-
Paper Information
- Next Paper
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
Computer Science and Engineering
p-ISSN: 2163-1484 e-ISSN: 2163-1492
2013; 3(1): 1-7
doi:10.5923/j.computer.20130301.01
Wireless Routing in Ad-Hoc Networks
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLTzvetalin S. Vassilev, Brian Eades
Department of Computer Science and Mathematics, Nipissing University, North Bay, Ontario, P1B 8L7, Canada
Correspondence to: Tzvetalin S. Vassilev, Department of Computer Science and Mathematics, Nipissing University, North Bay, Ontario, P1B 8L7, Canada.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
Wireless networks present many challenges to standard routing algorithms. Ultimately, what we want from a routing algorithm is for it to be optimal in terms of robustness, scalability, power, and time; however, it will be shown that guaranteed delivery generally comes at the expense of any one of these desirables. This paper will exhibit a progression from routing in static networks to routing in unit distance wireless networks in order to illuminate the reality of the balance between what we want from wireless ad hoc routing algorithms and what we can expect from them. Much of the analysis presented will be on Dijkstra’s algorithm, the Bellman-Ford algorithm, Compass Routing, Face Routing, as well as localized methods to extract planar subgraphs.
Keywords: Wireless Routing, Unit Distance Wireless Networks, Dijkstra’s algorithm, Bellman-Ford algorithm, Compass Routing, Face Routing
Cite this paper: Tzvetalin S. Vassilev, Brian Eades, Wireless Routing in Ad-Hoc Networks, Computer Science and Engineering, Vol. 3 No. 1, 2013, pp. 1-7. doi: 10.5923/j.computer.20130301.01.
Article Outline
1. Introduction
- The ongoing advancements in wireless technology have allowed for many different devices (old and new) to communicate in a wireless network at a declining cost. While some of these networks may consist purely of stationary devices, mobility is the primary advantage of wireless communication. Thus the underlying mechanisms that dictate how a packet is sent from one device to another should reflect not only our understanding of how wireless mobile devices operate, but also our desire for optimal performance. The representation of networks as geometrical graphs provides the foundation for ingenuity in routing protocols. Graphs provide insight into both the optimal aspects of a routing algorithm as well as its limitations. To this end, a thorough examination of several routing algorithms along with their inherent structures and optimality aspects will be presented, beginning with the classical approach in static networks and ending with methods used in homogenous wireless networks.
2. Classical Approaches
- While it will be shown that the following static routing algorithms are not appropriate for wireless networks in general, the underlying methods and objectives provide the foundation to which several effective routing protocols are based on[1].
2.1. Link-State Protocol: Dijkstra’s Algorithm
- The algorithm presented below produces the shortest path from a source
 to all possible destinations
to all possible destinations  on a directed graph
on a directed graph  with non-negative edge weights
with non-negative edge weights  . Its implementation in networking is known as a link-state algorithm[2, 3]. Let
. Its implementation in networking is known as a link-state algorithm[2, 3]. Let  denote the number of nodes in the graph. Let
denote the number of nodes in the graph. Let  be the total weight of the shortest path from the source
be the total weight of the shortest path from the source  to destination
to destination  . Let
. Let  be the cost of routing from
be the cost of routing from  to
to  (i.e., the sum of all edge weights along the path from
(i.e., the sum of all edge weights along the path from to
to  . Finally, let
. Finally, let  contain the vertices in
contain the vertices in  whose shortest paths have been determined.Algorithm
whose shortest paths have been determined.Algorithm  Input: a graph
Input: a graph  (represented by an adjacency list), non-negative edge weights
(represented by an adjacency list), non-negative edge weights  , and source
, and source  .Output: weight of shortest path from source
.Output: weight of shortest path from source  to all destinations
to all destinations  .
.







 The structure of the above algorithm comes from[2], while a more detailed analysis of its functionality and correctness is outlined in[3]. Lines 6 through 9 are known as relaxing an edge. A total of
The structure of the above algorithm comes from[2], while a more detailed analysis of its functionality and correctness is outlined in[3]. Lines 6 through 9 are known as relaxing an edge. A total of  edges are relaxed, each requiring
edges are relaxed, each requiring  computations, which results in an overall complexity of
computations, which results in an overall complexity of  . The implementation of a binary heap for the priority queue improves the relaxation computation to
. The implementation of a binary heap for the priority queue improves the relaxation computation to  and thus the overall complexity to
and thus the overall complexity to  .Regardless, the implementation of link-state protocols generally requires global state information from the graph. That is, the topology and link-costs are known to every node, which culminates in one exhaustive routing table that is maintained between all nodes. Hence a small change in the topology of the system can propagate into large errors in the routing table. Even with the available global state information, routing loops can still occur; for instance when two nodes
.Regardless, the implementation of link-state protocols generally requires global state information from the graph. That is, the topology and link-costs are known to every node, which culminates in one exhaustive routing table that is maintained between all nodes. Hence a small change in the topology of the system can propagate into large errors in the routing table. Even with the available global state information, routing loops can still occur; for instance when two nodes  and
and  attempt to route through each other to get to a destination
attempt to route through each other to get to a destination  . An example of this event will be provided in the next section, as the directed distance vector routing protocol is also sensitive to changes in topology. Thus the use of Dijkstra’s algorithm in wireless ad hoc networks is ill suited due to its static nature, time-complexity, and the overhead requirements it imposes on a network by requiring global state information.
. An example of this event will be provided in the next section, as the directed distance vector routing protocol is also sensitive to changes in topology. Thus the use of Dijkstra’s algorithm in wireless ad hoc networks is ill suited due to its static nature, time-complexity, and the overhead requirements it imposes on a network by requiring global state information.2.2. Directed Distance Protocol: The Bellman-Ford Algorithm
- The directed distance-vector routing protocol is nearly identical to the Bellman-Ford algorithm – but with one modification: the relaxation phase uses an infinite while loop in order to achieve a quiescent state that responds to link-cost changes or updated distance vectors[2].A major distinction between link-sate and directed distance-vector routing algorithms is the amount of information that is available to a given node in a network. The algorithm below uses localized information of a source to calculate the distance vector to each of its neighbours. Once each node has calculated its distance-vector, it is broadcasted to each of their respective neighbours. The result is a minimum weight-spanning tree.Algorithm
 Input: a graph
Input: a graph  (represented by an adjacency list), edge weights
(represented by an adjacency list), edge weights  , and source
, and source  .Output: weight of shortest path from source
.Output: weight of shortest path from source  to all destinations
to all destinations  .
.




 7. while (there exists a link cost change or updated distance vector to some adjacent
7. while (there exists a link cost change or updated distance vector to some adjacent  )9. do: for all
)9. do: for all  ,
,



 Figure 1 illustrates how the Bellman-Ford algorithm produces the shortest path in the given graph with A as the source. Figure 2 exemplifies the distributive and asynchronous nature of the algorithm where each node maintains its own routing table and sends updated distance vectors to neighbouring nodes.Note that the purpose of lines 14 to 16 is to check for negative weight cycles within the graph. This may be unnecessary if all edge weights are non-negative, but depending on what the routing costs are representing, negative weights may be unavoidable. For instance, they might signify the load carried or removed from a packet as it travels from a source to a destination. It is simply one of many preventative measures against routing loops. Unfortunately, the Bellman-Ford algorithm can converge very slowly, and despite its ability to accept changes in topology it is prone to routing loops. An example of how a link-cost change can result in a routing loop is shown in Figure 3.[2]
Figure 1 illustrates how the Bellman-Ford algorithm produces the shortest path in the given graph with A as the source. Figure 2 exemplifies the distributive and asynchronous nature of the algorithm where each node maintains its own routing table and sends updated distance vectors to neighbouring nodes.Note that the purpose of lines 14 to 16 is to check for negative weight cycles within the graph. This may be unnecessary if all edge weights are non-negative, but depending on what the routing costs are representing, negative weights may be unavoidable. For instance, they might signify the load carried or removed from a packet as it travels from a source to a destination. It is simply one of many preventative measures against routing loops. Unfortunately, the Bellman-Ford algorithm can converge very slowly, and despite its ability to accept changes in topology it is prone to routing loops. An example of how a link-cost change can result in a routing loop is shown in Figure 3.[2]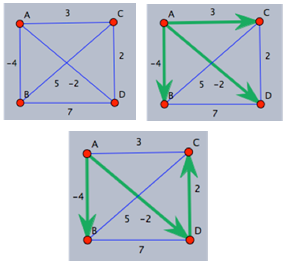 | Figure 1. Bellman-Ford algorithm applied to the graph on nodes  with as the source. The green arrows represent the shortest path from with as the source. The green arrows represent the shortest path from  to all other nodes. The change in shortest path reflects the iterative updates in distance vectors to all other nodes. The change in shortest path reflects the iterative updates in distance vectors |
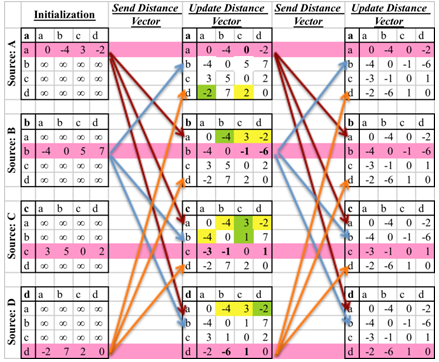 | Figure 2. Routing tables associated with the graph in Figure 1. Arrows indicate the forwarding of distance vectors to adjacent vertices. Highlighted cells indicate the detection of new shortest paths derived from recently updated distance vectors |
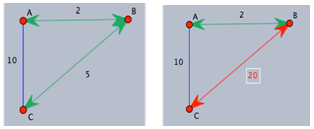 | Figure 3. Example of how a link-cost change can result in a routing loop |
 . When A receives the updated distance vector from B, it will now believe that a direct path from B to C does not exist and will therefore route to C directly (as it would have all along if global state information was available).While localized information certainly decreases the overhead costs of routing protocols, it enables errors to propagate from node to node. Despite the existence of preventative measures such as adding poisoned reverse, Dijkstra's algorithm and the Bellman-Ford algorithm are neither robust nor computationally efficient enough to handle the dynamic nature of wireless ad hoc networks. In order to formulate routing protocols that are appropriate for these purposes, desirable structures will be analysed next.
. When A receives the updated distance vector from B, it will now believe that a direct path from B to C does not exist and will therefore route to C directly (as it would have all along if global state information was available).While localized information certainly decreases the overhead costs of routing protocols, it enables errors to propagate from node to node. Despite the existence of preventative measures such as adding poisoned reverse, Dijkstra's algorithm and the Bellman-Ford algorithm are neither robust nor computationally efficient enough to handle the dynamic nature of wireless ad hoc networks. In order to formulate routing protocols that are appropriate for these purposes, desirable structures will be analysed next.3. Structures of Wireless Ad Hoc Networks
- The remainder of the algorithms to be presented are known to work in planar, connected, unit distance wireless graphs. First, a justification for modeling wireless ad-hoc networks in unit distance graphs will be outlined, followed by localized methods to extract planar sub graphs.
3.1. Unit Distance Wireless Graphs
- Let
 be a set of
be a set of  points in the Euclidean plane. The unit distance wireless graph of
points in the Euclidean plane. The unit distance wireless graph of  contains all
contains all  points, and edges
points, and edges  such that the distance between
such that the distance between  and
and  is within 1 unit
is within 1 unit  [4]. An example of a
[4]. An example of a  on a set of 6 points is illustrated in Figure 4.The reasoning behind using
on a set of 6 points is illustrated in Figure 4.The reasoning behind using  to model wireless networks stems from the concept of broadcast ranges. That is, wireless devices are limited in their ability to communicate with other devices in accordance to their broadcast range. In the
to model wireless networks stems from the concept of broadcast ranges. That is, wireless devices are limited in their ability to communicate with other devices in accordance to their broadcast range. In the  , all broadcast ranges are assumed to be uniform, hence
, all broadcast ranges are assumed to be uniform, hence  can send a packet directly to
can send a packet directly to  if and only if
if and only if  is contained within the circle of radius 1 centered at
is contained within the circle of radius 1 centered at  .Finally, it is entirely reasonable to assume that a wireless device has knowledge of its co-ordinates due to the wide use of Global Positioning Systems.
.Finally, it is entirely reasonable to assume that a wireless device has knowledge of its co-ordinates due to the wide use of Global Positioning Systems.3.2. Gabriel Graphs
- Consider a set of
 points in the Euclidean plane
points in the Euclidean plane  . The Gabriel circle
. The Gabriel circle  of two points
of two points  is defined as the circle that passes through both points and has the segment
is defined as the circle that passes through both points and has the segment  as a diameter, with the condition that no other point
as a diameter, with the condition that no other point  from
from  lies within
lies within  .
.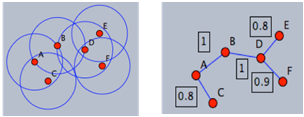 | Figure 4. of a set of 6 points:  . Each circle has a radius of 1 unit . Each circle has a radius of 1 unit |
 ,
,  , consists of all
, consists of all  points and edges
points and edges  such that
such that  exists[5]. Figure 5 demonstrates the construction of the Gabriel graph on 3 points.
exists[5]. Figure 5 demonstrates the construction of the Gabriel graph on 3 points.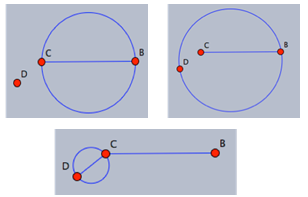 | Figure 5. Gabriel Graph of a set of 3 points:  |
 such that the Gabriel graph
such that the Gabriel graph  is non-planar. Then there exists at least one edge intersection between two edges
is non-planar. Then there exists at least one edge intersection between two edges  and
and  . Since
. Since  is a Gabriel edge it follows that neither
is a Gabriel edge it follows that neither  nor
nor  lies inside
lies inside  . Then regardless of the position of
. Then regardless of the position of  or
or  outside of
outside of , the circle
, the circle  will contain at least one of the points
will contain at least one of the points  or
or  . But then
. But then  cannot be a Gabriel edge, which contradicts the supposition. Therefore, the Gabriel graph on a set of points
cannot be a Gabriel edge, which contradicts the supposition. Therefore, the Gabriel graph on a set of points  is always planar. Figure 6 illustrates the proof of the Gabriel graph’s planarity.Finally, given a connected
is always planar. Figure 6 illustrates the proof of the Gabriel graph’s planarity.Finally, given a connected  on a set of points
on a set of points  , the intersection of
, the intersection of  and
and  results in a connected planar subgraph
results in a connected planar subgraph  [5].To prove the connectedness of
[5].To prove the connectedness of  , suppose that
, suppose that  is connected and
is connected and  is disconnected.Then there exists points
is disconnected.Then there exists points  such that they are adjacent in
such that they are adjacent in  but not adjacent in
but not adjacent in  . This necessitates the existence of a third point
. This necessitates the existence of a third point  such that
such that  lies within the Gabriel circle
lies within the Gabriel circle  . But then
. But then 
 and
and  . Hence there are edges
. Hence there are edges  and
and  resulting in a path from
resulting in a path from  to
to  in
in  (which contradicts the above supposition). Therefore if
(which contradicts the above supposition). Therefore if  is connected, then
is connected, then  is connected as well[5].It follows that a connected planar subgraph can be extracted from any connected
is connected as well[5].It follows that a connected planar subgraph can be extracted from any connected  by having each node in the graph check for the existence of Gabriel circles between itself and its neighbours. Thus, there exists a localized method to extract planar subgraphs which can be accomplished for each point
by having each node in the graph check for the existence of Gabriel circles between itself and its neighbours. Thus, there exists a localized method to extract planar subgraphs which can be accomplished for each point  in
in  time, where
time, where  is the number of neighbouring nodes to
is the number of neighbouring nodes to  [5].
[5]. 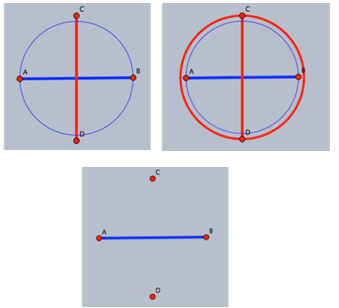 | Figure 6. Planarity of the Gabriel graph on a set of 4 points:  |
3.3. Delaunay Graphs
- The Delaunay graph is an excellent structure to have within networks as it contains every Gabriel edge. Although the relative neighbourhood graph will not be discussed in this paper, it is worth mentioning that the Gabriel graph contains the relative neighbourhood graph as a subgraph, and the relative neighbourhood graph contains the minimum spanning tree as a subgraph. Hence the Delaunay graph contains many valuable structures as subgraphs. Finally the connectedness and planarity of the Delaunay graph and all its subgraphs can be derived from the idea of “forbidden zones” (e.g., the Gabriel circle between any two points is a forbidden zone for any other point) and using the relationships between the above-mentioned structures. However, this is beyond the scope of this paper and will be left for the interested reader as an exercise. Before defining the Delaunay graph of a set of points
 , we must define the convex hull. The convex hull of a set of points
, we must define the convex hull. The convex hull of a set of points  is the smallest enclosing polygon
is the smallest enclosing polygon  comprising of all points
comprising of all points  with the condition that every line
with the condition that every line  is completely contained within
is completely contained within  [6].The Delaunay graph
[6].The Delaunay graph  partitions the convex hull into disjoint triangles with the condition that the circumcircle of each triangle does not contain any other point in
partitions the convex hull into disjoint triangles with the condition that the circumcircle of each triangle does not contain any other point in .
.  is uniquely defined if no 4 points are co-circular[5].
is uniquely defined if no 4 points are co-circular[5]. is dual to the Voronoi diagram which divides the plane into
is dual to the Voronoi diagram which divides the plane into  disjoint regions. Each region is defined by a point
disjoint regions. Each region is defined by a point  such that anything within the region is closer to
such that anything within the region is closer to  than any other point
than any other point  . The Voronoi diagram can be computed in
. The Voronoi diagram can be computed in  time; therefore, due to its duality,
time; therefore, due to its duality,  can be calculated in the same time[6].It has been suggested in[5] to force a wireless network to contain the Delaunay graph by either increasing the transmission rates of the wireless devices or by deploying more radio stations.
can be calculated in the same time[6].It has been suggested in[5] to force a wireless network to contain the Delaunay graph by either increasing the transmission rates of the wireless devices or by deploying more radio stations.4. Routing in Wireless Ad-Hoc Networks
- There are many approaches to routing in wireless ad-hoc networks. An absolute necessity in employable routing protocols is the guaranteed delivery of packets to their destination. Compass Routing and Face Routing can guarantee delivery in certain geometric structures as outlined below.
4.1. Compass Routing
- Given a planar
 on a set of points
on a set of points  in the Euclidean plane, suppose that a point
in the Euclidean plane, suppose that a point  intends to send a packet to a destination
intends to send a packet to a destination  (Note if
(Note if  is non-planar, then compute
is non-planar, then compute  ). The forwarding packet must maintain the location of its: current position
). The forwarding packet must maintain the location of its: current position  , destination
, destination , and all nodes
, and all nodes  adjacent to
adjacent to  .Algorithm
.Algorithm  Input: the location of a packet’s: current position
Input: the location of a packet’s: current position  , destination
, destination  , and adjacent nodes
, and adjacent nodes  .Output: arrival of packet at its destination1. Forward packet to neighbour
.Output: arrival of packet at its destination1. Forward packet to neighbour  such that the slope of
such that the slope of  is closest to
is closest to  amongst all
amongst all  2. if
2. if  3. then report arrival of packet at destination, break4. else
3. then report arrival of packet at destination, break4. else  Figure 7 illustrates how this recursive algorithm would proceed on a graph of 8 nodes. Nevertheless, Compass routing is known to work on Delaunay graphs that are uniquely defined, but is still prone to routing loops in graphs with low convexity, and can even fail in convex graphs[5].
Figure 7 illustrates how this recursive algorithm would proceed on a graph of 8 nodes. Nevertheless, Compass routing is known to work on Delaunay graphs that are uniquely defined, but is still prone to routing loops in graphs with low convexity, and can even fail in convex graphs[5].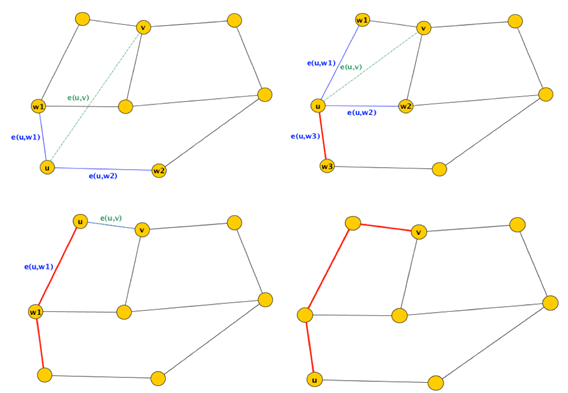 | Figure 7. Forwarding of a packet from to its destination using Compass routing in the given graph of 8 nodes |
 where
where  and
and  are the neighbours of
are the neighbours of  that minimize the clockwise and counter-clockwise angle between all
that minimize the clockwise and counter-clockwise angle between all  and
and  . The packet could theoretically take a very long time to arrive at its destination but in practice, randomized compass routing performs well[5].
. The packet could theoretically take a very long time to arrive at its destination but in practice, randomized compass routing performs well[5].4.2. Face Routing
- Just as the name suggests, face routing considers the disjoint regions induced on the plane by the edges of the
 on a set of points
on a set of points , wherein some edges are considered to appear twice (namely the edge shared between two traversed faces). In addition to a distance
, wherein some edges are considered to appear twice (namely the edge shared between two traversed faces). In addition to a distance  (initially set to 0), a packet must maintain the locations of: its origin
(initially set to 0), a packet must maintain the locations of: its origin , an intermediate point
, an intermediate point  , the destination
, the destination  , and the previous two nodes visited
, and the previous two nodes visited  and
and . This last requirement helps prevent the occurrence of routing loops[4].
. This last requirement helps prevent the occurrence of routing loops[4]. Input: distance
Input: distance  (initially set to 0), and the locations of: its origin
(initially set to 0), and the locations of: its origin  , a point
, a point  (initially set to
(initially set to ), the destination
), the destination  , and the previous two nodes visited
, and the previous two nodes visited  and
and  (initially set to null)Output: arrival of packet to its destination
(initially set to null)Output: arrival of packet to its destination  1. determine the face
1. determine the face  , incident to
, incident to  that is intersected by the line
that is intersected by the line  2. begin the traversal of
2. begin the traversal of  , updating
, updating  and
and  after each edge traversal3. if packet arrives at
after each edge traversal3. if packet arrives at  4. then report arrival of packet at destination 6. else upon intersecting the line
4. then report arrival of packet at destination 6. else upon intersecting the line , calculate the distance
, calculate the distance  from u to this intersection point
from u to this intersection point 

 9. upon arriving back at
9. upon arriving back at  traverse
traverse  until
until  has been reached
has been reached Refer to Figure 8 for a simulation of face routing on the given graph of 17 nodes.Out of all the algorithms presented, face routing is by far the most robust as it is known to work on all planar networks. Due to the constant amount of memory of the packet, the algorithm handles changes in topology very well. For instance if one of the nodes along the path from
Refer to Figure 8 for a simulation of face routing on the given graph of 17 nodes.Out of all the algorithms presented, face routing is by far the most robust as it is known to work on all planar networks. Due to the constant amount of memory of the packet, the algorithm handles changes in topology very well. For instance if one of the nodes along the path from  to
to  stops transmitting its signal, the packet and its forwarding method is unaffected unless the packet resides at the failed node in question. If this is the case then the packet of will not reach its destination since only one copy of the packet is forwarded from node to node. Aside from this scenario, a packet is also subject to routing loops if a node along the path from
stops transmitting its signal, the packet and its forwarding method is unaffected unless the packet resides at the failed node in question. If this is the case then the packet of will not reach its destination since only one copy of the packet is forwarded from node to node. Aside from this scenario, a packet is also subject to routing loops if a node along the path from  to
to  continually fails and recovers during a face traversal; but this is a highly degenerate case. Finally, each of the edges of a given face is traversed at most twice[4].
continually fails and recovers during a face traversal; but this is a highly degenerate case. Finally, each of the edges of a given face is traversed at most twice[4].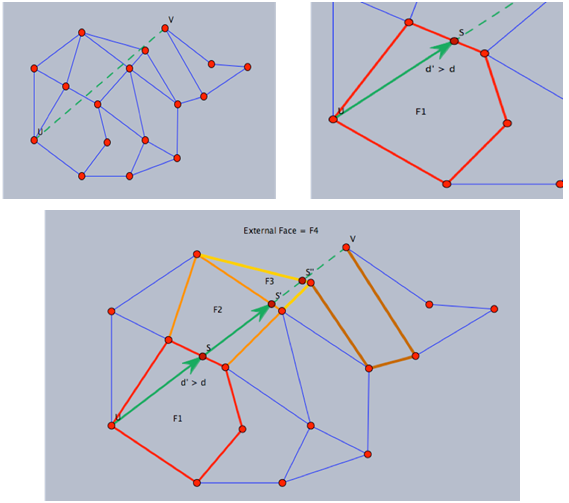 | Figure 8. Face routing on a graph of 17 nodes. Non-blue edges indicate an edge traversal. In this scenario, 4 faces are traversed in total (including the external face) in order to deliver a packet from  to to  |
5. Conclusions
- At first glance it would appear that the link-state and distance-vector routing protocols are ill suited for wireless ad-hoc networks, but the majority of heuristic protocols used are largely influenced by their methodologies[1]. What is highly undesirable of these methods is the overhead costs associated with maintaining routing table(s).The unit distance wireless graph is a good representation of wireless ad hoc networks in which the wireless devices all have a uniform broadcast range. Of course, there are many cases in which broadcast ranges are not uniform, and there are often environmental factors that can inhibit a transmitter’s signal strength. However this model provides the foundation to which compass routing and more importantly face routing can guarantee delivery.It was suggested in[4] that since nodes within a unit distance wireless graph generally have relatively few adjacent nodes, the greedy quadratic time algorithms are better suited for determining incident edges, as their implementation is simpler. However, the robustness and scalability of face routing is undeniable and should at least be employed as an alternative routing protocol when routing loops persist within a system.Many other on-demand routing protocols like face routing and compass routing require methods to extract planar subgraphs. This paper discussed only the use of the intersection of the Gabriel graph and the unit distance wireless graph
 as an alternative to the greedy approach. The relative neighbourhood graph
as an alternative to the greedy approach. The relative neighbourhood graph  is another nice geometric structure that can be derived in the same amount of time and is equally useful in the formation of localized routing algorithms[2, 6].
is another nice geometric structure that can be derived in the same amount of time and is equally useful in the formation of localized routing algorithms[2, 6].ACKNOWLEDGEMENTS
- Dr. Vassilev’s research is supported by NSERC Discovery Grant.