| [1] | Chasles, M. (1830). "Note sur les propriétés générales du système de deux corps semblables entr'eux". Bulletin des Sciences Mathématiques, Astronomiques, Physiques et Chemiques (in French). 14: 321–326. |
| [2] | Merz, John (1903). A History of European Thought in the Nineteenth Century, Blackwood, London. p. 5. |
| [3] | Edmund Whittaker, A Treatise on the Analytical Dynamics of Particles and Rigid Bodies, Cambridge University Press, 1904, 1937. |
| [4] | Irving Porter Church Mechanics of Engineering, Wiley, New York, 1908; p. 111. |
| [5] | Thomas Wright, Elements of Mechanics Including Kinematics, Kinetics, and Statics, With Applications, Nostrand, New York, 1909. |
| [6] | Eduard Study (D.H. Delphenich translator), Foundations and goals of analytical kinematics. Sitzber. d. Berl. math. Ges. 1913, 13, 36-60. Available online at (accessed on 14 Apr 2017), http://neo-classical-physics.info/uploads/3/4/3/6/34363841/study-analytical_kinematics.pdf. |
| [7] | Gray, Andrew (1918), A Treatise on Gyrostatics and Rotational Motion, MacMillan, London, 1918 (published 2007 as ISBN 978-1-4212-5592-7). |
| [8] | Rose, M. E. (1957), Elementary Theory of Angular Momentum, New York, NY: John Wiley & Sons (published 1995), ISBN 978-0-486-68480-2. |
| [9] | Thomas Kane, Analytical Elements of Mechanics Volume 1, Academic Press, New York and London, 1959. |
| [10] | Thomas Kane, Analytical Elements of Mechanics Volume 2 Dynamics, Academic Press, New York and London, 1961. |
| [11] | William Thompson, Space Dynamics, Wiley and Sons, New York, 1961. |
| [12] | Donald Greenwood, Principles of Dynamics, Prentice-Hall, Englewood Cliffs, 1965 (reprinted in 1988 as 2nd ed.), ISBN: 9780137089741. |
| [13] | Ai Chzcn Fung and Benjumin G. Zimmermun (1969). Digital Simulation of Rotational Kinematics. NASA Technical Report NASA TN D-5302. October 1969. Washington, D.C. (https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/19690029793.pdf). |
| [14] | D.M. Henderson (1977). Euler Angles, Quaternions, and Transformation Matrices – Working Relationships. McDonnell Douglas Technical Services Co. Inc., as NASA Technical Report NASA-TM-74839. July 1977. (https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/19770024290.pdf). |
| [15] | D.M. Henderson (1977). Euler Angles, Quaternions, and Transformation Matrices – Working Relationships. McDonnell Douglas Technical Services Co. Inc., as NASA Technical Report NASA-TM-74839. July 1977. (https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/19770024290.pdf). |
| [16] | D.M. Henderson (1977). Euler Angles, Quaternions, and Transformation Matrices for Space Shuttle Analysis. McDonnell Douglas Technical Services Co. Inc., Houston Astronautics Division as NASA Design Note 1.4-8-020, 9 June 1977. (https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/19770019231.pdf). |
| [17] | Herbert Goldstein, Classical Mechanics 2nd Ed., Addison-Wesley, Massachusetts, 1981. |
| [18] | Thomas Kane, David Levinson, Dynamics: Theory and Application, McGraw-Hill, 1985. |
| [19] | Peter Huges, Spacecraft Attitude Dynamics, Wiley and Sons, New York, 1986. |
| [20] | William Wiesel, Spaceflight Dynamics, 2nd ed., Irwin McGraw-Hill, Boston, 1989, 1997. |
| [21] | Bong Wie, Space Vehicle Dynamics and Control, AIAA, Virginia, 1998. |
| [22] | Gregory G Slabaugh (1999). Computing Euler angles from a rotation matrix. 6(2000) 39-63. January 1999. (http://www.close-range.com/docspacecraftomputing_Euler_angles_from_a_rotation_matrix.pdf). |
| [23] | David Vallado, Fundamentals of Astrodynamics and Applications, 2nd ed., Microcosm Press, El Segundo, 2001. |
| [24] | Carlos Roithmayr, Dewey Hodges, Dynamics: Theory and Application of Kane’s Method, Cambridge, New York, 2016. |
| [25] | Timothy Sands, Richard Mihalik. Outcomes of the 2010 and 2015 nonproliferation treaty review conferences. World J. Soc. Sci. Humanities, 2: 46-51, 2016. DOI: 10.12691/wjssh-2-2-4. |
| [26] | Sands, T., 2016. Strategies for combating Islamic state. Soc. Sci., 5: 39-39. DOI: 10.3390/socsci5030039. |
| [27] | Mihalik, R., H. Camacho and T. Sands, 2017. Continuum of learning: Combining education, training and experiences. Education, 8: 9-13. DOI: 10.5923/j.edu.20180801.03. |
| [28] | Timothy Sands, Harold Camacho and Richard Mihalik, 2017. Education in nuclear deterrence and assurance. J. Def. Manag., 7: 166-166. DOI: 10.4172/2167-0374.1000166. |
| [29] | Timothy Sands, Richard Mihalik, (2018). Theoretical Context of the Nuclear Posture Review. Journal of Social Sciences, 14(1) 124-128, DOI 10.3844/jssp.2018.124.128. (http://thescipub.com/pdf/10.3844/jssp.2018.124.128). |
| [30] | Timothy Sands, Harold Camacho and Richard Mihalik, 2018. Nuclear Posture Review: Kahn Vs. Schelling…and Perry. Journal of Social Sciences 2018, Volume 14:145-154. DOI: 10.3844/jssp.2018.145.154. |
| [31] | Sands, T, 2009. Satellite electronic attack of enemy air defenses. Proc. IEEE CDC. 434-438. DOI: 10.1109/SECON.2009.5174119. |
| [32] | Timothy Sands, 2018. Space mission analysis and design for electromagnetic suppression of radar. Intl. J. Electromag. and Apps., 8: 1-25. DOI: 10.5923/j.ijea.20180801.01. |
| [33] | Timothy Sands, Danni Lu, Janhwa Chu, Baolin Cheng, Developments in Angular Momentum Exchange, International Journal of Aerospace Sciences, Vol. 6 No. 1, 2018, pp. 1-7. doi: 10.5923/j.aerospace.20180601.01. |
| [34] | Timothy Sands, Jae Kim, Brij Agrawal., 2006. 2H Singularity free momentum generation with non-redundant control moment gyroscopes. Proc. IEEE CDC. 1551-1556. DOI: 10.1109/CDC.2006.377310. |
| [35] | Timothy Sands, Fine Pointing of Military Spacecraft. Ph.D. Dissertation, Naval Postgraduate School, Monterey, CA, USA, 2007. |
| [36] | Jae Kim, Timothy Sands, Brij Agrawal, 2007. Acquisition, tracking, and pointing technology development for bifocal relay mirror spacecraft. Proc. SPIE, 6569. DOI: 10.1117/12.720694. |
| [37] | Timothy Sands, Jae Kim, Brij Agrawal, 2009. Control moment gyroscope singularity reduction via decoupled control. Proc. IEEE SEC. 1551-1556. DOI: 10.1109/SECON.2009.5174111. |
| [38] | Timothy Sands, Jae Kim, Brij Agrawal, 2012. Nonredundant single-gimbaled control moment gyroscopes. J. Guid. Dyn. Contr. 35: 578-587. DOI: 10.2514/1.53538. |
| [39] | Timothy Sands, Jae Kim, Brij Agrawal, 2016. Experiments in Control of Rotational Mechanics. Intl. J. Auto. Contr. Intel. Sys., 2: 9-22. ISSN: 2381-7534. |
| [40] | Brij Agrawal, Jae Kim, Timothy Sands, “Method and apparatus for singularity avoidance for control moment gyroscope (CMG) systems without using null motion”, U.S. Patent 9567112 B1, Feb 14, 2017. |
| [41] | Timothy Sands, Jae Kim, Brij Agrawal, 2018. Singularity Penetration with Unit Delay (SPUD). Mathematics, 6: 23-38. DOI: 10.3390/math6020023. |
| [42] | Timothy Sands, Robert Lorenz, “Physics-Based Automated Control of Spacecraft” Proceedings of the AIAA Space 2009 Conference and Exposition, Pasadena, CA, USA, 14–17 September 2009. |
| [43] | Timothy Sands, 2012. Physics-based control methods. Adv. Space. Sys. Orb. Det., InTech, London. DOI: 10.5772/2408. |
| [44] | Timothy Sands, “Improved Magnetic Levitation via Online Disturbance Decoupling”, Physics Journal, 1(3) 272-280, 2015. |
| [45] | Scott Nakatani, 2014. Simulation of spacecraft damage tolerance and adaptive controls, Proc. IEEE Aero., 1-16. DOI: 10.1109/AERO.2014.6836260. |
| [46] | Scott Nakatani, 2016. Autonomous damage recovery in space. Intl. J. Auto. Contr. Intell. Sys., 2(2): 22-36. ISSN Print: 2381-75. |
| [47] | Scott Nakatani, 2018. Battle-damage tolerant automatic controls. Elec. and Electr. Eng., 8: 10-23. DOI: 10.5923/j.eee.20180801.02. |
| [48] | Peter Heidlauf, Matthew Cooper, “Nonlinear Lyapunov Control Improved by an Extended Least Squares Adaptive Feed forward Controller and Enhanced Luenberger Observer”, In Proceedings of the International Conference and Exhibition on Mechanical & Aerospace Engineering, Las Vegas, NV, USA, 2–4 October 2017. |
| [49] | Matthew Cooper, Peter Heidlauf, Timothy Sands, 2017. Controlling Chaos—Forced van der Pol Equation. Mathematics, 5: 70-80. DOI: 10.3390/math5040070. |
| [50] | Timothy Sands, “Phase Lag Elimination At All Frequencies for Full State Estimation of Spacecraft Attitude”, Physics Journal, 3(1) 1-12, 2017. |
| [51] | Timothy Sands, 2017. Nonlinear-adaptive mathematical system identification. Computation. 5:47-59. DOI: 10.3390/computation5040047. |
| [52] | Sands, T., "The Catastrophe of Electric Vehicle Sales", Mathematics", 5(3), 46, 2017. |
| [53] | Sands, T., "Electric Vehicle Sales Catastrophe Averted by Deterministic Artificial Intelligence Methods", Applied Sciences, submitted to special issue Electric Vehicle Charging, 2018. ISSN 2076-3417. |
| [54] | Timothy Sands, Thomas Kenny, 2017. Experimental piezoelectric system identification, J. Mech. Eng. Auto, 7: 179-195. DOI: 10.5923/j.jmea.20170706.01. |
| [55] | Timothy Sands, 2017. Space systems identification algorithms. J. Space Expl. 6: 138-149. ISSN: 2319-9822. |
| [56] | Timothy Sands, “Experimental Sensor Characterization”, Journal of Space Exploration, 7(1) 140, 2018. |
| [57] | Timothy Sands, Armani, C., 2018. Analysis, correlation, and estimation for control of material properties. J. Mech. Eng. Auto. 8: 7-31, DOI: 10.5923/j.jmea.20180801.02. |
| [58] | “Remarks by President Trump at a Meeting with the National Space Council and Signing of Space Policy Directive-3”, Available online at the White House’s online news website: http://suo.im/4P2Duw (Accessed 20 June 2018). |
| [59] | Jack Kuipers, “Quaternions and Rotation Sequences, Geometry, Integrability, and Quantization”, Sept 1-10, 1999 Varna, Bulgaria; Coral Press, Sofia, 2000. |
| [60] | Brendon Smeresky, Alexa Rizzo, Timothy Sands, 2018. Kinematics in the Information Age. Mathematical Engineering, a special issue of Mathematics 6(9) 148. DOI: 10.3390/math6090148. |
| [61] | Kevin Bollino, Isaac Kaminer, Anthony Healey, Timothy Sands, 2018. Autonomous Minimum Safe Distance Maintenance from Submersed Obstacles in Ocean Currents. J. Mar. Sci. Eng. 6(3), 98. |
| [62] | Weisstein, Eric W. "Taylor Series. From MathWorld- A Wolfram Web Resource www.mathworld.wolfram.com/TaylorSeries.html. |
| [63] | Baczynski, Michael. Fast and Accurate Sine/Cosine Approximation, 18 July 2007, www.lab.polygonal.de/2007/07/18/fast-and-accurate-sinecosine-approximation/. |
| [64] | Keith Lobo, Jonathan Lang, Anthony Starks, Timothy Sands, 2018. Analysis of deterministic artificial intelligence for inertia modifications and orbital disturbances, International Journal of Control Science and Engineering, Vol. 8 No. 3, 2018, pp. 53-62. doi: 10.5923/j.control.20180803.01. |
| [65] | Timothy Sands, “Derivative Analysis of global average temperatures”, Climate, submitted to Volume (6), 2018. |
| [66] | Lucas Bittick, Timothy Sands, “Political Rhetoric or Policy Shift: A Contextual Analysis of the Pivot to Asia”, Journal of Social Sciences, submitted to Volume (14) 2018. |

 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTML

 [3], where m is the mass of the object and [J] is a matrix of mass moments of inertia; meanwhile kinematics [6] are mutually equivalent expressions of the inertial values in Euler’s equations. “The dynamics” are comprised of the kinetics described in Euler’s equations together with a chosen set of kinematics [60].
[3], where m is the mass of the object and [J] is a matrix of mass moments of inertia; meanwhile kinematics [6] are mutually equivalent expressions of the inertial values in Euler’s equations. “The dynamics” are comprised of the kinetics described in Euler’s equations together with a chosen set of kinematics [60].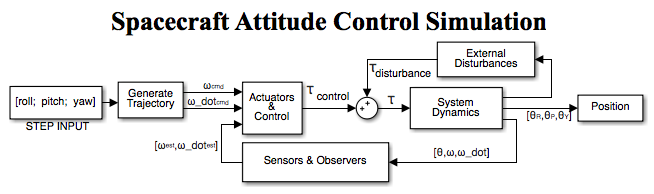
 denotes the time-derivative,
denotes the time-derivative,  .
. 

 , while angular acceleration is depicted by
, while angular acceleration is depicted by  . Coupled motion in the governing equations of dynamics are evident in the
. Coupled motion in the governing equations of dynamics are evident in the  term of equation (5), where
term of equation (5), where  is the angular momentum whose time-rate of change is
is the angular momentum whose time-rate of change is  . Motion is all axes results from any motion in any axis due to the coupling terms, and the amount of motion in each axis is scaled by the mass moment of inertia terms, which behave like “gains”. Manipulation of equation (2) help isolate the angular velocity of the body per [60]. Differentiating yields the angular acceleration
. Motion is all axes results from any motion in any axis due to the coupling terms, and the amount of motion in each axis is scaled by the mass moment of inertia terms, which behave like “gains”. Manipulation of equation (2) help isolate the angular velocity of the body per [60]. Differentiating yields the angular acceleration  which appears in the produt
which appears in the produt  , permitting multiplication by the matrix inverse [J]-1 and then integrated as per equations 2 and 3. Kinematic Euler Angles are calculated from these angular velocity
, permitting multiplication by the matrix inverse [J]-1 and then integrated as per equations 2 and 3. Kinematic Euler Angles are calculated from these angular velocity  displayed in equation (3).
displayed in equation (3).

 in equations (4)-(6) include the regression parameterization of the feedforward control, where
in equations (4)-(6) include the regression parameterization of the feedforward control, where  is a vector of mass moment of inertia components.
is a vector of mass moment of inertia components. 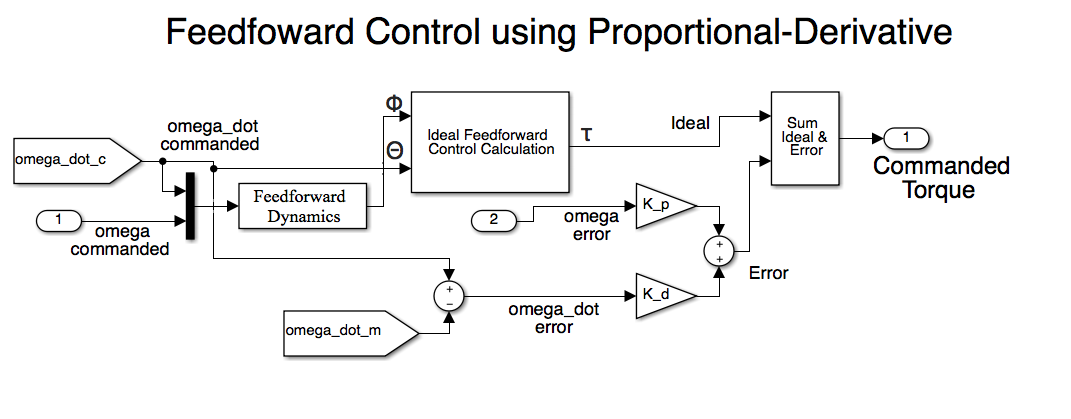




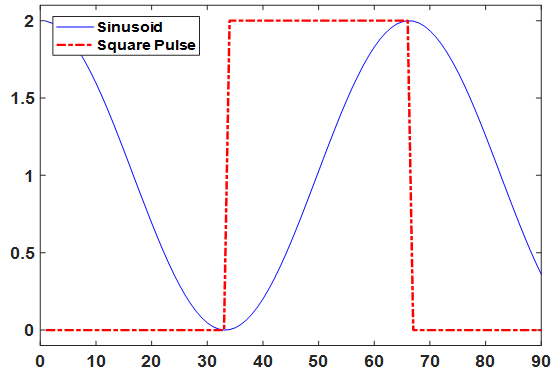
 . The phase on the sine curve, used to shift the trajectory curve for smooth onset, is denoted by
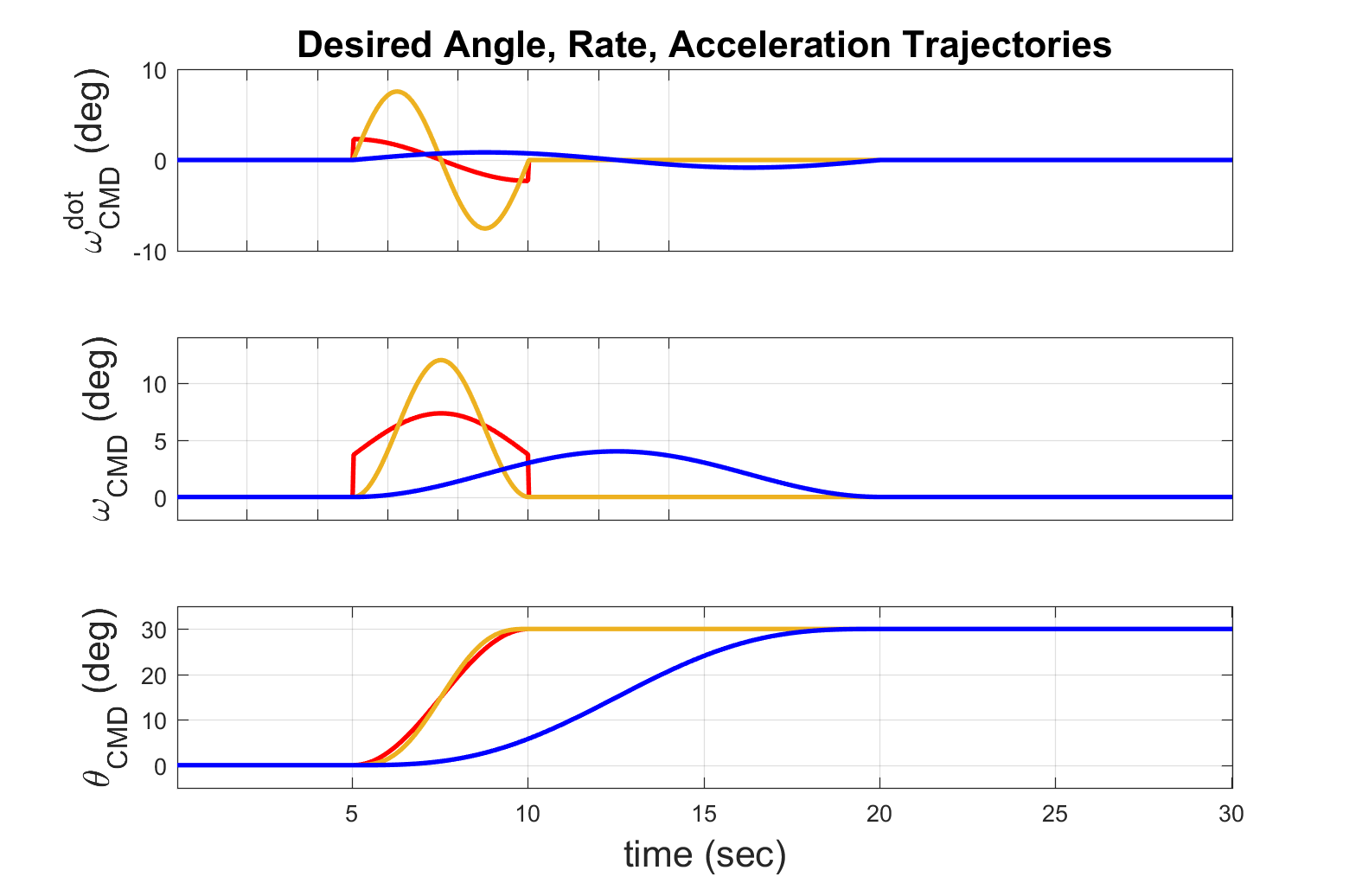
. The phase on the sine curve, used to shift the trajectory curve for smooth onset, is denoted by  . Using the Commanded Euler Angle and the Desired Slew time in conjunction with figure 1, the commanded maneuver is translated into a trajectory using various sine curves. Equation 8 above is elaborated with equations 9-11 below to investigate and compare numerical methods.
. Using the Commanded Euler Angle and the Desired Slew time in conjunction with figure 1, the commanded maneuver is translated into a trajectory using various sine curves. Equation 8 above is elaborated with equations 9-11 below to investigate and compare numerical methods. 


 via the MATLAB sine wave function.
via the MATLAB sine wave function.


 is (π/Δt) where (Δt) is the desired maneuver time. The
is (π/Δt) where (Δt) is the desired maneuver time. The  term allows for a quiescent period and -π/2 term allows for a proper phase shift to implement the sinusoidal half period of Figure 6. The effect of this can be seen later on in section 3. Equations 13 and 14 are just successive derivatives of equation 12 used to generate angular velocity and acceleration which are fed into the ideal feedforward control equations 5-7, which resides in the torque generator block of Figure 1. This produces an output torque which drives the Dynamics. From equations 12-14 it can be clearly seen that the argument of the sine and cosine terms always follow the form of equation 15. We can use this to implement our Taylor Series and the other two other algorithms on equal footing.
term allows for a quiescent period and -π/2 term allows for a proper phase shift to implement the sinusoidal half period of Figure 6. The effect of this can be seen later on in section 3. Equations 13 and 14 are just successive derivatives of equation 12 used to generate angular velocity and acceleration which are fed into the ideal feedforward control equations 5-7, which resides in the torque generator block of Figure 1. This produces an output torque which drives the Dynamics. From equations 12-14 it can be clearly seen that the argument of the sine and cosine terms always follow the form of equation 15. We can use this to implement our Taylor Series and the other two other algorithms on equal footing.