-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
Electrical and Electronic Engineering
p-ISSN: 2162-9455 e-ISSN: 2162-8459
2018; 8(1): 1-9
doi:10.5923/j.eee.20180801.01

The Design of Electrical Wheelchairs with Electromyography Signal Controller for People with Paralysis
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLEndro Yulianto1, Tri Bowo Indrato1, Suharyati2
1Electromedical Engineering Department, Health Polytechnic of Surabaya, Surabaya, Indonesia
2Electromedical Engineering Department, Health Polytechnic of Jakarta II, Jakarta, Indonesia
Correspondence to: Endro Yulianto, Electromedical Engineering Department, Health Polytechnic of Surabaya, Surabaya, Indonesia.
| Email: |  |
Copyright © 2018 Scientific & Academic Publishing. All Rights Reserved.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

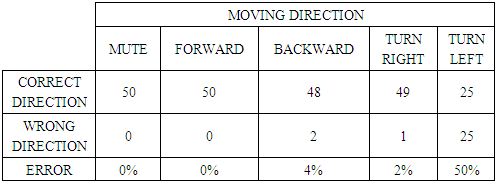
The paralytics suffering the paralysis almost in all parts of the body particularly hands and feet are not able to move the wheelchair with a manual controller, joysticks or button. This condition certainly needs an alternative controller to move the electric wheelchair. This research attempts to develop the innovation alternative controlling technology to the wheelchair for those suffering from paralysis particularly to feet and hand by doing an engineering of the electric wheelchair using the control of electromyography (EMG) signal from the result of the muscle relaxation. The EMG signal was tapped from 4 muscle spots as the command to turn right, turn left, move forward and backward. The change of the amplitude value of EMG signal when the muscles did contraction was used as the trigger of electric wheelchair motor. The EMG signal that had the amplitude in the order of millivolt must be strengthened to be the volt order purposely to be capable of being read by the range of the analogue to digital converter. In addition, the EMG signal obtained from the tapping still contained more noise signals. Microcontroller functioned to receive the digital signal from the circuit of analogues to digital converter to be later processed and used for the control of the wheelchair. This research used the control system we call as Bioelectric Adjustable Threshold System (BAST) to detect the power of the muscle contraction of the user at the beginning of the usage to later be saved and used as the value of the voltage reference to run the control system of wheelchair. The result of the test on the system by giving 50 times of command for movement showed that the forward movement had the best performance with the error value of 0% and the worst one was found in the command of turning left with the error value of 50%.
Keywords: Wheelchair, Electromyograpy, Paralysis
Cite this paper: Endro Yulianto, Tri Bowo Indrato, Suharyati, The Design of Electrical Wheelchairs with Electromyography Signal Controller for People with Paralysis, Electrical and Electronic Engineering, Vol. 8 No. 1, 2018, pp. 1-9. doi: 10.5923/j.eee.20180801.01.
1. Introduction
- The result of the National Socioeconomic survey conducted by BPS (Indonesian Statistics Bureau) in 2012 revealed that the number of disabled people in Indonesia reached 6.008.661 people, 616.387 and more or less 2.401.592 of whom were those with the body disability and doubled disabilities respectively. The population of the number of such disabilities certainly could be more in consideration to the existence of many remote areas that cannot be accessed by the survey agents. The high rate of the people with such disability certainly becomes the concern of the government not simply regarding the facilities in the form of building, road or any transportation modes but also the program to improve the life quality in the form of physical therapy. The physical therapy is a paralysis management focused on the movement. It is useful to help the paralytics by using the muscles that can function normally to prevent any shortening muscles and physical defect. The physical therapy can be done by means of the suitable aid in the form of body support and wheelchair. The technology of wheelchair has been more developed. The manual wheelchair moved from using the pushing power by hands designed with a very light, small and foldable shape to the one that could be moved with joystick or buttons has been improved to ease and give comfort in mobility for the paralytics. However, for those suffering the paralysis in most of parts of their body particularly hands and feet and unable to move the wheelchair using the joysticks or button, a technology innovation is required move the electric wheelchair with an alternative controller. The research using the alternative controller of the electric wheelchair has been widely developed. Some of the alternative controllers for the electric wheelchair have been more studied such as the controller with the sound command (Pires, et al., 2001), and the controller with the head movement (Kalantri, et al., 2003) but the most widely used alternative controllers in the research recently is the one by using the bioelectric signals produced by body cells. Barea, et al., 2003 used the electrooculograph signal (EOG) – a bioelectric signal resulted from the movement of the eyeballs to control the electric wheelchair. Nikhil, et al., 2016 used the electroencephalograph signal (EEG). Taslim, et al., 2012, Sahebjad, et al., 2012, Mohammad, et al., 2008, Xu, et al., 2013, and Sathish, et al., 2016 used the EMG signal as the alternative controller for the electric wheelchair. Tien, et al., 2011 and Ahire, et al., 2015used the controller of the electric wheelchair by combining the electromyographsignal (EMG) and EOG. The EMG signal was used for the command to move forward and back and to turn right and left. Meanwhile, the EOG signal was used to manage the motor speed. This research conducted a design of the electric wheelchair with the control of EMG signal from the result of the contraction muscles that still functioned in 4 different tap points for the forward and backward movements and the movement to turn right and left. To make this electric wheelchair can be right used though there has been a change of amplitude value of the EMG signal of the users for the muscle fatigue or the wheelchair being used by other users that have a different power of muscle contraction from the previous user, there is a need to be supported with a system that can cope with this problem. This system is able to store the power of the muscle contraction from the user in the beginning of the use to be later used as the reference amplitude. This system we name the Bioelectric Ajustable Treshold System (BAST).
2. Fundamental
- Bioelectric signalis the signal occurred as a result of the displacement of Sodium (Na +) ions and Potassium (K +) ions from outside to inside the cell and vice versa due to the differences in the concentration value of the ions between the inside and outside of the cell. This phenomenon is called the electrical activity of cells that can occur as a result of stimulation from outside the cell in the form of electrical, mechanical and chemical stimuli.EMG signal refers to bioelectric signal generated by nerve cells when the muscles are in contraction and relaxation. When the muscles do the contractions there will be an increase in the amplitude value of EMG signal and will return to the initial state when the muscles do relaxation. The amplitude values of EMG signal vary greatly based upon the condition and strength of muscles of an individual when doing measurement. These values are in the range 0 to 10 millivolts with the frequency spectrum in the range 0 - 500Hz. The dominant frequency spectrum of EMG signal is in the range of 50 to 150 Hz. Figure 1 shows the description of the frequency spectrum of EMG signal.
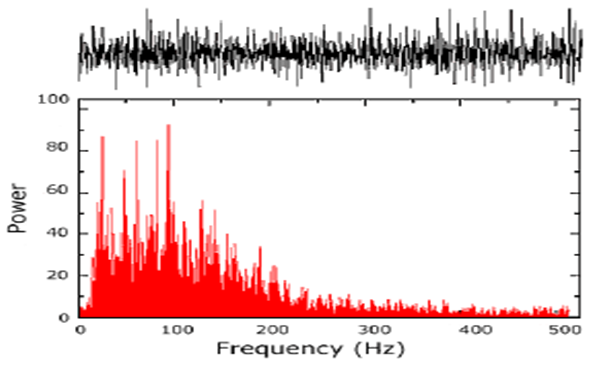 | Figure 1. Spectrum of frequency signal [5] |
3. Method
- The diagram of the research block is shown in Figure 2 below.
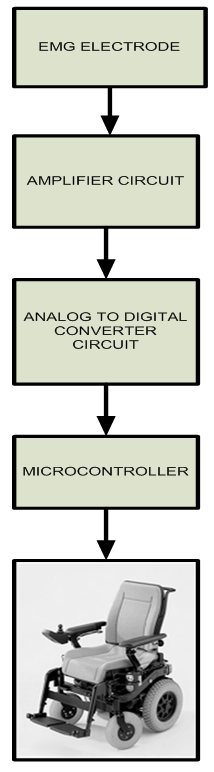 | Figure 2. The Block Diagram of the electric wheelchair with the control of EMG signal |
4. Result and Discussion
- In this research, the frame of the manual wheelchair was overhauled and assembled into the electric wheelchair by adding 2 electric motors on the wheel part. The electrical motor used to mobilize the wheelchair was in the type of the DC motor (direct current) with the power supply of 5 volts. This electrical motor was then installed on the overhauled manual wheelchair to the wheelchair that in the first time moved using the human power but now moved with the electric motor power.
 | Figure 3. DC Electric Motor of 5 Volts |
 | Figure 4. The overhauled manual wheelchair |
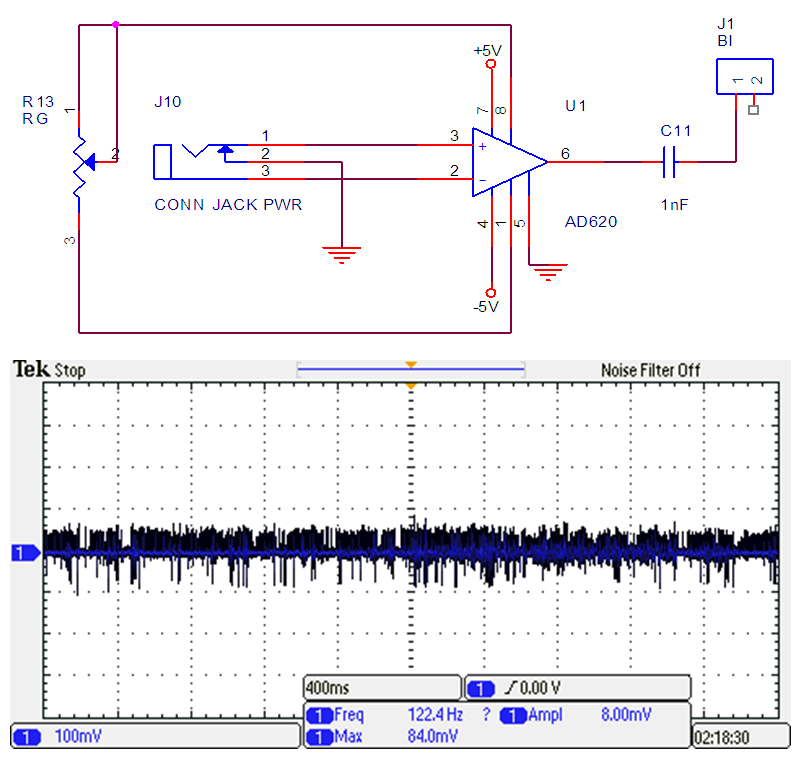 | Figure 5. The circuit and the result of the instrument support |
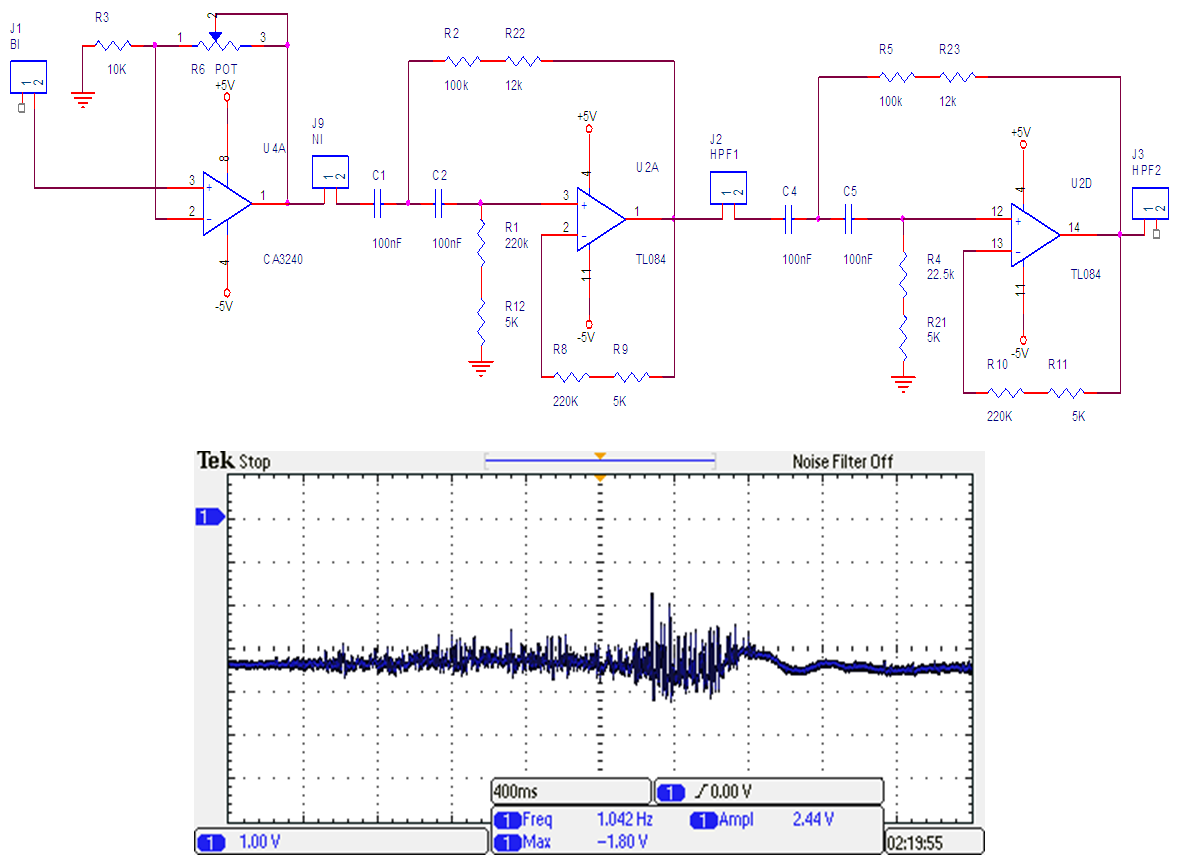 | Figure 6. The circuit and the result of the filter high-pass support at 10 Hz |
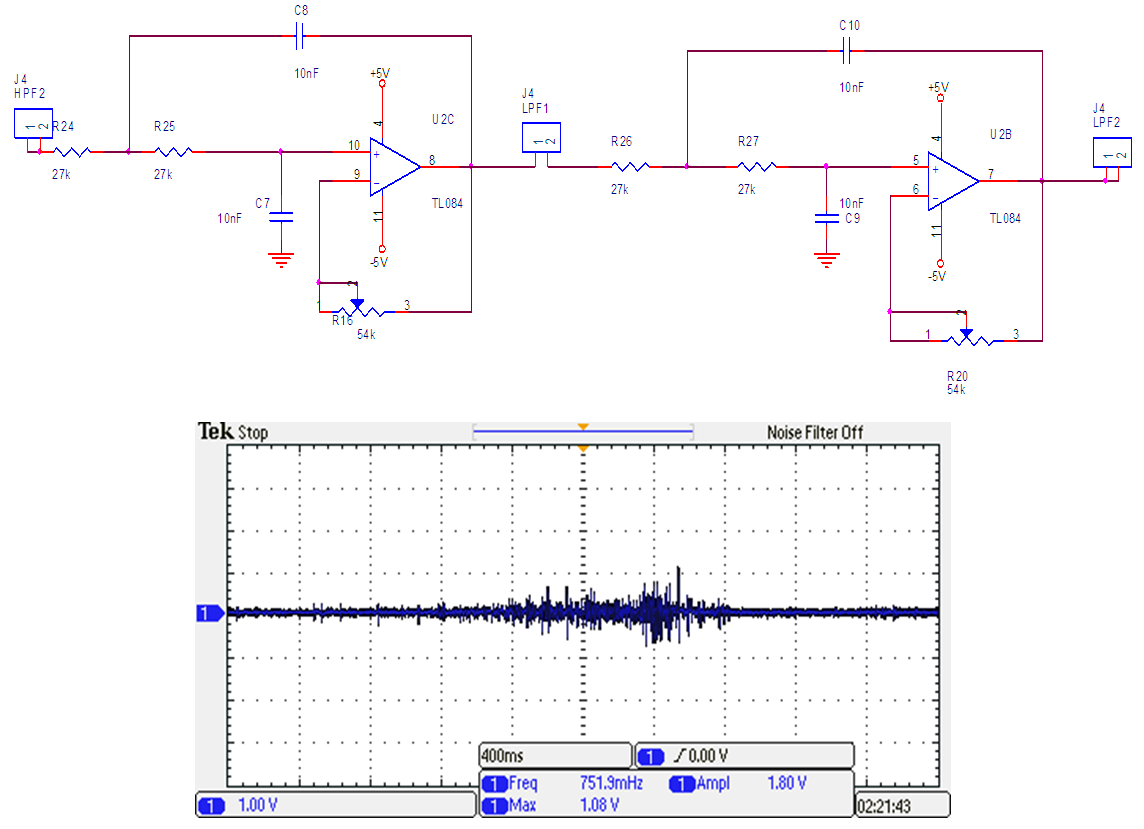 | Figure 7. The Circuit and the Result of the filter low support of 500 Hz |
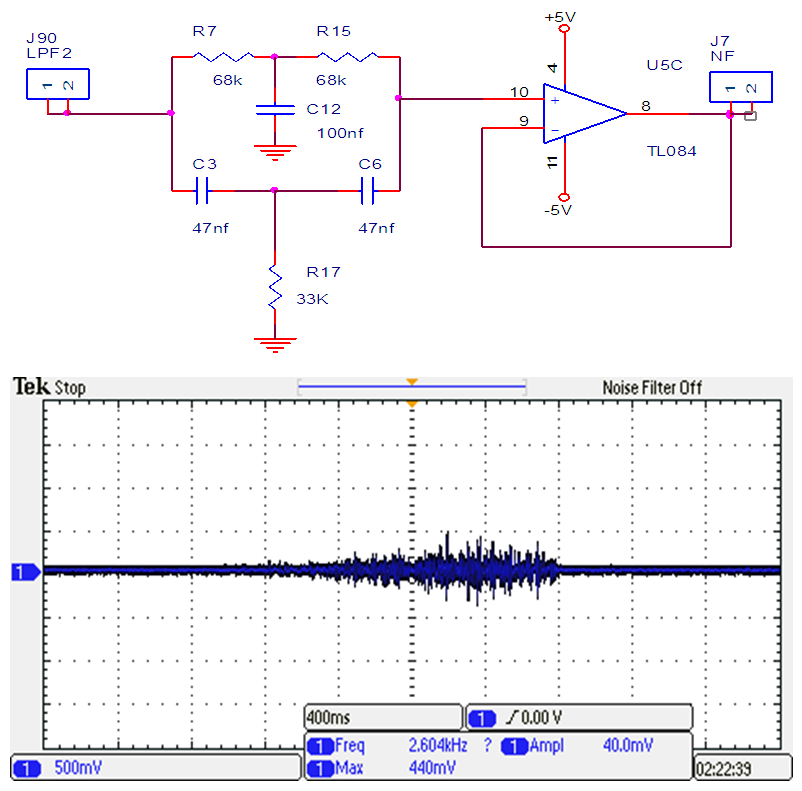 | Figure 8. The Circuit and the Result of the support of the of notch filter 50 Hz |
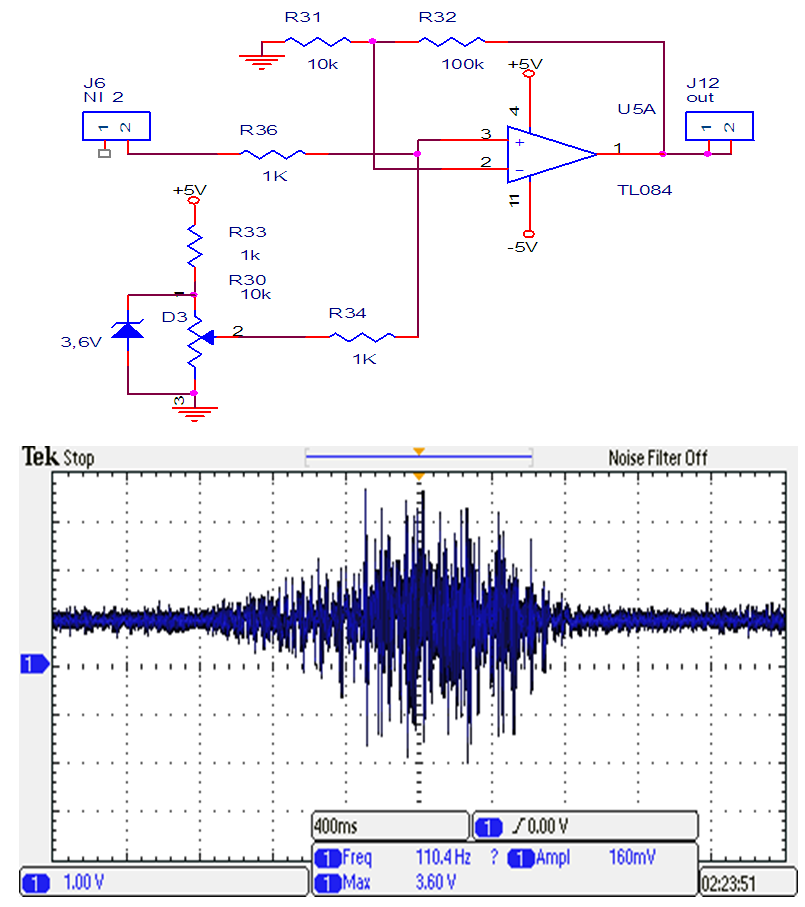 | Figure 9. Circuit and the Result of adder |
 | Figure 10. Electrode position on the right neck for the movement of turn right |
 | Figure 11. Electrode position on the left neck for the movement of turn left |
 | Figure 12. Electrode position on the forehead for the forward movement |
 | Figure 13. The electrode position on the shoulder for the backward movement |
 | Figure 14. The position of reference electrode |
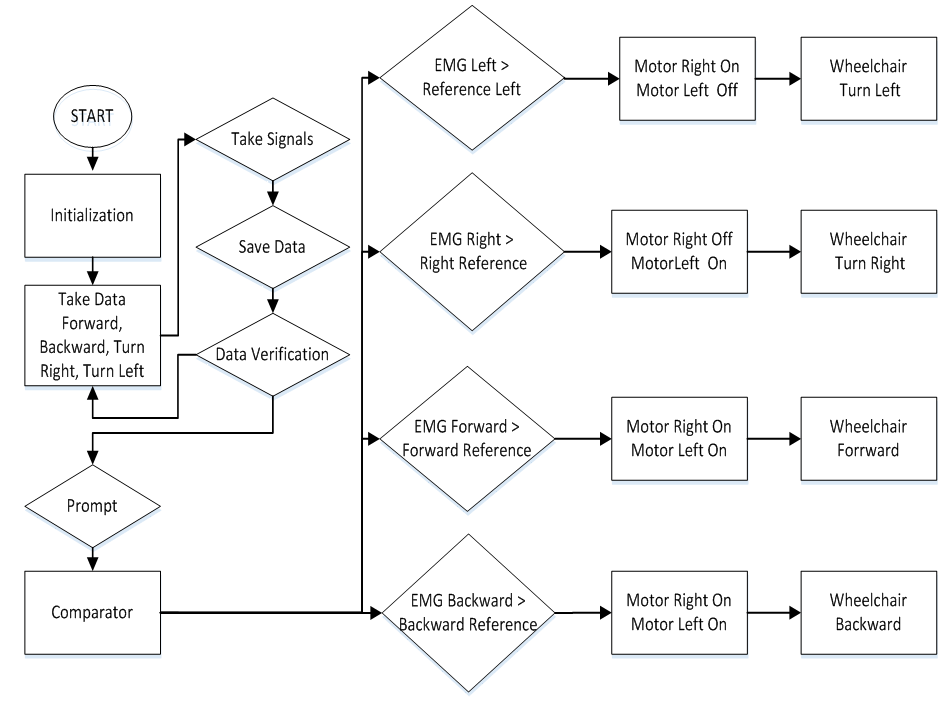 | Figure 15. Flowchart of BAST system |
|
5. Conclusions
- 1. The change of the amplitude value of the result of the contraction and relaxation of the muscle in the range of 3.4 – 4.4 volts in the contraction and 2 volts in the relaxation can be used as the controller of the electric wheelchair movement. 2. From the test, it can be obtained that the poorest performance of the wheelchair system was in the command to turn left with the error of 50%. It was because when the test, the user more dominantly used the right part of the body. This then has made the left part of the muscle just resulted in the EMG signal with little amplitude due to the weak muscle contraction.