-
Paper Information
- Previous Paper
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
Electrical and Electronic Engineering
p-ISSN: 2162-9455 e-ISSN: 2162-8459
2019; 9(2): 35-40
doi:10.5923/j.eee.20190902.02

Upliftment of a Smart Humanoid Robot which is Conducted by Human Voice from Android Application
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLNimai Chandra Das1, Md. Wahidur Rahman2, Md. Elias Hossain3, Rony Shaha1
1Department of Electrical and Electronics Engineering, Daffodil International University, Dhaka, Bangladesh
2Department of Computer Science and Engineering, Mawlana Bhashani Science and Technology University, Tangail, Bangladesh
3Department of Software Engineering, Daffodil International University, Dhaka, Bangladesh
Correspondence to: Md. Wahidur Rahman, Department of Computer Science and Engineering, Mawlana Bhashani Science and Technology University, Tangail, Bangladesh.
| Email: |  |
Copyright © 2019 The Author(s). Published by Scientific & Academic Publishing.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

This research reflects on the development of a humanoid robot and its applications. Our developed robot has ability to talk, having capability to move, and shaking hand and interacting with human through voice. Two interrelated parts are responsible for the upliftment. First of all, the construction part, which is all about a suitable design for the humanoid robot, and Building of actual model. This parts including designing of a mechanical structure of the humanoid robot, settings of the layout and enhancing of the external body parts using (0.5mm) PVC board. We assembled the robot by adding the essential actuators and the required controllers. Secondly, the controlling part, which tracks out robot movement. We use the static walk approach for this task. That is maintaining the robot statically stable during both phases of its walking sequence which is the double support phase, and the single support phase. This section is achieved by keeping the robot's centre of within the support area. To conclude, this research is all about using static walking mechanism to make the humanoid. The robot has proficiency to move on a flat surface, in hopes of further improvements in the future.
Keywords: Arduino, Robot, AI (artificial Intelligence), Servo Motor, SD Card, Android
Cite this paper: Nimai Chandra Das, Md. Wahidur Rahman, Md. Elias Hossain, Rony Shaha, Upliftment of a Smart Humanoid Robot which is Conducted by Human Voice from Android Application, Electrical and Electronic Engineering, Vol. 9 No. 2, 2019, pp. 35-40. doi: 10.5923/j.eee.20190902.02.
Article Outline
1. Introduction
- According to Wikipedia, Humanoid robot is a kind of robot with a shape like human. The development of humanoid robot is increasing day by day. It is calculated that the growth of humanoid robots will be double in the year of 2025. Humanoid robot especially the ones with artificial intelligence algorithms, could be useful for future dangerous and space exploration missions, without any need to turn around and return to Earth. In this paper the objective of our work is to design, enrich, implement and control a humanoid robot and add some features and. This worthy contribution will be a starting point for us to develop more complex humanoids and integrate them with human purposes and our daily life. In this paper, we are going to find out the talking and moving mechanism of the humanoid robot using Arduino mega which is a microcontroller. With this controller unit we are going to present our project as “smart development of a humanoid robot” working procedure along with different features of the project. Humanoid robots are still a young technology with many research challenges. Only some humanoid robots are currently commercially available, often at high costs. In accordance with internet, the humanoid robot market will assign a vast CAGR of 40% in a sense of shipments over 2017-2025 in the field of military and health care sectors. Physical prototypes of robots are necessary to investigate the complex interactions between robots and human. To integrate and validate. This research results from the different research fields involved in humanoid robotics. The development of a humanoid robot platform according to a special target system at the beginning consuming hindrance. In this article, a process for humanoid robot systems is presented. The goal of this process is to minimize humanoid robot platforms by including the experience and knowledge gained in the development of humanoid robot components in the collaborative research. In this paper the main target is to interact robot with human.
2. Review Literature
- The paper [1] presents full integration of compact mobile robotics platform which is responsible for building Arduino controller board robot operating system (ROS). To reduce the development time, a driver boundary in ROS was created so as to provide hardware concepts and natural operation mode. Thus permitting researchers to focus basically in their main research enthusiasm e.g., exploration and rescue, multi-robot observation or cloud robotics. The paper [2] proposed Internet Controlled Robotic Arms. The crusade of the robot arm can be controlled by a computer through internet. The proposed system prove that a robot can be used for intimate a home in everyday human tasks. The robot is controlled by Arduino Uno. Two types of investigation were done for this system. First one is servo motor analysis and second one is accuracy test. The accuracy test show the result of server motor efficient output by comparing input that send to the Arduino Uno through the internet. This user friendly robot is predictable to bond the breach between robot and family errands.The paper [3] defines the implementation of four laboratory experimentations for Automatic Control and Robotics courses at the University of Alicante. The proposed system [3] was developed by using Arduino and other related equipment. The main purpose of this laboratory experiments are to introduce the Arduino platform to the student. On the one hand, students have to develop and identify the important motherboard for monitoring the hotness in the extrusion head, commonly called hot-end, of a standard 3D printer. The paper [4] describes to apply human robot interaction models based on tactile stimulus. An easy capacitive sensor field has been implemented for helping the humanoid-robot communication in manufacturing applications. The sensor is connected to Arduino controller and straddled on the robot. When the human machinist is in contact with the robot the change of capacitance is identified. The robot answers properly based on the input. The Arduino controller and MPR121 portion change in capacitance and related instructions are sent to the robot. The author of paper [5] tried to carry the importance of integrating educational robotics as a technological learning tool into regular curriculum for K-12 students and clarify how it helps the students preparing for the future. The robot is built for the student to learn C programming using Arduino IDE. The authors of paper [6] designed and implemented Human hand tracking system using MATLAB to control Arduino based robotic arms. The proposed system [6] shows the interface using Robot Arms. The system [6] is designed for controlling by human hand. The proposed system [6] are designed by image processing technique that identify variety of colour and variety of alignment of human hand. This system basically uses a technique for the development of arms and it’s very useable because it takes real-time video of hand and tracks received interface to the robot arms. The main purpose of this paper is to implement of Robotic Arms that will controlled by Human hand. The paper [7] describes the design and implementation a voice control robot (VCR) that control by voice command. The voice command is received by microphone and process by the voice module. When voice command recognize done then it will send command to microcontroller. The microcontroller processing the message and perform action. The hardware development board used ATmega 2560 development board. The author of paper [8] proposed and designed a voice control personal assistant robot. The proposed system [8] are control by android application. This robot can perform move left, move right by voice command that controller by android application. The voice command are process in real-time using online cloud server. The paper [9] describes Voice Control Object Tracking Smart Robot. A voice recognition usually used to recognize a fixed voice command such as, forward, backward, left, right. The voice command convert signal to text for communication that using online cloud server. The proposed system [9] consists of three sub-systems such as, speech recognition system, object tracking system and the differential-drive based movement’s control system. The paper [10] presented a design and implementation of Voice Recognition Robot with Real Time Surveillance and Automation. The proposed system [10] also developed the concept of real-time surveillance and automation which is accountable for an obstacle recognition and avoidance mechanism along with light and horn functions through predefined voice command. The authors of paper [14] designed spy car which is conducted through android application using wireless system. The also used operation of motors and servo motors as well as developed application.
3. Block Diagram and Working Procedure
- The proposed system consists of five major modules namely, servo motor/ actuator, Bluetooth module, SD card module, Speaker and microcontroller, Display unit and led. We use ATmage2596, which is 8 bit microcontroller. It finds wide application due to its features and low power.in our smart development of a humanoid robot. We use build in amplifier which come with speaker in market as a USB dual channel speaker. It provides us better sound quality in 8 bit microcontroller which passes signal to amplifier for getting output voice. Again, servo changes its position which is coded in controller unit and run as we want to move the robot hand, head and other section. Usually other function will execute as the system was composed for development of a robot like human. LCD display shows the execution of and different context to realize the humanoid robot.
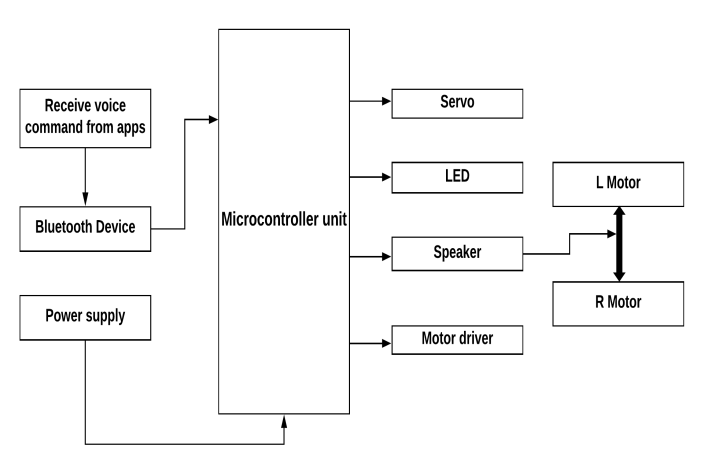 | Figure 1. Block Diagram of our proposed model |
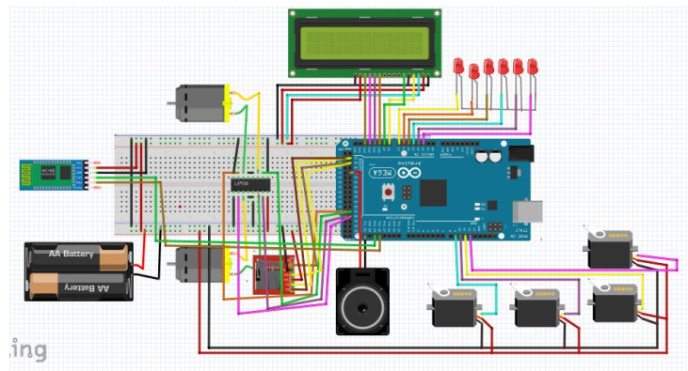 | Figure 2. Schematic Diagram of our proposed model |
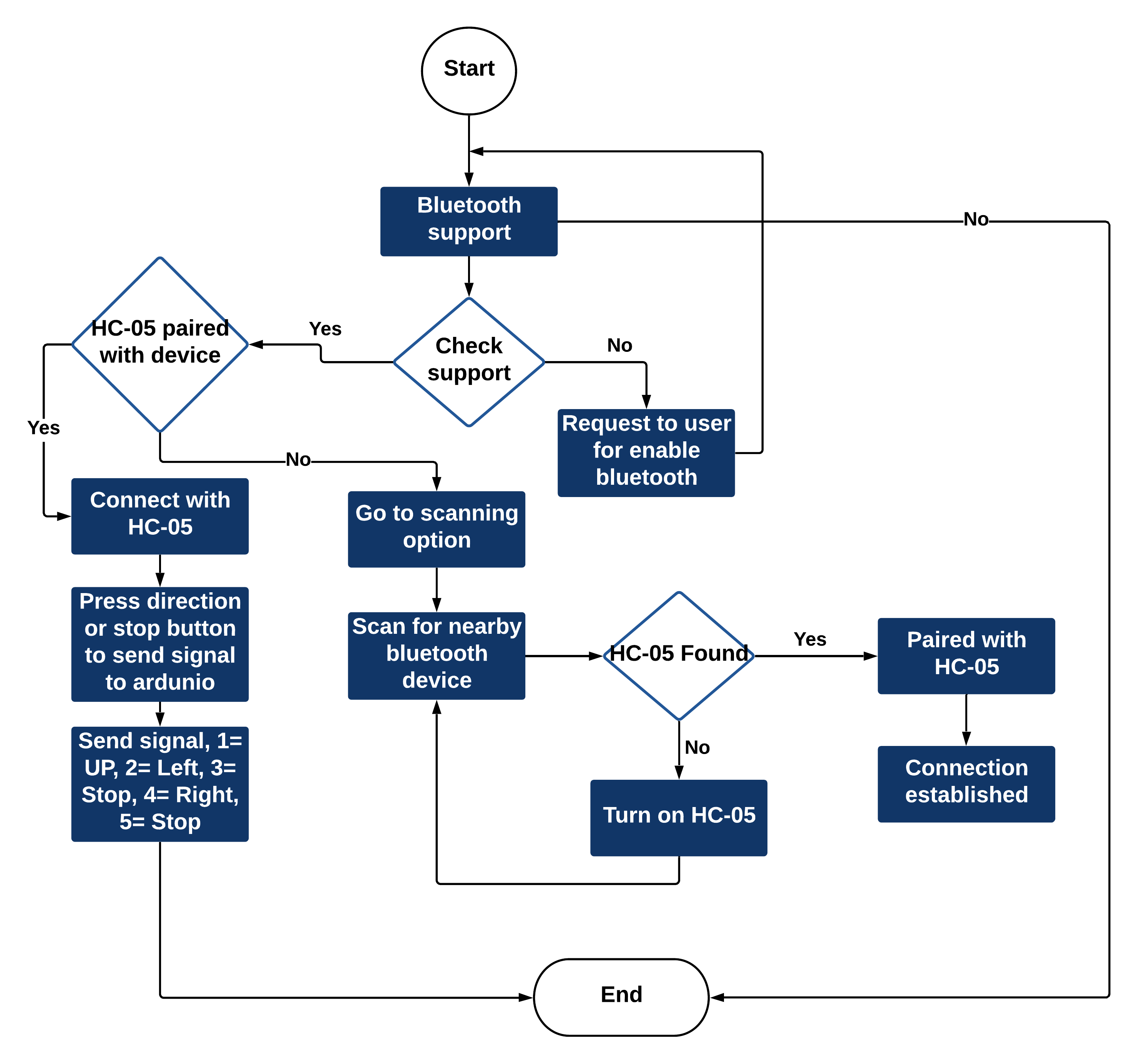
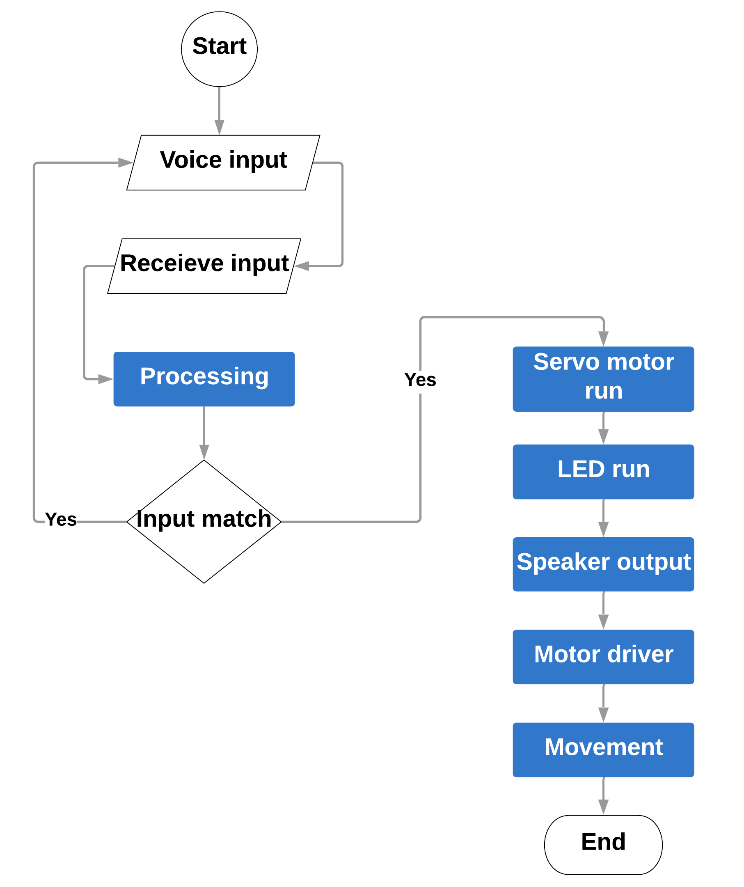 | Figure 3. Flow chart of working procedure of proposed system |
4. Analysis and Simulation
- In this part we are going to discuss about some sorts of simulation of our developed robot. Also we able to decide the components and how it’s easy to make our project.
4.1. Motor
- In this section we will discuss about our motor which is accountable for producing motion or action to move our robotic head and two hands. To accomplish this goal, we have to use the servo motor with rotating angle and simulation.
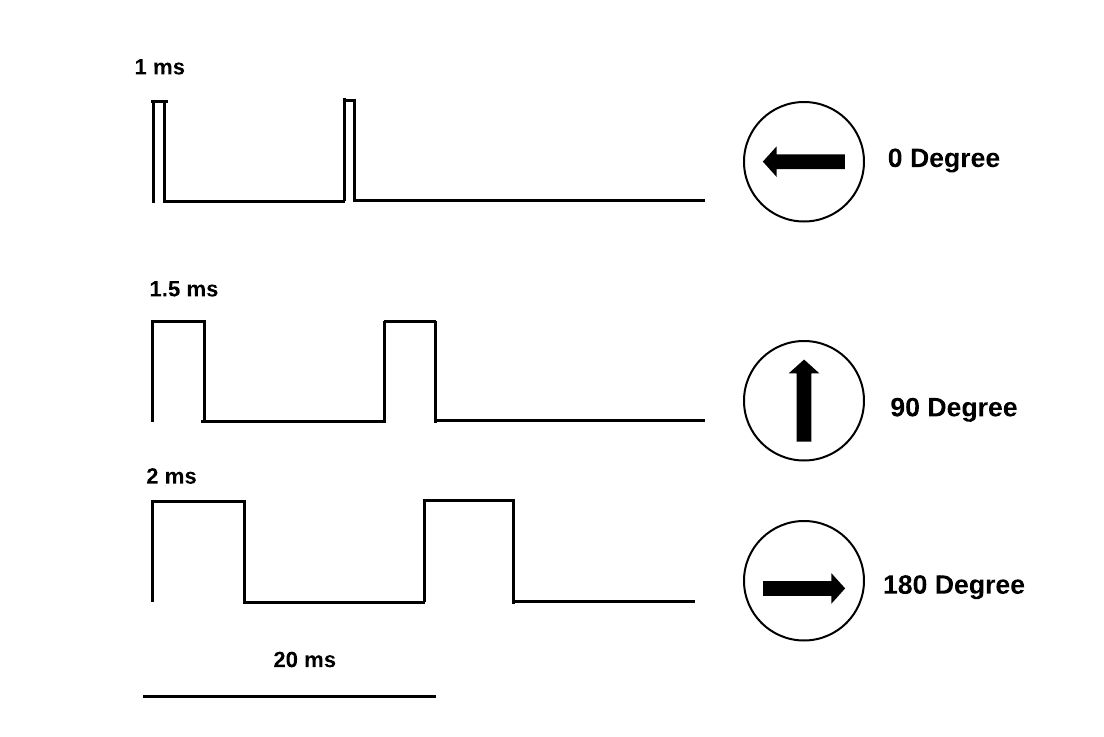 | Figure 4. Motor Position Angle with Time |
4.2. Speaker
- LTK5203 is a dual channel audio amplifier which amplify the low audio signal to high pass signal to get better audio output with speaker. LTK5203 passes the 8bit 16 kHz mono audio to the speaker. The Fig. 5 is shows its output simulation which is required to use in our research.
 | Figure 5. Output Wave Form of LTK5203 Speaker |
5. Working Procedure of Mobile Application
- To work application properly we have to use a pressing button. Basically we use google voice recognizer in our research. When the application receives a command, it has ability to send the signal to the Arduino mega through Bluetooth module.
 | Figure 6. Working principle of developed mobile application |
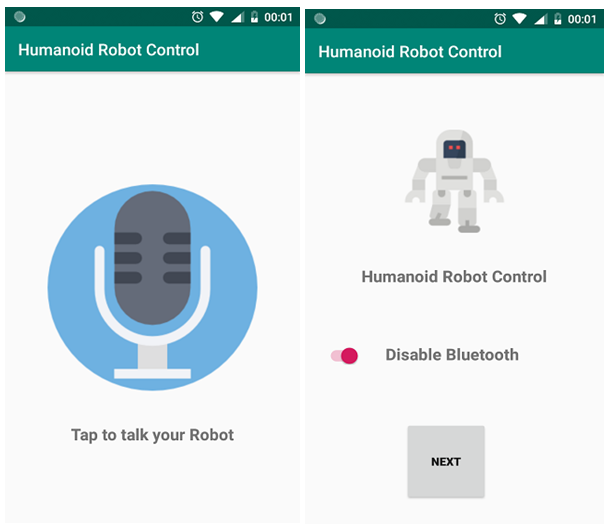 | Figure 7. Developed Mobile Application for our Humanoid Robot |
6. Developed Model Analysis
- In this project we experiment all the robot parts separately. The experiment for getting sound as an output of the robot is quite low and then we select a built in speaker which is buy from market. The servo is quite good during examination. We do checking of all the parts of robot is step by step. It’s become easier to us to reduce the circuit complexity and taking minimum time to stand the experimental setup.
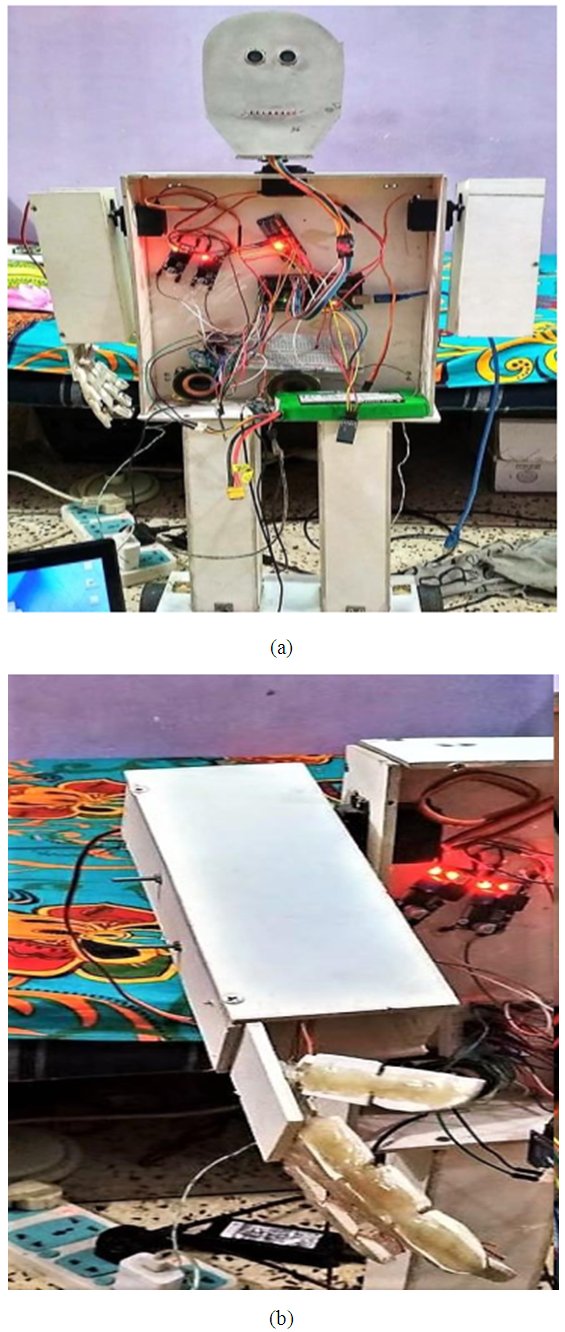 | Figure 8. (a) Whole Body. (b) Robotic arms of our developed model |
7. Applicable Areas
- Humanoid robots are now using as research tools in several scientific areas. Researchers are trying to discover the human body shape structures and behaviour (biomechanics) to build humanoid robots. On the other side, the attempt to simulate the human body leads to a better understanding of it. Human cognition is a field of study which is mainly focused on how humans learn from sensory information in order to acquire perceptual and motor skills. This knowledge is used to develop computational models of human behaviour and it has been improving day by day with highest qualitative research. 1. Humanoid robots are being enlarged to perform human tasks like personal assistance, by which they should be able to assist the sick and elderly, and messy or complicated jobs. 2. Humanoids are also fit for some procedurally-based vocations, such as reception desk administrators and automotive manufacturing line workers.3. In summary, since they can be used as tools and operate equipment and vehicles designed for the human form, humanoids could theoretically perform any task a human being can, so long as they have the proper software.4. They are also becoming increasingly popular as entertainers.5. They are being used in field of biomedical as an assistance of scientists to perform different complicated jobs.
8. Conclusions
- In conclusion we can say that this smart talking robot is a microcontroller based robot. This robot can talking, moving, shaking hand, rotating head to interact with the mentor who gives the command to complete the specific tasks. The execution of command shows in display unit and blink led for the specific command. We hope that this type of robot take a remark in the fields of robotics industry. In this project we have designed a humanoid robot by servo motor as its main motion provider & lithium polymer battery as its main source of power. PVC sheets have been used as a building block or body of the robot. We have finally succeeded in making the “Smart development of a humanoid robot” Satisfactorily. More knowledge is gained and more experiences are faced. Again, a lot of information are collected ultimately. We have concluded with a great pleasure for achieving our aim. We have planned to fulfil our technical requirements. The knowledge we have attained with this research, really would follow till the end of our career.
ACKNOWLEDGEMENTS
- We would like to express our sincere gratitude to our honourable supervisor, Mr. Md. Dara Abdus Satter, Assistant Professor, Department of Electrical and Electronic Engineering, DIU who inspired us in every moment. We are thankful to him for his continuous encouragement, kind co-operation, and scholastic guidance all along the project work. He has always been extremely generous with his time, knowledge and ideas and allowed us great freedom in this research. We also want to convey our thankfulness to Md. Wahidur Rahman from Mawlana Bhashani Science and Technology University for his massive help for preparing this manuscript, support and constant encouragement.