Ali Khazravi , Farid Karimipour
Department of Surveying and Geomatics Engineering, College of Engineering, University of Tehran, Tehran, Iran
Correspondence to: Farid Karimipour , Department of Surveying and Geomatics Engineering, College of Engineering, University of Tehran, Tehran, Iran.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
Abstract
Human activities are embedded in the space. They frequently use their spatial cognition in familiar space, or navigation aids (e.g., cartographic maps and satellite navigation systems) in unfamiliar areas for positioning and way-finding purposes. Today, satellite navigation systems are widely used by even non-expert users because of their abilities in friendly interaction with the user. They find the optimum path to a certain destination and navigate the user through it using automatically movement and rotation of the digital map regarding the user’s position as well as direction of movement. Dealing with cartographic maps, however, need prior knowledge and experience on map reading as well as enough spatial cognition. Users of cartographic maps must accomplish all of the way-finding, positioning and orientation tasks by themselves through connecting the elements of the environment and the map. Enhancing the cognitive readability of cartographic maps increases their usability for navigation more easily in unfamiliar environments. This paper represents the result of enriching cartographic maps with features used by pedestrians for navigation in urban areas.
Keywords:
Spatial Cognition, Cartographic Maps, Cognitive Map, Landmarks, Map Reading, Urban Navigation, Pedestrian Navigation
1. Introduction
Human activities are embedded in the space. They frequently use their spatial cognition in familiar space, or navigation aids (e.g., cartographic maps and satellite navigation systems) in unfamiliar areas for positioning (where am I?) and way-finding (how can I reach to my destination?) purposes. This so-called way-finding is a directed process to move from a source to a given destination through intermediate path(s)[1]. People may use their spatial cognition in familiar space, or navigation aids (e.g., cartographic maps and satellite navigation systems) in unfamiliar areas for positioning and way-finding purposes. Today, satellite navigation systems are widely used by even non-expert users because of their abilities in friendly interaction with the user. They find the optimum path to a certain destination and navigate the user through it using automatically movement and rotation of the digital map regarding the user’s position as well as direction of his/her movement. Dealing with cartographic maps, however, need prior knowledge and experience on map reading as well as enough spatial cognition. Users of cartographic maps must accomplish all of the way-finding, positioning and orientation tasks by themselves through connecting the elements of the environment and their corresponding on the map.Cartographic maps are limited to a top-view representation of the space; thus only provide metric information and some topological relations; but they do not contain any spatial categorical knowledge (e.g., landmarks), which is the basis of human spatial cognition.Cartographic maps are available in different types for different usage. Urban map is a type of cartographic map which demonstrates the whole or part of an urban area in a smaller scale. Most of these maps represent a 2D top view model of reality. Limitations of top-view-only mapping make it difficult to understand the map; as a result the understandable information from these maps is limited to names and relations between features. Consider two scenarios of navigation in an urban area: In the first scenario, the navigator is familiar with the area and know most of the features of the environment and their interrelationships. In this case the navigator start its way from the given point, orientation is done by recognizing the features in the environment; then, navigator decides on choosing the way through the destination. During this process, navigator does not need looking for the name of the streets or squares, because the process of orientation is done faster and easier using the environment features compare to the street names. Thus, it is possible to navigate in a familiar environment without knowing the name of the streets. In the second scenario, consider a navigator who is not familiar with the environment and his only spatial knowledge is a cartographic map. The navigator does the way-finding, i.e., positioning and orientation, by matching the name and relations of the features extracted from the cartographic map with their corresponding in the environment. Human has a strong natural navigational aid, known as spatial cognition. It could be used to make a better understanding of the elements of the environment, which consequently makes it easier to navigate in an unfamiliar urban environment[2].Spatial cognition has been extensively studied in psychological and geographical research. Kevin lynch investigated the spatial cognition and its relation with urban design[3]. He studied behaviour of people in way-finding and environment recognition in three cities with different textures. The elements of cognitive maps introduced in his book are the main elements for enrichment of cartographic map proposed in this paper.A recent research in the field of pedestrian navigation was done by Giasbauer and Frank[2], who modelled a pedestrian navigation system for urban areas. Spatial cognition in psychology has been investigated in several research including[1, 4-7]. There have been some studies on how the landmark, as an important element in spatial cognition, can improve the way-finding task [1, 8, 10]. However, they all focus on the landmark and do not consider other elements of spatial cognition.This paper suggests enriching cartographic maps with the elements of spatial cognition to improve their value for navigation in unfamiliar environments. Especially, it concentrates on the elements of spatial cognition used by pedestrians for navigation in urban areas. Section 2 reviews spatial cognition and spatial knowledge in more details. In Section 3, the elements of cognitive map are introduced from the geographic point of view. To elucidate the effects of proposed map, Section 4 is dedicated to map reading concepts and its tasks. Section 5 contains the results of enriching a cartographic map with the elements of spatial cognition introduced in Sections 2 and 3. Finally, Section 6 concludes the paper and represents ideas for future work.
2. Spatial Cognition
Spatial cognition is acquiring, organizing, updating and usage of spatial knowledge about the environment[8]. A cognitive system may consist of sensing and imagery, learning, reasoning, decision making, and problem solving sub-systems[9].
2.1. Cognitive Map
A cognitive map is a mental model of an environment. It may contain spatial elements (e.g., path, landmark, direction and distance) and sensual attributes (e.g., odor, sounds, images and sensations). Cognitive maps do not have an integrated structure, but virtually they consist of five distinct spatial elements: paths, edges, districts, nodes and landmarks[3].
2.2. Types of Spatial Knowledge
Spatial knowledge is divided into metric and categorical knowledge. Metric parameters are quantitative and comparable. While, categorical parameters are qualitative terms (e.g., left, right, near, far, etc.). Categorical parameters are better understood by people. In some cases, however, they could be ambiguous. In terms of types of the elements and comprehensiveness, spatial knowledge is divided into landmark knowledge, route knowledge, and survey knowledge.
2.2.1. Landmark Knowledge
As the first step of understanding the environment, people pay attention to specific objects or features, called landmarks (Figure 1), which is an egocentric knowledge [1].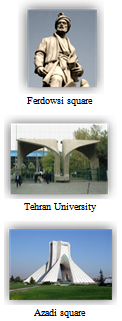 | Figure 1. Landmark knowledge: distinct landmarks |
2.2.2. Route Knowledge
Route knowledge is a sequence of familiar or known paths, junctions, and landmarks. This kind of spatial knowledge is obtained gradually, and makes a sequential structure by its elements (Figure 2). This knowledge is used to move in routes and paths based on a sequence of landmarks, features, junctions, and nodes. Route knowledge is based on egocentric view[1]. | Figure 2. Route knowledge: sequence of features |
2.2.3. Survey Knowledge
Survey (also called configurational) knowledge is more comprehensive comparing to the landmark and route knowledge. It is built up by integrating all the landmarks, routes, and paths as well as the relations among these elements into a unified complex network. Survey knowledge could be thought of as a bird view that flies over a city and see everything and their relations at once (Figure 3).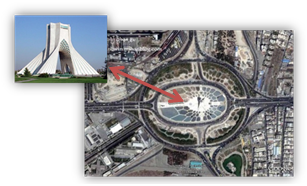 | Figure 3. Survey knowledge |
3. Elements of Cognitive Map
Lynch defines five spatial elements for a cognitive map: paths, edges, districts, nodes and landmarks[3].
3.1. Path
A path is a linear channel through which the navigators move. Streets, sidewalks, railways, and channels are examples of paths (Figure 4). For many people, paths are the main elements of their cognitive map, along which other spatial elements are organized[3]. Slope is an attribute of a path that can be easily reminded and recognized by people, but is neglected in current cartographic maps. | Figure 4. Different paths for different navigators: Buses (left);cars,(middle) and pedestrians (right) |
3.2. Edge
Edges are linear features that are not considered as a path. They could discriminate two areas through their connecting line. A wall is an example of an edge[3]. Hard edges are continuous visible features that are passable or impassable. The difference between paths and edges depends on the navigator, i.e., an object considered a path for a navigator could be an edge for others. For instance, a road is a path for a car, railway is a path for a train, and both are hard edges for a pedestrian. The same applies to passable or impassable edges. For example, Figure 5.a shows an impassable hard edge for a car, while it is passable for a pedestrian. | Figure 5. Examples of edges: (a) An impassable hard edge for a car, but passable for a pedestrian; (b) An impassable hard edge for both cars and pedestrians |
3.3. District
Districts are medium to large scale 2D areas of a city. A navigator enters mentally into a district. Each district is recognized and identified by some features[3], including the building structure, air quality, traffic, inhabitants’appearance, topography, vegetation cover, etc. Districts may have a hard core (visible object), and features around which are homogeneous.
3.4. Node
Nodes are strategic and reference points in the city into which a navigator mentally enters. A node can be a junction, the start or end of a path, the intersection of two paths, or the centric points or the core of a district. Lynch considers nodes as decision points[3]. The number of relations to a node is a key factor to assign an importance value to a node: The more relations to a node, the more importance value is assigned to it. Furthermore, prominence of a node for navigator depends on selected paths and destination of the navigator.
3.5. Landmark
Landmarks are special type of reference points that navigators do not enter into it, but view it in their path (e.g., buildings, mountains, etc.). Different disciplines represent different definitions of landmarks, but they all agree on visibility, contrast and usability for navigation. Landmarks may be used for:• Selecting a path based on familiar landmarks• Selecting a path by excluding unfamiliar landmarks• Approving or denying a selected path• Orientation
3.5.1. Global Vs. Local Landmarks
Regarding the scale and distance to the viewer, landmarks are divided into local and global[10]. Local landmarks are only visible from near distances and are used for choosing a proper path. These landmarks are relatively small and conspicuous. Examples are signs and buildings. Global Landmarks are visible from far distances and are used to create an allocentric reference system. A global landmark can determine a cardinal direction for the reference system. The sun, mountains, and sky scraper are instances of global landmarks. Global landmarks can be useful on nodes where the navigator has to choose a path considering the direction to a global landmark.Landmarks could have two types of features; objective and subjective features.Objective features are unequivocal features, which do not need any interpretation. They are physical attributes of a landmark and people with different individual perception have the same understanding of them. Objective features are so critical for a landmark that an object with no objective features cannot be considered as a landmark[1].One of the most important objective features is contrast (Figure 6). It is the key to recognize and to identify a landmark. Objects with high contrast in the environment are naturally considered as a landmark[1]. Such contrast could be visual (e.g., a red house in a block where other buildings are white), or defined based on other senses (e.g., odor, sounds, etc.). | Figure 6. Examples of contrast in the environment |
| Table 1. Objective and subjective features of landmarks[1] |
| | Objective features | Subjective features | | Contrast | Point of reference | | Creation | Usage | | Visibility | Remembrance | | Location | Legend | | Stationary | Distinguishability |
|
|
Subjective features rely on individual knowledge or memory[1]. Subjective feature are less equivocal, namely they mostly depend on the individual perception, which is different from a person to another. Table 1 illustrates the characteristics of objective and subjective features of landmarks.
4. Map Reading
Map, as a representation of the real world, is more than only the composition of some abstractive symbols. As a formal language, it includes its rules and knowledge and behaves as a communicator of knowledge among people. Map is a concrete abstraction of relationships of spatial features along their attributes, which are embodied in the map by using the map language[11]. Maps represent spatial knowledge from an environment in survey level[12].Map reading is recognizing and understanding symbols and finding their relations with the real world features. In other words, it is the ability of judging about 3D real space position based on information extracted from a (basically 2D) small scale representation of the corresponding space. This ability is based on two main cognitive processes: (1) recognizing the discrimination of symbols and the reality; and (2) finding their relation[13].Lobben[14] has designed a test to measure the map reading ability of different class of people based on certain parameters. These abilities or tasks are considered as main tasks in map reading, which are listed as follow:• Map rotation• Place recognition• Self-location• Route memory• Way findingThese tasks are the key elements of differentiation of people in map reading ability, which are achieved by different people using different strategies[15]. On top of this, symbol recognition is another task that every map reader can do it in an acceptable level.Map rotationDuring the navigation in map reading, navigators usually need to rotate the maps, which could be done physically or as a mental process, known as mental rotation[14]. | Figure 7. An example of visualization |
Place recognitionPlace recognition is recognizing the real world places from their corresponding on the map. It is based on a mental ability, known as visualization (Figure 7)[14], which is a continuous process done by map readers during the navigation[15]. From a map reading perspective, visualization is an ability to imagine real environment based on a 2D or 3D view captured from a map. Self-locationSelf-location is the inverse of place recognition. Here, the map reader specifies the real world features through their corresponding elements on the map (Figure 8)[15]. These features are usually not represented on the map, while they could have been used to orient more easily.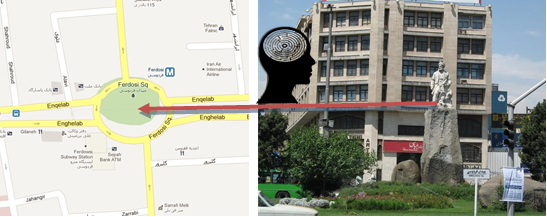 | Figure 8. An example of self-location |
Route memoryRout memory is simply remembering the map features, streets, square, etc.[14].Way-finding Way finding is considered as an ability to decide on choosing proper route, based on spatial knowledge. It is done in map reading along two processes: (1) after memorizing the map for navigation; and (2) when the navigator decides to move back the way to the start point[14].
5. Implementation
This section represents the result of enriching a cartographic map with the elements of spatial cognition to improve its value for pedestrian navigation purpose. For landmarks, we only concentrate on objective features discussed in Section 3.The study area is a cartographic map of the Sohrevardi area located in the North of Tehran. The transportation network of the area was extracted from a digital map. Then, the following elements of spatial cognition were selected to be added to the map:• The study area will be highlighted as a district.• The nodes of the area will be added to the map.• The local and global landmarks that could be used for navigation in the area will be added to the map.• All the streets and highways will be considered as edges for pedestrians.• Sidewalks will be added to the map as paths for pedestrians.• The crosswalks, where pedestrians can cross the streets, will be added to the map.The data needed for the above mentioned enrichment were collected on field. As it was mentioned, we concentrated on objective and unequivocal features of the landmarks, which need a little description. The collected data are as follow:• Objective features of local landmarks, along some unequivocal description about their appearance• Slope of the paths• Crosswalks and other paths where a pedestrian can cross an edge• Identifying junctions, which have heavy usage, as nodes• Identifying features that are repeated along a districtIn the enrichment process, landmarks were identified and highlighted on the map by a symbol. This information is used for a categorical addressing or address matching systems. In order to assign descriptive (textual) information about the objective features of the landmarks, a distinct number were added to the symbols used for each landmark, and the related descriptions were provided on the side of the map.To help the user to find the cardinal direction, a global landmark was used. In case of Tehran, the mountain chain located at the top north of the city was used.Finally, the street slopes were classified into low, medium, and high, which were illustrated by different symbols and colors (Figure 9). Furthermore, a symbol was used to represent abrupt changes in slope of a path. Then, each path on the map was equipped with such slope symbols. 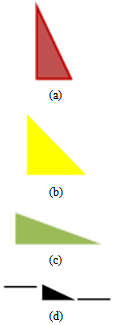 | Figure 9. Classification of street slope: (a) high, (b) medium, (c) low, (d) abrupt change in slope |
The final cartographic map enriched with these unequivocal elements of spatial cognition is illustrated in Figure 10.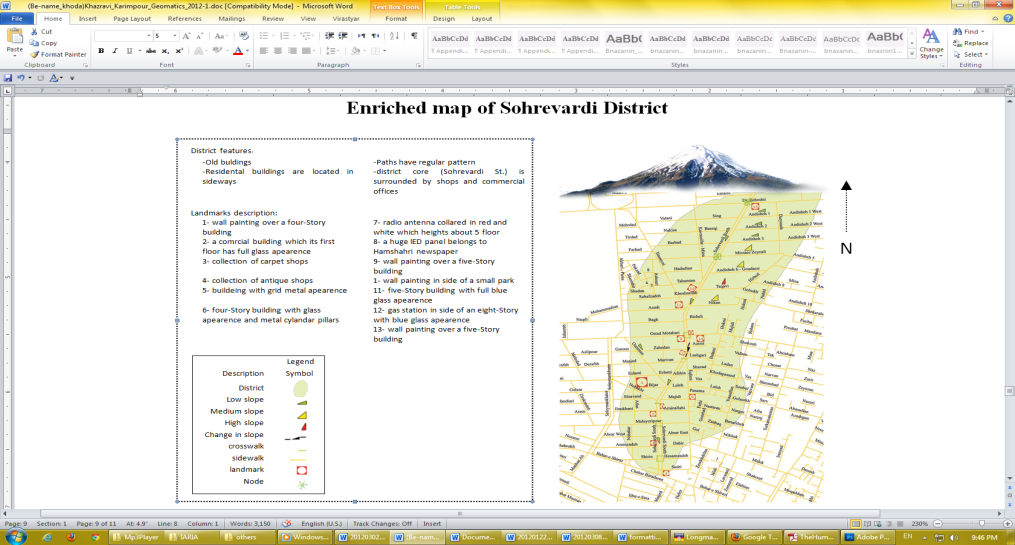 | Figure 10. The final enriched cartographic map with the elements of spatial cognition |
6. Conclusions
Cartographic maps are one of the most important navigational aids. They are mostly a top view representation of the space, which provide metric information and topological relations. However, maps do not contain any spatial categorical knowledge (e.g., attributes of landmarks), which is the basis of human spatial cognition. In this paper, it is suggested that a cartographic map could be enriched with the elements of spatial cognition to improve their value for navigation in unfamiliar environments. The highlights of the proposed enrichment are:• More accurate and easier self-location• More accurate and easier visualization• Constructing faster and more accurate mental map• More information for way-finding and route selection• Better learning the important features of an area• A fixed global landmark (mountains) may help to have easier mental rotation and easier orientationThe result of this study is a cartographic map that is enriched with the unequivocal elements of spatial cognition. Deploying this map will increase the performance of navigation in unfamiliar places. However, the output was presented on a paper map, which results in limitations and complexities on implementation. It may cause some panic and disturbance for map users. The same process could be applied on digital maps, which are dynamic. This kind of map will enables to provide the user with more attributes through filtering the presented information, changing the map scale and usage of other media (e.g., voice). Such map will support a spatial information system for navigation purposes.Adding visibility constraints to landmarks is considered as a future work. It helps the user to know where to expect a landmark to be seen. This feature will result in better visualization and less anxiety. Furthermore, by investigating other districts, it is possible to compare the results and find more specific features to be added to the map. Finally, we are working on an automatic cognitive map enrichment system, which uses cadastral and land-use data as input data to produce cognitive friendly information.An ongoing research for verification and versatility assessment of the proposed enriched maps is in progress, which assesses the usability of the enriched map for navigation purpose using an agent base model.
References
| [1] | E. Platzer, Spatial Cognition research, “The human navigation process and its comparability in complex real and virtual environments”, PhD. Dissertation, University of Munich, 2005. |
| [2] | C. Gaisbauer and A.U. Frank, “Wayfinding model for pedestrian navigation”, The 11th AGILE International Conference on Geographic Information Science, University of Girona, Spain, pp. 21-29, 2008. |
| [3] | K. Lynch, “The Image of the City”, p194, MIT Press, 1960. |
| [4] | C. Presson and D. Montello, “Points of reference in spatial cognition: Stalking the elusive landmark”, British Journal of Developmental psychology, 6(4), pp. 378-381, 1988. |
| [5] | T. Herrmann and K. Schweizer, “Sprechen über Raum: sprachliches Lokalisieren und seine kognitiven Grundlagen”, Huber, 1998. |
| [6] | H. Stumpf and J. Eliot, “Gender-related differences in spatial ability and the k factor of general spatial ability in a population of academically talented students”, Personality and Individual Differences, Vol. 19, Issue 1, pp. 33-45, 1995. |
| [7] | J. Xia, D. Packer and C. Dong, “Individual differences and tourist wayfinding behaviours”, Proceedings of 18th World IMACS Congress and MODSIM09 International Congress on Modelling and Simulation, Cairns, Australia, pp. 1272-1278, 2009. |
| [8] | S. Werner , B. Krieg-Brückner , H.A. Mallot , K. Schweizer and C. Freksa, “Spatial cognition: The role of landmark, route, and survey knowledge in human and robot navigation”, Informatik", 97, pp. 41-50, 1997. |
| [9] | N.J. Smelser, J. Wright and P.B. Baltes [ed.], “International encyclopedia of social & behavioral sciences”, Elsevier, 2001. |
| [10] | S.D. Steck and H.A. Mallot, “The role of global and local Landmarks in virtual environment navigation”, Journal of Teleoperators and Virtual Environments archive, Vol. 9, Issue 1, pp. 69-83, 2000. |
| [11] | E.S. Nelson, “A cognitive map experiment: mental representations and the encoding process”, Cartography and Geographic Information Science, 23(4), p. 229-247, 1996. |
| [12] | A. MacFadden, L. Elias, and D. Saucier, “Males and females scan maps similarly, but give directions differently”, Brain and Cognition, 53(2), pp. 297-300, 2003. |
| [13] | N. Bluestein and L. Acredolo, “Developmental changes in map-reading skills”, Child development, 50(3), pp. 691-697, 1979. |
| [14] | A.K. Lobben, “Navigational map reading: predicting performance and identifying relative influence of map-related abilities”, Annals of the Association of American Geographers, pp. 64-85. 2007. |
| [15] | A. K. Lobben, “Tasks, strategies, and cognitive processes associated with navigational map reading: a review perspective”, The Professional Geographer, 56(2): pp. 270-281, 2004. |
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-Text HTML
Full-Text HTML