, May 13-16, 2012, pp.594–599. |
| [14] | L. Cristaldi, M. Faifer, M. Rossi, and S. Toscani, "A simplified model of a photovoltaic module,” in Proc. Int. Instrum. Meas. Technol. Conf., May 2012, pp. 431–436. |
| [15] | M. Faifer, L. Cristaldi, S. Toscani, P. Soulantiantork and M. Rossi, "Iterative model-based Maximum Power Point Tracker for photovoltaic modules," 2015 IEEE International Instrumentation and Measurement Technology Conference (I2MTC) Proceedings, Pisa, 2015, pp. 1273-1278. DOI: 10.1109/I2MTC.2015.7151456. |
| [16] | L. Cristaldi, M. Faifer, M. Rossi and S. Toscani, "An Improved Model-Based Maximum Power Point Tracker for Photovoltaic Modules," in IEEE Transactions on Instrumentation and Measurement, vol. 63, no. 1, pp. 63-71, Jan. 2014. |
| [17] | P. Soulatiantork, ‘Performance comparison of a two PV module experimental setup using a modified MPPT algorithm under real outdoor conditions’, Solar Energy, Volume 169, 15 July 2018, pp. 401-410. |
| [18] | P. Soulatiantork, L. Cristaldi, M. Faifer, C. Laurano, R. Ottoboni, S. Toscani, A Tool for Performance Evaluation of MPPT Algorithms for Photovoltaic Systems, Measurement, 2018, ISSN 0263-2241, https://doi.org/10.1016/j.measurement.2018.07.005. |
| [19] | Soulatiantork, P., 2016. Experimental Performance Evaliation of MPPT Algorithms for Photovoltaic Systems. P.h.D theses, Politecnico di Milano, Milano, Italy. |
| [20] | P. Solatian, S. Hamidreza Abbasi, and F. Shabaninia, “Simulation Study of Flow Control Based on PID ANFIS Controller for NonLinear Process Plants,” Am. J. Intell. Syst., vol. 2, no. 5, pp. 104–110, 2012 |
| [21] | Payam Soulatiantork, Alireza Alghassi, Marco Faifer, Suresh Perinpanayagam, IGBT Thermal Stress Reduction Using Advance Control Strategy, Procedia CIRP, Volume 59, 2017, Pages 274-279. https://doi.org/10.1016/j.procir.2016.09.040. |
| [22] | Q. Mei, M. Shan, L. Liu, and J. M. Guerrero, "A novel improved variable step-size incremental-resistance MPPT method for PV systems, " IEEE Trans. Ind. Electron., vol. 58, no. 6, pp. 2427–2434, Jun. 2011. |
| [23] | A. Safari and S. Mekhilef, "Simulation and hardware implementation of incremental conductance MPPT with direct control method using cuk converter, " IEEE Trans. Ind. Electron., vol. 58, no. 4, pp. 1154–1161, Apr. 2011. |
| [24] | Alireza Alghassi, Payam Soulatiantork, Mohammad Samie, Adrian Uriondo Del Pozo, Suresh Perinpanayagam, Marco Faifer, Fault Tolerance Enhance DC-DC Converter Lifetime Extension, Procedia CIRP, Volume 59, 2017, pp 268-273. https://doi.org/10.1016/j.procir.2017.02.014. |
| [25] | M. Faifer, M. Khalil, L. Piegari, P. Soulatiantork, S. Toscani, " Improvement in the efficiency of DC-DC power converters by controlling the switching frequency," in proceeding of IMEKO TC10 Workshop on Technical Diagnostics, Advanced measurement tools in technical diagnostics for, systems' reliability and safety, Milan, Italy, June 2016. |
| [26] | D. Shmilovitz, "On the control of photovoltaic maximum power point tracker via output parameters," in IEE Proceedings - Electric Power Applications, vol. 152, no. 2, pp. 239-248, 4 March 2005. |
| [27] | R. Sankarganesh and S. Thangavel, "Maximum power point tracking in PV system using intelligence based P&O technique and hybrid Cuk converter," Emerging Trends in Science, Engineering, and Technology (INCOSET), 2012 International Conference on, Tiruchirappalli, Tamilnadu, India, 2012, pp. 429-436. |
| [28] | M. A. Elgendy, B. Zahawi and D. J. Atkinson, "Assessment of Perturb and Observe MPPT Algorithm Implementation Techniques for PV Pumping Applications," in IEEE Transactions on Sustainable Energy, vol. 3, no. 1, pp. 21-33, Jan. 2012. |
| [29] | T. Tafticht, K. Agbossou, M. L. Doumbia, and A. Chériti, "An improved maximum power point tracking method for photovoltaic systems", Renew. Energy, vol. 33, pp. 1508–1516, 2008. |
| [30] | A. Safari and S. Mekhilef, "Simulation and hardware implementation of incremental conductance MPPT with direct control method using Cuk converter," IEEE Trans. Industrial Electronics., vol. 58, no. 4, pp. 1154–1161, Apr. 2011. |
| [31] | K. H. Hussein, I. Muta, T. Hoshino, and M. Osakada, "Maximum photovoltaic power tracking: An algorithm for rapidly changing atmospheric conditions, " in Proc. Inst. Elect. Eng., Generation, Transmission and Distribution, 1995, vol. 142, pp. 59–64. |
| [32] | N. Femia, G. Petrone, G. Spagnuolo, M. Vitelli, "Optimization of perturb and observe maximum power point tracking method", IEEE Trans. Power Electron. 20 (4) (2005) 963–973. |

 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTML

 and on the right side the slope is negative
and on the right side the slope is negative  as can be written as the following equation.
as can be written as the following equation. 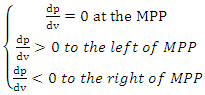
 the equation can be rewritten as,
the equation can be rewritten as,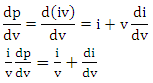
 and instantaneous conductance
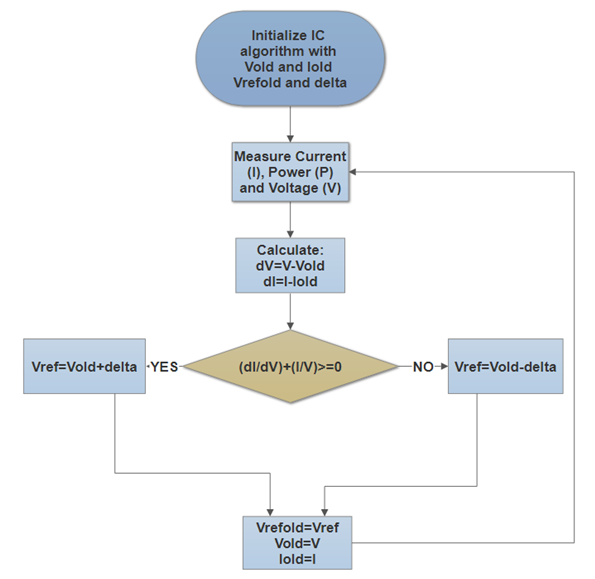
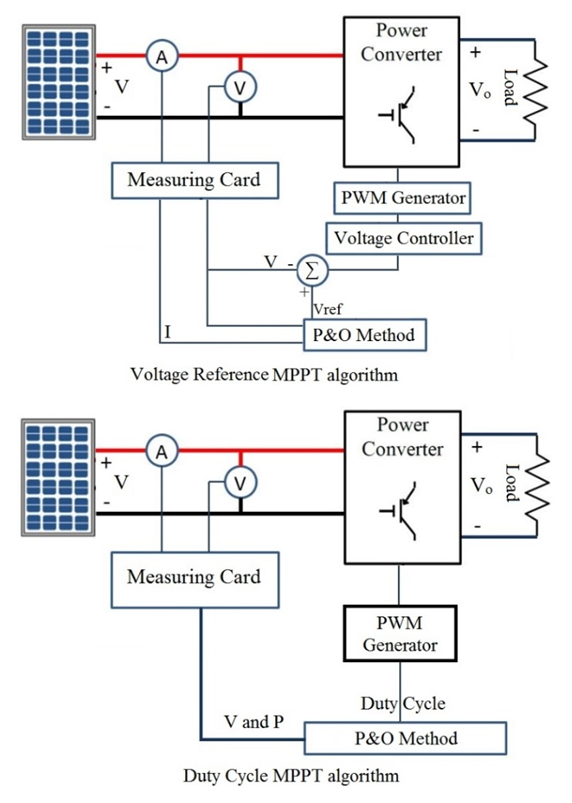
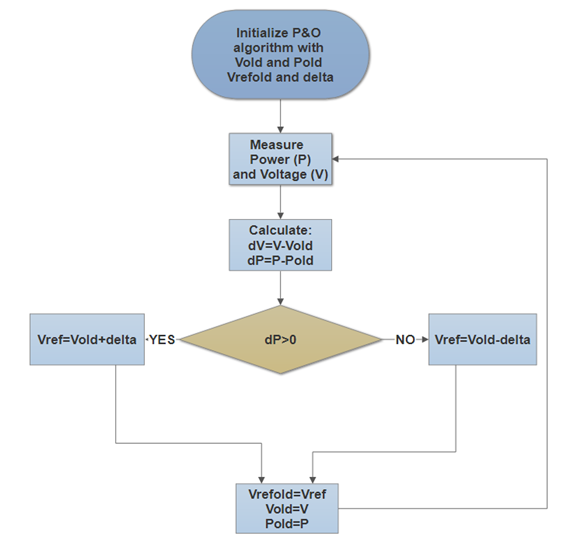
and instantaneous conductance  is zero at the MPP. The same as a P&O algorithm, two techniques can be used to implement the IC MPPT algorithm as shown in Figure 4. Due to the mentioned reasons in the previous section, the reference voltage is selected as the control parameter. As shown in Figure 6, the algorithm increases or decreases the reference voltage by comparing the incremental conductance
is zero at the MPP. The same as a P&O algorithm, two techniques can be used to implement the IC MPPT algorithm as shown in Figure 4. Due to the mentioned reasons in the previous section, the reference voltage is selected as the control parameter. As shown in Figure 6, the algorithm increases or decreases the reference voltage by comparing the incremental conductance  and
and  . Several studies use the condition that
. Several studies use the condition that  It must be taken into account that this assumption is acceptable only if we neglect the dynamic of the MPPT algorithm and the noise of the system. In addition, it is not possible to find stable environmental conditions. For an experimental PV testing system, the last mentioned condition is not acceptable. Therefore in this paper, the IC algorithm strategy as shown in Figure 6 has been used.
It must be taken into account that this assumption is acceptable only if we neglect the dynamic of the MPPT algorithm and the noise of the system. In addition, it is not possible to find stable environmental conditions. For an experimental PV testing system, the last mentioned condition is not acceptable. Therefore in this paper, the IC algorithm strategy as shown in Figure 6 has been used.