-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
International Journal of Control Science and Engineering
p-ISSN: 2168-4952 e-ISSN: 2168-4960
2012; 2(2): 7-15
doi:10.5923/j.control.20120202.02
New Discrete Sliding Mode Control for Nonlinear Multivariable Systems: Multi-Periodic Disturbances Rejection and Stability Analysis
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLDehri Khadija, Ltaief Majda, Nouri Ahmed Said
National Engineering School of Gabes, University of Gabes, Street of Medenine, Gabes, 6029, Tunisia
Correspondence to: Dehri Khadija, National Engineering School of Gabes, University of Gabes, Street of Medenine, Gabes, 6029, Tunisia.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
The Sliding Mode Control (SMC) is well known by its robustness to parameter uncertainties or external disturbances. The repetitive control (RC) is able to track or reject periodic and multi-periodic signals. This paper presents a new control strategy as a combination of a Sliding Mode approach and Repetitive Control to reject periodic and multi-periodic disturbances in the case of nonlinear multi-input discrete-time systems. A stability analysis of the new repetitive discrete sliding mode control is then proposed. The simulation results show the effectiveness of the proposed control to reject periodic and multi-periodic disturbances.
Keywords: Nonlinear Multivariable Control Systems, Sliding Mode Control, Repetitive Control, Rejection of Periodic And Multi-Periodic Disturbances
Cite this paper: Dehri Khadija, Ltaief Majda, Nouri Ahmed Said, New Discrete Sliding Mode Control for Nonlinear Multivariable Systems: Multi-Periodic Disturbances Rejection and Stability Analysis, International Journal of Control Science and Engineering, Vol. 2 No. 2, 2012, pp. 7-15. doi: 10.5923/j.control.20120202.02.
Article Outline
1. Introduction
- The sliding mode control (SMC) has been widely studied over several decades of years in continuous and discrete time-systems[1,2].The continuous-time SMC is known by its robustness against uncertainties and external disturbances[3,4]. It consists of two steps. The first step is the design of a sliding surface along which the process can slide to find its desired final value. The second one is the synthesis of the control law in such away that any state outside the sliding surface is forced to reach the desired sliding manifold in finite time and stay on it. Nevertheless, the main drawback of the continuous time sliding mode control is the chattering phenomenon which appears as a source to excite unmodeled high frequency dynamics of the process. Many approaches have been proposed to solve this problem such as second and high order sliding mode control[5,6].In the face of the development of computer and applications of digital control, discrete sliding mode control (DSMC) has become more important in academia and industries [7-11]. The important difference between continuous time and discrete time sliding mode control is that the DSMC does not possess the invariance properties found in continuous time systems due to a finite sampling data rate. A discrete quasi-sliding mode control based on new reaching law was proposed by Gao[12]. This control law ensures that system trajectory will hit the surface in finite time and thereafter undergo a zigzag motion in the vicinity of the surface. Therefore, the trajectory will stay within a specified band called the quasi-sliding mode band. However, this approach is sensitive to external disturbances. Due to the modeling errors, the nominal performance is traded off to keep robust stability. As the modeling error expands, the performance of the nominal system becomes unsatisfactory.The dynamics of industrial processes are generally not exactly known, nonlinear, multivariable and are subject to periodic and multi-periodic disturbances, such as: optical and magnetic disk drives, electronic rectifiers, rotating machine tools and robots, etc.In deal with the control of such processes, repetitive control (RC) is a major approach being used[13-17]. The main idea behind repetitive control is to remove errors that occur at the fundamental and harmonics frequency of the periodic signal. The RC is based on the Internal Model Principle (IMP) [18] which states that zero error tracking of any reference input, in a steady state, can be accomplished if a generator of the reference input is incorporated in a stable closed loop system. A periodic signal can be generated by a delay block with a positive feedback loop.The repetitive control has been studied in the continuous and discrete time domain and has been used in different engineering areas. However, the RC may cause system instability. Therefore, the trade off between stability and tracking performance becomes a challenging task in the repetitive control[19,20].Many techniques are developed to ameliorate the discrete sliding mode control. For discrete linear multivariable systems, we have proposed a repetitive sliding mode control with a new reaching law to reduce the problem of chattering and reject the periodic disturbances[21].This work deals with a repetitive sliding mode control for discrete time nonlinear multivariable systems. This approach is designed to force the state trajectories to reach the surface in finite time and keep them on it, and in the same time to reject periodic and multi-periodic disturbances.This paper is organized as follows. Section 2 describes the classical sliding mode control for discrete nonlinear multivariable systems. The development of repetitive sliding mode control to reject periodic and multi-periodic disturbances is presented in section 3. In section 4, a stability analysis of the proposed control is presented. Section 5 gives the simulation results.
2. The Classical Discrete Sliding Mode Control for Nonlinear Multivariable Systems
- Consider a class of nonlinear multi-inputs discrete-time system described by the following model[22]:
 | (1) |
 f is an
f is an  nonlinear function and G is an
nonlinear function and G is an  matrix.The sliding vector is defined as[9,23]:
matrix.The sliding vector is defined as[9,23]: | (2) |
 matrix.The sliding function is chosen in order to verify the following reaching law[23]:
matrix.The sliding function is chosen in order to verify the following reaching law[23]: | (3) |
 is a diagonal matrix such
is a diagonal matrix such  and
and  is a positive gain.The term “sat” represent the saturation function which is defined by:
is a positive gain.The term “sat” represent the saturation function which is defined by: 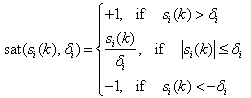 Using the equations (1), (2) and (3), s(k+1) can be written as:
Using the equations (1), (2) and (3), s(k+1) can be written as: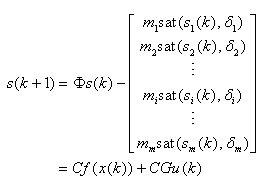 Then, the control law can be expressed as follows:
Then, the control law can be expressed as follows: | (4) |
3. New Discrete Sliding Mode Control for Nonlinear Multivariable Systems: Rejection of Periodic and Multi-Periodic Disturbances
- Consider a nonlinear discrete multivariable system subjected to external disturbances defined by:
 | (5) |
 | (6) |
 | (7) |
3.1. Case of Periodic Disturbances
- We suppose that the components
 of the disturbances’ vector d(k) are assumed to be periodic with the period N:
of the disturbances’ vector d(k) are assumed to be periodic with the period N: The difference between s(k +1) and s(k +1-N) can be expressed as:
The difference between s(k +1) and s(k +1-N) can be expressed as: Or, we have:
Or, we have: Then, the control law can be calculated as:
Then, the control law can be calculated as: Applying the equation (3) in the last relation, the control law can be given as:
Applying the equation (3) in the last relation, the control law can be given as: | (8) |
3.2. Case of Multi-Periodic Disturbances
- We suppose now that the components
 of the disturbances’ vector d(k) are assumed to be multi- periodic:
of the disturbances’ vector d(k) are assumed to be multi- periodic: with
with  are the M periods of disturbances.
are the M periods of disturbances.  can be written as follows:
can be written as follows: | (9) |
 Multiplying s(k + 1) by
Multiplying s(k + 1) by  , we obtain:
, we obtain: | (10) |
 Replace s(k+1) by its expression (equation (3)), the control law can be rewritten as follows:
Replace s(k+1) by its expression (equation (3)), the control law can be rewritten as follows: | (11) |
4. Stability of the New Discrete Multivariable Sliding Mode Control
- By applying the control law (11) to the system (7), the sliding vector s(k + 1) can be written as follows:
 | (12) |
 We note:
We note: Then:
Then: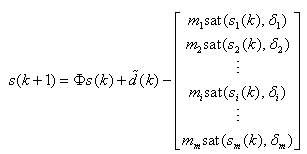 | (13) |
 | (14) |
 | (15) |
 The stability of the proposed control can be given by the following theorem:Theorem 1. Consider the system (7) to which the discrete multivariable repetitive sliding mode control is applied (11).This system verifies a convergent quasi-sliding mode, if the following conditions P1, P2 and P3 are satisfied[25,26]:
The stability of the proposed control can be given by the following theorem:Theorem 1. Consider the system (7) to which the discrete multivariable repetitive sliding mode control is applied (11).This system verifies a convergent quasi-sliding mode, if the following conditions P1, P2 and P3 are satisfied[25,26]: | (16) |
 | (17) |
 | (18) |
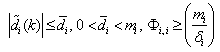 | (19) |
 The difference between
The difference between  and
and  is given by:
is given by: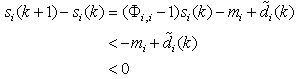 The sum of
The sum of  and
and  can be written as follows:
can be written as follows: Then:
Then: Consider the Case 2:
Consider the Case 2:  In this case, the difference between
In this case, the difference between  and
and  can be calculated as:
can be calculated as: The sum of
The sum of  and
and  can be expressed as:
can be expressed as:  So:
So: Using cases 1 and 2, the condition P1 is verified.Secondly, we consider the condition (17).Consider the Case 3:
Using cases 1 and 2, the condition P1 is verified.Secondly, we consider the condition (17).Consider the Case 3:  We have:
We have: The sliding function
The sliding function  can be written as follows:
can be written as follows: Then:
Then: Consider the Case 4:
Consider the Case 4:  In this case, the expression of the sliding function
In this case, the expression of the sliding function  can be given by:
can be given by: or:
or:  Thus:
Thus: Using cases 3 and 4, we obtain the condition P2.Finally, we consider the third condition (18).Consider the Case 5:
Using cases 3 and 4, we obtain the condition P2.Finally, we consider the third condition (18).Consider the Case 5:  Using this condition, the sliding function
Using this condition, the sliding function  can be expressed as:
can be expressed as: The sliding function
The sliding function  can be written as follows:
can be written as follows:  Then:
Then: Consider the Case 6:
Consider the Case 6:  The sliding function
The sliding function  can be calculated as:
can be calculated as: We have:
We have:  Then:
Then: Using cases 5 and 6, the condition P3 is verified.Using the cases 1, 2, 3, 4, 5 and 6, the three conditions (16), (17) and (18) are verified. Then, the global system with a discrete multivariable repetitive sliding mode control is stable.
Using cases 5 and 6, the condition P3 is verified.Using the cases 1, 2, 3, 4, 5 and 6, the three conditions (16), (17) and (18) are verified. Then, the global system with a discrete multivariable repetitive sliding mode control is stable.5. Simulation Example
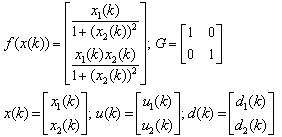
- Consider a nonlinear multivariable system described as follows:with:
 The retained synthesis parameters are:
The retained synthesis parameters are: We suppose that the disturbances are given by:
We suppose that the disturbances are given by: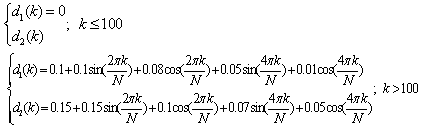 Firstly, we suppose that the period of disturbances is equal to 10 (N=10). The evolution of disturbances d1(k) and d2(k) is given in figure 1.
Firstly, we suppose that the period of disturbances is equal to 10 (N=10). The evolution of disturbances d1(k) and d2(k) is given in figure 1.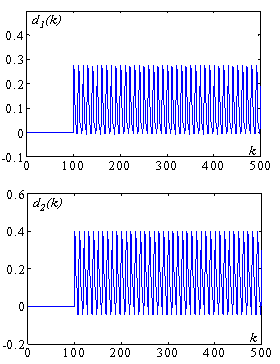 | Figure 1. Evolutions of periodic disturbances d1(k) and d2(k) |
 | Figure 2. Evolutions of the states x1(k) and x2(k) (classical sliding mode control) |
 | Figure 3. Evolutions of the control signals u1(k) and u2(k) (classical sliding mode control) |
 | Figure 4. Evolutions of the sliding functions s1(k) and s2(k) (classical sliding mode control) |
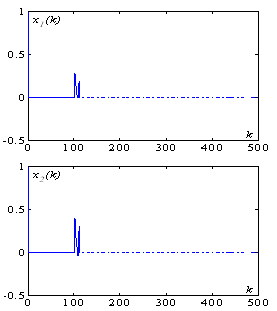 | Figure 5. Evolutions of the states x1(k) and x2(k) (new sliding mode control (8)) |
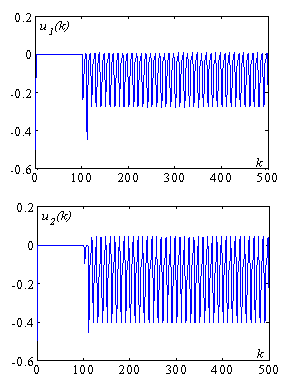 | Figure 6. Evolutions of the control signals u1(k) and u2(k) (new sliding mode control (8)) |
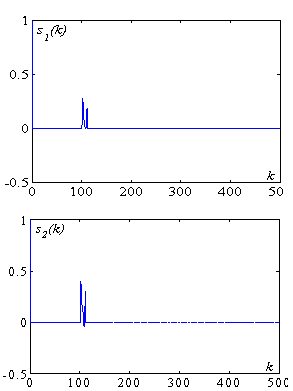 | Figure 7. Evolutions of the sliding functions s1(k) and s2(k) (new sliding mode control (8)) |
 with N1=30. The evolution of disturbances is given in figure 8.
with N1=30. The evolution of disturbances is given in figure 8. | Figure 8. Evolutions of the multi-periodic disturbances d1(k) and d2(k) |
 | Figure 9. Evolutions of the states x1(k) and x2(k) (new sliding mode control (8)) |
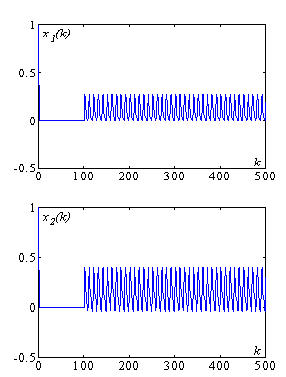
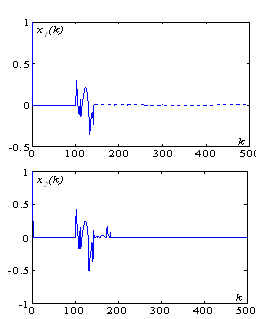 | Figure 10. Evolutions of the states x1(k) and x2(k) (new sliding mode control (11)) |
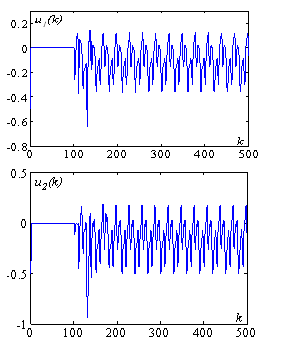 | Figure 11. Evolutions of the control signals u1(k) and u2(k) (new sliding mode control (11)) |
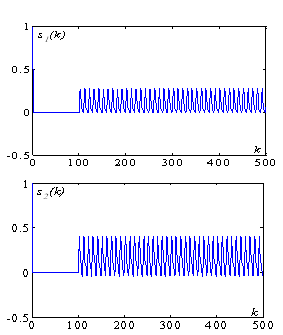
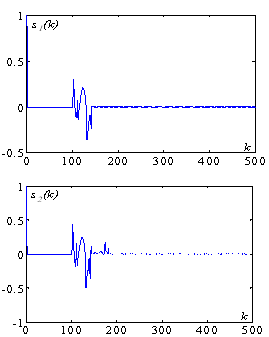 | Figure 12. Evolutions of the sliding functions s1(k) and s2(k) (new sliding mode control (11)). |
6. Conclusions
- In this paper, the problem of rejecting periodic and multi-periodic disturbances for nonlinear discrete multivariable system was considered.To overcome the sensibility of the discrete sliding mode control to periodic and multi-periodic disturbances, a new strategy based on the combination of discrete sliding mode approach and repetitive control was proposed. A stability analysis of the proposed control is studied.The obtained simulation results using the new discrete repetitive sliding mode control show good performances in term of regulation and periodic and multi-periodic disturbances rejection.
ACKNOWLEDGEMENTS
- “This work was supported by the Ministry of the Higher Education and Scientific Research in Tunisia”