Tahere Pourseif 1, Majid Taheri Andani 2, Zahra Ramezani 3, Mahdi Pourgholi 1
1Department of Electrical Engineering, Abbaspour School of Eng., Shahid Beheshti University, Tehran, Iran
2Center for Mechatronics and Automation, College of Engineering, University of Tehran, Tehran, Iran
3School of Electrical Engineering Department, Iran University of Science and Technology, Tehran, Iran
Correspondence to: Majid Taheri Andani , Center for Mechatronics and Automation, College of Engineering, University of Tehran, Tehran, Iran.
| Email: |  |
Copyright © 2017 Scientific & Academic Publishing. All Rights Reserved.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

Abstract
In this paper, robots tracking problem with the known and unknown parameters in the presence of torque disturbances are addressed. For addressing this challenge, a controller is designed for tracking the desired path of the robot’s angle. With applying an adaptive controller Jacobian matrix is estimated and updated. Therefore, the tracking error will be reduced and converges to the reference model. The simulation results show the effectiveness of the proposed methods.
Keywords:
Model reference, Adaptive control, Robot, Jacobian matrix, Torque disturbance, Unknown parameter, Known parameter
Cite this paper: Tahere Pourseif , Majid Taheri Andani , Zahra Ramezani , Mahdi Pourgholi , Model Reference Adaptive Control for Robot Tracking Problem: Design & Performance Analysis, International Journal of Control Science and Engineering, Vol. 7 No. 1, 2017, pp. 18-23. doi: 10.5923/j.control.20170701.03.
1. Introduction
Todays, needs of industries to high precision design, implementation of robots with accurate programming ability, minimum time delay and robust stability of robots are increased [1, 2]. In industries, fixed robots are widely used. The fixed robots can be used in many purposes such as the assembly, painting, welding, and placement of components on the printed circuit board and pieces. Because of the importance of the first and the last track of these types of robots, the point to point control method is very applicable in this regard [3, 4, 19].Various methods are used for controlling the motion of robot's arm and achieve to the minimum tracking error. One type of these controllers is model reference adaptive control (MRAC). In this type of control approach, the feedback controller and an auxiliary signal are used to enhance the stability of the closed loop system and reach to optimal path [5, 6].Although, this method has advantages such as is not difficult for implementing of complex nonlinear systems and, it has quick adaption respect to the unknown disturbances, the adaptation has practical difficulties and path tracking is associated with an error. In order to solve this problem, the robust adaptive controller is employed. In this scheme, by considering the uncertainty due to the linearization of equations and existence of disturbances on the body of the robot, the robot's arm motion action takes place, and the best route will be accessed by minimum error [7, 8]. In this condition, obtaining a Lyapunov function and considering parameters uncertainty for stability analysis of system is difficult. Therefore, PID controller is proposed to increase its stability and compensate steady state error [10, 11]. In this condition, the disturbances of system will be strengthened, and will be caused to be weakened in the path tracking. For solving this problem, in [9], a fuzzy PID controller is proposed. In this method, PID parameters are supervised by fuzzy logic, but disturbance rejection in this controller is difficult.In the previous studies on this kind of robots, the external and internal disturbances on the robot with known variables was considered and based on this fact and using different controllers such as adaptive control, the position of robot's angle was controlled [12].In this paper, an exogenous disturbance in the robot and its influence on 2 degrees freedom robot performance with both unknown dynamic parameters and kinetic will be presented. To the best of authors knowledge not much attempt have been made on this problem. Considering these conditions, a model reference adaptive control is introduced.The rest of the paper is organized as follows: the dynamic equation of two degrees of freedom with known parameters is given in the section 2. The dynamic and kinetic equations of the robot with unknown parameters and estimates expressed Jacobian to obtain the unknown parameters in section 3, and adaptive control is designed. A comparative simulation study of robot with known and unknown robot is demonstrated in section 4 to show the effectiveness of the proposed algorithm. Finally, the conclusions are given in section 5.
2. Robot Dynamic Equation
The dynamic equation of a 2-link robotic manipulator are described as [13]: | (1) |
where  is the inertial matrix, and it is symmetric and positive definite.
is the inertial matrix, and it is symmetric and positive definite.  is a vector of joint position;
is a vector of joint position;  shows the effect of torsion and centrifugal force that is symmetric and positive definite matrix.
shows the effect of torsion and centrifugal force that is symmetric and positive definite matrix.  represents the gravity force which it is assumed is equal to
represents the gravity force which it is assumed is equal to  represents the torque input vectors of each joint that in this paper, it is considered as a control input.The equations of the robot with two degrees of freedom can be rewritten as the following form [12]:
represents the torque input vectors of each joint that in this paper, it is considered as a control input.The equations of the robot with two degrees of freedom can be rewritten as the following form [12]:  | (2) |
The torque input is defined as | (3) |
In the above equation, matrix  represents a dynamic regression matrix, and
represents a dynamic regression matrix, and  is
is  , and it shows the dynamic parameters of robot. According to equation (2) the equation of system can be considered in the following form:
, and it shows the dynamic parameters of robot. According to equation (2) the equation of system can be considered in the following form: | (4) |
The desired path for the robot's joint has been found in the workplace. This path can be in the projective space or Cartesian coordinates form. If  is a vector in workspace,
is a vector in workspace,  will be the speed vector in workspace. If the camera is used to monitor the position of the joint, workspace will be visual and in terms of pixels, and if the sensor is used to monitor the position, the workspace will be based on the Cartesian coordinates.
will be the speed vector in workspace. If the camera is used to monitor the position of the joint, workspace will be visual and in terms of pixels, and if the sensor is used to monitor the position, the workspace will be based on the Cartesian coordinates. | (5) |
Therefore, to calculate the  vector can be used from the following equation:
vector can be used from the following equation:  | (6) |
The Initial modeling of robot can be done in several ways that in the all procedures should be expressed link between joint space and work space. This relation is established by the Jacobins matrix, thus the dynamic, kinematic and the stimulus of system and the robot is concerned. Based on the previous description, the equation (6) can be rewritten in the following form [14]: | (7) |
In the above equation,  represents the Jacobian matrix that is full order, and it is [15]:
represents the Jacobian matrix that is full order, and it is [15]: | (8) |
After the description of robot equations, in the next section, the controller will be designed. Adaptive control can be divided into two methods: direct and indirect which in this paper, both methods are analyzed [13, 16].
3. Influence of Disturbance on a Robot
In this section, the impact of disturbance on a 2 degree of freedom robot is addressed. In the most previous researches like [6-13, 15] the robot gripper tracks the desired trajectory in normal condition without any internal or external disturbances, and design and evaluate the stability of the robot controller in the presence of disturbance is not considered. Motivating by above discussion, in this paper, robots with unknown parameters in the presence of disturbance is considered and the input torque is affected by an exogenous disturbance. Figure 1 shows the block diagram of reference model adaptive control with torque disturbance.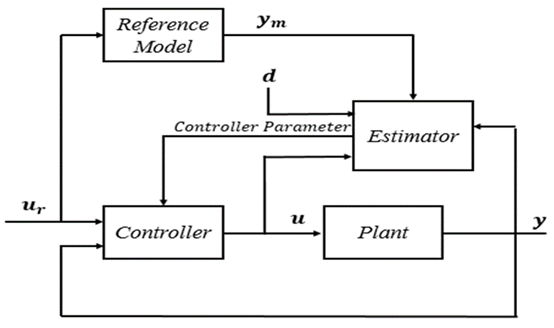 | Figure 1. Block diagram of model reference adaptive control with an exogenous disturbance |
The dynamic equation of robot in presence of disturbance is defined as: | (9) |
Where  is torque disturbance in the robot. In order to modelling this disturbance, an input pulse with value of
is torque disturbance in the robot. In order to modelling this disturbance, an input pulse with value of  and width equal to 0.4 second sis considered. This disturbance is exposed to the body of robot from torque input.The parameters of the Jacobian matrix is uncertain, the following dynamic approximator model is used:
and width equal to 0.4 second sis considered. This disturbance is exposed to the body of robot from torque input.The parameters of the Jacobian matrix is uncertain, the following dynamic approximator model is used: | (10) |
 is an approximate Jacobian matrix and is [13]:
is an approximate Jacobian matrix and is [13]: | (11) |
The model of equation (12) can be rewritten in the following form [17]: | (12) |
To avoid the need for measuring task-space velocity in adaptive Jacobian tracking control, we introduce a known signal y: | (13) |
where, λ is known, and the signal y can be computed by measuring x alone, and by using (7) and (13) we have | (14) |
where  is the Laplace operator, and
is the Laplace operator, and  is defined as follows:
is defined as follows: | (15) |
The algorithm we shall now derive is composed of a control law: | (16) |
 | (17) |
 | (18) |
 | (19) |
where  is inverse of Jacobian matrix,
is inverse of Jacobian matrix,  is positive definite function. Parameter
is positive definite function. Parameter  is real vector that is approximated by examination model, and
is real vector that is approximated by examination model, and  is desired path. In above equation,
is desired path. In above equation,  is error of tracking, and is
is error of tracking, and is  In order to calculate
In order to calculate  in equation (18), two adaption laws are used. By using these laws, the dynamic and kinetic parameters of robot can be estimated [15].
in equation (18), two adaption laws are used. By using these laws, the dynamic and kinetic parameters of robot can be estimated [15]. | (20) |
and  is:
is: | (21) |
Adaption laws for kinetic parameters is: | (22) |
the overall model of robot using adaption laws obtained as: | (23) |
 | (24) |
We define the following Lyapunov function candidate in order to analyze the stability [18]: | (25) |
Theorem: Closed-loop system stability for system 1 ensured if  or
or  in (16) and adaption law parameters in (22) are equal to zero.Proof:By derivative of equation (23), we have:
in (16) and adaption law parameters in (22) are equal to zero.Proof:By derivative of equation (23), we have:  | (26) |
 | (27) |
Based on equations (17) and (18), and Lemma,  In addition, we know
In addition, we know  The Lyapunov function is negative. M(q) based on equation (1), is defined as a positive definite matrix. If
The Lyapunov function is negative. M(q) based on equation (1), is defined as a positive definite matrix. If  and
and  have limited value, therefore, value of V will be limit too. In order to evaluate the limitation of
have limited value, therefore, value of V will be limit too. In order to evaluate the limitation of  Barbalat Lemma is used. Because M(q) is positive definite and V is based on
Barbalat Lemma is used. Because M(q) is positive definite and V is based on  and
and  therefore V is positive definite. In addition,
therefore V is positive definite. In addition,  therefore, V is bounded and
therefore, V is bounded and 
 will be bounded. This condition that cause
will be bounded. This condition that cause  and
and  will be bounded. Also, if
will be bounded. Also, if  is bounded,
is bounded,  will be bounded, and
will be bounded, and  will be bounded too. Therefore, we conclude if
will be bounded too. Therefore, we conclude if  is bounded too. Because
is bounded too. Because  is bounded therefore, if
is bounded therefore, if  is bounded, and approximated Inverse of Jacobian matrix has limitation therefore, the bounded of
is bounded, and approximated Inverse of Jacobian matrix has limitation therefore, the bounded of  will be concluded, because Jacobian Matrix has limited value. Remark 1: The above method not only can be used for system with unknown parameters, but also, it can be used for the systems with some known parameters too.Remark 2: P which is a positive definite matrix, by using adaption law will be added to the equations:
will be concluded, because Jacobian Matrix has limited value. Remark 1: The above method not only can be used for system with unknown parameters, but also, it can be used for the systems with some known parameters too.Remark 2: P which is a positive definite matrix, by using adaption law will be added to the equations: | (28) |
 | (29) |
In this step, after approximation of unknown robot parameters by using Jacobian Matrix, reference model based indirect adaptive control will be designed, and controller parameters of  is updated based on accessed variables.
is updated based on accessed variables.
4. Simulation Results
In this section in order to show the effectiveness of our proposed controllers, simulation results on robot in presence of disturbance is shown. Figure 2 shows the step response of robot with known and unknown parameters without disturbance using the adaptive controller.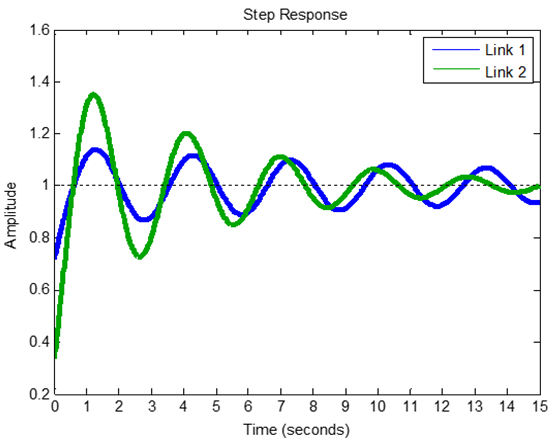 | Figure 2. The transient response of robot angle with MRAC without disturbance: a) robot with known dynamic and kinetic parameters, b) robot with unknown dynamic and kinetic parameters |
Figure 2(a), shows that, the system has some overshoot but after passing sometimes the settling time of link 1 is equal to 13.7 and the settling time of link 2 is equal to 12.4 and this overshot is reduced. In addition, without disturbance, the system has a steady state error and could not converge to the desired paths.Figure 2 (b) shows with approximation of unknown robot parameters, the response has overshoot but after passing sometimes the settling time of link 1 is equal to 6.54 and the settling time of link 2 is equal to 5.2 and they could track desired path as well, although we have a little steady state error.Figure 3 (a) shows the path of angle of robot with known dynamic and kinetic parameters. It is shown we have steady state error. The path of robot with unknown parameters is shown in figure 3(b), that the transient error is existed but it could track with very little error well. 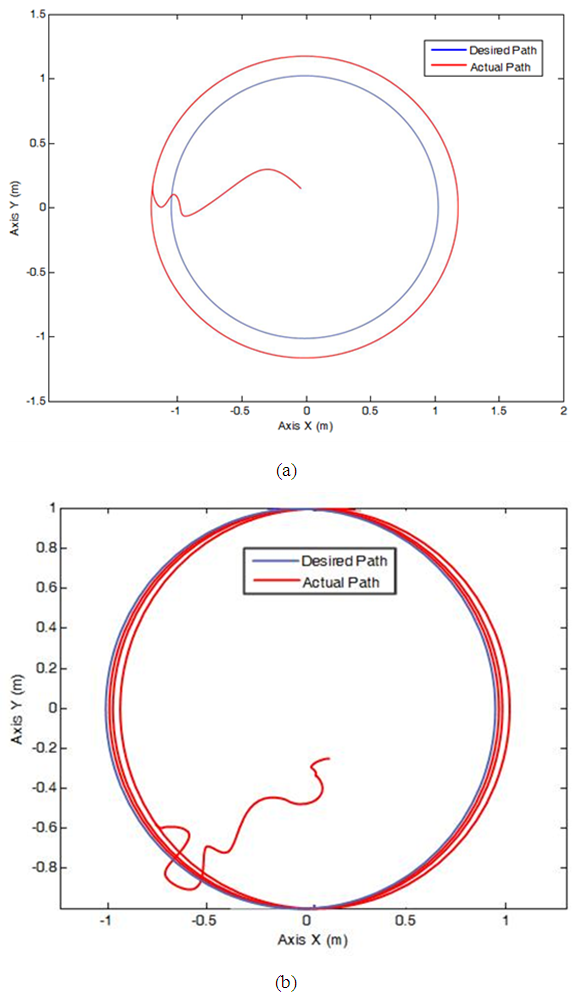 | Figure 3. The path of robot angle with MRAC without disturbance: a) robot with known dynamic and kinetic parameters, b) robot with unknown dynamic and kinetic parameters |
Usually, the internal and external disturbances are existed on system that influence on performance of robot and it is caused the changing in robot path.In the following, the performance of robot in presence of disturbance will be considered. The disturbance in this paper is the torque disturbance and it is considered a pulse that exposed on system at 7 second.Figure 4 shows the simulation results of controlling robot with known and unknown parameters in the presence of disturbance. 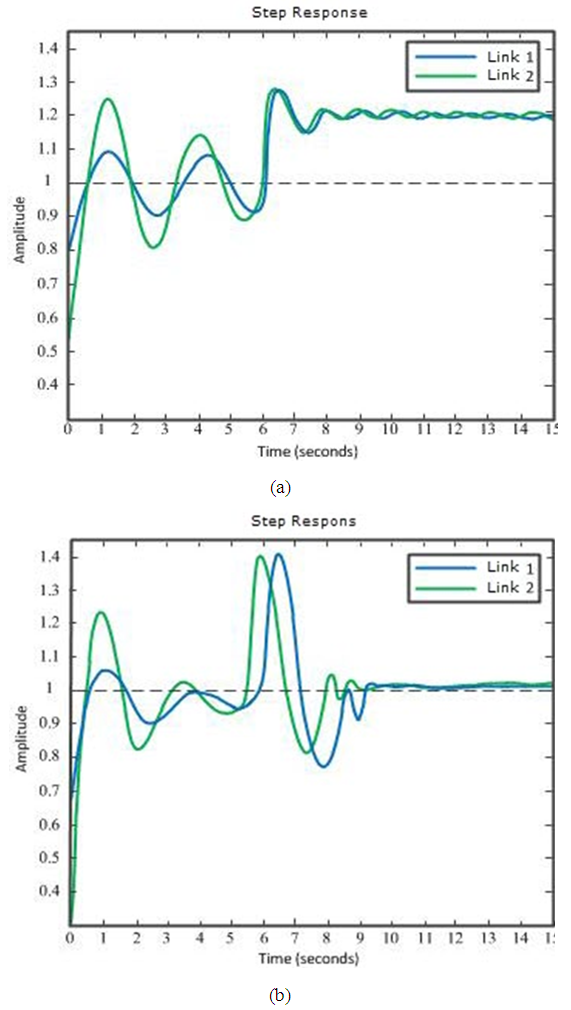 | Figure 4. The transient response of robot angle with MRAC with disturbance: a) robot with known dynamic and kinetic parameters, b) robot with unknown dynamic and kinetic parameters |
The effect of disturbance on robot with known equation is shown in figure 4 (a). It is shown after exposing disturbance in system, we have overshoot on 7 second, but the control is tried to reduce this overshoot, but it could not reject disturbance well. Comparing simulation results of system with disturbance and without disturbance shows that the steady state error in system with disturbance is more than system without disturbance.Figure 4 (b) shows the response of robot with unknown parameters with disturbance. The rejection of disturbance in this system is done well. The design controller to disturbance rejection for robot with unknown parameters is better.Figures 5 (a) demonstrates the tracking of desired path. We can see after exposing disturbance, the rejection of it is not well, and control cannot reject disturbance very well. But, figure 5 (b) shows the rejection of disturbance and tracking for robot with unknown parameters are well. 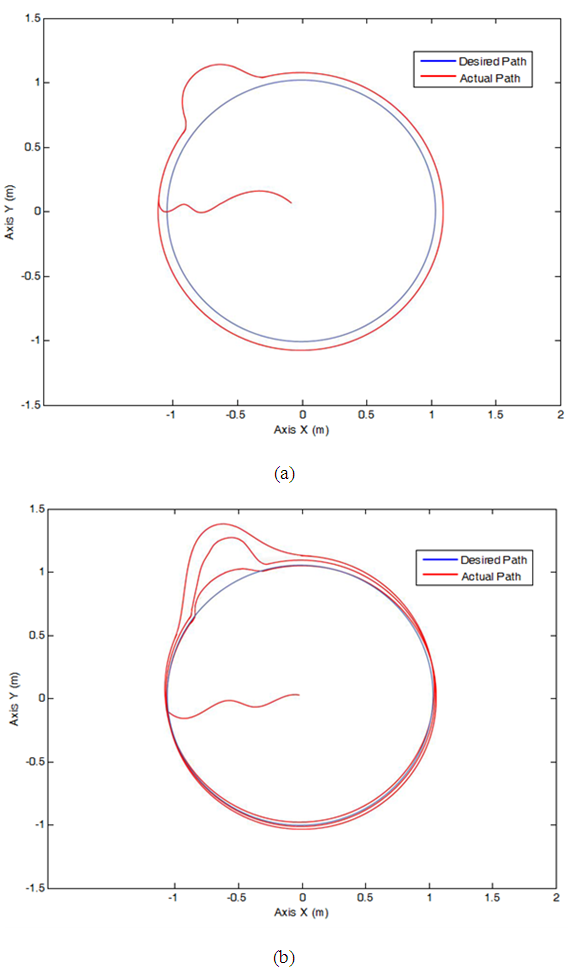 | Figure 5. The path of robot angle with MRAC with disturbance: a) robot with known dynamic and kinetic parameters, b) robot with unknown dynamic and kinetic parameters |
In order to compare the performance robot with known and unknown parameters with and without disturbance, sum mean value square error criterion is used.The table 1, shows the comparison transient response between with known and unknown parameters with and without disturbance and the table 2, demonstrates these comparisons for path response. Table 1. The mean value square criterion with MRAC with disturbance for control of transient response of robot
 |
| |
|
Table 2. The mean value square criterion with MRAC with disturbance for control of path of robot
 |
| |
|
Based on the above tables, we can conclude robot with known parameters has steady state error.But robot with unknown parameters because of increasing unknown parameters can reduce the error and converge to desired path.
5. Conclusions
In this paper, designing the reference model based adaptive control for robot with two degrees of freedom is considered. In addition, the performance of robot with known and unknown dynamic and kinetics parameters in presence of disturbance is analyzed too. The simulation results and square mean value criterion show that robot with unknown parameters without disturbance, because has more freedom in examination of unknown parameters, has better tacking, and little steady state tracking error. By considering the disturbances in robot with known parameters the proposed method could not reject the disturbance very well, and has more error compared to track the desired path without disturbance. Moreover, when the parameters of robot are unknown in presence of disturbance, the disturbance rejection and tracking is also well.
References
| [1] | B. Kehoe, S. Patil, P. Abbeel and K. Goldberg, “A Survey of Research on Cloud Robotics and Automation”, IEEE Transactions on Automation Science and Engineering, vol. 12, No. 2, pp. 398- 409, (2015). |
| [2] | M. Galicki,” Finite- Time Trajectory Tracking Control in a Task Space of Robotic Manipulator” International Journal of automatic, Vol. 67, pp. 165.170, (2016). |
| [3] | M. Mirzadeh, Gh. Ahrami, M. haghighi and A. Darveshi, “Intelligent Model- Reference Method to Control of Industrial Robot Arm”, International Journal of u- and e- Service, Science and Technology, Vol. 8, No. 2, pp. 71- 90, (2015). |
| [4] | P. Y. Huang, “Study of Optimal Path Planning and motion Control of a Delta Robot Manipulator”, IEEE Transactions on Industrial Electronics, Vol. 49, No.1, pp. 224- 232, (2015). |
| [5] | X. Wang and J. Zhao, “Switched adaptive Tracking Control of Robot Manipulators with Friction and Changing Loads”, International Journal of Systems Science, Vol. 46, No. 6, pp. 955- 965, (2015). |
| [6] | D. Zhao, Sh. Li and Q. Zhu, “Adaptive Synchronised Tracking Control for Multiple Robotic Manipulators with Uncertain Kinematics and Dynamics”, International Journal of Systems Science, Vol. 47, No. 4, pp. 791- 804, (2016). |
| [7] | M. R. Soltanpour and S. E. Shafiei, “Robust Adaptive Control of Manipulators in the Task Space By Dynamical Patitioning Approach”, Internationa Journal of Electronika Ir Electrotechnika, Vol. 101, No.5 , pp. 73-78, (2010). |
| [8] | M. Rahmani, A. Ghanbari and M. M. Ettefagh, “Robust Adaptive Control of bio- Inspired Rbot Manipulator Using Bat Algorithm”, International Journal of Expert Systems with Applications, Vol. 56, pp. 164- 176, (2016). |
| [9] | R. H. Mohammed, F. Bendary and K. Elserafi, “Trajectory Tracking Control for Robot Manipulator Using Fractional Order- Fuzzy- PID Controller”, International Journal of Computer Applications, Vol.134, No.15 pp. 22-30, (2016). |
| [10] | R. Sharma, P. Guar and A. P. Mittal, “Performance Analysis of Two- degree of Freedom Fractional Order PID Controllers for Robotics Manipulator with Payload”, International Journal of ISA Transactions, Vol. 58, pp. 279-291, (2015). |
| [11] | C. B. Kadu, S. B. Bhusal and S. B. Lukare, “Autotuning of the Controller for Robot Arm and Magnet Levitation Plant”, International Journal of Research in Engineering and Technology, Vol. 4, No.1, pp. 186-193, (2015). |
| [12] | H. T. Le, S. R. Lee and Gh. Y. Lee, “Integration Model Reference Adaptive Control and Exact Linearization with Disturbance Rejection for Control of Robot Manipulators”, International Journal of Innovative Computing, Information and Control, Vol.7, No.6, pp. 3255- 3267, (2011). |
| [13] | Ch. Ch. Cheah, M. Hirano, S. Kawamura and S. Arimoto, “Approximate Jacobian Control for Robots with Uncertain Kinematics and Dynamics”, IEEE Transaction on Robotics and Automation, Vol. 19, No.4, pp. 692- 702, (2003). |
| [14] | R. M. Murray, Z. Li and S. Sh. Sastry, “A Mathematical Introduction to Robotic Manipulation”, California, CRC Press, (1994). |
| [15] | H. Wang.” Take-space synchronization of networked robotic systems with uncertain kinematics and dynamics", IEEE Transactions on Automatic Control, Vol. 58, No. 12, pp. 3169-3174, (Dec. 2013). |
| [16] | J.-J. E. Slotine and W. Li, “On the adaptive control of robot manipulators,” The International Journal of Robotics Research, vol. 6, no. 3, pp. 49–59, (Sep. 1987). |
| [17] | H. Chae, An. Christopher, G. Atkeson and J. Hollerbach, “Model- Based Control of a Robot Manipulator”, Cambridge, MA. MIT Press, (1988). |
| [18] | K. S. Narendra and A. M. Annaswamy, “Stable Adaptive Systems,” Prentice-Hall, (2012). |
| [19] | Andani, Majid Taheri, and Zahra Ramezani. "Robust Control of a Spherical Mobile Robot." (2017). |

 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTML