-
Paper Information
- Next Paper
- Previous Paper
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
Computer Science and Engineering
p-ISSN: 2163-1484 e-ISSN: 2163-1492
2011; 1(2): 36-42
doi: 10.5923/j.computer.20110102.07
PID Type Stabilizer Design for Multi Machine Power System Using IPSO Procedure
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-Text HTML
Full-Text HTMLHossein Shayeghi 1, Ali Ghasemi 1, Heidarali Shayanfar 2
1Technical Engineering Department, University of Mohaghegh Ardabili, Ardabil, Iran
2Electrical Engineering Department, Iran University of Science and Technology, Tehran, Iran
Correspondence to: Hossein Shayeghi , Technical Engineering Department, University of Mohaghegh Ardabili, Ardabil, Iran.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
This paper presents a modified Iteration Particle Swarm Optimization (IPSO) algorithm to tune optimal gains of a Proportional Integral Derivative (PID) type multiple stabilizers and non-smooth nonlinear parameters (such as saturation limits) for multi machine power system, simultaneously. The problem of robustly tuning of PID based multiple stabilizer design is formulated as an optimization problem according to the time domain-based objective function which is solved by a modified strategy of PSO algorithm called IPSO technique that has a strong ability to find the most optimistic results. In the proposed algorithm, a new index named, Iteration Best, is incorporated in standard Particle Swarm Optimization (PSO) to enrich the searching behavior, solution quality and to avoid being trapped into local optimum. To demonstrate the effectiveness and robustness of the proposed stabilizers, the design process takes a wide range of operating conditions and system configuration into account. The effectiveness of the proposed stabilizer is demonstrated through nonlinear simulation studies and some performance indices on a four- machine two areas power system in comparison with the classical PSO and PSO with Time-Varying Acceleration Coefficients (PSO-TVAC) based optimized PID type stabilizers. The results of these studies show that the proposed IPSO based optimized PID type stabilizers have an excellent capability in damping power system inter-area oscillations and enhance greatly the dynamic stability of the power system for a wide range of loading condition. Also, it is superior that of the PSO and PSO-TVAC based tuned stabilizers in terms of accurateness, convergence and computational effort.
Keywords: Power System Stabilizer Design, IPSO, PID, Dynamic Stability, Multi-machine Power Systems
Cite this paper: Hossein Shayeghi , Ali Ghasemi , Heidarali Shayanfar , "PID Type Stabilizer Design for Multi Machine Power System Using IPSO Procedure", Computer Science and Engineering, Vol. 1 No. 2, 2011, pp. 36-42. doi: 10.5923/j.computer.20110102.07.
Article Outline
1. Introduction
- Damping of small signal oscillations in power systems is a main problem that has been challenging engineers for years. These oscillations may be very poorly damped in some cases, resulting in mechanical fatigue at the machines and unacceptable power variations the across the important transmission lines. For this reason, the applications of the controllers to provide better damping for these oscillations are of utmost importance[1]. The goal of the electromechanical oscillations in power systems in an interconnected power system is to maintain the frequency and to damp small signal oscillations at short time so as to accommodate fluctuating load demands. By the development of interconnection of large electric power systems, there have been spontaneous system oscillations at very low frequencies in order of 0.2-3.0 Hz. In some cases, they continue to grow and presented a limitation on the amount of the power to be transmitted within the system if no adequate damping is available [1]. Power System Stabilizers (PSSs) are auxiliary control devices on synchronous generators, used in conjunction with their excitation systems to provide control signals toward enhancing the system damping of low frequency oscillations associated with the electromechanical modes and extend power transfer limits; thus maintaining reliable operation of the power system[2].The conventional lead-lag compensators have been widely used as the PSSs. However, the problem of PSS parameter tuning is a complex exercise. These stabilizers have previously tuned both single and multiple operation points of the power system using various methods. The approaches used to the problem of PSS parameters tuning range from modern control theory[2-5], to the more recent one using many random heuristic techniques, such as like honey bee optimization technique[6], artificial bee colony search[7], chaotic optimization algorithm[8], genetic algorithm[9], rule based bacteria foraging[10] and strength Pareto evolutionary algorithm[11] for achieving high efficiency and search global optimal solution in the problem space. Recently, the classical PSO based method[12, 13] has been represented to optimize of PSS parameters. The potential of this method was shown for PSS designing to improve low frequency oscillations damping at different operating conditions than the GA approach on a multi-machine power system. An Improved PSO with Time Varying Acceleration Coefficients (PSO-TVAC) has been undertaken to solve the PSS design problem by Shayeghi et al.[14] to improve the global search in the early stage of the optimization process and cheering the particles to converge toward the global optima at the end of it for effectively enhancement the convergence rate and the accuracy of the classical PSO. Using the numerical results it was shown that PSO-TVAC technique has better convergence property and can get superior low frequency oscillations than the classical one.Despite the potential of the modern control techniques with different structure, Proportional Integral Derivative (PID) type controller is still widely used for industrial applications such as power systems control[15-17]. This is because it performs well for a wide class of process. Also, they give robust performance for a wide range of operating conditions and easy to implement. On the other hand, Shayeghi and Esmailnezhad[15] presented a comprehensive analysis of the effects of the different PID controller parameters on the overall dynamic performance of the PSS problem. It is shown that the appropriate selection of PID controller parameters results in satisfactory performance during system upsets. Thus, the optimal tuning of a PID gains is required to get the desired level of robust performance. Since optimal setting of PID controller gains is a multimodal optimization problem (i.e., there exists more than one local optimum) and more complex due to nonlinearity, complexity and time-variability of the real world power systems operation. Hence, local optimization techniques, which are well elaborated upon, are not suitable for such a problem. In order to overcome these drawbacks, a novel Iteration Particle Swarm Optimization (IPSO) technique is proposed for the optimal tune of the multiple PID type stabilizers in this paper to achieve desired level of low frequency oscillations damping and enhance dynamic stability of the multi machine power system. It should be noted that the performance of the classical PSO greatly depends on its parameters adjustments, and it often suffers the problem of being trapped in the local optima so as to be premature convergence. For this reason, in the proposed algorithm, a new term named, iteration best is incorporated in classical PSO to enrich the searching behavior, solution quality and to avoid being trapped into local optimum. The effectiveness of the proposed PID type stabilizer is tested on a multi-machine power system under different operating conditions in comparison with the PSO and PSO-TVAC[14] based tuned stabilizers through nonlinear time domain simulation and some performance indices. The simulation results reveal the robust performance of the proposed method for damping low frequency oscillations than the PSO, and PSO-TVAC one tuned PSS such that the relative stability is guaranteed and the time domain specifications concurrently secured. This presents a useful promising tool to choose enviable stabilizer from a set of optimally tuned PID type PSSs for the system operator, PSS manufacturer and customers.
2. Power System Modeling
- A four-machine, two-area study system, shown in Fig. 1, is considered for the damping control design. Each area consists of two generator units. The rating of each generator is 900 MVA and 20 kV. Each of the units is connected through transformers to the 230 kV transmission line. There is a power transfer of 400 MW from Area 1 to Area 2. The detailed bus data, line data, and the dynamic characteristics for the machines, exciters, and loads are given in[18]. The loads are modeled as constant impedances. For the power system stability analysis a sufficient mathematical models considering a set of nonlinear differential-algebraic equations by assembling the models for each generator, load and other devices such as controls in the system is required. The two-axis model (fourth order)[2] given in is used for the time domain simulations study for each machine. The loads are modeled as constant impedances. A first order model of a static type automatic voltage regulator was used. Nonlinear dynamic equations of the each machine can be summarized as follows:
 | (1) |
 | (2) |
 | (3) |
 | (4) |
 | (5) |
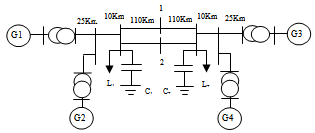 | Figure 1. Single line diagram of a two area system |
2.1. PSS Structure
- The operating function of a PID type PSS is to produce a proper torque on the rotor of the machine involved in such a way that the phase lag between the exciter input and the machine electrical torque is compensated. The supplementary stabilizing signal considered is one proportional to speed. A widely speed based used PID is considered throughout the study[2]. The transfer function of the ith PID type stabilizer is given by:
 | (6) |
3. Iteration PSO Algorithm
3.1. Classical PSO Review
- The PSO is a population-based method and is described by its developers as an optimization paradigm, which models the social behavior of the birds flocking or fish schooling for food. Therefore, PSO works with a population of potential solutions rather than with a single individual[12].In the PSO technique a number of simple entities, the particles, are placed in the search space of some problem or function, and each evaluates the objective function at its current location. Each particle then determines its movement through the search space by combining some aspect of the history of its own current and best locations by those of one or more members of the swarm with some random perturbations. The next iteration takes place after all particles have been moved. Eventually the swarm as a whole, like a flock of birds collectively foraging for food, is likely to move close to an optimum of the fitness function[19].In the PSO, the trajectory of each individual in the search space is adjusted by dynamically altering the velocity of each particle, according to its own flying experience and the flying experience of the other particles in the search space. The position and velocity vectors of the ith particle in the D-dimensional search space can be represented as Xi = (xi1; xi2; …; xid) and Vi = (vi1; vi2;…; vid), respectively. According to a user defined fitness function, let us assume that the best position of each particle, which corresponds to the best fitness value (Pbest) obtained by that particle at time, be Pi = (pi1; pi2; …; pid), and the global version of the PSO keeps track of the overall best value (Gbest), and its location, obtained thus far by any particle in the population. Then, the new velocities and the positions of the particles for the next fitness evaluation are calculated using the following two equations[12]:
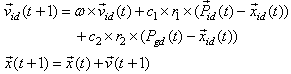 | (7) |
 | (8) |
3.2. Iteration PSO Procedure
- In this paper, a new index named, Iteration Best, is incorporated in Eq. (7) to enrich the searching behavior, solution quality and to avoid being trapped into local optimum, IPSO technique is proposed, Eq. (9) shows the new form of Eq. (7)[20]:
 | (9) |
4. IPSO Based Stabilizer Design
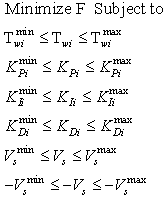
- This section describes how the IPSO algorithm is employed to tune nonlinear parameters (Vsmax and Vsmin) and PID type PSS parameters for the two-area multi-machine power system as shown in Fig. 1. Just like any other optimization problem, a cost function needs to be formulated to determine optimal parameters of multiple PSSs. The goal of optimal tuning of stabilizer parameters task is to maximize low frequency oscillation damping; i.e.: minimize the settling time and overshoots in system response. In order to get the PSS design task a cost function that minimizes the time domain based system response characteristics is used in this study. It can be defined as follows:
 | (10) |
 | (11) |
 | (12) |
|
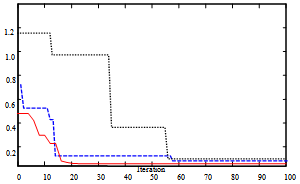 | Figure 2. Fitness convergence, Dotted (PSO), Dashed (PSO-TVAC) and Solid (IPSO) |
5. Simulation Results
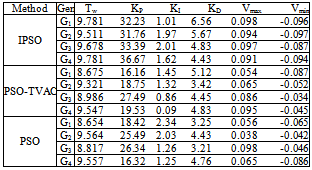
- The effectiveness and robustness of the performance of the proposed PID type stabilizer under transient conditions is verified by applying a three-phase fault of 100 ms duration at the middle of one of the transmission lines between bus-7 and bus-8. The fault is cleared by permanent tripping of the faulted line. To evaluate the performance of the proposed stabilizer design approach the response of the proposed PSS are compared with the response of the PSO and PSO-TVAC damping controller individual design. The inter-area and local mode of oscillations with the above stabilizers for deferent operating conditions as given in Table 1 is shown in Figs. 3-5, respectively. The performance of the IPSO based optimized multiple PID type stabilizer is quite prominent in comparison with the other PSSs and the overshoots and settling time are significantly improved with the proposed stabilizer.To illustrate robustness of the proposed method, some performance indices based on the system performance characteristics are defined as:
 | (13) |
 | (14) |
 | (15) |
 | (16) |
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
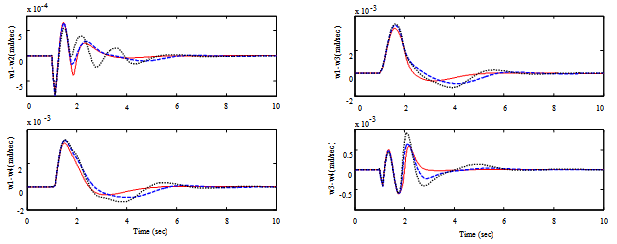 | Figure 3. Inter-area and local mode of oscillations for case 1: Dotted (PSO), Dashed (PSO-TVAC) and Solid (IPSO) |
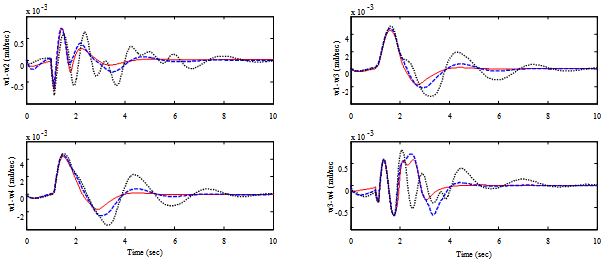 | Figure 4. Inter-area and local mode of oscillations for case 2: Dotted (PSO), Dashed (PSO-TVAC) and Solid (IPSO) |
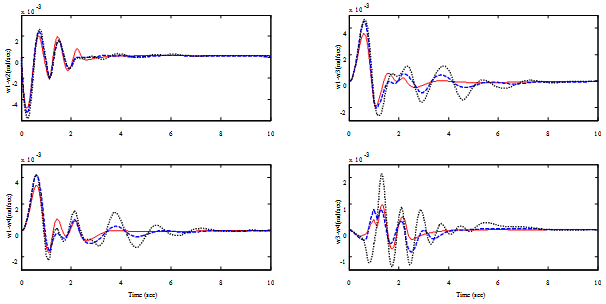 | Figure 5. Inter-area and local mode of oscillations for case 4: Dotted (PSO), Dashed (PSO-TVAC) and Solid (IPSO) |
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
5. Conclusions
- In this paper, a novel Iteration Particle Swarm Optimization (IPSO) algorithm has been successfully applied to the robust design of multiple PID type stabilizers to improve damping of the low frequency oscillation in the multi machine power system. The design problem of the robustly selecting stabilizer parameters is converted into an optimization problem according to time domain-based objective function over a wide range of operating conditions that is solved by the IPSO technique. It has stronger global search ability and more robust than PSO and PSO-TVAC heuristic methods. The effectiveness of the proposed strategy was tested on a two-area four machine power system under different operating conditions. The nonlinear time-domain simulation results demonstrate the effectiveness of the proposed PID type stabilizers and their ability to provide good damping of low frequency oscillations. The system performance characteristics in terms of ‘ITAE’, ‘IAE’, ‘ISE’ and ‘FD’ indices reveal that the proposed IPSO algorithm is superior that of the PSO and PSO-TVAC in terms of accuracy and computational effort.
Appendix: Numenclature
References
| [1] | A. Safari, R. Jahani, M. Hajinasiri, A.H. Araskalaei and H.A. Shayanfar, “COA based coordinated design of FACTs and PSS output feedback controllers”, International Review of Electrical Engineering, vol. 21, pp. 2803-2808, 2010. |
| [2] | K. R. Padiyar, “Power System Dynamics, Stability and Control”. Second Ed., 2008. |
| [3] | D.K. Chaturvedi and O.P. Malik, “Experimental studies of a generalized neuron based adaptive power system stabilizer”, Applied Soft Computing, vol. 11, pp. 149-155, 2007. |
| [4] | J. Fraile-Ardanuy and P.J. Zufiria, “Design and comparison of adaptive power system stabilizers based on neural fuzzy networks and genetic algorithms”, Neurocomputing , vol. 70, pp. 2902-2912, 2007. |
| [5] | R. Segal, A. Sharma and M.L. Kothari, “A self-tuning power system stabilizer based on artificial neural network”, Electrical Power and Energy Systems, vol. 26, pp. 423-30, 2004. |
| [6] | H. Shayeghi, H. A. Shayanfar, A. Akbarimajd and A. Ghasemi," PSS design for a single-machine power system using honey bee mating optimization", In: Proceedings of the International Conference on Artificial Intelligence, Las Vegas, USA, pp. 210-216, 2011. |
| [7] | H. Shayeghi, H.A. Shayanfar and A. Ghasemi, “A robust ABC based PSS design for a SMIB power system” International Journal on Technical and Physical Problems of Engineering vol. 3, pp. 86-92, 2011. |
| [8] | H. Shayeghi, H.A. Shayanfar, S. Jalilzadeh and A. Safari, “Multi-machine power system stabilizers design using chaotic optimization algorithm”, Energy Conversion and Management, vol. 51, pp. 1572-1580, 2010. |
| [9] | M. Eslami, H. Shareef, A. Mohamed and M. Khajehzadeh, “Damping of power system oscillations using genetic algorithm and particle swarm optimization”, International Review of Electrical Engineering, vol. 5, pp. 2745-2753, 2010. |
| [10] | S. Mishra, M. Tripathy and J. Nanda, “Multi-machine power system stabilizer design by rule based bacteria foraging", Electric Power Systems Research, vol. 77, pp. 1595-1607, 2007. |
| [11] | Y. Yassami, A. Darabi and SMR Rafier, “Power system stabilizer design using strength Pareto multi objective optimization approach”, Electric Power Systems Research, vol. 80, pp. 839- 846, 2010. |
| [12] | H. Shayeghi, H.A. Shayanfar, A. Safari, R. Aghmasheh, “A robust PSSs design using PSO in a multimachine environment", Energy Conversion and Management, vol. 51, pp. 696-702, 2010. |
| [13] | M. Eslami, H. Shareef, A. Mohamed and S.P. Ghoshal, “Tuning of power system stabilizers using particle swarm optimization with passive congregation”, International Journal of the Physical Sciences, vol. 5, pp. 2574-2589, 2010. |
| [14] | H. Shayeghi, and A. Ghasemi, “Improved Time Variant PSO Based Design of Multiple Power System Stabilizer”, International Review of Electrical Engineering, vol. 22, (in press), 2011. |
| [15] | H. Shayeghi and B. Esmaeilnezhad, “PID controller design for power system stabilization”, Proc. Of the 7th International Conference on Technical and Physical Problems of Engineering, Lefkosa, TR Northern Cyprus, pp. 252-256, July 2011. |
| [16] | S. Duman and A. Öztürk , “Robust design of PID controller for power system stabilization by using real coded genetic algorithm”, International Review of Electrical Engineering, vol. 5, pp. 2159-2170, 2010. |
| [17] | H. Shayeghi and A. Ghasemi, “Market based LFC design using artificial bee colony”, International Journal on Technical and Physical Problems of Engineering, vol. 3, pp. 1-10, 2011. |
| [18] | P. Kundur, “Power System Stability and Control”, McGraw-Hill Inc., New York, 1994. |
| [19] | H. Shayeghi, A. Safari and H.A. Shayanfar, “PSS and TCSC damping controller coordinated design using PSO in multi-machine power system”, Energy Conversion and Management, vol. 51, pp. 2930-2937, 2010. |
| [20] | A. Safari and H. Shayeghi, “Iteration particle swarm optimization procedure for economic load dispatch with generator constraints”, Expert Systems with Applications, vol. 38, pp. 6043-6048, 2011. |