-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
International Journal of Applied Psychology
p-ISSN: 2168-5010 e-ISSN: 2168-5029
2017; 7(4): 79-85
doi:10.5923/j.ijap.20170704.01

A Tool to Facilitate Learning in a Complex Manual Control Task
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLBernd Johannes1, Sergey Bronnikov2, Yuri Bubeev3, Alexander Dudukin3, Hans-Juergen Hoermann1, Timo Frett1, Joern Rittweger1, Anthony Gaillard4
1Institute of Aerospace Medicine, German Aerospace Center (DLR), Cologne, Germany
2S.P. Korolev Rocket and Space Corporation “Energia”, Moscow, Russia
3Institute of Biomedical Problems (IBMP), Moscow, Russia
4Tilburg University in the Netherlands, Netherlands
Correspondence to: Bernd Johannes, Institute of Aerospace Medicine, German Aerospace Center (DLR), Cologne, Germany.
| Email: |  |
Copyright © 2017 Scientific & Academic Publishing. All Rights Reserved.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

A tool has been developed to investigate and to facilitate learning processes in complex perceptual-motor tasks. The tool is based on the “docking” maneuver, a demanding manual control task, in which a target object has to be positioned by manipulating six degrees of freedom. The task difficulty can be varied from easy to very demanding. On the basis of the performance the difficulty may be adapted and feedback may be given to the trainee. The tool can be used either in an automatic rule-based mode or as a training aid for instructors. For monitoring the learning process not only performance data are collected, but also subjective ratings and psychophysiological measures. Cardiovascular measures, verbal callouts, voice frequencies, and Event Related Potentials (ERPs) were collected as indicators of arousal, situation awareness, perceived situation control, and mental load, respectively. This multi-level approach yields more insight into the problems, the effort and strain of the trainee. The tool was successfully tested during the Mars500 project in which a long-term space flight (Moscow, IBMP) was simulated. The feasibility of a flight-embedded P300 assessment as a correlate of free cognitive capacity was successfully investigated in laboratory experiments. The tool provides new possibilities for research, not only on docking training, but also on manual control learning in general (e.g. controlling a robot arm).
Keywords: Perceptual-motor performance, Psychophysiological measures, Intelligent tutor, Simulation-based skill acquisition
Cite this paper: Bernd Johannes, Sergey Bronnikov, Yuri Bubeev, Alexander Dudukin, Hans-Juergen Hoermann, Timo Frett, Joern Rittweger, Anthony Gaillard, A Tool to Facilitate Learning in a Complex Manual Control Task, International Journal of Applied Psychology, Vol. 7 No. 4, 2017, pp. 79-85. doi: 10.5923/j.ijap.20170704.01.
Article Outline
1. Introduction
- This paper presents an training tool (labeled “6df”) to learn, refresh, and practice the manual control of objects with six degrees of freedom (DoF). The dominant part of publications about docking is about automated docking of spacecrafts [1-4]. However, the ability to control the docking manually has become an important feature for manned space flight. The present tool has been developed to investigate and support the acquisition and maintenance of manual docking skills of spacecraft during long-term missions in space [5]. It focusses on the learning of cognitive, perceptual and motor skills in the manual control of objects with six DoF, providing a performance metric for humans in a human-robot interaction [6]. The manual control of six DoF is characterized by a very low level of automation (LOA), [7]. Any similarity to a certain real object or maneuver is avoided by an abstract task type. Other task skills (e.g. controlling a robot arm) depict similarities may thus benefit from a basic six DoF training. Also operators on earth can be confronted with six DoF, for example when remotely controlling a robot arm or an unmanned aerial vehicle.The tool provides insight into the individual learning process, which may be used to improve the training methods. To accomplish this we adopted a multi-level approach which gives insight into the cognitive, emotional and physiological processes to perform the taskThe tool has the following features:• Large variety of conditions varying in difficulty and complexity (LOA) of the task;• Immediate feedback based on the performance of the trainee;• The difficulty of the task can be adapted to the performance of the trainee;• Educational lessons allow self-sufficient learning (intelligent tutor);• Subjective, voice, and physiological measures (ECG, EEG) are collected;• Secondary tasks are implemented;• Data are integrated into scores of performance, arousal, mental load, and situation awareness.In the following two sections the background of learning in complex manual control skills will be given and the features of the 6df tool are described. To illustrate its applicability the results of two tests are presented, an autonomous training program and the use of event related potentials as indicators of mental load.
2. Learning Perceptual-Motor Skills in Complex Manual Control Tasks
- It has been shown that the manual control in the “docking” maneuver is extremely challenging [8]. The six DoF in this task consist of moving an object in three dimensions in space (3 DoF of ”translation”) and to rotate it around these dimensions (3 DoF of ”orientation”). A major challenge of the task is to build a three-dimensional image based on a two-dimensional screen. Both the direction of the flown object and its orientation in space have to be monitored continuously, while the target object always has to remain within sight of the camera monitor. This often requires a sideward flying trajectory, which is rather demanding. When changing the flight path the operator has to take into account the actual orientation of the flown object. This is extremely difficult because we are used to control along a horizontal plane (right-left) and we are unfamiliar with the free movement along the vertical (up-down) axis or simultaneous movements around rotatory axes. In addition, dizziness and motion sickness may be evoked by the perception of these movements.The usual way to control six DoF is by having two hand controllers: the left hand for translation and the right hand for orientation. The control of objects under space conditions is so difficult because left and right hands have to be controlled independently, whereas the way of controlling differs enormously.Based on the principles for the development of training programs for high-performance skills [9, 10], we developed a concept which favors part-task instead of whole-task training for complex skills especially for inexperienced trainees.
2.1. Skill Degradation
- In space flight, the deterioration of performance skills plays an important role that should be given more attention [11, 12]. Salnitski [13] found serious deterioration of the performance in the manual docking of a spacecraft under weightlessness without continuous practice since more than three months.
2.2. Stress
- In the event that astronauts have to perform their first docking maneuver in space, they are lacking any practical experience. Therefore they have to rely solely on their simulator training. Obviously such a maneuver involves a considerable amount of risk, which causes emotional strain of the operator. Emotional strain continuously occupies attentional resources. This reduces the processing capacity of the operator, resulting in a loss of concentration and an increased risk of errors. Therefore, it is important to monitor the operator’s actual arousal level during the training. Required performance in a six DoF operation should be maintained at an acceptable level of physiological effort, without symptoms of stress reactions. The simultaneous assessment of performance, subjective feelings and arousal provides an optimal picture to monitor and analyze the learning process.For the development of the training program we focused on the following skill components:- Situation awareness: The trainee has to realize continuously the actual situation in terms of position and orientation. This is impeded by the 2d-visualization of the 3d-world.- Anticipation: The trainee has to learn how to anticipate the optimal move path towards the target point.- Comprehension: The trainee has to build up an adequate mental representation of the relevant parameters speed and distance to the target object from an inside-looking-out view of the moving object on the 2d-screen. - Control: The control of the object with six DoF along the anticipated path with the adequate speed has to acquire proficiency up to a more or less “automated” skill level. This requires a large amount of practice and pattern drill.
3. Description of the Tool
- The development of the tool has the following objectives:• Developing a self-sufficient educational system;• Giving insight into the individual learning process;• Optimizing training methods to reach sufficient proficiency;• Developing individualized training programs;• Diagnosing degradation in 6df-control skills (e.g. after long periods of non-training);• Enhancing training efficiency in terms of duration and costs.Initial training with the 6df tool during the first stage of space crew training is expected to reduce the number of training hours on the realistic vehicle simulators with limited capacity for all trainees. It could also be used as a device for refresher training in the absence of other high fidelity simulators, for example during a mission.
3.1. The Task
- The task simulates the manual control of a virtual spherical object in space, which requires the simultaneous processing of six DoF. In the first training sessions the object has to be navigated along a given pathway, indicated by a series of ellipsoid rings (fig. 1). The ellipsoids are semi-transparent to allow the permanent view on the target-object. The path of ellipsoids has to be traversed while looking from inside the moving object out through the camera monitor with a visual adjustment grid (visor). The arrangement of the ellipsoid rings requires rotating around the moved object’s axes. The visualized pathway provides guidance to the controlled object from its current position to the target and prevents the trainee from deviating to far outside the approach corridor. At a certain level of education the ellipsoids are omitted. The level of complexity of the tasks is adjustable from a very easy level for novices to an open range in difficulty and complexity, if it is of interest for research in learning. In the present application the functionalities of controllers and flight dynamics reflect the characteristics of the regular Soyuz spacecraft.
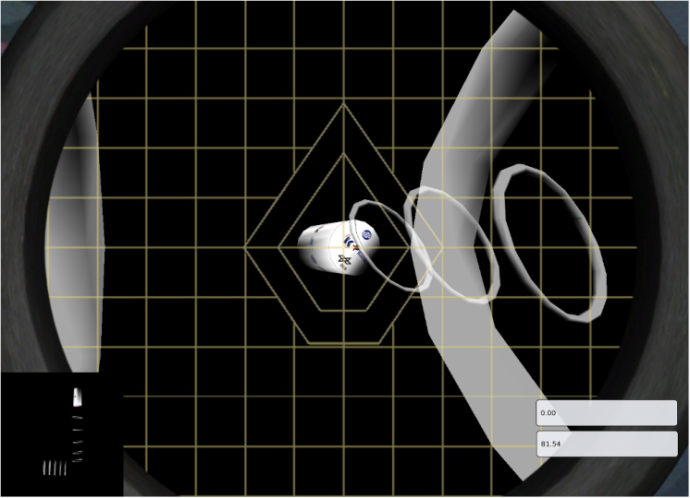 | Figure 1. Screenshot of the 6df- task. The operator looks through a visor grid towards the target object. The chain of successive semi-transparent ellipsoid rings displays the optimum path towards the target object |
3.2. Feedback
- Feedback is one of the most important aspects of the learning process. Performance and effort data are presented for purposes of feedback immediately after finishing a task as a green-yellow-red coded table. The trainee can easily recognize the weak aspects of his performance. Additional information on the performed track can be given by an instructor, with graphs from different perspectives or planes. Feedback can also be given by replaying the tracking performance.
3.3. Training Program
- The training starts with a familiarization phase with the different functionalities of the two hand controls for translation and orientation. Basic elements of the control were practiced separately: moving along the object axes, oblique to the moved object axes, curves, final approach, and contact (capture, docking). The degrees of freedom that have to be controlled are increased systematically. Whether a trainee progresses to the next level is based on the performance of the trainee. If the performance is not sufficient he can either receive the same task or a different one at the same difficulty level. When errors occur a replay can be shown or basic video lessons can be presented together with specific tasks.The education process is supported by an illustrated text script and video lessons. They provide a general overview and explain the six DoF and their relation to the hand controls, and basic aspects of maneuvering an object in space (e.g. how to fly a curve). For the single tasks html-sites include short text instructions, pictures showing the initial position, relevant action moments during the task, and the final position. The texts and audio files are prepared in different languages (English, French, German and Russian). The instruction text consists of a description of the task, how to control it and a general lesson learned.
3.4. Secondary Task
- For the analysis of event related potentials (ERP) secondary tasks have been developed for both the visual and the auditory modality. In the visual modality manometer gauges have to be checked and in the acoustic modality particular sounds have to be detected. In both cases the relevant signals have to be counted. The occurrence probability of relevant signals and the interstimulus intervals can be varied in several ways. The secondary task provides also acoustic feedback comments on the performance in the secondary task. Voice inputs or key pressing can be used by the trainee to enter the required response.
3.5. Measures
- A central feature of the tool is the linkage of performance measures, subjective evaluations, cardiovascular measures [14, 15], voice frequency parameters [16] and estimates of cognitive difficulty using ERPs [17]. The voice commands to execute the secondary tasks are used for voice analysis [16], which provides correlates of the feelings of the trainee (e.g. sense of control). The performance assessment is based on the well-established method of the Russian docking training system [18]. The methodology is in detail described in [19]. In addition a control input analysis was developed similar to methods described [20]. The subjective evaluation of the perceived difficulty of a task is assessed on a visual analogue scale. The perceived arousal is assessed on a 9-point Likert scale.
3.6. Equipment
- The hand controller and the psychophysiological measurement system (HealthLab) were developed by Koralewski Industrie Elektronik oHG (Hambühren, Germany). Environmental parameters (air pressure, air temperature, humidity), cardiovascular-autonomic parameter (ECG, skin conductance, finger pulse wave, finger skin temperature), parameters of brain activity (EEG / ERP), and voice parameters (frequencies, jitter, shimmer) can be registered. The software was developed by SpaceBit GmbH (Eberswalde, Germany).In the secondary task the sounds are generated by the soundcard of the computer or by the EEG module of the HealthLab system. The EEG-module provides acoustically defined stimuli. The secondary task can be controlled either by mouse/key pressing or using word commands. The word recognition system allows also for storage of verbal callouts e.g. for assessing situation awareness [21, 22].
4. Feasibility Testing
4.1. The Mars-500 Project
- During the Mars500 project [23, 24] a prototype of the 6df-tool, was tested to examine the usability of the docking learning program and the technical equipment during long-term confinement and isolation. The Mars500-project was executed in the terrestrial complex of the IBMP in Moscow (2009-2011) to simulate a time-realistic flight to Mars and back. The experiment “6df” was ethically approved by the local committee in Hamburg, Germany. For further details about the Mars500-project refer to documents of IBMP [23] and ESA [24]. This research complied with the American Psychological Association Code of Ethics.
4.1.1. Methods
- Participants: Twelve young healthy men (7 Russians, 4 Europeans, 1 Chinese), who participated in the Mars500 project, were untrained in manual spacecraft docking maneuvers, There were two groups of six participants each. The participants in the first group (6df-group) received the 6df-training. Prior to the study, they were instructed how to handle the software and hardware of the training tool. A second group, which served as the reference group (Instructor-group), received intense face-to-face (Russian standard) docking training by an instructor prior to the isolation phase of the study. The Russian standard docking training uses a photo-realistic simulation of the ISS and the Soyuz space craft and is described in detail in [19]. All participants signed an informed consent prior the inclusion into the study. This research complied with the tenets of the Declaration of Helsinki and was approved by the Medical council of North-Rhein-Westphalia.Hypothesis: At least one participant of the 6df group will be able to dock as well as the instructor trained group, tested with the regular docking training system.Protocol: The 12 subjects were assigned to two studies: six subjects were isolated for 105 days and the other six for 520 days (three subjects of the 6df-group and three subjects of the Instructor-group in each study); sessions were performed every 2 to 3 weeks throughout the studies. For the 6df-group each session consisted of six 6df-tasks. The sessions of the Instructor-group consisted of 5 tasks using the regular Russian docking training system. In the 105-day study, subjects switched to the Russian standard docking training after 9 to 10 sessions of 6df (two weeks prior to the end of the isolation phase). During the 520-day-study, subjects switched the program after 6-7 sessions (during the fourth month). After finishing the 6df training course participant’s performance on the Russian standard trainer for spacecraft docking was used as a measure of individual training success. Due to the low statistical power no generalizing statistical analyses will be presented here. For both studies the last session in chamber and the first post-isolation session were used for a casuistic analysis, which is sufficient for the demonstration of the tools’ possibilities.
4.1.2. Results
- Figure 2 illustrates the mean performance of the participants of the Mars-500 project, trained by an instructor (black bullets with error bars) and the single performance of one participant trained only by the 6df tool (open circles without error bars). In both studies the most successful crewmember of the 6df-group was not worse than the members of the instructor trained group.
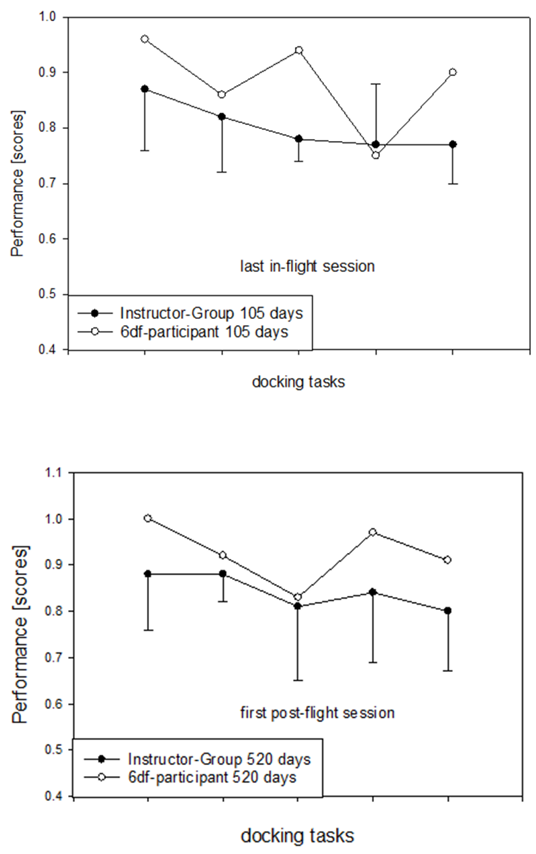 | Figure 2. Comparison of the performance of one 6df-group member (open circles) with the average of the Instructor-group (filled circles) during a Mars-flight simulation study of 105 (upper) and 520 days |
4.2. P300 as an Indicator of Cognitive Difficulty during 6df Training
- Laboratory experiments were executed to examine the efficiency and robustness of the ERP-configuration to providing a stable P300 evoked by the secondary task during the 6df task. To use ERPs in practical situations (as during space flight) a design was chosen in which it has been shown that a robust P300 can be obtained [25]. The P300 is a very intriguing ERP-component to be investigated. Other interesting components are the N200 and the Mismatch Negativity [26], but not considered herein. Here we only want to illustrate the possibility to use these components acquiring more information to assess the behavior and performance in the 6df task. It was expected that increasing the main task’s difficulty would cause worsening of the secondary task’s performance, and that the amplitude of the P300 would become smaller and would occur later. Learning effects in the main task were then expected to let the P300 amplitude increase and to assume shorter latency, because more attention can be paid to the secondary task.The ethical approval for this ground based reference study was agreed by the local review board in Nord-Rhein-Westfalen. The first author acted as participant. We regard this acceptable, since the goal of this study was to identify effect sizes for future sample size calculations, rather than inferring statistical analyses. The test session consisted of 6 standard tasks (condition “easy”) and one more difficult task (condition “difficult”). In the difficult task the station was rotating. For data analysis R [27] was used. The analysis of variance were done with the R procedure “lm” of the R-package “nlme” to demonstrate the possibility of immediate statistical analysis of single training sessions. The package “ggplot2” was used for the graphical visualization. For the intra-individual comparison of the ERP-parameter magnitude and latency a p-level of p < 0.5 was accepted as the threshold for significance.
4.2.1. Results
- The differences illustrated in figure 3 could be verified for this single case also statistically. The effect of difficulty, decreasing the P300 amplitude, was significant (df: 1/7307, F= 171.7, p < 0.001). Amplitude changes over time were also significant (df: num 125, denum: 7307, F= 485, p < 0.001).
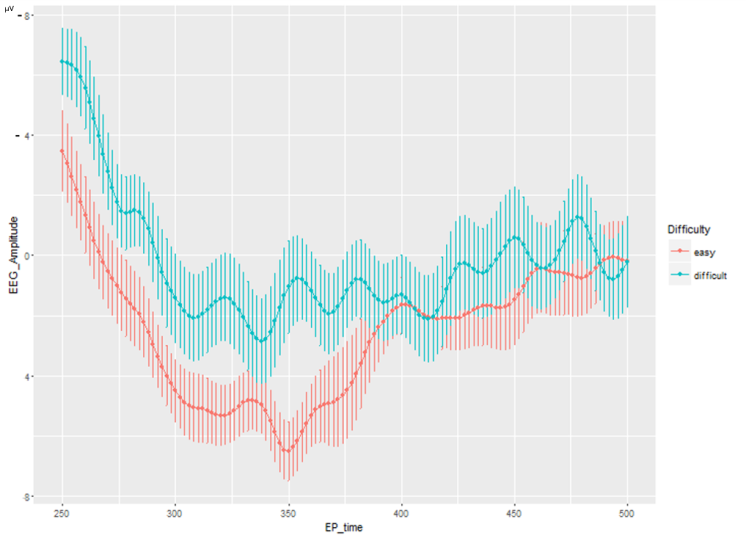 | Figure 3. The ERP in micro Volts, 250 – 500 msec after the relevant stimulus with the standard error of the mean allowing for intra-individual statistical comparison between tasks differing in difficulty |
5. Relevance and Applicability
- Since the docking of a spacecraft on a space station is one of the most challenging operations in space, it may determine the success of an entire space mission. This maneuver has to be performed when automated docking is not possible. Although the 6df tool is developed to investigate docking skills of space flyers, it is not meant to substitute the regular docking training devices (mock-ups of real space equipment). However, it can naturally be used to gather more insight into the learning processes involved in manually controlling a complex task. The results obtained may be used to improve the learning program of the regular training.The present tool may also be used as a training support for other complex tasks in space. Similar manual control skills are required for the steering of extra vehicular activities (Manned Maneuvering Unit) as demonstrated by NASA 1984 and for steering a robot arm mounted to the space station or space craft grapping a free flying object (CANDARM2). Similar skills are also required in tasks on earth. To enable controlled ultrasound examinations on a human centrifuge, a robot arm is currently in use at DLR, Cologne (jointly developed with AMST-Systemtechnik GmbH Austria). The robot system has to be remotely controlled from an outside chamber. Similar robot arms are used for surgery [28, 29].The 6df tool provides diverse opportunities for research on learning, perceptual-motor and cognitive functions. The program was designed to abstract from any particular space station and to be applicable to trainees that differ in gender, age or culture. The hard- and software for the 6df tool is commercially available and usable for mobile applications. The configuration is applicable under field conditions, and the computer program can be configured by a normal computer user. It can be used either in an automatic rule-based mode or as a training aid for instructors, providing playback and analysis of performed tasks. It allows the self-study using basic video lessons, as well as defining “homework” for pattern drill. The 6df tool allows a wide range of psychophysiological research using standardized complex tasks. The herein used HealthLab system is recommended but any other polygraph can be used by standard interfaces.
6. Discussion and Perspectives
- A tool is presented here to investigate the learning and maintenance of complex manual control skills. The tool focusses on the perceptual, cognitive, and motor skills to manually control objects with six DoF. The tool combines performance assessment with the assessment of effort using physiological measurements and subjective evaluations.A prototype of the 6df tool has successfully been tested during the long-term space flight simulation Mars500 as educational tool. At least one participant, educated and trained with the 6df-system only, was finally performing the regular docking maneuver with the required quality. Actual developments include real-time feedback during the training flight, and the rules to select a particular task (level) based on the participants performance in former tasks.The ERP component P300 was affected by the difficulty of the task, which shows that they may be used as indicators of cognitive workload. This multi-level analysis provides new possibilities for future research, not only on docking training but also on manual control learning in general.
ACKNOWLEDGMENTS
- The very first prototype of the training tool was developed in cooperation with the Institute of Aerospace Medicine of the German Airforce. The experiment “6df” was evaluated and selected by ESA for the MARS500 project in the Institute of Biomedical Problems (IBMP), Russian Academy of Science, Moscow, Russia. Further development of the 6df hard- and software was granted by DLR to Koralewski Industrie Elektronik.