-
Paper Information
- Next Paper
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
International Journal of Control Science and Engineering
p-ISSN: 2168-4952 e-ISSN: 2168-4960
2012; 2(6): 136-142
doi: 10.5923/j.control.20120206.01
Structural Identification of Static Systems with Distributed Lags
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-Text HTML
Full-Text HTMLNikolay Karabutov
Department of Problems Control, Moscow state engineering university of radio engineering, electronics and automation, 119454, Moscow, Russia
Correspondence to: Nikolay Karabutov, Department of Problems Control, Moscow state engineering university of radio engineering, electronics and automation, 119454, Moscow, Russia.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
The approach to structural identification of static systems with the distributed lags is offered. The criterion of an estimation of linearity of system in parametrical space is introduced. The criterion is based on construction of set of secants for system. The special space for an estimation of structural parameters of system is selected. The concept of level of nonlinearity of system is introduced and the method of his estimation is reduced. The analogue of criterion of Darbin-Watson is reduced. Criteria of decision-making in the presence of a lag as in an output variable, and input variables are offered. It is shown that as magnitude of a lag performance on an output variable one can to use an estimation of parameters of coefficient of structural properties on the specified variable. Estimations of parameters of coefficient of structural properties are based on an evaluation of Lyapunov characteristic indicators.
Keywords: Structural identification, Distributed lags, Linearity level, Secant
Cite this paper: Nikolay Karabutov, "Structural Identification of Static Systems with Distributed Lags", International Journal of Control Science and Engineering, Vol. 2 No. 6, 2012, pp. 136-142. doi: 10.5923/j.control.20120206.01.
Article Outline
1. Introduction
- With the distributed delays the set of publications is devoted problems of identification of static plants. Such models are widely applied in econometrics and economy[1-4], to the technician[5-7], medicine[8-10]. Delay can have both independent, and dependent variables. The account of the distributed lags leads to autocorrelation between variables[1,2,4]. Autocorrelation hampers identification of parameters of plant. Various models of approximation of parameters are applied to a abatement of influence of autocorrelation on identification process at the distributed lags. It allows to reduce number of estimated parameters of plant. The Koyck scheme[2,12], based on a change of factors of model on a decreasing geometrical progression is most widely applied. The model I. Fisher[1,11] is based on a change of factors of model on the set decreasing arithmetical progression. Arithmetical and geometrical models are applied in that case when plant parameters decrease from the first members of a progression. Considering it, S. Almon[13] has added more flexibilities of model of I. Fisher, having applied polynomial the law of a modification of factors. In[11] the law of a change of factors is offered at the distributed lags according to logarithmic normal distribution. The same idea based on application the exponential law of distribution, is considered in[14]. In[15] Pascal distribution which leads to the simple form for factors is applied.The a priori representation of correlation between the distributed lags in the form of some rational polynomial is considered in[16]. Other approaches to description of factors at the distributed lags are studied in[4].The considered models of factors minimise number of unknown parameters. To an estimation of parameters apply a method least-squares method or its modifications[1-4]. In these works the model structure is postulated a priori and the problem of parametrical identification is considered. In[17] the interactive algorithm of an estimation of parameters of static plant with the distributed lags is offered. The length of a lag is set and does not become any suppositions about correlation between plant parameters. The case of a piecewise monotonic change of parameters of plant is considered. In a number of works methods of a choice of maximum length of a lag are offered. At the heart of applied approaches the statistics which are based on the analysis of residuals[1,15,18] lie. In[19, 20] various methods of an estimation of parameters of model with the distributed lag in a case of a priori set structure of model are considered. In[21] influence of the a priori information received from the analysis of the empirical data, on a choice of structure of model with the distributed lag on an output variable is analyzed. In work[22] are described algorithm of an estimation of parameters of model with the distributed lag. On the basis of results of modelling the structure of model which explains a mismatch of model applied now in the American interest rate on federal funds is selected. In[23] process of inflation with the help autoregressive models is researched. The choice of length of a lag is carried out on the basis of consecutive magnification of delays and an estimation of adequacy of the received model. Then the criterion of Akaike and Bayesian Information Criteria are applied and the solution is made on model structure. The case of a priori uncertainty concerning structure and plant parameters was not study.In the given work the approach to structural identification of static plants in the conditions of uncertainty is offered. It is based on application of the static structures describing properties of plant[24] in special space. The criterion of linearity (autocorrelation) of variables of plant is introduced. Algorithms of decision-making on maximum length of the distributed lag are offered. They do not demand an evaluation of the statistics. The analogue of criterion Darbina-Watson criterion for a considered case is reduced.
2. Problem Statement
- Consider plant
 | (1) |
 is an exit,
is an exit,  is the input vector which elements are limited, is limiting nondegenerate functions,
is the input vector which elements are limited, is limiting nondegenerate functions,  is a vector of the distributed lags on
is a vector of the distributed lags on  ,
,  ,
,  is discrete time,
is discrete time, 
 are vectors of constant parameters,
are vectors of constant parameters,  is a perturbation,
is a perturbation,  for all
for all  .Consider that general case
.Consider that general case  and
and 
 are irregular functions of time.For (1) the set of the measured values is known
are irregular functions of time.For (1) the set of the measured values is known | (2) |

 describing an observable informational portrait[7,24].It is necessary
describing an observable informational portrait[7,24].It is necessary  to estimate on the basis of analysis structure of plant (1). It means that it is necessary to estimate degree of linearity and dimension of vector
to estimate on the basis of analysis structure of plant (1). It means that it is necessary to estimate degree of linearity and dimension of vector  .
.3. An Estimation of Level of Linearity of System (1)
- Consider a contraction of observable informational portrait

 and for everyone
and for everyone  construct a secant
construct a secant where
where  are some real numbers.Introduce set on (2) set of secants for
are some real numbers.Introduce set on (2) set of secants for 
 Definition 1[24]. Field of structures
Definition 1[24]. Field of structures  of system (1) name set of maps
of system (1) name set of maps 
 on Euclidean plane
on Euclidean plane 
 Designate
Designate  and consider the equation
and consider the equation | (3) |
 define by means of a least-squares method. Estimation
define by means of a least-squares method. Estimation  exists on the basis of the suppositions made in section 2 concerning input
exists on the basis of the suppositions made in section 2 concerning input  .Completeness of system (1) in the field of structures
.Completeness of system (1) in the field of structures  estimate on the basis of the following statement[24].Theorem 1. Consider a vector of informative variables
estimate on the basis of the following statement[24].Theorem 1. Consider a vector of informative variables  and a field of structures
and a field of structures  for (1). Then the field of structures
for (1). Then the field of structures  of system (1) is full, if
of system (1) is full, if | (4) |
 there is
there is  element of vector
element of vector  in (4).The theorem 1 gives linearity sufficient conditions (nonlinearities, collinearity) systems (1) on the set field of structures
in (4).The theorem 1 gives linearity sufficient conditions (nonlinearities, collinearity) systems (1) on the set field of structures  . If the condition (4) is fulfilled, that field
. If the condition (4) is fulfilled, that field  is full. Hence
is full. Hence  is a linear span of an exit of system (1). Otherwise make a solution on presence of nonlinearity or collinearity (autocorrelation) in system (1).Let
is a linear span of an exit of system (1). Otherwise make a solution on presence of nonlinearity or collinearity (autocorrelation) in system (1).Let Magnitude
Magnitude  name level of nonlinearity of system (1) in parametrical space
name level of nonlinearity of system (1) in parametrical space  . As nonlinearities and lags lead to occurrence multicollinearity in (1)
. As nonlinearities and lags lead to occurrence multicollinearity in (1)  will accept small values.
will accept small values.4. Set for an Estimation of Structure of the Distributed Lag of Plant
- Following[7,24], generate auxiliary set for an estimation of structure (1). Introduce variable
 , where
, where  is an unit vector, and apply model
is an unit vector, and apply model  . Define parameter
. Define parameter  from a condition
from a condition | (5) |
 is a variable which contains the data about structure of a lag of system (1). As argument
is a variable which contains the data about structure of a lag of system (1). As argument  use variable
use variable  which ensures maximum value of coefficient of determination
which ensures maximum value of coefficient of determination  between and
between and  . As shown in[24], set
. As shown in[24], set  does not allow to solve a problem of structural identification. Therefore introduce coefficient of structural properties (CSP)[7]
does not allow to solve a problem of structural identification. Therefore introduce coefficient of structural properties (CSP)[7] | (6) |
 Definition 2. Name
Definition 2. Name  structural space of the system (1), allowing to identify structure of vector
structural space of the system (1), allowing to identify structure of vector  .On
.On  will order
will order  on increase. Generate
on increase. Generate  , where
, where  ,
,  . As to everyone
. As to everyone  there corresponds value
there corresponds value  receive
receive  . In
. In  define map
define map  and structure
and structure  corresponding to it. Now the problem is shown to an estimation of structure
corresponding to it. Now the problem is shown to an estimation of structure  on the basis of analysis
on the basis of analysis  and
and  . Such approach well works at an estimation of structure of nonlinear static systems[24]. For systems with the distributed lag he demands modification.
. Such approach well works at an estimation of structure of nonlinear static systems[24]. For systems with the distributed lag he demands modification.5. Decision-Making on Length of a Lag in 
- Set
 contains uncertainty
contains uncertainty  and
and  .
.  is an incomplete account of linear making system (1).
is an incomplete account of linear making system (1).  is a presence of perturbation from the distributed lag. For elimination
is a presence of perturbation from the distributed lag. For elimination  construct a secant for
construct a secant for 
 where
where  define as a solution of a problem (5).Introduce new variable
define as a solution of a problem (5).Introduce new variable  which does not contain
which does not contain  . For estimation
. For estimation  analyse set
analyse set  .For deriving of a provisional estimate of maximum lag fulfil following operations. Set admissible level
.For deriving of a provisional estimate of maximum lag fulfil following operations. Set admissible level  of coefficient of determination
of coefficient of determination  . Apply the following algorithm.Algorithm
. Apply the following algorithm.Algorithm  .1. Suppose
.1. Suppose  .2. Construct a secant
.2. Construct a secant and define
and define  .3. Verify up condition
.3. Verify up condition  .4. If the condition is fulfilled, suppose
.4. If the condition is fulfilled, suppose  and go to a step 2, differently finish work.In work the multiple-functional approach to structural identification is applied. Therefore known methods of a choice of length of the lag, based on statistical criteria (section 1 see), are inapplicable.Considering it, to an estimation of independence of elements of vector
and go to a step 2, differently finish work.In work the multiple-functional approach to structural identification is applied. Therefore known methods of a choice of length of the lag, based on statistical criteria (section 1 see), are inapplicable.Considering it, to an estimation of independence of elements of vector  apply the theorem 1. As the analysis of set
apply the theorem 1. As the analysis of set  is in this case ineffective, that use results of section 4 and generate set
is in this case ineffective, that use results of section 4 and generate set | (7) |
 calculate on the basis of (6), considering
calculate on the basis of (6), considering  ,
,  .On
.On  will introduce transformation
will introduce transformation to which in space
to which in space  there corresponds structure
there corresponds structure  ,
,  . Construct secants for
. Construct secants for 
 | (8) |
 are the coefficients defined as a result of a solution of a problem (5),
are the coefficients defined as a result of a solution of a problem (5),  is value m received on the basis of application of algorithm
is value m received on the basis of application of algorithm  .Generate a vector
.Generate a vector | (9) |
 to forecasting of change
to forecasting of change  , where vector
, where vector  is defined on the basis of outcomes of section 3.The statement following directly from the theorem 1 is fair.Theorem 2. Let on set
is defined on the basis of outcomes of section 3.The statement following directly from the theorem 1 is fair.Theorem 2. Let on set  the field of secants for
the field of secants for  is constructed
is constructed and model
and model  is applied to forecasting of a change of variable
is applied to forecasting of a change of variable  . Then vector
. Then vector  is an element of structure of system (1), if
is an element of structure of system (1), if where
where  it is defined by means of algorithm
it is defined by means of algorithm  ,
,  .Remark. As
.Remark. As  contains the information on influence of vector
contains the information on influence of vector  at statistical interpretation
at statistical interpretation  ,
,  use analag of criterion of criterion of Darbin-Watson
use analag of criterion of criterion of Darbin-Watson Level of nonlinearity of the system (1), generated by correlation of elements of vector
Level of nonlinearity of the system (1), generated by correlation of elements of vector  is equal
is equal Theorem 3. Consider the set of secants
Theorem 3. Consider the set of secants  set on
set on  and secant
and secant  for
for  . Let for them coefficients of determination
. Let for them coefficients of determination  ,
,  and
and  are known. Then vector
are known. Then vector  is an element of structure of system (1), if
is an element of structure of system (1), if 
 where
where  is a specified magnitude.At structure
is a specified magnitude.At structure  analysis, the distributed lag of system (1) interpret as a nonlinear component (1). Therefore design the corresponding procedure, allowing to make the solution on a class of uncertainty
analysis, the distributed lag of system (1) interpret as a nonlinear component (1). Therefore design the corresponding procedure, allowing to make the solution on a class of uncertainty  . Apply the following approach.Consider set
. Apply the following approach.Consider set  and static structure
and static structure  corresponding to it. Construct the secants
corresponding to it. Construct the secants 
 and define for them coefficients of determination
and define for them coefficients of determination  ,
,  .Consider CSP
.Consider CSP | (10) |
 ,
,  to which there corresponds structure
to which there corresponds structure  . Construct for
. Construct for  a secant
a secant | (11) |
 select so that the factor of determination
select so that the factor of determination  for (11) belonged to interval
for (11) belonged to interval  .Further consider CSP
.Further consider CSP where
where  is an unit vector. Construct a secant for
is an unit vector. Construct a secant for 
 | (12) |
 through
through  .Theorem 4. Consider structures
.Theorem 4. Consider structures  ,
,  and secants (11), (12) corresponding to them. If for structure
and secants (11), (12) corresponding to them. If for structure  ,
,  secants the condition is satisfied
secants the condition is satisfied then
then  is an element of structure of system (1).The proof of the theorem 4 is obvious. It is based that structures
is an element of structure of system (1).The proof of the theorem 4 is obvious. It is based that structures  ,
,  describe a change of same variable
describe a change of same variable  . Therefore a solution about inclusion in structure of system (1) accept concerning that variable
. Therefore a solution about inclusion in structure of system (1) accept concerning that variable  ,
,  which ensures greater coefficient of determination.Statement. If coefficient of determination
which ensures greater coefficient of determination.Statement. If coefficient of determination  , then
, then  .Proof. From
.Proof. From  follows that parameter
follows that parameter  of model
of model  predicting a change of variable
predicting a change of variable  , is equal to zero. Then for
, is equal to zero. Then for  receive
receive | (13) |
 . Substituting
. Substituting  in (13), for fraction numerator receive
in (13), for fraction numerator receive | (14) |
 where
where  there is average value
there is average value  , then
, then .Results of modelling confirm the made statement.Consider a case when vector
.Results of modelling confirm the made statement.Consider a case when vector  in (1) contains the distributed lags on
in (1) contains the distributed lags on  , that is
, that is  .
.6. Decision-Making on Length of a Lag for 
- Let
 , where
, where  ,
,  . To tentative estimation
. To tentative estimation  apply algorithm
apply algorithm  . Decision-making in space
. Decision-making in space  , can appear ineffective because of connections between
, can appear ineffective because of connections between  . Therefore consider space
. Therefore consider space  set on set
set on set  . Consider structure
. Consider structure  and its projections
and its projections  to plane
to plane  . For everyone
. For everyone  define secants
define secants  ,
,  Also generate a vector
Also generate a vector | (15) |
 the field of secants for
the field of secants for  is constructed
is constructed and model
and model  is applied to forecasting of variable
is applied to forecasting of variable  . Then vector
. Then vector  is an element of structure of system (1), if
is an element of structure of system (1), if | (16) |
 define by means of algorithm
define by means of algorithm  ,
,  .The theorem 5 is analogue of the theorem 2. Performance (16) specifies on presence of dependence between
.The theorem 5 is analogue of the theorem 2. Performance (16) specifies on presence of dependence between  . At statistical interpretation of a problem (16) speaks about autocorrelation of residuals[1]. Level of nonlinearity of system (1) estimate by means of
. At statistical interpretation of a problem (16) speaks about autocorrelation of residuals[1]. Level of nonlinearity of system (1) estimate by means of  .For an estimation of existence of a lag on
.For an estimation of existence of a lag on  analyse a change CSP
analyse a change CSP As the log on
As the log on  is considered, then
is considered, then | (17) |
 is an eigenvalue of system (1) with
is an eigenvalue of system (1) with  , is an interval of measurement of the data.The problem consists in estimation
, is an interval of measurement of the data.The problem consists in estimation  on the basis of analysis
on the basis of analysis  and identification of parameter
and identification of parameter  on set
on set  . To estimation
. To estimation  apply Lyapunov characteristic indicators.Apply model
apply Lyapunov characteristic indicators.Apply model  to forecasting of change
to forecasting of change  and define parameter
and define parameter  by means of a least-squares method. To description
by means of a least-squares method. To description  also apply model
also apply model  , where
, where  . From comparison of these two models receive
. From comparison of these two models receive | (18) |
 in ascending order and receive set
in ascending order and receive set  . Define for
. Define for  of Lyapunov characteristic indicator[25]
of Lyapunov characteristic indicator[25] | (19) |
 is an limit superior,
is an limit superior,  .Suppose
.Suppose  where
where  there is estimation
there is estimation  . To an improving of received estimation
. To an improving of received estimation  apply the approach offered in[24].Remark. Estimation
apply the approach offered in[24].Remark. Estimation  serves as the indicator of presence at system (1) distributed lags on
serves as the indicator of presence at system (1) distributed lags on  . Exact estimation
. Exact estimation  define only at a step of parametrical identification.Consider the more general case when vector
define only at a step of parametrical identification.Consider the more general case when vector  in (1) is equal
in (1) is equal  , where
, where  ,
,  .
.7. Decision-Making on Length of a Lag for 
- Spread the approach stated above to system (1) with
 . The provisional estimate of level of linearity of system (1) receive by means of the theorem 1. Introduce variable
. The provisional estimate of level of linearity of system (1) receive by means of the theorem 1. Introduce variable  which depends on uncertainty
which depends on uncertainty  . Apply algorithm
. Apply algorithm  to definition of dimension of vectors
to definition of dimension of vectors  ,
,  . For elimination of influence
. For elimination of influence  construct a secant for
construct a secant for 
 where define as a solution of a problem (5).Introduce new variable
where define as a solution of a problem (5).Introduce new variable  which does not contain
which does not contain  . To decision-making on lag presence apply results of sections 5, 6.
. To decision-making on lag presence apply results of sections 5, 6.8. Examples
 | Figure 1. Structures for decision-making on length of lag  |
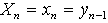
 | Figure 2. Variables  |
 ,
,  ,
,  ,
,  .
.  are limited random functions,
are limited random functions,  is an stochastic variable with zero expectation and a final variance,
is an stochastic variable with zero expectation and a final variance,  . Application of the theorem 1 has shown that the system is not linear,
. Application of the theorem 1 has shown that the system is not linear,  . Receive set
. Receive set Analysis
Analysis  has shown that variable
has shown that variable  has a lag. Apply algorithm
has a lag. Apply algorithm  and the theorem 2. The length of a lag on
and the theorem 2. The length of a lag on  is equal 2. Indicator
is equal 2. Indicator  practically coincides with
practically coincides with  . To an correction of the received estimation of length of a lag apply the theorem 3 with
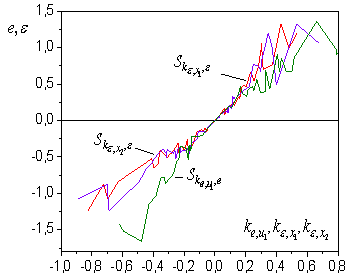
. To an correction of the received estimation of length of a lag apply the theorem 3 with  .
.  ,
,  ,
,  ,
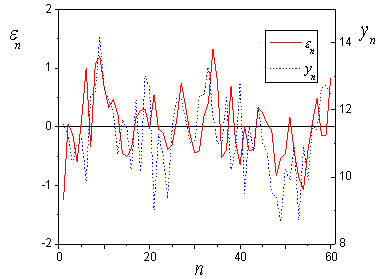
,  . Corresponding structures on which the theorem 3 is based, are shown on fig. 1. Corresponding structures on which the theorem 3 is based, are shown on fig. 1.On fig. 2 show variables
. Corresponding structures on which the theorem 3 is based, are shown on fig. 1. Corresponding structures on which the theorem 3 is based, are shown on fig. 1.On fig. 2 show variables  . They confirm presence at system of the distributed lag on
. They confirm presence at system of the distributed lag on  . As inputs are random calculate criterion
. As inputs are random calculate criterion  . Receive
. Receive  that following[2], confirms result about presence a lag.Consider system (1) with
that following[2], confirms result about presence a lag.Consider system (1) with 
 ,
,  . Receive indicator
. Receive indicator  . Make a solution on presence multicollinearity (nonlinearity) in systems. Apply algorithm
. Make a solution on presence multicollinearity (nonlinearity) in systems. Apply algorithm  . Receive
. Receive  . The length of a lag is equal 1. Generate variable
. The length of a lag is equal 1. Generate variable  on the basis of a method described in section 5. On fig. 3 show variables
on the basis of a method described in section 5. On fig. 3 show variables  to estimate delay presence on
to estimate delay presence on  .
. | Figure 3. Delay in system (1) with  |
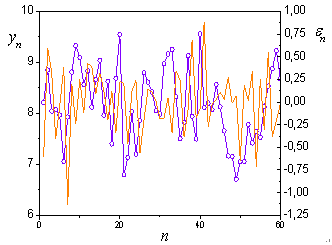
 | Figure 4. Lyapunov characteristic index  |
 at
at  , using dependences (17), (18) and (19). Problem reduce to estimation
, using dependences (17), (18) and (19). Problem reduce to estimation  in (17). On fig. 4 show change
in (17). On fig. 4 show change  on the basis of (19). Suppose
on the basis of (19). Suppose  . More exact estimation
. More exact estimation  in (17) define, using a method offered in[24]. Receive
in (17) define, using a method offered in[24]. Receive  .
.9. Conclusions
- The is functional-multiple approach to structural identification of static systems with the distributed lag is offered. Solution about structure of the distributed lag of system receive on the basis of the analysis of special static structures. The criterion of an estimation of degree of linearity of system in parametrical space is introduced. It is considered variants of identification of system in the availability of a lag on dependent and independent variables. The approach to an