-
Paper Information
- Next Paper
- Previous Paper
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
International Journal of Energy Engineering
p-ISSN: 2163-1891 e-ISSN: 2163-1905
2013; 3(2): 74-96
doi:10.5923/j.ijee.20130302.05
A GA-ANFIS Self Regulating Scheme for Induction Motor Filter Compensation
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLAhmed M. Othman1, Adel M. Sharaf2
1Electrical Power & Machine Department, Zagazig University, Zagazig, 44519, Egypt
2Department of Electrical and Computer Engineering, School of Science and Engineering, Habib University, Karachi, Pakistan
Correspondence to: Ahmed M. Othman, Electrical Power & Machine Department, Zagazig University, Zagazig, 44519, Egypt.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
The paper presents a Novel Green Plug-Filter Compensation Scheme developed by the Second Author and controlled by an integrated Genetics algorithm (GA) with Adaptive Neuro-Fuzzy Inference System (ANFIS) controller developed by the First Author for gain adjusting of a PID tri-loop stage control scheme applied on single phase Induction motor. A Tri Loop dynamic error controlled technique is used to reduce inrush current conditions, improve energy utilization, ensure soft starting, reduce inrush current as well as effectively ensure motor dynamic speed tacking.The proposed technique is used to adjust the feeding of PWM switching of GP-FC by finding the optimal control gain settings that dynamically minimize the global dynamic error. Digital simulations are provided to validate the effectiveness of this device in improving the power quality and system stability.
Keywords: Adaptive Neuro-Fuzzy Inference System (ANFIS), Dynamic Green Plug-Modulated Filter Compensator, Genetic Algorithm (GA), Green Power Filter, Tri-loop Dynamic Control
Cite this paper: Ahmed M. Othman, Adel M. Sharaf, A GA-ANFIS Self Regulating Scheme for Induction Motor Filter Compensation, International Journal of Energy Engineering, Vol. 3 No. 2, 2013, pp. 74-96. doi: 10.5923/j.ijee.20130302.05.
Article Outline
1. Introduction
- A novel Green Plug-Modulated Filter Compensator (GP-FC) is used as green energy efficient plug compensation scheme. The Simple modulated filter/Capacitor compensation scheme, developed by the Second Author and controlled by an integrated Genetics algorithm (GA) with Adaptive Neuro-Fuzzy Inference System (ANFIS) controller developed by the First Author, is a member of a family of Energy efficient, Soft Starting Switched/Modulated FACTS based Compensation Devices for single phase and three phase motorized, inrush and nonlinear loads. Active and Reactive powers have direct impact on the energy efficiency, efficient utilization, power factor, power quality and voltage profile of the system. There are many techniques to supply and compensate for load reactive power requirements needed by nonlinear/inrush/motorized type loads. So fast control action is needed. By building on technologies developed for FACTS and LC Switched Compensators and high-power CSI and VSI-electronic converters and drives, it is offered a number of advantages in control of power systems, including speed and accuracy of the controlled response. Advanced control and improved semiconductor switching of these devices have provided distinguished solutions for power quality enhancement[1]-[5].The functions of the Energy Efficient, soft starting and reactive compensation green plug scheme can be power factor correction, power quality enhancement, efficient utilization, dynamic voltage control, inrush current reduction and dynamic speed reference tracking. GP-FC may be used in AC power system for various applications, from controlling reactive power to the system to improving voltage regulation and power factor by reducing transient/inrush content in voltage and current supplied to the dynamic nonlinear/inrush type motorized load. Beside the power demand requirements, some contingencies and negative sequence /ripple content are among other factors that are crucial when it happens to power quality issue[6],[7]. The most important point is to find the optimal dynamic self- regulating switching patterns for the GP-FC devices, this selection can be adapted by AI trends. In recent years, AI theory applications have received increasing attention in various areas of power systems such as operation, planning, and control. The effect of different controllers as conventional and adaptive AI controllers can be compared to conclude the most effective controller.The main benefit in using the genetics algorithm is the ability of GA to reach the optimal solutions, which guarantees that if the GA is well self designed and trained that will lead to the most achieved level from the desired performance for the system under any problem space. About the Adaptive Neuro-Fuzzy Inference (ANFIS), we can first state that ANFIS is a merging system between the neural network system and fuzzy logic system. Therefore, it has the resultant benefits of both systems. The fuzzy system is a very efficient tool in the controlling actions and the neural networks (NN) are powerful in patterns classifications and patterns recognitions. The NN can be merged with the fuzzy system to adapt the parameters of the fuzzy systems to reach the best collection of fuzzy parameters lead to the required controlling procedure. Therefore, we get the positive options from each AI system and merge them to get the global benefits.The electromechanical modes of the system can be a good indicator for the dynamic response; the speed deviation response (Δω) and the mechanical rotor angle response (Δδ) can be shown. The study system response for the operating cases with related GP-FC parameters will show the effect to get the significant setting of those parameters to enhance the response. Without adapting the GP-FC parameters, we may loss the benefits that we got from installing the GP-FC, where may impair the system response[8]-[13].The paper validated a novel switched filter Green Plug-Filter Compensator (GP-FC) scheme using a dynamic Multi-Loop Error Driven regulator to improve the power quality and utilization in Distribution/Utilization Systems, especially for single phase induction motor. The pulsing sequence of GP-FC utilizes the tri-loop dynamic error-driven weighted modified PID controller to control it. GP-FC scheme proved very effective in improving the power quality, enhancing power factor, reduce transmission losses and limit transient over voltage and inrush current conditions on the AC interconnected system.
2. Green Plug-Filter Compensator (GP-FC) scheme
- The novel FACTS GP-FC device is a switched/modulated filter-capacitor compensator, it has two main schemes, as shown in Figure 1 and Figure 2, based mainly on a combination of capacitors connections and MOSFET switches.
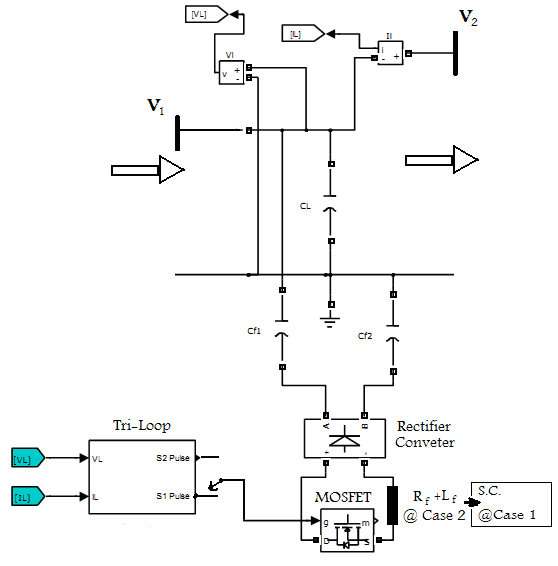 | Figure 1. Scheme I of GP-FC |
 | Figure 2. Scheme II of GP-FC |
3. Case System Description
- The digital simulations usingMatlab/Simulink/Sim-Power Software Environment is applied to the Sample AC Study System, which has AC source with 240 volt and transmission line represented with Rs and Ls to supply single phase capacitor run induction motor. Figure 3 depicts a single line diagram of the studied AC system. The detail parameters of the system are given in Appendix. The Sample Study System is controlled by applications of both scheme I and scheme II of switched smart filter compensated device using Green Plug Filter Compensator GP-FC devices to the SPIM Load.
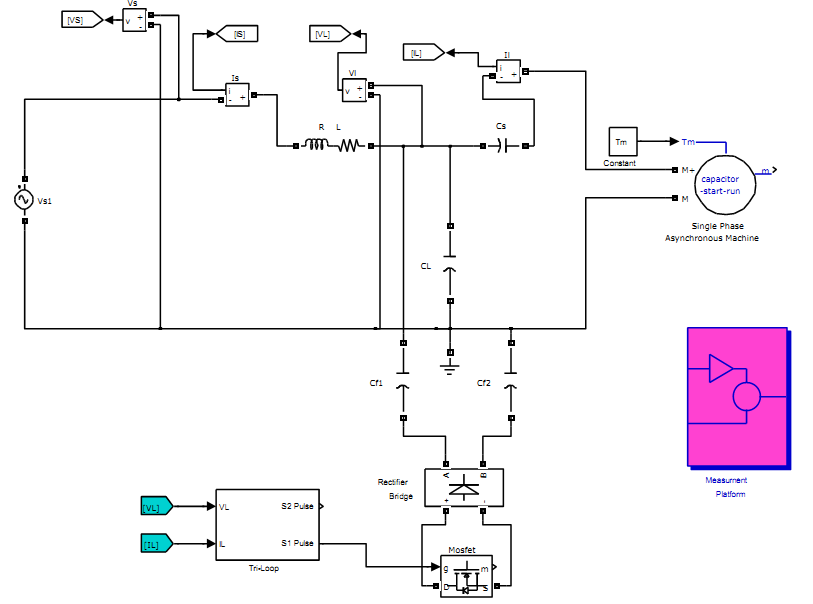 | Figure 3. Concerned system with Single Phase IM loads |
4. Proposed Tri-Loop Dynamic Error-Driven PID
- The dynamic controller based on Tri-loop driven error is used to modulate the switched filter compensator. The resultant of error signal is directed to feed the control unit of modulating signal to the PWM switching block which acts on the MOSFET gate to control the modified VSC controller as shown in Figures 4 and 5.The global error is the resultant of the four individual multi error loops including voltage stabilization, inrush current limiting and synthesize dynamic power loops. Each multi dynamic leading loop is used to minimize the global error based on a tri-loop functional error signal in addition to other supplementary motor current limiting and or feeder currents for loss reduction.The four loops can be briefly explained as:1. VL- Load Bus Voltage Stabilization Loop by tracking the error of the load voltage and regulating the voltage to near unity.2. IL-Dynamic RMS-Current Minimisation Loop to compensate any sudden current change that may be caused by inrush current, induction motor starting current.3. PL-Excursion Damping Loop.4. IL- Motor Load Inrush/Ripple/Transient Current Damping Loop to reduce the harmonic ripple content in the distribution system.To enhance the dynamic response of the system, Integrated Genetics algorithm (GA) with Adaptive Neuro-Fuzzy Inference System (ANFIS) system will be applied to control the parameter settings of PID section to fine-tune the system dynamic response. Figure 6 depict a novel integrated Genetics algorithm (GA) with Adaptive Neuro-Fuzzy Inference System (ANFIS) controller to self-regulate PID tri-loop stage for Green Plug-Filter Compensator (GP-FC) Device applied on single phase Induction motor. The proposed technique is used to accomplish a better feasibility and efficiency where it can realize both criteria of power saving as well as quality improvement of the source current and load voltage and dynamic reactive compensation for the single phase induction motor loads.The main benefit in using the genetics algorithm is the ability of GA to reach the optimal solutions, which guarantees that if the GA is well self designed and trained that will lead to the most achieved level from the desired performance for the system under any problem space. About the Adaptive Neuro-Fuzzy Inference (ANFIS), we can first state that ANFIS is a merging system between the neural network system and fuzzy logic system. Therefore, it has the resultant benefits of both systems[14]-[18]. The fuzzy system is a very efficient tool in the controlling actions and the neural networks (NN) are powerful in patterns classifications and patterns recognitions. The NN can be merged with the fuzzy system to adapt the parameters of the fuzzy systems to reach the best collection of fuzzy parameters lead to the required controlling procedure. Therefore, we get the positive options from each AI system and merge them to get the global benefits[19]-[21]. The structure of the adaptive controller can be presented in working layers. As the neural network layer can be considered as co-operative with the fuzzy logic layer to construct ANFIS system. Where the genetics algorithm system is co-operative layer for the totally ANFIS system as a pre-training tool provides ANFIS the training patterns.
 | Figure 4. Internal Structure of PID |
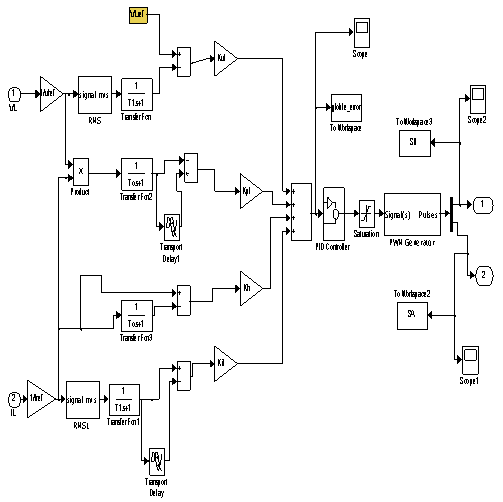 | Figure 5. Dynamic controller based on Tri-loop driven error |
 | Figure 6. Working Layers of the adaptive controller |
5. Simulation Results
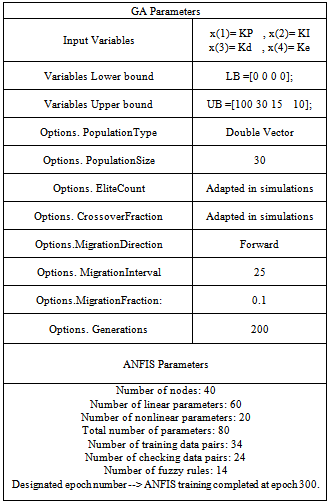
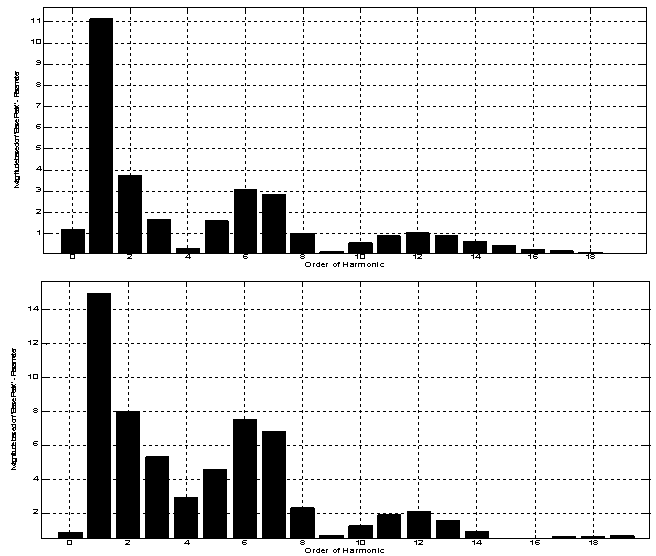
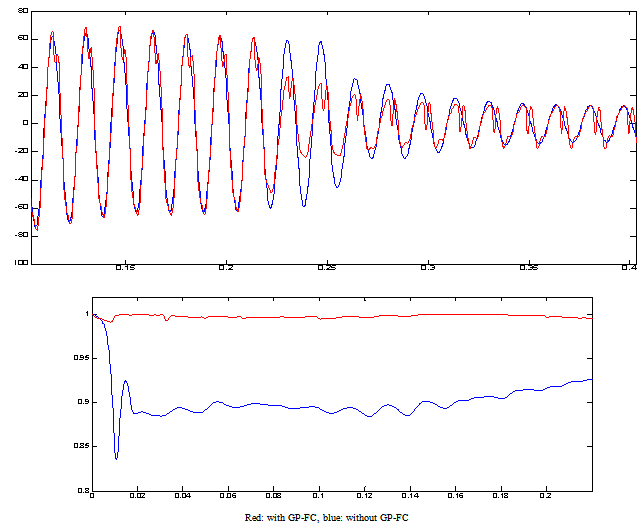
- The MATLAB/SIMULINK/SimPower Platform is used as environment for the proposed GP-FC for the two different schemes. The digital simulation is carried out with and without the controlled GP-FC located in order to show its performance in voltage stabilization, harmonic reduction and reactive power compensation at normal operating condition. Table 1 indicates the GA and ANFIS system parametes. And Figure 7 shows the measurment platform of the system. The dynamic responses of voltage, current, active power, reactive power, apparent power, power factor, frequency spectrum (for voltage and current), (THD)v and (THD)i at source bus and load with Comparison of harmonics at each bus are made in case of with and without GP-FC, as in Figures 8-23. Voltage and current harmonic analysis in term of the total harmonic distortion (THD) is given. It is obvious that the voltage harmonics are significantly reduced, also the THD of current waveform at each bus is decreased.
|
 | Figure 7. System Measurement Platform |
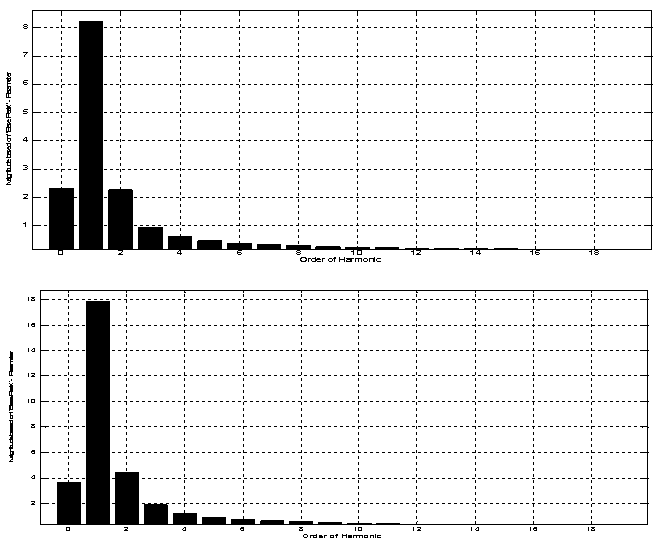
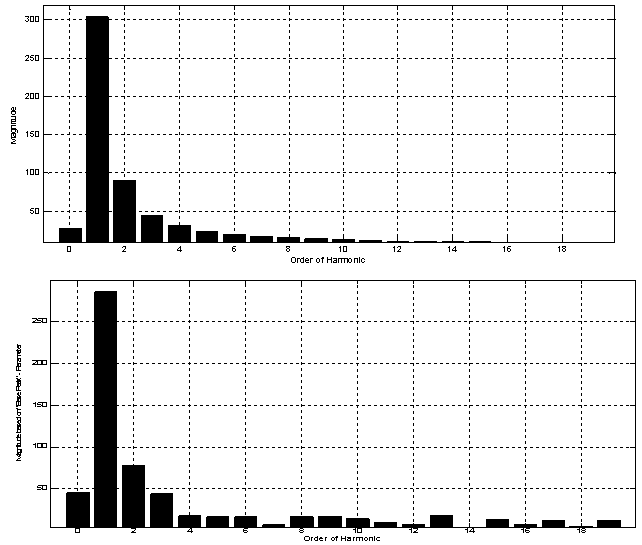 | Figure 8. Vs FTT, with THD=0.68% then Vl FTT , with THD=15.41% |
 | Figure 9. Is FTT, with THD=9.48% then Il FTT , with THD=9.48% |
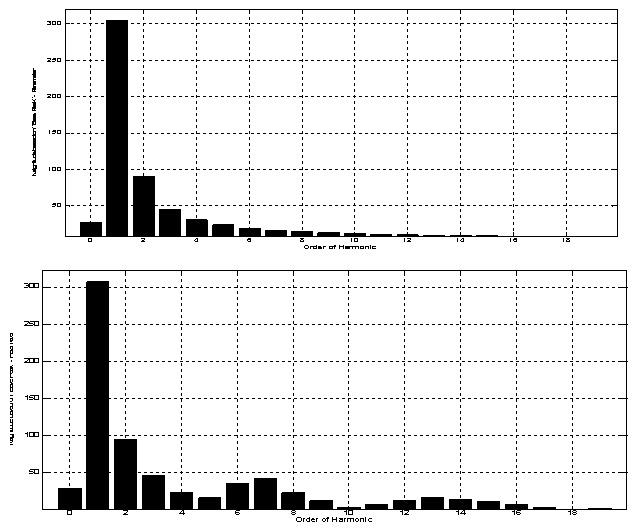 | Figure 10. Vs FTT, with THD=0.53 % then Vl FTT , with THD=7.44% |
 | Figure 11. Il FTT, with THD=7.2 % then Is FTT , with THD=1.5 % |
 | Figure 12. Vload with time then Vload with more zoom in snapshot |
 | Figure 13. Iload with time then Source PF with time |
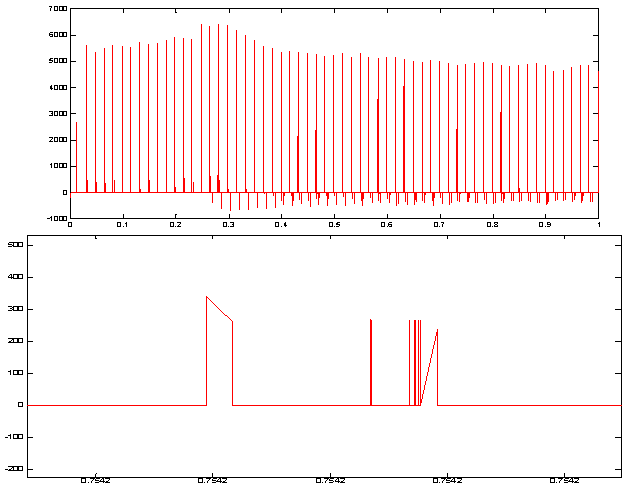 | Figure 14. ICf1(mA) time then ICf1 with more zoom in snapshot |
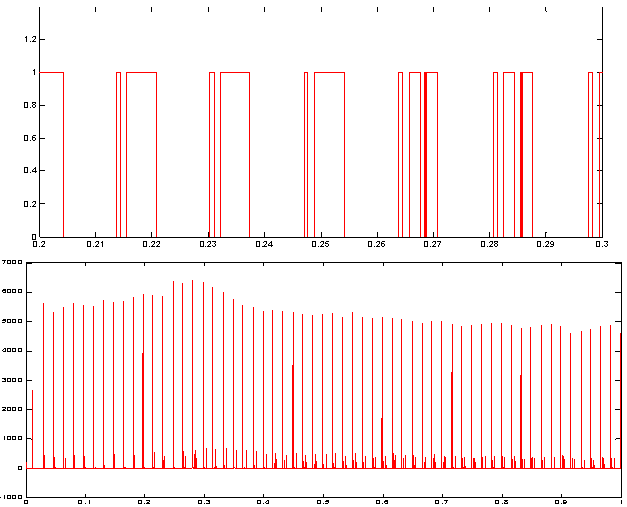 | Figure 15. S1 pulses of MOSFET then IS1 of MOSFET |
 | Figure 16. IS1 zoom in snapshot then error signal of tri-loop with time |
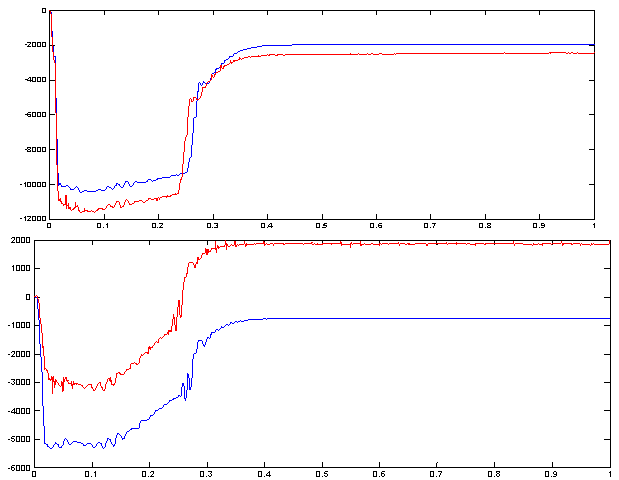 | Figure 17. Source Active power then Source reactive power |
 | Figure 18. Vs FTT, with THD=0.68% then Vl FTT , with THD=6.46% |
 | Figure 19. Il FTT, with THD=6.55 % then Is FTT , with THD=1.2 % |
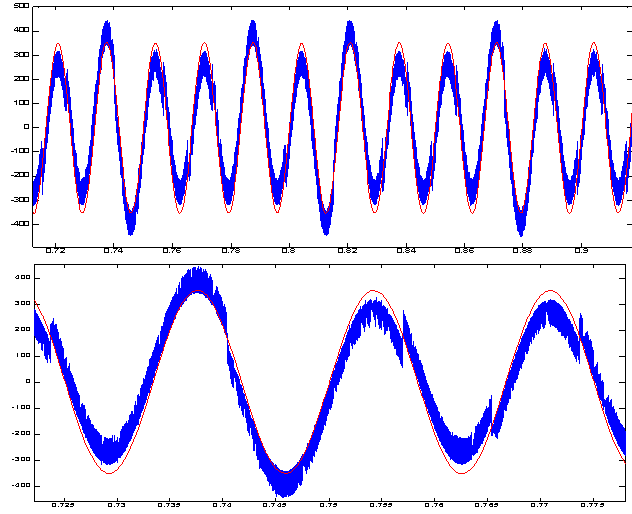 | Figure 20. Vload with time then Vload with more zoom in snapshot |
 | Figure 21. Iload with time then Isource with time |
 | Figure 22. PFsource with time then Qsource (var) with time |
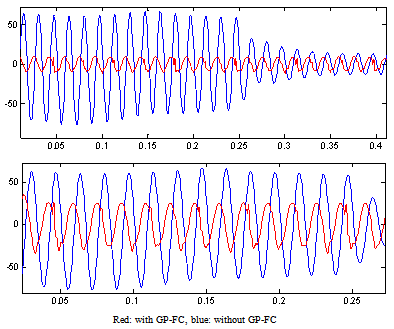
 | Figure 23. ICl with time then error signal of tri-loop |
6. Conclusions and Extensions
- This paper presents a novel FACTS based Device GP-FC developed by the Second Author and controlled by an integrated Genetics algorithm (GA) with Adaptive Neuro-Fuzzy Inference System (ANFIS) controller developed by the First Author for Soft Starting, Energy Efficient Utilization, Loss Reduction/Power Factor Correction, power quality improvement and power factor correction.Integrated Genetics algorithm (GA) with Adaptive Neuro-Fuzzy Inference System (ANFIS) controller to dynamically regulate the gains of the PID tri loop stage for Green Plug-Filter Compensator (GP-FC) Device applied on single phase Induction motor. A Tri Loop dynamic error controlled technique is applied to minimize overloading and high inrush motor currents, in addition to regulate motor dynamic speed ensuring efficient utilization and system stability. The proposed technique is used to adjust the feeding of PWM switching of GP-FC by finding the optimal control gain settings that dynamically minimize the absolute value of the global dynamic error. Digital simulations are provided to validate the effectiveness of this device in improving the power quality and system stability. Inappropriate parameters of the PID can affect the dynamic performances of the system, so it is important to adapt them in real time. The integrated GA with ANFIS technique is used to adjust controllers’ gains to minimize total absolute error.The same device is being extended to three phase utilization motorized/nonlinear/inrush type/switched type loads as well as other topologies for three phase Feeder Loss Reduction, Voltage Regulation, Power Quality and Power Factor Correction for Distributed Renewable Energy-Smart Grid Applications
Appendix
- Appendix for Simulated System Parameters
