-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
International Journal of Control Science and Engineering
p-ISSN: 2168-4952 e-ISSN: 2168-4960
2017; 7(2): 32-43
doi:10.5923/j.control.20170702.02

Comparative Study between Intelligent Algorithms for Active Force Control of Side Car Mirror Vibration
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLMohammad Gohari1, Mona Tahmasebi2
1Faculty of Mechanical Engineering, Arak University of Technology, Arak, Iran
2Agricultural Engineering Research Department, Markazi Agricultural and Natural Resources Research and Education Center Agricultural Research, Education and Extension Organization (AREEO), Arak, Iran
Correspondence to: Mohammad Gohari, Faculty of Mechanical Engineering, Arak University of Technology, Arak, Iran.
| Email: |  |
Copyright © 2017 Scientific & Academic Publishing. All Rights Reserved.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

Side and internal mirrors are used widely in vehicles to have better vision of road, and they play important role in driving controls. Whereas vehicles are exposed to vibration permanently due to road profile, generated vibration in mirrors produces image blurring. Thus maybe driver vision is affected by this issue and unwanted crashes are occurred. Some active vibration controllers were developed based on PID scheme, but this vibration is happen with high speed and conventional controllers cannot attenuate oscillation superiorly. Active force control (AFC) by providing extra feedback can enhance performance of controller in vibration cancelling when high speed disturbances are exciting. In this paper, AFC hybridized to iterative learning algorithm (IL) and neural network (NN). These two schemes were simulated and compared together to find best intelligent method for this purpose. Various disturbances were exerted to the systems, and accuracy and stability of controllers were reached. The results show that AFC-IL has better potential in noise termination compared to AFC-NN in car side mirror vibration reduction.
Keywords: Active force control, Side car mirror vibration, Iterative learning, Neural network
Cite this paper: Mohammad Gohari, Mona Tahmasebi, Comparative Study between Intelligent Algorithms for Active Force Control of Side Car Mirror Vibration, International Journal of Control Science and Engineering, Vol. 7 No. 2, 2017, pp. 32-43. doi: 10.5923/j.control.20170702.02.
Article Outline
1. Introduction
- One of the negative effects of vehicle vibration is oscillation of internal and external car mirror. This vibration is results of transmitted vibration from chassis generated by road roughness and induced vibration by wind. The reflected image is blurred by side car mirror vibration, and it is not tolerable by drivers. Some times, blurring image in mirror reduces vision of driver, and this is serious problem in terms of safety. To diminish mirror vibration as problem, mechanical structures of side car mirrors were optimized and mass of those were reduced, but vibration problem still remained. Some passive isolators and active vibration controllers were employed to avoid resonating of mirror. The earlier study on car mirror vibration was done by O'Grady et al., via finite element modeling (FEM) [1]. In another research, the geometry of mirror and stiffness of that was optimized by FEM [2]. Furthermore, induced vibration generated in side car mirror was modeled by Homsi et al., employing computational fluid dynamics (CFD) software and structure of that modified to minimize the unwanted vibration [3]. Additionally, two US patents were submitted which related to vibration reduction side car mirror (US Patent No.5, 818,650 and No.5, 327,288). These inventions use the passive suspension to isolate mirror from car body vibrations. Next, the primary work suggested to use active mirror vibration control were presented [4]. The studies declare that human perception was the mainly affected by frequencies in the range of [0,40Hz]. The aerodynamics of automotive is the main origin of vibrations higher than 20Hz. Frequencies lower than 20Hz are generally attributed to the vehicle body vibration [5, 6]. The control system ought to react to all frequencies in the range [0-120Hz] with particular importance on the resonant modes. Traditional control technique which is simple and stable could just works at a very low speed effectively [7]. In active control, new techniques such as fuzzy, neural network and adaptive controls are established to enhance the robustness and accuracy of controllers. One of the novel methods in control is active force control (AFC) which is focused by researchers, which is discussed subsequent, because of its high efficiency, rationally simplicity, and accuracy. A whole package of the AFC system was recommended by Hewit and Burdess to control a robot manipulator [8]. AFC has been suggested to be effective in remove noises and disturbances for physical systems. The AFC method was initially utilized for vibration control by Hewit et al. to control a flexible robot arm motion [9]. Furthermore, the AFC integrated with conventional controller was employed in active suspension systems of vehicles [10, 11]. Besides, it has been employed to roll vibration attenuating of a spray boom [12-15]. Additionally, AFC was applied in trajectory control of mobile robot [16]. The consequences of these studies performed the AFC technique is more successful in rejecting disturbances of undesired oscillation of the systems. The outcomes of these investigation declared that the AFC approach is more efficient in suppression the magnitude of unwanted vibrations of the system. as the most vital computational unit in AFC is the estimate of the estimated mass or moment of inertia of system dynamics, the employ of artificial intelligence (AI) technique for instance artificial neural network (ANN) and iterative learning (IL) to find out this parameter has been commenced by Mailah [7]. Next, other types of AI method entrenched into the AFC method has been suggested such as fuzzy logic (FL) [17, 18, 9], neural network [19, 10, 20], and iterative learning [21-23] techniques had been extensively utilized by investigators.As implied, vibration reduction in side car mirror is so crucial, and disturbance rejection is main function of controller. Due to this issue, current paper tries to enhance performance of active mirror vibration control system (AMVS) by employing active force control (AFC). To approximate estimated mass inertia, two schemes were evaluated: artificial neural network (NN) and iterative learning (IL). The possibility of vibration suppression by these two techniques was evaluated by simulations.
2. Methodology
- First of all, dynamic modeling of AMVS is discussed in this part. Then, the designed PID controller was hybridized to AFC scheme. Approximation of estimated mass inertia is done by NN and IL. The performance of AMVS integrated by AFC will be simulated by Simulink/MATLAB and will be compared together.
2.1. Side Car Mirror Suspension Model
- Though road roughness and wind typically leads to vibration in the side car mirror, canceling these unwanted vibrations is vital to increase driver vision accuracy on the reflected image. The major advantage of performing active suspension method is the potential of the system in which the suspension parameters can be adaptively adjusted through the action.As roll vibration is major type of generated vibration in side car mirror [24], control system was designed to attenuate that. The mirror jam used in this research is considered as rigid plate pivoted to a mirror frame and a solenoid with metal core is engaged as the actuator. A schematic illustration of the mirror suspension system is exemplified in Fig. 1.
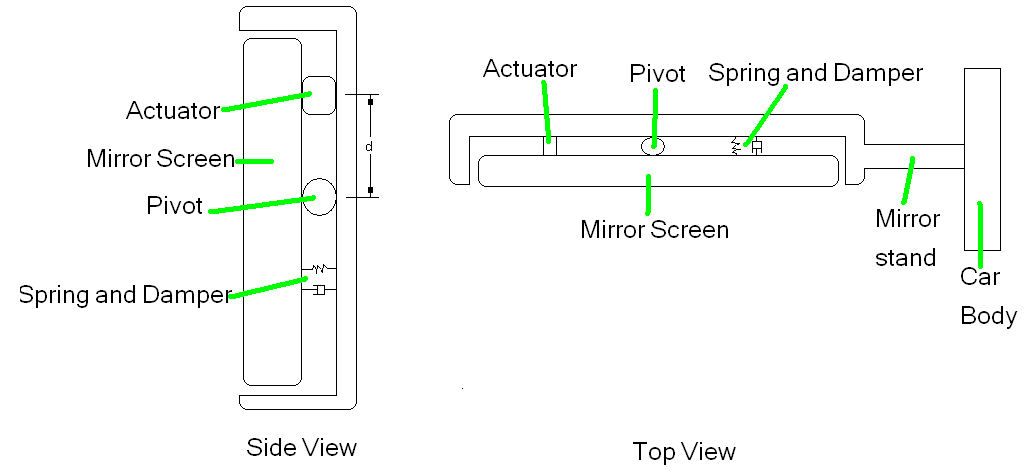 | Figure 1. A schematic diagram of Side Car Mirror Vibration |
 | (1a) |
 : Actuated torque
: Actuated torque : Mirror screen angle
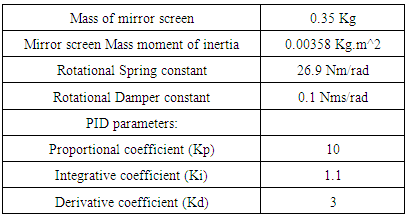
: Mirror screen angle : Mirror screen angular accelerationH: Inertia matrix of systemh: Centripetal and Coriolis torque vectorG: Gravitational torque vector
: Mirror screen angular accelerationH: Inertia matrix of systemh: Centripetal and Coriolis torque vectorG: Gravitational torque vector  : External disturbanceThe mirror frame is excited to different internal and external disturbances which some of them comes from road profile and engine vibration trough working and some of them generated by wind. So, the simplified Equation 1a can be stated as bellow:
: External disturbanceThe mirror frame is excited to different internal and external disturbances which some of them comes from road profile and engine vibration trough working and some of them generated by wind. So, the simplified Equation 1a can be stated as bellow: | (1b) |
2.2. Active Force Control
- Hewit and Burdess firstly presented the AFC which established on Newton’s second law of movement [8]. In this control strategy, the actuated force/torque is measured by sensor or other techniques. Also, the desired torque/force calculated from acceleration of output by multiplying to estimated mass/inertia. The difference between these two torques/forces is delivered to the actuator to compensate. Thus, enough torque/force is generated by actuator which adjusted by controller. In fact, this difference is estimated disturbance which it should be compensated and can be mentioned as bellow:
 | (2) |
 | (3) |
 | (4) |
 | (5) |
 | (6) |
 | (7) |
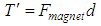
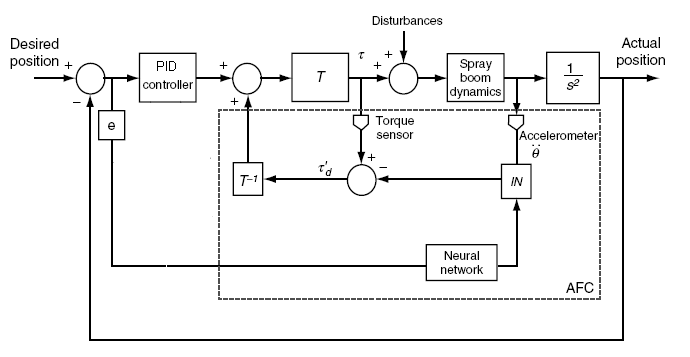
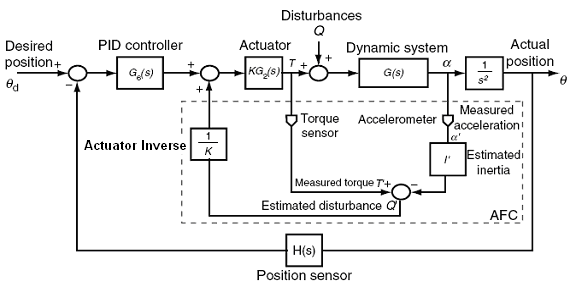 | Figure 2. The block diagram of applied AFC to AMVS |
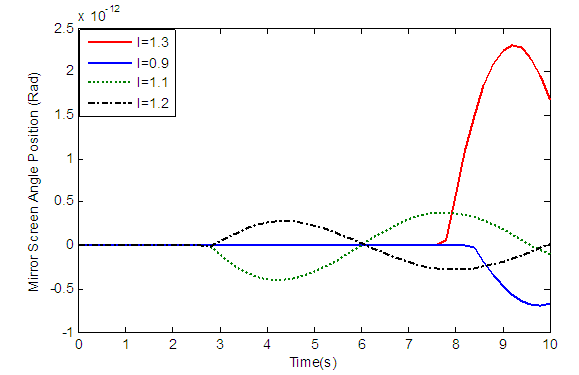 | Figure 3. Performance of AVSM in reducing mirror screen motion for different values of mass moment of inertia |
2.3. AFC-NN Developed Technique for AMVS
- The earlier studies on the theory of artificial neural network (ANN) initiated in the 1980’s [28-31]. A classic ANN multilayer feed forward topology includes of a number of neurons as input, hidden and output layers. They are interconnected through weights updated as the training process. Threshold or activation functions are typically non-linear functions which are applied at the output. The mainly ordinary equation that expressed the input/output relationship of a neuron is as bellows:
 | (8) |
 | (9) |
 | (10) |
 | (11) |
 | Figure 4. Schematic diagram of AFC-NN |
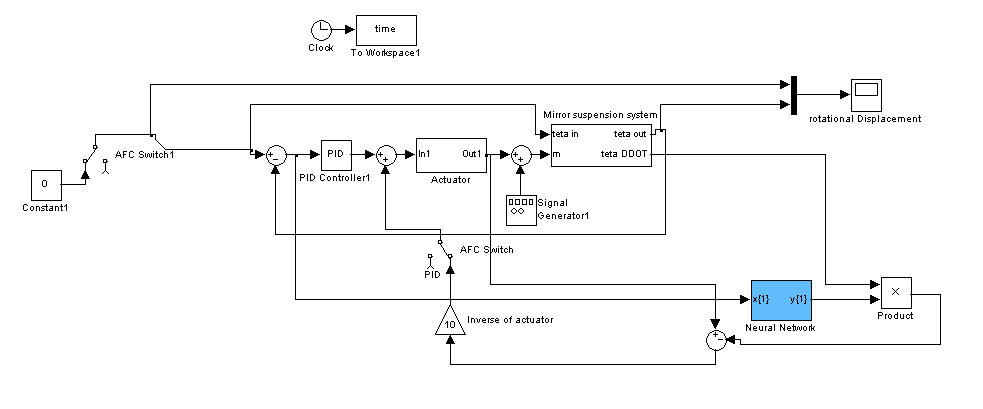 | Figure 5. The simulated AFC-NN by MATLAB/Simulink Software |
|
2.4. Iterative Learning Scheme
- The iterative learning algorithm (ILA) is an intelligent approach during the performance of a dynamical system be enhanced and enhanced as time increases based on minimizing the error. The fundamental concept of the ILA was first time established by Uchiyama [34]. Later on, Arimoto et al. afford an adequately analysis of the convergence, stability and robustness of the ILA [35 and 36]. Fig.6 shows a schematic of the proportional-Integral-Derivative type (PID-type) of ILA.
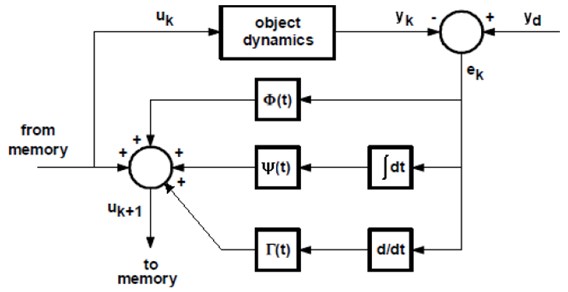 | Figure 6. Schematic diagram of the PID-type of ILA |
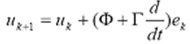 | (12) |
 | (13) |
 | (14) |
 is proportional learning parameter,
is proportional learning parameter,  and
and  are derivative and integral learning parameters, respectively. Fig.7 shows the PID-IL applied in AFC. The coefficients of ILA “
are derivative and integral learning parameters, respectively. Fig.7 shows the PID-IL applied in AFC. The coefficients of ILA “ ,
,  , and
, and  ” were tuned as 0.0001 by Heuristic method.
” were tuned as 0.0001 by Heuristic method.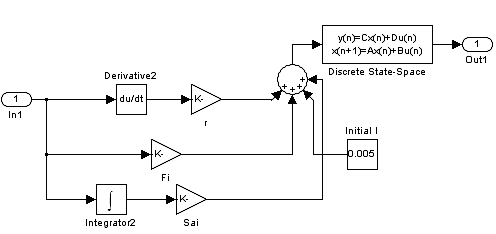 | Figure 7. Applied PID-IL in AFC |
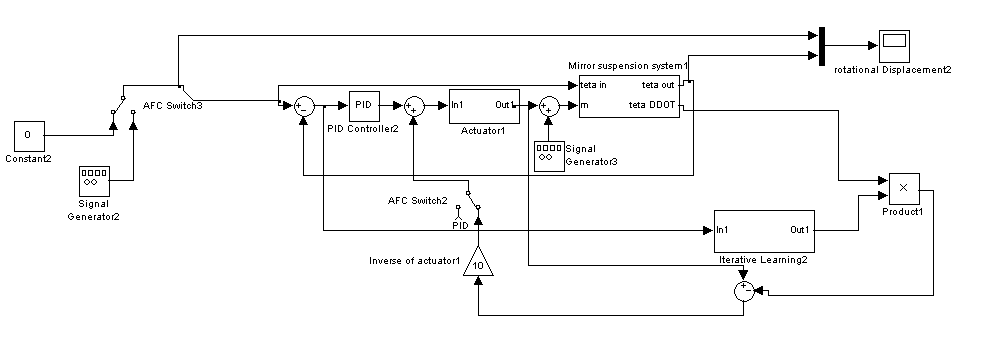 | Figure 8. The simulated AFC-IL for AMVS |
3. Result and Discussion
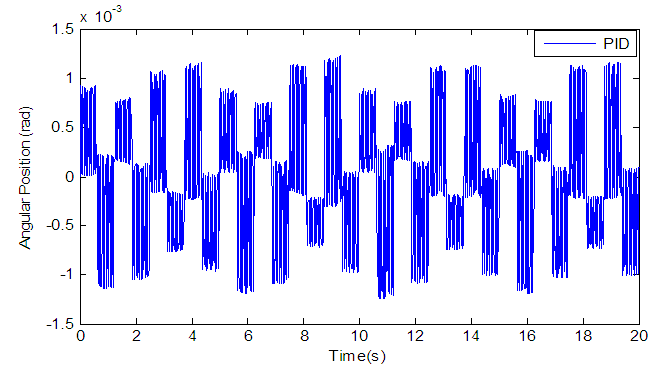
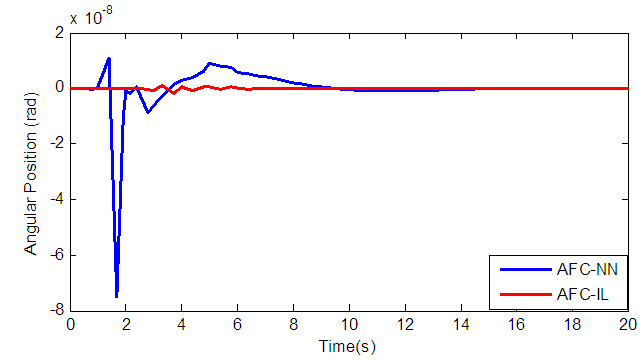
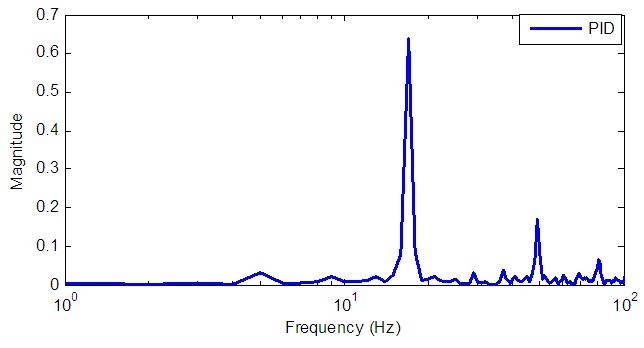
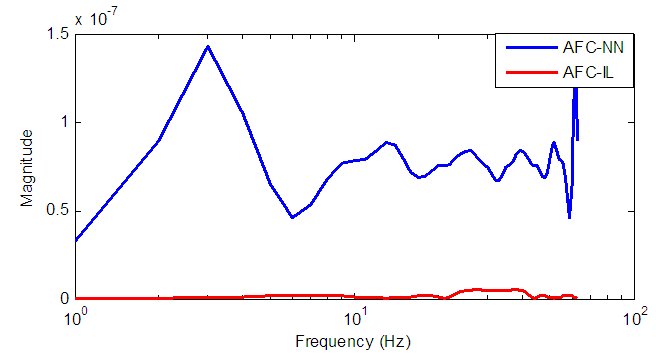
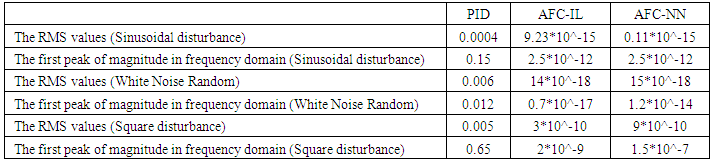
- Fig.9 illustrates the time responses of mirror angular position for conventional PID, AFC-NN, and AFC-IL strategies when exposed to disturbance which is described before. The results unveil that the performance of PID is not good as much as AFC-IL and AFC-NN. Also, the response of PID is not stable compared to AFC-IL and AFC-NN. It means that potential of PID in canceling of vibration is very lower than other intelligent AFC schemes. In addition, AFC-NN variation is lower than AFC-IL which is obvious in shown close up view of Fig. 9. The root means square values (RMS) were computed to measure closeness of responses to desired value. The RMS values were reached as 9.23*10^-15, 0.11*10^-15, and 0.0004 for AFC-IL, AFC-NN, and PID, respectively. Furthermore, the responses of three schemes were obtained in frequency domain by Fast Fourier Transformation (FFT) which is depicted in Fig.10 and 11. As can be seen in Fig. 10, the peaks of magnitude of PID acquired around 0.15 while in AFC-IL and AFC-NN are around 2.5*10^-12. Although first peak of AFC-NN and AFC-IL are same, between 10 to 100 Hz, the magnitudes of NN are lower than IL.Also, the responses of controllers were reached when square disturbance applied. As can be seen in Fig.12, PID controller can not attenuate the vibration as well as AFC-NN and AFC-IL which exemplified in Fig.13. The comparison between PID, AFC-NN and AFC-IL in frequency domain were shown in Fig.14 and Fig.15. The peaks of magnitude of PID attained around 0.65 while in AFC-IL and AFC-NN are around 2*10^-9 and1.5*10^-7, respectively.In addition to previous disturbances, system was subjected to White Noise Random, and results of various schemes were unveiled in Fig.16 and Fig.17, in time and frequency domain, respectively. Again, in both domains, AFC-NN and AFC-IL show better performance compared to PID controller. Subsequently, for better comparison, the results of AFC-IL and AFC-NN were demonstrated separately in Fig.18 and Fig.19, respectively.
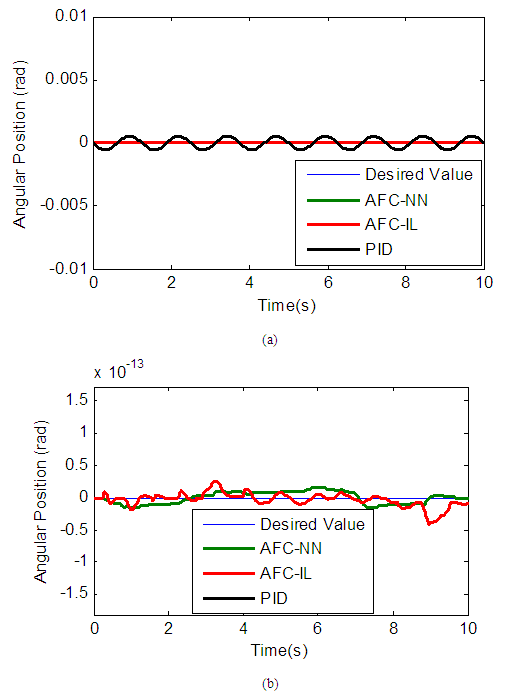 | Figure 9. (a) The time response of all the control schemes with Sinusoidal disturbance, (b) the close up view of responses |
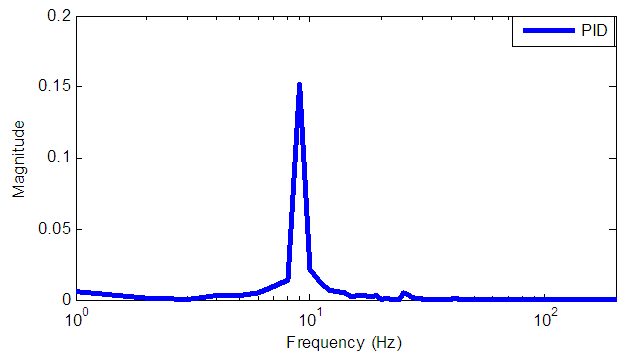 | Figure 10. The frequency domain response of PID controller subjected to sinusoidal disturbances |
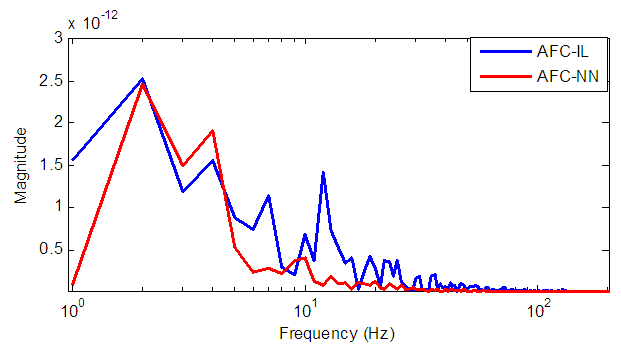 | Figure 11. The frequency domain response of AFC-IL and AFC-NN schemes subjected to sinusoidal |
 | Figure 12. The time domain response of PID controller subjected to square disturbances |
 | Figure 13. The frequency domain response of AFC-IL and AFC-NN controllers subjected to square disturbances |
 | Figure 14. The frequency domain response of PID controller subjected to square disturbances |
 | Figure 15. The frequency domain response of AFC-IL and AFC-NN schemes subjected to square disturbance |
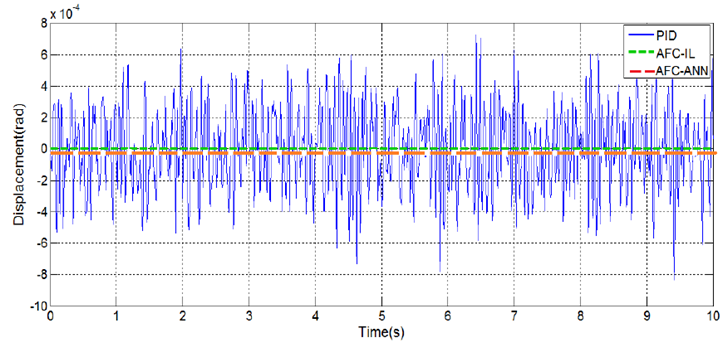 | Figure 16. The time response of all the control schemes with White Noise Random |
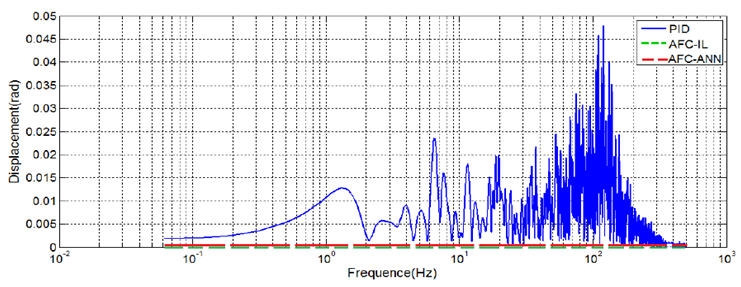 | Figure 17. The frequency domain response of PID, AFC-IL and AFC-NN schemes subjected to White Noise Random |
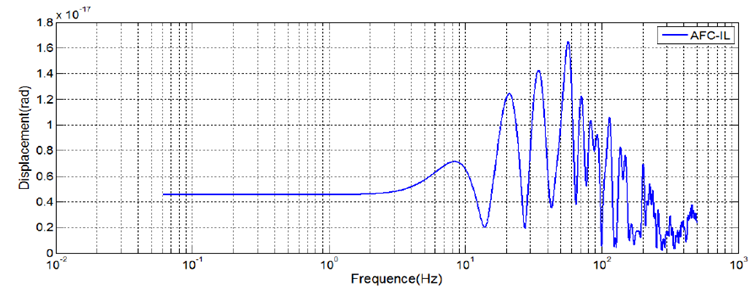 | Figure 18. The frequency domain response of AFC-IL scheme subjected to White Noise Random |
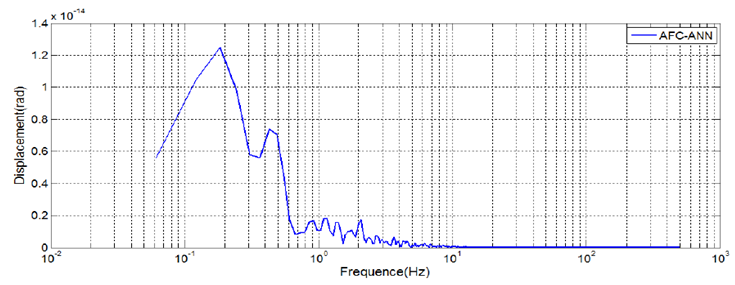 | Figure 19. The frequency domain response of AFC-NN scheme subjected to White Noise Random |
|
4. Conclusions
- A new controller occupied the active force control for vibration control of vehicle side mirror. This AFC were hybridized to artificial neural network and iterative learning algorithm called AFC-NN and AFC-IL, respectively. The designed controllers were simulated for the suppression of a roll motion of a side car mirror suspension system. The AFC-based scheme is found to be simple in terms of computation and make it proper for real time usage. Also AFC is efficient and create robust and accurate still in the attendance of diverse disturbances. Besides, the simulation results demonstrate that for known parameters and situations, the proposed AFC-NN and AFC-IL schemes performances improved compared to the conventional PID controller. Additionally, AFC-IL in comparison to AFC-NN shows better response in frequency domain and time domain. The results as well express that the AFC-based strategy as intelligent control method is able to reject the disturbances efficiently for the side car mirror suspension. However, supplementary trail should be conducted to investigate the effects of other forms of disturbances, uncertainties and parametric changes in real condition such as road tests. A continuing research through the development of a full working test rig equipped to the proposed control strategy is in progress to practically assess and evaluate the simulation findings related to the parameters of concern.