-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
International Journal of Control Science and Engineering
p-ISSN: 2168-4952 e-ISSN: 2168-4960
2016; 6(1): 12-21
doi:10.5923/j.control.20160601.02

Fuzzy Observer Design for a Class of Discrete-Time Takagi-Sugeno Descriptor Systems
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLEl Mahfoud El Bouatmani, Abdellatif El Assoudi, Ilham Hmaiddouch, Jalal Soulami, El Hassane El Yaagoubi
ECPI, Department of Electrical Engineering, ENSEM, University Hassan II of Casablanca, Casablanca, Morocco
Correspondence to: Jalal Soulami, ECPI, Department of Electrical Engineering, ENSEM, University Hassan II of Casablanca, Casablanca, Morocco.
| Email: |  |
Copyright © 2016 Scientific & Academic Publishing. All Rights Reserved.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

This paper investigates the observer design problem of a class of discrete-time nonlinear descriptor systems described by Takagi-Sugeno (T-S) structure. Both measurable and unmeasurable premise variables cases are considered. The approach is based on the separation between dynamic and static relations in the T-S descriptor model. The convergence of the state estimation error is studied by using the Lyapunov theory and the stability conditions are given in terms of linear matrix inequalities (LMIs). Moreover, for reasons of ease of the implementation, the main result of this paper consists in showing that the state estimation problem for a class of considered descriptor systems can be achieved by using a fuzzy observer having only a recurrence structure. Finally, an application to a model of a heat exchanger pilot process is given to illustrate the proposed approach.
Keywords: Takagi-Sugeno Model, Discrete-Time Descriptor System, Fuzzy Observer, Linear Matrix Inequality (LMI)
Cite this paper: El Mahfoud El Bouatmani, Abdellatif El Assoudi, Ilham Hmaiddouch, Jalal Soulami, El Hassane El Yaagoubi, Fuzzy Observer Design for a Class of Discrete-Time Takagi-Sugeno Descriptor Systems, International Journal of Control Science and Engineering, Vol. 6 No. 1, 2016, pp. 12-21. doi: 10.5923/j.control.20160601.02.
Article Outline
1. Introduction
- It is well known that to apply state feedback control it is necessary to know all the states of the system. In real application, not all the states are available to be measured, thus the necessity to use an observer arises. In this paper, we are interested in the design of state observer of discrete-time nonlinear descriptor systems represented by T-S models. Recall that, the interest in using the approach based on the representation of the nonlinear systems by T-S models [1-3] relies on the fact that once the T-S fuzzy models are obtained, some analysis and design tools developed in the linear system theory can be used [4-6], which facilitates observer or/and controller synthesis for complex nonlinear systems.However, many works have been carried out to investigate the problem of the nonlinear observer synthesis and its application for dynamical systems described by T-S fuzzy models. More specifically, the T-S fuzzy observer problem for dynamic explicit models in the continuous-time and the discrete-time has been addressed in [3], [7-10]. In implicit cases, several works exist for continuous-time case [11-15] and for discrete-time one [16], [17]. Moreover, many other works dealing with observer design in explicit form called Proportional Integral Observer were also proposed for implicit T-S models. These results are based on the singular value decomposition approach and a generalized inverse matrix and consider the output matrix without nonlinear terms see for example [18], [19] and many references herein. Notice that, generally an interesting way to solve the various fuzzy observer problems raised previously is to write the convergence conditions on the LMI form [20].In this paper, we deal with nonlinear descriptor models. The dynamics of descriptor systems variously called singular systems or implicit systems are governed by a mixture of algebraic and differential (difference) equations. These models have been receiving a great deal of attention for many decades as a representation of dynamical systems [21-24]. This formulation includes both dynamic and static relations. In fact, this formalism is much more general than the usual one and can model physical constraints or impulsive behavior due to an improper part of the system. Recall that many physical systems are naturally modeled as descriptor systems such as chemical, electrical and mechanical engineering systems. The numerical simulation of implicit models usually combines a resolution routine of an ordinary equation together with an optimization algorithm.This work presents a new observer structure for a class of discrete-time T-S descriptor systems. Both measurable and unmeasurable premise variables cases are considered. The approach is based on the separation between difference and algebraic equations in the T-S descriptor model. The main contribution of this paper consists in showing that the observer design problem for a class of discrete-time T-S descriptor systems can be achieved by using a fuzzy observer without the use of an optimization algorithm. Using the Lyapunov theory, stability conditions are obtained and given in terms of LMIs.The rest of the paper is structured as follows. The class of the fuzzy T-S structure of the nonlinear implicit system is defined in the Section 2. The main results about fuzzy observer design for a class of discrete-time T-S descriptor systems are exposed in Section 3. The first result is devoted to the case of measurable premise variables and the second one concerns the unmeasurable premise variables. Finally, to reinforce the theoretical results, we present an application with simulation in Section 4.In this paper, some notations used are fairly standard. For example,
 means the matrix
means the matrix  is symmetric and positive definite.
is symmetric and positive definite.  denotes the transpose of
denotes the transpose of  . The symbol
. The symbol  (or 0) represents the identity matrix (or zero matrix) with appropriate dimension.
(or 0) represents the identity matrix (or zero matrix) with appropriate dimension. 
2. Discrete-Time T-S Descriptor Systems
- Let us consider the class of discrete-time nonlinear descriptor systems:
 | (1) |
 is the state vector,
is the state vector,  is the control input,
is the control input,  is the measured output. f, g and h are nonlinear functions.
is the measured output. f, g and h are nonlinear functions.  such that
such that  is a real known constant matrix with:
is a real known constant matrix with: | (2) |
 | (3) |
 is the state vector with
is the state vector with  is the vector of difference variables,
is the vector of difference variables,  is the vector of algebraic variables,
is the vector of algebraic variables,  ,
,  ,
,  are real known constant matrices assumed to be of the form:
are real known constant matrices assumed to be of the form: | (4) |
 are supposed invertible
are supposed invertible 
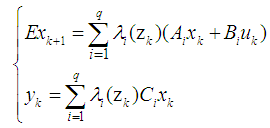
 is the number of sub-models.
is the number of sub-models.  is the vector containing the premise variables.The
is the vector containing the premise variables.The  are the weighting functions that ensure the transition between the contribution of each sub-model:
are the weighting functions that ensure the transition between the contribution of each sub-model: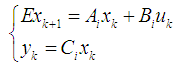 | (5) |
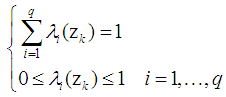 | (6) |
 do not depend on the state variables estimated by a fuzzy observer (measurable premise variables case).Case 2:
do not depend on the state variables estimated by a fuzzy observer (measurable premise variables case).Case 2:  depend on the state variables estimated by a fuzzy observer (unmeasurable premise variables case).For the rest of the paper we consider the Class of Discrete-Time Takagi-Sugeno Descriptor Systems (3).Then, before giving the main results, let us make the following assumption [24]:Assumption A1:
depend on the state variables estimated by a fuzzy observer (unmeasurable premise variables case).For the rest of the paper we consider the Class of Discrete-Time Takagi-Sugeno Descriptor Systems (3).Then, before giving the main results, let us make the following assumption [24]:Assumption A1:  is regular, i.e.
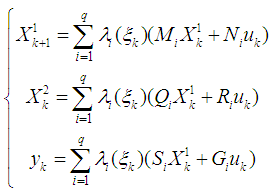
is regular, i.e.  Assumption A2: All sub-models (5) are impulse observable and detectable.In order to investigate the observer design for discrete-time T-S descriptor system (3), the approach is based on the separation between difference and algebraic equations in each sub-model (5) and the global fuzzy model is obtained by aggregation of the resulting sub-models.So, using (4), system (5) can be rewritten as follows:
Assumption A2: All sub-models (5) are impulse observable and detectable.In order to investigate the observer design for discrete-time T-S descriptor system (3), the approach is based on the separation between difference and algebraic equations in each sub-model (5) and the global fuzzy model is obtained by aggregation of the resulting sub-models.So, using (4), system (5) can be rewritten as follows: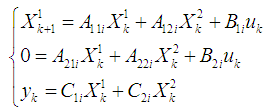 | (7) |
 exist, the algebraic equations can be solved directly for algebraic variables, to obtain:
exist, the algebraic equations can be solved directly for algebraic variables, to obtain: | (8) |
 (equation (8)) in equation (7) yields the following model:
(equation (8)) in equation (7) yields the following model: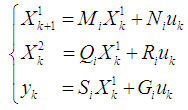 | (9) |
 | (10) |
 ,
,  can be rewritten as
can be rewritten as | (11) |
 .In descriptor form, subsystem (9) takes the following equivalent form of submodel (5):
.In descriptor form, subsystem (9) takes the following equivalent form of submodel (5): | (12) |
 | (13) |
 | (14) |
 | (15) |
3. Main Results
- In this section, the purpose is to suggest a new method for the observer design of discrete-time T-S descriptor model (3). Both measurable and unmeasurable premise variables cases are considered. The first result devoted to the case of measurable premise variables is exposed in subsection 3.1 and the second one which concerns the unmeasurable premise variables case is established in subsection 3.2.
3.1. Observer Design with Measurable Premise Variables
- Based on the transformation of the discrete-time T-S descriptor system (3) into the equivalent form (15), the proposed observer is given by the following equations:
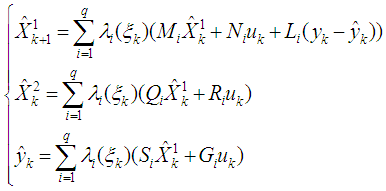 | (16) |
 and
and  denote the estimated state vector and output vector respectively. The activation functions
denote the estimated state vector and output vector respectively. The activation functions  are the same than those used in the T-S model (15). The local gain
are the same than those used in the T-S model (15). The local gain  can be determined by theorem 1.Denoting the state estimation error by:
can be determined by theorem 1.Denoting the state estimation error by: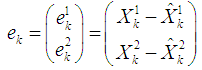 | (17) |
 is given by the following equations:
is given by the following equations: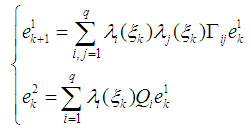 | (18) |
 | (19) |
 toward zero, it suffices to prove from (18), that
toward zero, it suffices to prove from (18), that  converges toward zero. Then, the following result can be stated.Theorem 1. Under the above assumptions, the state estimation error between the T-S descriptor model (3) and its observer (16) converges asymptotically towards zero, if there exist matrices
converges toward zero. Then, the following result can be stated.Theorem 1. Under the above assumptions, the state estimation error between the T-S descriptor model (3) and its observer (16) converges asymptotically towards zero, if there exist matrices  verifying the following LMIs:
verifying the following LMIs: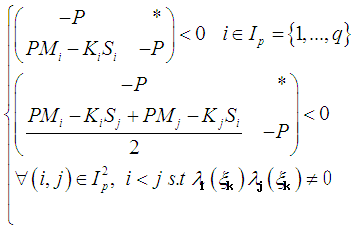 | (20) |
 | (21) |
 | (22) |
 | (23) |
 | (24) |
 is assured if:
is assured if: | (25) |
 | (26) |
 | (27) |
 | (28) |
3.2. Observer Design with Unmeasurable Premise Variables
- In this subsection, the aim is to extend the above observer design method presented in subsection 3.1 to a class of discrete-time T-S descriptor systems (3) when the premise variables are supposed depend on the unmeasurable state variables. In this case, the proposed fuzzy observer is described as:
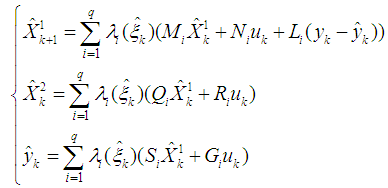 | (29) |
 ,
,  and
and  denote the estimated state vector, the output vector and the decision variable vector respectively. The observer gains
denote the estimated state vector, the output vector and the decision variable vector respectively. The observer gains  ,
,  are the unknown parameters to be determined.In order to establish the conditions for the asymptotic convergence of the observer (29), we define the state estimation errors:
are the unknown parameters to be determined.In order to establish the conditions for the asymptotic convergence of the observer (29), we define the state estimation errors: | (30) |
 | (31) |
 | (32) |
 | (33) |
 .Hence, the equation (32) becomes:
.Hence, the equation (32) becomes: | (34) |
 . Since
. Since  , equality (34) can be written as follows:
, equality (34) can be written as follows: | (35) |
 and
and  can be written as follows:
can be written as follows: | (36) |
 and
and  .By substituting (36) in (35), we obtain:
.By substituting (36) in (35), we obtain: | (37) |
 | (38) |
 and
and  , we have:
, we have: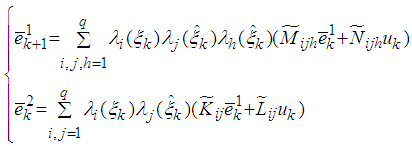 | (39) |
 | (40) |
 toward zero, it suffices to prove from (39) that
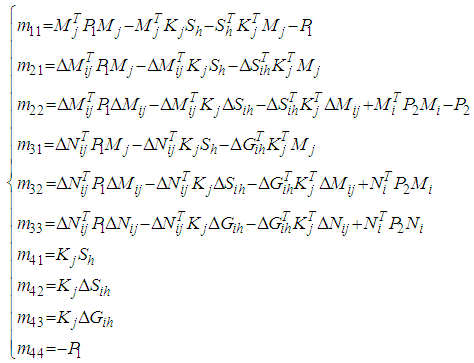
toward zero, it suffices to prove from (39) that  converges toward zero. Then, the following result can be stated.Theorem 2. The system (39) is globally asymptotically stable if there exist matrices
converges toward zero. Then, the following result can be stated.Theorem 2. The system (39) is globally asymptotically stable if there exist matrices verifying the following LMIs:
verifying the following LMIs: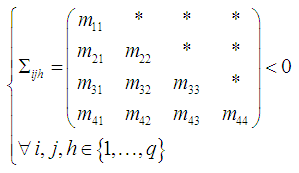 | (41) |
 | (42) |
 of the observer (29) are then computed by:
of the observer (29) are then computed by: | (43) |
 | (44) |
 along the trajectory of (39) is given by:
along the trajectory of (39) is given by: | (45) |
 | (46) |
 | (47) |
 can be written in the form:
can be written in the form: | (48) |
 | (49) |
 | (50) |
 can be reduced as follows:
can be reduced as follows: | (51) |
 | (52) |
 is guaranteed if:
is guaranteed if: | (53) |
 | (54) |
4. Application to a Heat Exchanger System
- In this section, the proposed fuzzy observer design (29) is applied to a heat exchanger pilot process in order to estimate on-line these unknown states. The following discrete-time T-S descriptor model with unmeasurable premise variables that we consider here is obtained by Euler discretisation of the model given in [15]. It takes the form:
 | (55) |
 is the state vector,
is the state vector,  is the control vector,
is the control vector, 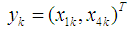 is the vector of output measurements.
is the vector of output measurements.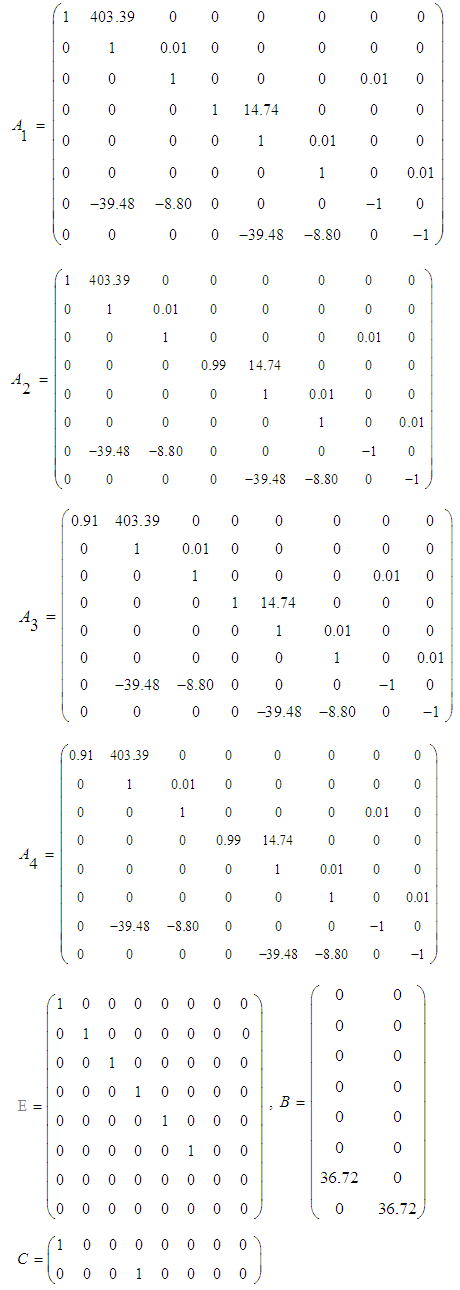 The membership functions are given by:
The membership functions are given by: | (56) |
 Note that, the application of the proposed observer (29) for heat exchanger pilot process requires that the above model (55) takes the form (15). To do so, considering the following:
Note that, the application of the proposed observer (29) for heat exchanger pilot process requires that the above model (55) takes the form (15). To do so, considering the following: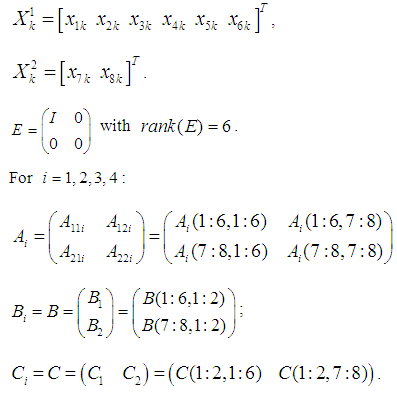 This shows that the model (55) is a particular case of the system (3).Hence, the fuzzy descriptor system (55) can be rewritten in the following equivalent form:
This shows that the model (55) is a particular case of the system (3).Hence, the fuzzy descriptor system (55) can be rewritten in the following equivalent form: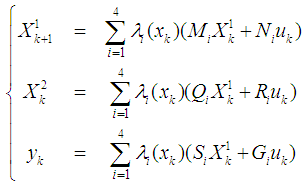 | (57) |
 are given in the above equation (10).Using Theorem 2, we obtain the following observer gains:
are given in the above equation (10).Using Theorem 2, we obtain the following observer gains: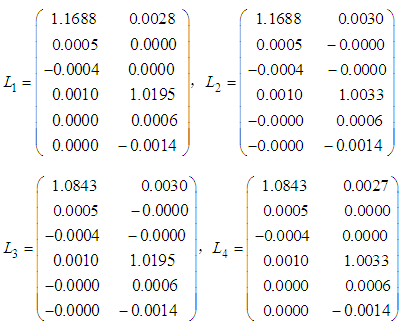 The numerical values of control vector are:
The numerical values of control vector are: Simulation results with initial conditions:
Simulation results with initial conditions: are given in figures 1 to 6.These results of the simulation show the performances of the proposed observer (29) with the parameters
are given in figures 1 to 6.These results of the simulation show the performances of the proposed observer (29) with the parameters  where the dotted lines denote the state variables estimated by the fuzzy observer. This simulation shows that the estimated states converge to their corresponding state variables.
where the dotted lines denote the state variables estimated by the fuzzy observer. This simulation shows that the estimated states converge to their corresponding state variables.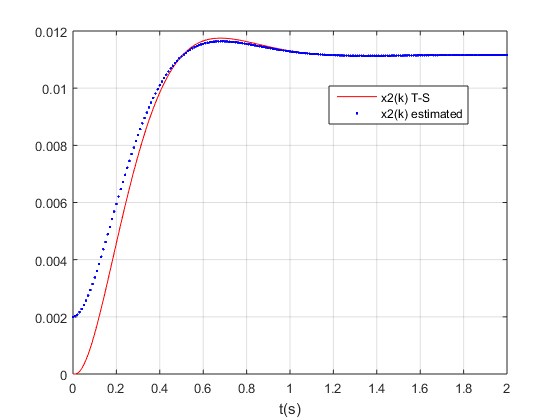 | Figure 1. x2k and its estimate |
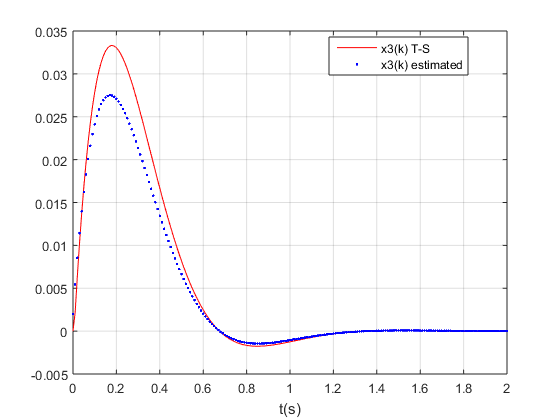 | Figure 2. x3k and its estimate |
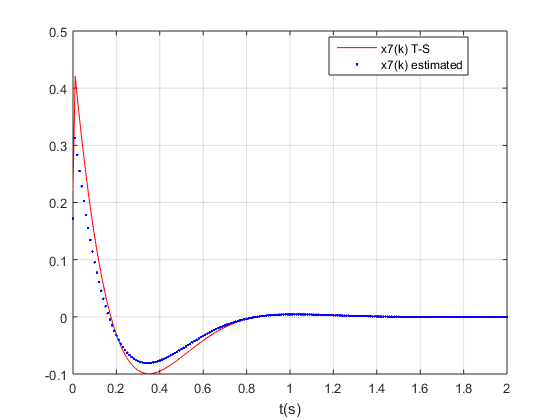 | Figure 3. x7k and its estimate |
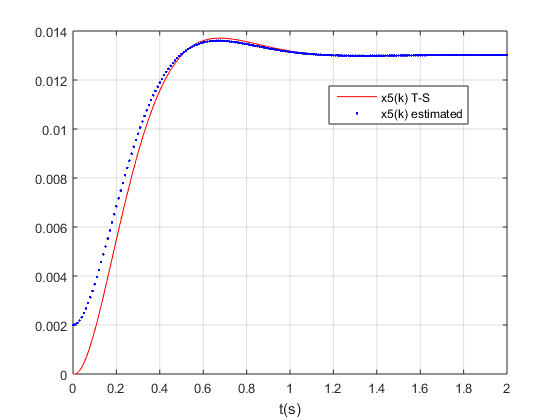 | Figure 4. x5k and its estimate |
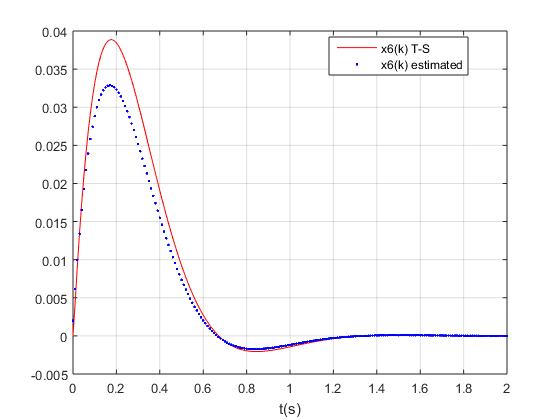 | Figure 5. x6k and its estimate |
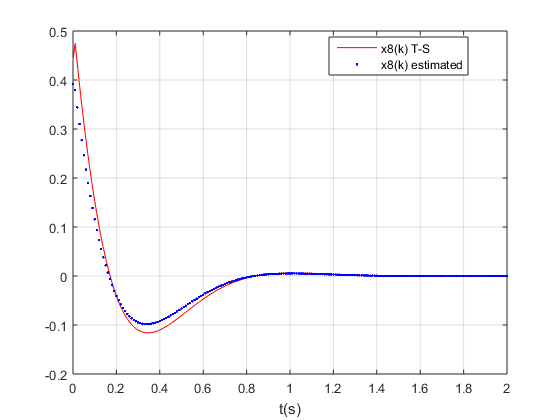 | Figure 6. x8k and its estimate |
5. Conclusions
- Based on the separation approach between recurrence and algebraic equations in the descriptor model, a new method to design fuzzy observer for discrete-time T-S descriptor systems is proposed in this paper. Both measurable and unmeasurable premise variables cases are considered. The convergence conditions are obtained by using Lyapunov theory. The existence of conditions ensuring the convergence of the state estimation error is expressed in terms of LMIs. To illustrate the proposed methodology with unmeasurable premise variables, a discrete-time T-S descriptor model of a heat exchanger is considered. The effectiveness of the proposed fuzzy observer for the on-line estimation of unknown states of the used model is verified by numerical simulation.