-
Paper Information
- Next Paper
- Previous Paper
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
International Journal of Control Science and Engineering
p-ISSN: 2168-4952 e-ISSN: 2168-4960
2013; 3(2): 41-47
doi:10.5923/j.control.20130302.02
Experimental Study of Synchronization & Anti-synchronization for Spin Orbit Problem of Enceladus
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLMohammad Shahzad, Israr Ahmad
Department of General Requirements, College of Applied Sciences, Nizwa, Oman
Correspondence to: Mohammad Shahzad, Department of General Requirements, College of Applied Sciences, Nizwa, Oman.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
In this paper, we have investigated the synchronization and anti-synchronization phenomenon of two identical spin orbit problem of enceladus evolving from different initial conditions using the active control technique based on the Lyapunov stability theory and Routh-Hurwitz criteria. The designed controller, with our own choice of the coefficient matrix of the error dynamics that satisfy the Lyapunov stability theory and Routh-Hurwitz criteria, are found to be effective in the stabilization of the error states at the origin, thereby, achieving synchronization and anti-synchronization between the states variables of two nonlinear dynamical systems under consideration. The results are validated by numerical simulations using mathematica.
Keywords: Synchronization, Active Control, Anti-synchronization (AS)
Cite this paper: Mohammad Shahzad, Israr Ahmad, Experimental Study of Synchronization & Anti-synchronization for Spin Orbit Problem of Enceladus, International Journal of Control Science and Engineering, Vol. 3 No. 2, 2013, pp. 41-47. doi: 10.5923/j.control.20130302.02.
Article Outline
1. Introduction
- Synchronization in chaotic dynamical systems has been of major interest both from a fundamental point of view and due to its potential applications in a wide variety of systems. In recent times the phenomenon of synchronization in nonlinear dynamics has received considerable attention and has been used to understand a wide variety of topics in almost all fields of nonlinear sciences[1-5]. Synchronization techniques have been improved in recent years and many different methods are applied theoretically as well as experimentally to synchronize the chaotic systems[6-10]. Notable among these methods, chaos synchronization using active control scheme has recently been widely accepted as one of the efficient technique to synchronize the chaotic systems which is based on the Lyapunov stability theory and Routh-Hurwitz criteria to use active control in order to achieve stable synchronization has been applied to many practical systems successfully[11-24].In this article, we have applied the active control technique based on the Lyapunov stability theory and Routh-Hurwitz criteria to study the synchronization and AS phenomenon of two identical spin orbit problem of enceladus (a satellite of Saturn) in elliptic orbit evolving from different initial conditions. The system under consideration is chaotic for some values of parameter involved in the system. In synchronization, the two systems (master & slave) are synchronized that starts with different initial conditions. The same problem may be treated as the design of control laws for full chaotic slave system using the known information of the master system so as to ensure that the controlled receiver synchronizes with the master system. Hence, the slave chaotic system completely traces the dynamics of the master system in the course of time. The aim of this study is to trace the chaotic dynamics of the spin orbit problem of enceladus, a satellite of Saturn in elliptic orbit based on synchronization and AS. To the best of my knowledge nobody studied this before.
2. Description of the Model
- An approximate model for synchronous rotation in the spin-orbit problem of enceladus using the standardtechniques of Hamiltonian perturbation theory was developed by Wisdom[25]. It is based on approximation for a fixed orbit the planet-to-satellite distance and the true anomaly is periodic. The Hamiltonian governing the rotational dynamics of an out of round satellite in a fixed elliptical orbit with spin axis perpendicular to the orbit plane is
 | (2.1) |
 , the moments of inertia are
, the moments of inertia are  , n is the orbital frequency,
, n is the orbital frequency,  measures the orientation of the axis of minimum moment from the line to pericenter, p is the angular momentum conjugate to
measures the orientation of the axis of minimum moment from the line to pericenter, p is the angular momentum conjugate to  .Using the Hamilton’s equations
.Using the Hamilton’s equations  and (2.1), the equation of motion of the system under study can be written as:
and (2.1), the equation of motion of the system under study can be written as: | (2.2) |
3. Synchronization VIA Active Control
- For a system of two coupled chaotic dynamical systems:
 | (3.1) |
 | (3.2) |
 are the phase space (state variables),
are the phase space (state variables),  are the corresponding nonlinear functions and
are the corresponding nonlinear functions and  are the control functions to be determined, synchronization in a direct sense implies
are the control functions to be determined, synchronization in a direct sense implies  . When this occurs the coupled systems are said to be completely synchronized. Since chaos synchronization is related to the observer problem in control theory[26], the problem may be treated as the design of control laws for full chaotic slave system using the known information of the master system so as to ensure that the controlled receiver synchronizes with the master system and hence, the slave chaotic system completely traces the dynamics of the master in the course of time.Introducing the two variables:
. When this occurs the coupled systems are said to be completely synchronized. Since chaos synchronization is related to the observer problem in control theory[26], the problem may be treated as the design of control laws for full chaotic slave system using the known information of the master system so as to ensure that the controlled receiver synchronizes with the master system and hence, the slave chaotic system completely traces the dynamics of the master in the course of time.Introducing the two variables:  and
and  , the system defined by (2.2) can be written as
, the system defined by (2.2) can be written as  | (3.3) |
 | (3.4) |
 and
and  are control functions to be determined. Let
are control functions to be determined. Let  be the synchronization errors such that
be the synchronization errors such that  for
for  . From (3.3) and (3.4), we have
. From (3.3) and (3.4), we have | (3.5) |
 and
and  , we redefine the control functions as follows:
, we redefine the control functions as follows: | (3.6) |
 | (3.7) |
 for
for  . As long as these feedbacks stabilize the system,
. As long as these feedbacks stabilize the system,  for
for  . This simply implies that the two systems (3.3) and (3.4) evolving from different initial conditions are synchronized. As functions of
. This simply implies that the two systems (3.3) and (3.4) evolving from different initial conditions are synchronized. As functions of  and
and  , we choose
, we choose  and
and  as follows:
as follows: | (3.8) |
 , is a
, is a  constant feedback matrix to be determined. Hence the error system (3.7) can be written as:
constant feedback matrix to be determined. Hence the error system (3.7) can be written as: | (3.9) |
 , is the coefficient matrix. According to the Lyapunov stability theory and the Routh-Hurwitz criteria, if
, is the coefficient matrix. According to the Lyapunov stability theory and the Routh-Hurwitz criteria, if | (3.10) |
 | (3.11) |
 is a real number which is usually set equal to 1. There are several ways of choosing the constant elements a, b, c, d of matrix D in order to satisfy the Lyapunov stability theory and the Routh-Hurwitz criteria (3.10).
is a real number which is usually set equal to 1. There are several ways of choosing the constant elements a, b, c, d of matrix D in order to satisfy the Lyapunov stability theory and the Routh-Hurwitz criteria (3.10).4. Anti-synchronization VIA Active Control
- AS of two coupled systems (3.1) and (3.2) means
 . This phenomenon has been investigated both experimentally and theoretically in many physical systems by many researchers[19, 20, 24, 27-30]. A recent study of the AS phenomenon in non-equilibrium systems suggests that it could be used as a technique for particle separation in a mixture of interacting particles[20]. It has been shown that AS was working faster than synchronization in the study of Shahzad[24].In order to formulate the active controllers for AS, we need to redefine the error functions as
. This phenomenon has been investigated both experimentally and theoretically in many physical systems by many researchers[19, 20, 24, 27-30]. A recent study of the AS phenomenon in non-equilibrium systems suggests that it could be used as a technique for particle separation in a mixture of interacting particles[20]. It has been shown that AS was working faster than synchronization in the study of Shahzad[24].In order to formulate the active controllers for AS, we need to redefine the error functions as  , where
, where  are called the AS errors such that
are called the AS errors such that  for
for  . From (3.3) and (3.4), error dynamics for AS can be written as:
. From (3.3) and (3.4), error dynamics for AS can be written as: | (4.1) |
 | (4.2) |
 | (4.3) |
 for
for  . As long as these feedbacks stabilize the system,
. As long as these feedbacks stabilize the system,  for
for  . This simply implies that the two systems (3.3) and (3.4) evolving from different initial conditions are AS. As functions of
. This simply implies that the two systems (3.3) and (3.4) evolving from different initial conditions are AS. As functions of  and
and  , we choose
, we choose  and
and  as follows:
as follows: | (4.4) |
 , is a
, is a  constant feedback matrix to be determined. Hence the error system (4.3) can be written as:
constant feedback matrix to be determined. Hence the error system (4.3) can be written as: | (4.5) |
 , is the coefficient matrix. According to the Lyapunov stability theory and the Routh-Hurwitz criteria, if
, is the coefficient matrix. According to the Lyapunov stability theory and the Routh-Hurwitz criteria, if | (4.6) |
 | (4.7) |
 is a real number which is usually set equal to 1. There are several ways of choosing the constant elements a, b, c, d of matrix D in order to satisfy the Lyapunov stability theory and the Routh-Hurwitz criteria (4.6).
is a real number which is usually set equal to 1. There are several ways of choosing the constant elements a, b, c, d of matrix D in order to satisfy the Lyapunov stability theory and the Routh-Hurwitz criteria (4.6).5. Numerical Simulation
- For the constant elements of feedback matrix, choosing
 and for the parameters involved in system under investigation,
and for the parameters involved in system under investigation,  and together with the initial conditions
and together with the initial conditions  and
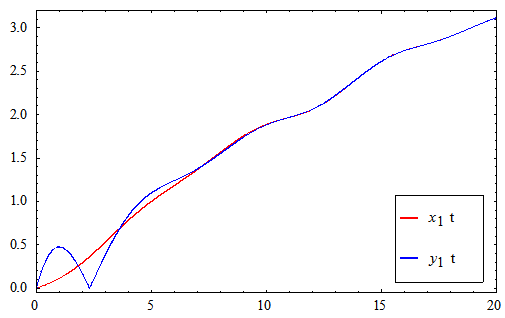
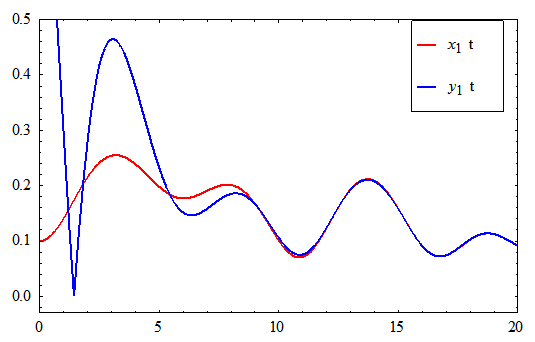
and  , we have simulated the system under consideration using mathematica for both synchronization as well as AS phenomenon. The obtained results show that the system under consideration achieved synchronization & AS. It can be easily seen in figures 1 & 2 that the time series of the states variables are started to synchronize as
, we have simulated the system under consideration using mathematica for both synchronization as well as AS phenomenon. The obtained results show that the system under consideration achieved synchronization & AS. It can be easily seen in figures 1 & 2 that the time series of the states variables are started to synchronize as  and figure 3 is the witness of the synchronization errors that are approaching towards zero as
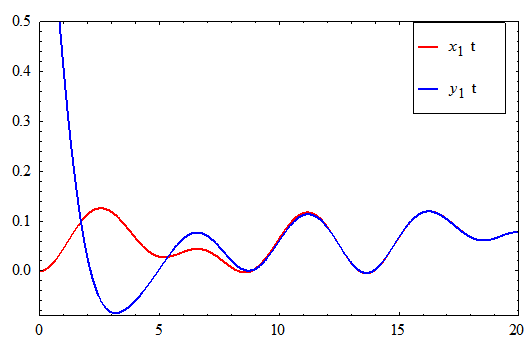
and figure 3 is the witness of the synchronization errors that are approaching towards zero as  between the states variables of the master & slave systems given by (3.3) & (3.4). For the same master & slave systems, AS phenomenon can be seen in the figures 4-6. Further, it also has been confirmed by the convergence of the synchronization and AS quality defined by
between the states variables of the master & slave systems given by (3.3) & (3.4). For the same master & slave systems, AS phenomenon can be seen in the figures 4-6. Further, it also has been confirmed by the convergence of the synchronization and AS quality defined by | (5.1) |
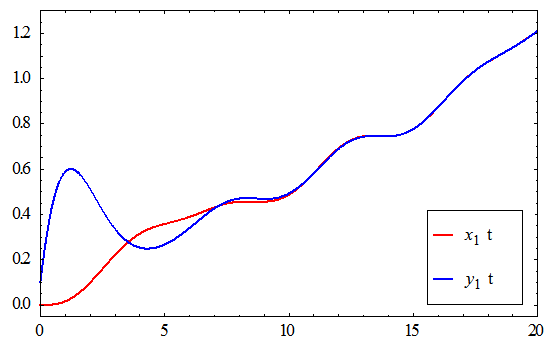 | Figure 1. Time Series of x1 & y1 for Synchronization |
 | Figure 2. Time Series of x2 & y2 for Synchronization |
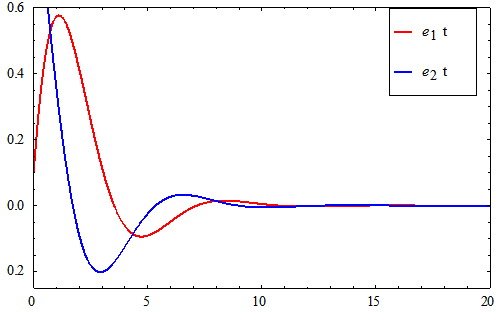 | Figure 3. Time Series of e2 & e2 for Synchronization |
 | Figure 4. Time Series of x2 & y2 for A Synchronization |
 | Figure 5. Time Series of x2 & y2 for A Synchronization |
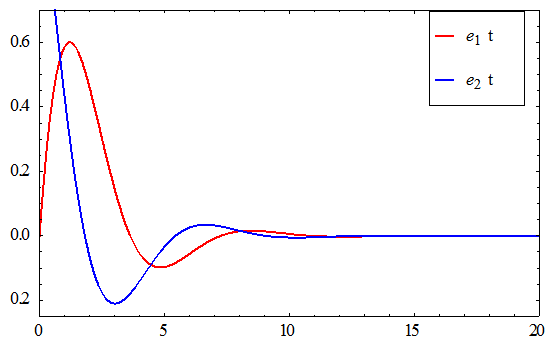 | Figure 6. Time Series of e2 & e2 for Synchronization |
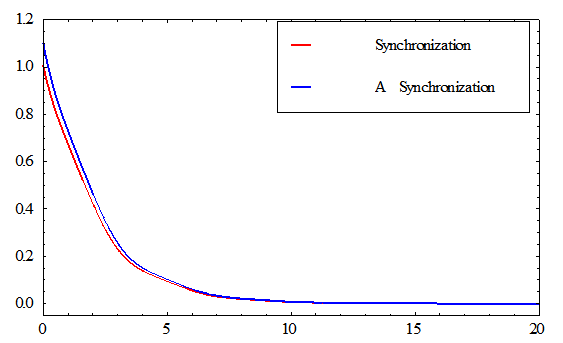 | Figure 7. Convergence of Errors |
6. Conclusions
- In this paper, we have investigated the synchronization and AS behaviour of the two identical spin orbit problem of a satellite in elliptic orbit evolving from different initial conditions via the active control technique based on the Lyapunov stability theory and the Routh-Hurwitz criteria. The results were validated by numerical simulations using mathematica. For the errors in synchronization and AS behavior of the system under study, we have observed that the rate of convergence of errors is almost same in synchronization as well AS phenomenon that has been shown in figure (7).