-
Paper Information
- Previous Paper
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
International Journal of Electromagnetics and Applications
2012; 2(4): 73-76
doi: 10.5923/j.ijea.20120204.05
Split Phase SPIM Characteristics Optimization using PSO Algorithm
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-Text HTML
Full-Text HTMLM. A. Taghikhani
Department of Engineering, Imam Khomeini International University, Qazvin, Iran
Correspondence to: M. A. Taghikhani , Department of Engineering, Imam Khomeini International University, Qazvin, Iran.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
The application of particle swarm optimization (PSO) in parameters design of a split-phase single-phase induction motor is proposed in this paper. The PSO considers the motor efficiency as objective function and five performance related items as constraints. The main advantages of the proposed technique are; its simple structure and its straightforward verification of maximum efficiency of induction motor for a given output power. The PSO algorithm was implemented on a test motor and therefore, a code has been provided under MATLAB software. The results show that the PSO method gives more suitable design optimization against conventional methods.
Keywords: Design Optimization, Single Phase Induction Motor (SPIM), Maximum Efficiency, Particle Swarm Optimization (PSO)
Article Outline
1. Introduction
- Presently, millions of SPIMs in smaller sizes are in the commercial and domestic field. Therefore, even a minor improvement in the design of this kind of motors may save a vast electrical energy worldwide[1]. There are many types of SPIMs, depending upon the starting arrangement provided with the motor. Advances in the design of these motors have made an improvement in the power factor and efficiency of the motor. Split-phase, capacitor-start, shaded-pole and repulsion-type motors are quite popular from industrial viewpoint. Split phase single phase induction motor design is studied in this paper.A number of works have reported the improvement of SPIMs efficiency so far. Active power loss effect in induction motor optimum design has proposed in[2]. The method of boundary search along active constraints and the Han-Powell method for optimization of single phase induction motor design have been presented in[3,4]. A triac-based drive with an optimal efficiency voltage controller is proposed in[5]. An appropriate method for motor efficiency maximization control, combined with a variable-speed drive, has been presented in[6]. Electrical machine design optimization using genetic algorithm has discussed in[7]. Some of the evolutionary algorithms for optimal design are available in the literatures[8-11].This paper proposes a method for design optimization of single-phase induction motor to maximize the efficiency using particle swarm optimization (PSO). The present paper will be organized as follows. Section 2 briefly explains PSO algorithm. Section 3 presents relationships governing single-phase induction motor. Section 4 discusses the optimal design with variables and constraints. Section 5 gives the detailed discussion on the results of PSO algorithm and their comparison with conventional design.
2. Particle Swarm Optimization
- PSO is a population-based, stochastic optimization algorithm based on the idea of a swarm moving over a given landscape. The algorithm adaptively updates the velocities and members positions of the swarm by learning from the good experiences. In PSO, the velocity vid and position xid of the dth dimension of the ith particle are updated as follows:
 | (1) |
 | (2) |
 | (3) |
3. Relationships Governing Single Phase Induction Motor
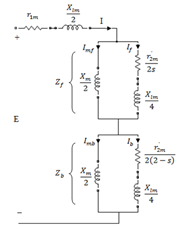 | Figure.1. equivalent circuit of SPIM based on double revolving field theory |
 | (4) |
 | (5) |
 | (6) |
 | (7) |
 | (8) |
 | (9) |
 | (10) |
 | (11) |
 | (12) |
 | (13) |
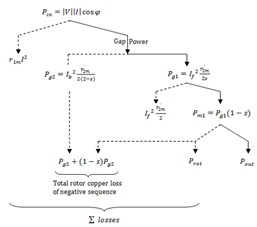 | Figure.2. power flow diagram for a SPIM |
 | (14) |
 | (15) |
 | (16) |
 | (17) |
 | (18) |
 | (19) |
 | (20) |
 | (21) |
4. Optimal SPIM Design
- The first optimization component is usually formulated is minimizing f(x) such that x exists within the n-dimensional feasible region D = {x│x≥0, gi(x)≤0, i=1,2,…,m}. f(x), gi(x) are real-valued scalar functions and vector x includes the n principal variables for which the optimization is to be performed. The function f(x) is called the “objective function”, for which the optimal values of x result in the minimum (maximum) of f(x), and these optimal values satisfy the given constraints. Inequality constraints gi(x)≤ 0 include the performance properties of the motor, dimensional restrictions and additional requirements[3]. The following variables (x1…x6) are considered as the principal or independent variables of optimization:x1: Stator bore diameter (m) x2: Stator stack length (m)x3: Number of turns in main windingx4: Number of turns in auxiliary windingx5: Wire diameter of main winding (mm)x6: Wire diameter of auxiliary winding (mm)The performance constraints imposed into induction motor design in this paper is as follows which are expressed in terms of variables:1. Power factor at rated load2. Locked rotor current to rated current ratio3. Starting torque to full load torque ratio4. Current density in the main winding5. Current density in the auxiliary windingThe motor efficiency η has been taken as objective function to be maximized.
5. Results and Discussions
|
6. Conclusions
- The application of particle swarm optimization (PSO) in parameters design of a split-phase single-phase induction motor is investigated in this paper. The induction motor design optimization is formulated as a nonlinear programming problem and the motor efficiency is considered as objective function. . It was observed that the efficiency of the induction motor was increased using PSO compared to the conventional design and full load slip in PSO was smaller than conventional design. The main advantages of the proposed technique are; its simple structure and its straightforward verification of maximum efficiency of induction motor for a given output power. The PSO offered better results compared with conventional design and it is more suitable to design optimization of single phase induction motor.
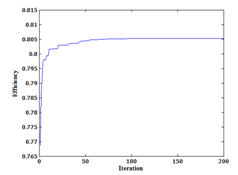 | Figure 3. Variation of efficiency against PSO iteration number |
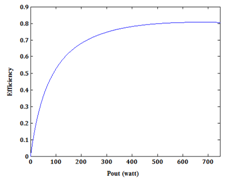 | Figure 4. Variation of designed motor efficiency against output power |
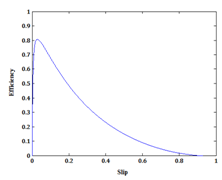 | Figure 5. Variation of motor efficiency against rotor slip |
Appendix
- Specifications of SPIM motor:Capacity 1 hpVoltage 115 VFrequency 50 HzNumber of poles 2Number of stator slots 24Number of rotor slots 30
References
| [1] | Mittle V.N., Mittal A.; “Design of electrical machines”, Fourth editions, Standard Publishers Distributors, 1996. |
| [2] | Fetih N.H., EI-Shewy H.M.; “Induction motor optimum design, including active power loss effect”, IEEE Transactions on Energy Conversion, 1986, Vol. 1, No. 3, pp. 155-160. |
| [3] | Huang H., Fuchs E.F., Zak Z.; “Optimization of single-phase induction motor design, I: Formulation of the optimization technique”, IEEE Transactions on Energy Conversion, 1988, Vol. 3, No. 2, pp. 349-356. |
| [4] | Huang H., Fuchs E.F., White J.C.; “Optimization of single-phase induction motor design, II: The maximum efficiency and minimum cost of an optimal design”, IEEE Transactions on Energy Conversion, 1988, Vol. 3, No. 2, pp. 357–366. |
| [5] | Mademlis C., Kioskeridis I., Theodoulidis T.; “Optimization of single-phase induction motors Part I: Maximum energy efficiency control”, IEEE Transactions on Energy Conversion, 2005, Vol. 20, No. 1, pp. 187–195. |
| [6] | Zahedi B., Vaez-Zadeh S.; “Efficiency optimization control of single-phase induction motor drives”, IEEE Transactions on Power Electronics, 2009, Vol. 24, No. 4, pp. 1062–1070. |
| [7] | Uler G.F., Mohammed O.A., and Chang-Seop Koh; “Design optimization of electrical machines using genetic algorithms”, IEEE Transactions on Magnetics, 1995, Vol. 31, No. 3, pp. 2008-2011. |
| [8] | Wieczorek J.P., Gol O., Michalewicz Z.; “An evolutionary algorithm for the optimal design of induction motors”, IEEE Transactions on Magnetics, 1998, Vol. 34, No. 6, pp. 3882 - 3887. |
| [9] | Bhuvaneswari R., Subramanian S.; “Optimization of single-phase induction motor design using radial basis function network”, IEEE Indicon Conference, Chennai, India, pp. 35–40, 11-13 Dec. 2005. |
| [10] | Bellarmine G.T., Bhuvaneswari R., Subramanian S.; “Radial basis function network based design optimization of induction motor”, Proceedings of the IEEE Southeast Conference, pp. 75-80, 2006. |
| [11] | Raj C.T., Srivastava S. P. Agarwal P.; “Realization on PSO based induction motor design via SPEED/PC-IMD”, International Conference on Advanced Computer Control(ICACC'09), pp. 65–69, 2009. |
| [12] | Wang Y., Li B., Weise T., Wang J., Yuan B., Tian Q.; “ Self-adaptive learning based particle swarm optimization”, Information Sciences, 2011, Vol.181, No.20, pp. 4515-4538. |
| [13] | Jiang Y., Hu T., Huang C., Wu X.; “An improved particle swarm optimization algorithm”, Applied Mathematics and Computation, 2007, Vol. 193, No.1, pp. 231–239. |