-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
Architecture Research
p-ISSN: 2168-507X e-ISSN: 2168-5088
2022; 12(2): 38-46
doi:10.5923/j.arch.20221202.02
Received: Jul. 15, 2022; Accepted: Aug. 8, 2022; Published: Aug. 30, 2022

Unmanned Aerial Vehicles for High-Density Residential Delivery
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLC. Martín-Gómez1, A. Zuazua-Ros1, J. Viejo1, E. Lacilla-Larrodé2, A. Shapiro3
1Universidad de Navarra, Department of Construction, Building Services and Structures, Pamplona, Spain
2Universidad de Navarra, Department of Design, Theory and Urbanism, Pamplona, Spain
3Department of Mechanical Engineering, Ben Gurion University of the Negev, Israel
Correspondence to: C. Martín-Gómez, Universidad de Navarra, Department of Construction, Building Services and Structures, Pamplona, Spain.
| Email: |  |
Copyright © 2022 The Author(s). Published by Scientific & Academic Publishing.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

The new technologies are reaching all the fields of our daily lives to improve our living standards. In this changeable period, a new concept of delivery is appearing. Unmanned Aerial Vehicles (UAV) delivery is already a reality, but how can this device be implemented in a high-density residential environment? This paper proposes a holistic delivery system with UAVs in urban environments where the façades can interact with the drones, allowing reception and delivery in the same house. The UAVs are controlled by a network that will enable constant communication. The façade integrates an element able to receive the package and preserve it, including control temperature, until the client arrives home. The most notable drawback of the UAVs is the flying hour limitation, so intermediate urban elements must be designed too. These elements will play the role of charging places, distribution points, and even cooling storage places. The self-sufficiency of these urban stations will be ensured by integrating photovoltaic panels and thermoelectric modules, responsible for both the energy consumption and the cooling/heating needs. The system implies a coordination challenge between several fields: electronics, informatics, UAVs, delivery companies, thermal control and architecture. The aim is to achieve an implemented delivery system that avoids traffic jams and pick-up points, facilitating the work for the enterprises involved and the clients, who would only have to install a final interface system in the façade.
Keywords: Architecture, UAV, Drone, Delivery, Interface, Façade
Cite this paper: C. Martín-Gómez, A. Zuazua-Ros, J. Viejo, E. Lacilla-Larrodé, A. Shapiro, Unmanned Aerial Vehicles for High-Density Residential Delivery, Architecture Research, Vol. 12 No. 2, 2022, pp. 38-46. doi: 10.5923/j.arch.20221202.02.
Article Outline
1. Introduction
- In this day and age, Unmanned Aerial Vehicles, commonly known as UAVs, are not anymore a tool exclusive to military use (Pedrozo, 2017), but rather, many fields have been introducing them into their technological endeavors (Wolf, 2017) such as mapping (Kalantar, 2017, Babahajiani, 2017), environment monitoring (Anweiler, 2017, Sudarshan, 2016), agriculture (López-Granados, 2016, Zainuddin, 2016), safety and security (Bravo, 2017, Uchida, 2014), the health sector (Kim, 2017, Crespo, 2017, Claesson, 2016) and transport (Scheneider, 2017, Kunze, 2016, Oubbati, 2017).The multiple possibilities of this new delivery concept to turn this technology into a promising developed area have made an exhaustive analysis of the integration of UAVs in this field (Balaban, 2017). However, this implementation presented two main drawbacks: the law limitations and the charge dependency of the UAVs (Dorling, 2017).The popularity of UAVs has increased considerably over the past couple of years. Still, regulations for this kind of vehicle find several difficulties (Cracknell, 2017) has to struggle with flights of different purposes, commercial and particular with all the related problems (Horsman, 2016). This research (Park, 2017) focuses on the trouble that comes with the appliance of regulations based on safety without considering the invasion of privacy. Other researchers proposed UAV zoning in urban environments Norzailawati, 2016). Security must be ensured; there is a severe concern about using UAVs in terrorism activities (Johnson, 2017). Furthermore, one of the main problems of implementing UAV-based activities in cities is the lack of legislation that, even when present, systematically denies any sort of rights to flights within urban areas, prioritizing civilian safety over this relatively new but unknown technology. Privacy concerns must not be ignored, as with this technology, the threat to behavioral privacy is more present than ever (Clarke, 2014).Several advantages of the UAVs, like their measures, flying speed, or ability to integrate or carry objects, are limited by their autonomy endurance, so the research is focused on finding a solution to this limitation.As visible from the information in figure 1, the components required for such an infrastructure, in one way or another, already exist: from spaces needed to charge and store UAVs (similar to the illustration in figure 2) to the optimal routing and scheduling of unmanned aircraft, and delivery trucks, in this new paradigm of parcel delivery (Murray, 2015), or even complex conceptualizations in limitations of current technologies which are systematically examined through consideration of state-of-the-art and future trends (Elbanhawi, 2017). With this data, the article focuses on the problem that encompasses the introduction of this technology into buildings' façades within an urban context.
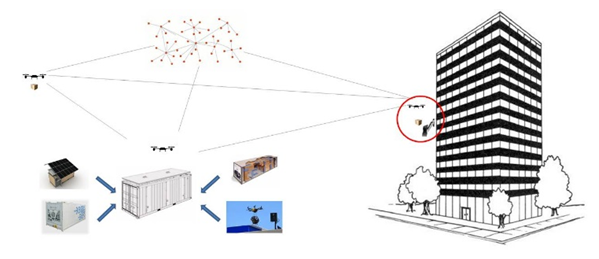 | Figure 1. Conceptual graphical abstract of the article shows the relations among the intermediate urban element, the delivery system (which could include heated spaces strategically placed within the city as intermediary stations for merchandise), and the façade element in charge of the delivery/reception |
 | Figure 2. The visible element in this urban context is currently used to manage solid waste, illustrated here as an example of the possible appearance and integration of intermediary stations for merchandise mentioned in figure 1 |
1.1. Objectives
- The main goal of this paper is to propose a holistic delivery system in high residential environments using UAVs, including the control temperature of the goods delivered/received. The development of this system is a great synergy challenge since several very different fields must work together: informatics, electronics, architects, engineers, delivery companies, etc. Each research sector must deal not only with the problem of its field but also with integrating all the solutions in a unique system that fits perfectly.Besides problems stemming from the use of UAVs that have been already explained, the system wants to solve other challenges.The first disruptive service that wants to be offered is delivering the package in the house. The secondary objective is to achieve the total grade of the clients' comfort, so they neither need to be at home when the package arrives nor leave their homes and go to a delivery point to get it. However, it is not always possible to land in a backyard; in fact, in Europe, the urban environments are characterized by their high density with tall construction, where only a few lucky occupants can enjoy a garden. In the EU, 42% of the people live in flats; this percentage is increased to 65,9% in Spain.It is necessary to design a façade to be a delivery point. The building must be able to interact with the UAV, using a structure that enables the UAV to land and keeps the package safely contained until the client retrieves it. This article approaches the interface problem that Field must solve field (Maier, 2016).The system and the UAVs (not only the UAVs themselves but also the network of UAVs) must maintain constant and uninterrupted communication between them to ensure the proper delivery of the package. This communication network is one of the project's challenges and an essential part of the application. There exists much research focused on this collaborative work between UAVs. This work (Lachow, 2017) makes an exhaustive analysis of the use of swarming UAVs. Other results focus on improving the retreat in case of communication failure (Kang, 2017) or ensuring safety collaboration (Okutake, 2016).
1.2. Methodology
- The integration of UAVs in cities is promising for its possibilities; however, a lot of designing and thinking must be done to make it possible. These reflections must be carried out from a multidisciplinary point of view, including policymakers, administration, urban planners, and the users within the buildings themselves. For this reason, the article poses a strategic approach to the problem's solution, offering an additional point of view without intending to serve as a security operative solution. In other words, firstly, the definition of the strategy to achieve what is intended must be formalized, and secondly, the design of the operative detail of how to carry it out.By the initial projections and ideas, the project would take form and be placed within the space where a window would be situated, making for a relaxed and almost intuitive approach to the user, as shown in figure 3.
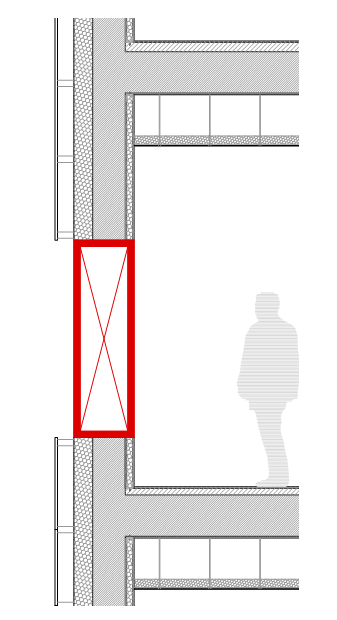 | Figure 3. Possible Placement in Façade |
2. About UAVs and Buildings
2.1. Context and State of the Art
- The idea of the drone is old (Austin, 2010, Newcome, 2004, Valavanis, 2015). Unmanned aircraft, in one form or another, have been used for decades. One of the first recorded uses was by the Austrians in July 1849 to bombard the city of Venice. In 1896 Samuel P. Langley developed a series of unmanned steam aircraft that were successfully moved along the Potomac River near Washington DC. The practice of aerial surveillance later arose in the Spanish-American War of 1898, when the US military equipped a camera with a kite, giving rise to one of the first aerial reconnaissance photographs. Thus, in the First World War, aerial surveillance was widely used. During the Second World War, the matter was treated differently since the technology by remote control was very limited. Nevertheless, the Vietnam War was undoubtedly essential in the historical development of drones to be what they are today. The conflict gave birth to the most sophisticated surveillance program with unmanned aircraft in aviation history.1970 was considered the right moment for remotely piloted vehicles (RPVs), generating a mixture of uneasiness, skepticism, and speculation about the future and confidence in aircraft without a pilot. With the deep development in computer and electronic control systems during the 80s and 90s, the present drones were taking shape.Since then, the 21st century has displayed the wide range of possibilities drones can bring to today's society. Until then, the drone has been perceived mainly as a tool for war purposes; however, currently, there are numerous non-military projects and services in the process. Some already work successfully, and others are in the development phase.One of the fields that currently use drones is mainly the fiction area. Cinema, advertising, and television are fields where drones already have their place. However, until mid-2016, the use of drones to make feature films was prohibited in the United States by federal authorities. Even so, drones have been used in sagas such as "Transformers," "Harry Potter," and "Skyfall" by James Bond, but they have always been used outside the country.However, in the field of reality, the use of drones depends on the legislation which is currently in development. There are many projects under development, and studying their implementation and impact on our society. In 2014 the first version of "Drones for Good" took place, a contest of ideas and experiences based on how to use these instruments to improve the quality of life called for the Arab Emirates. Nearly 800 projects from 57 countries were presented on a variety of topics.In this work (Berradi, 2016), an exhaustive analysis of different energy storage systems is made, considering the main factors that affect the UAV, such as weight and energy consumption. The conclusion is to use a hybrid system combining renewable energy (PV) and storage device (lithium polymer battery and ultra-capacitor). Another example of the effort to solve this problem in the industry sector is the fact that The French Air Force's Centre expertise Aérienne Militaire – Air Warfare Centre (CEAM) has signed a joint development agreement (JDA) with EnergyOr Technologies to develop UAV platforms powered by EnergyOr's PEM fuel cell system technology (Fuel Cells Bulletin, 2016). It is also in developing the solution to this problem using charging stations (Choi, 2017). This work makes an exhaustive analysis of the economic impact of the implementation of the UAVs in the delivery industry (Park, 2016).We cite some examples differentiating its applicability in the urban or rural environment. In urban areas, drones are intended to be a key element in the study and analysis of the territory in support of planning and urban zoning processes, monitoring of construction processes, photography registration, water management, delivery of goods, management of tourism or control of light pollution, among others. In the non-urban environment, it is expected, through drones, support for the extinction of fires and the streamlining of the response making it more efficient in disaster situations, the detection of diseases in crops, the selective identification of deforested areas, monitoring and control of natural reserve areas, among others (Yanmaz, 2018).There are references to the expected environmental improvements due to drone delivery in rural areas, with results showing that global warming potential (GWP) per 1 km delivery by drone was one-sixth that of motorcycle delivery, and the particulates produced by drone delivery were half that of motorcycle delivery (Park, 2018).Likewise, other fields can be improved by using drones, such as medicine, transporting equipment and drugs to attend to emergencies. Also, in mobility, drones help improve road safety and achieve more efficient traffic management at specific times, as well as border surveillance or bomb threats.However, all of them require management tasks and some human and material teams to complete the action carried out by the drone. This is why the proposal was launched following the intervention of drones in the supply chain in the urban environment.As can be seen, the references are numerous, since they are working very actively on the development of UAVs, but hardly any references to the UAVs-buildings relationship have been found.
2.2. Restrictions
- This article proposes a holistic vision to solve the supply chain problem in highly resilient urban environments, where urbanists (intermediate logistic stations), architects (how the UAV reaches the building), and computer engineers (stigmergy as a decentralized tool) have to solve the problem from warehouse to customer. The development proposed by the authors is resumed in figure 4:
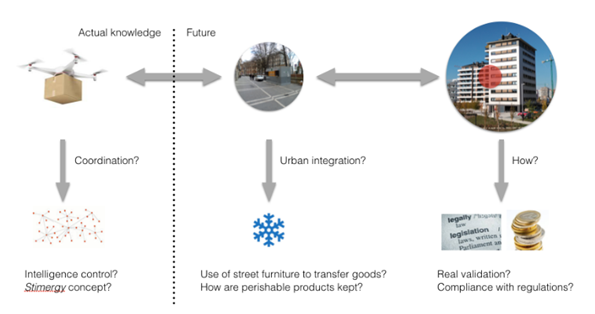 | Figure 4. Development structure of the hypothesis |
 | Figure 5. The illustrated element within the façade showcases a possible initial approach to developing the system as an interface between the apartment and the UAV delivery system |
3. Alternatives
3.1. Data Presentation
- To develop a solution for the adequate implantation of drone delivery services into cities and urban areas, many different environments, as earlier discussed, should be changed, and new frameworks should be developed.
3.1.1. Active Measures (the Dron)
- Eventually, the proper design of frameworks surrounding this service should coordinate between legislation makers, urbanists, and architects. This would take place only to accommodate the surrounding elements of the project and around the drone. Many more factors and complex systems come into play within the drone and its network, combining network engineering, logistics, mechanical, electrical, and informatics design.The final model of mainly comprises mechanisms and strategies that enable the last box" to create a safe and adequately working façade interface for a UAV-based delivery network.The exterior door would be actioned once the delivery drone is near the façade, extending its Platform, ready for the drone's landing. The drone used as a reference is the DJI Matrice 600 Pro. These tests were conducted with a package of 480mm in length, 300mm in width, and 260mm in height (as specified by the DELSAT representative). This package would be of a maximum of 6kg. The Platform would be designed to support the 6kg of the package and the weight of the drone itself (10kg). The drone has a total span of 1668 mm at its widest point, with 1518 mm in length and 727 mm in height. These measurements are considered for the design in length and width of the platform. The total length is an addition of 1m to the width of the drone, such that the drone can safely land and take off without air currents bouncing off the façade.
 | Figure 6. Communications' Box Placement |
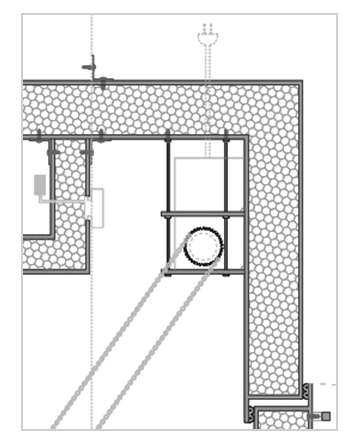
3.1.2. Passive strategies
- The Drone Delivery Network would provide the drones with a Global Positioning System (GPS), as well as identification devices within themselves to be able to detect the buyer's exact façade and communicate with it throughout the delivery, indicating arrival, positioning, time, package specifications, and any other conditions which the sender or the service itself may deem relevant. The identification system would work with the communication software implanted within the façade interface, enabling communication between the two and allowing recognition to ensure proper and accurate delivery to the respective buyer (placement of communications box picturedon the right).The opening of the Façade System itself would take place due to the detection of the drone's proximity to the building. The Platform would act as a door being opened, revealing a set of rails that would prevent the possible fall of the package from the Platform. An electric motor, also controlled by the communications box, would control the speed resistance and final placement of the opening the resistance (aided by strong hinges). As indicated in the below sections, the movement would be of a 90° opening, allowing the drone to deposit the delivery onto the Platform safely. Once the drone is at a safe distance for the system to proceed to close, it do so. The closing of the façade interface would result in the package sliding into the enclosed area, then sealing this same space, keeping its temperature unbothered and isolated (from the inside and outside spaces).
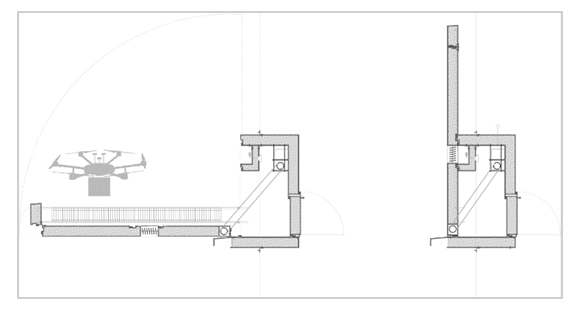 | Figure 7. Opened and closed vertical sections of the system (from left to right) |
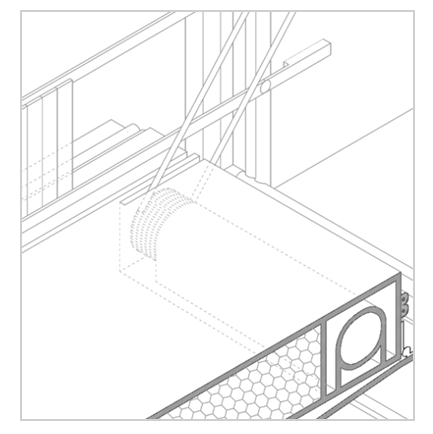 | Figure 8. Sample from Axonometric plans, Platform |
3.2. Evaluation
3.2.1. Technical Feasibility
- The designed model is easy to place into new construction buildings. However, old buildings where this system can be implemented are not as typical and accessible. The model thrives on integrating into prefabricated façades or a ventilated façade system, letting its Platform serve as a continuation of the building's insulation. In some old buildings, however, this system does not include an insulating layer on the exterior side of the façade but rather on the interior of it. This complicates the implementation of the system into old buildings as it creates a small thermal bridge.The model is designed in the fashion of a window. It takes approximately the same area as a window when perforating the façade, then extending into a 3-meter platform. The system's sealing imitates that of a window with complete isolation once closed, avoiding thermal bridges if well integrated into the façade, a more difficult task if done in older buildings.The next page showcases a series of façades (in Pamplona) into which the system looks for integration. They are rated in terms of the viability of the designed element's introduction into the buildings, showing how not all the different approaches to façades designed in the past are eligible for a comfortable and efficient application of this façade interface. As explained in previous comments, façades of new construction buildings find it a lot easier to integrate the system than those in old buildings, mainly due to their placement of thermal insulation. Additionally, balconies can be turned into enclosed areas, potentially hosting the drone façade interface, but that is a possibility yet to explore.Furthermore, new buildings can easily integrate the system into their plans by considering its adaptation to the façade and its support and thermal isolation resolution, preventing thermal bridges and water infiltrations.
3.2.2. Operative Feasibility
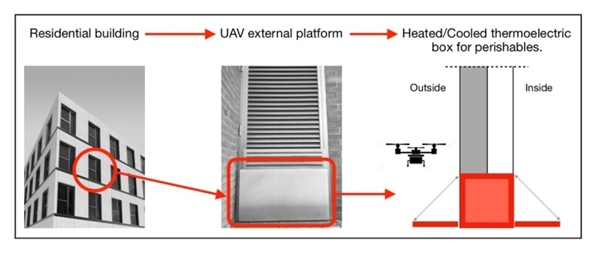
- A proposed requirement is to have a load management system for the batteries of the EVs; in this way, possible hazards could be prevented and kept under control. Nevertheless, there are no available standards for manufacturers to provide an interface or a method of "monitored alarm system within the building" (National Fire Protection Association, 2020).To climatize the box's interior, a Peltier Cell system is proposed, based on previous research conducted by a team within the University of Navarre. The Cells would be placed horizontally as indicated by the researchers, placing approximately 5 Peltier cells. A general scheme of the cells' functioning is visible on the right, together with the placement of the Peltier cells on the project. The ventilation is provided by an open on the Platform, allowing air to ventilate cells. Additionally, these openings are covered with a metal mesh to prevent the package from getting stuck.The communication between the drone and the Façade System would consist of geolocation, client and package identification, and status reports such as proximity, state of delivery, and other possible conditions. The communication between the two is considered in this project to take place through a Universal Radar Arduino product chip, allowing for such communications (right).Furthermore, special care was put into connecting the box and the façade. On the last of the main plans, this connection is made visible through a series of perimetral connections made through a small L profile and the building wall. In this case, the Axonometric representations serve as a great visualization of this connection, showing how the L profile goes all the way around the box structure, enabling its safe and sturdy support when connected to the building. This fixing makes the link secure, but the box's support is conducted by positioning the box onto the building's concrete structure/wall, taking unnecessary strain from the screws themselves (images below visualize this connection).
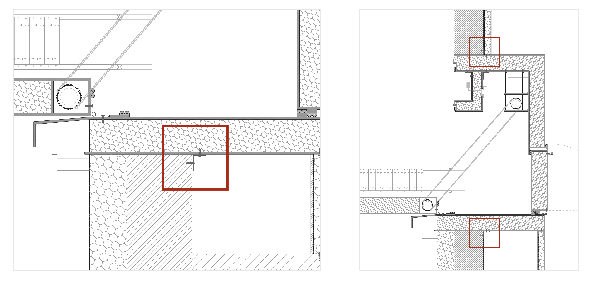 | Figure 9. Vertical Section Plan, Model's fixing (a) y (b) |
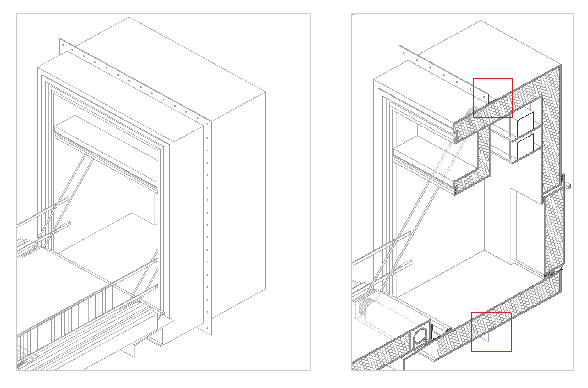 | Figure 10. Axonometric Plan, Model's fixing (a) y (b) |
4. Discussion and Conclusions
- This project relies on the availability and accommodation of many fields and technologies. These include, as before mentioned, legislation and restrictions, urban rigidity, constructive factors, drone technology (specifically battery life and carrying capacity), and many more discrepancies that may come from the introduction of anything connected to the system with other frameworks.Another drawback to this technology is its current unfriendly behavior with old buildings. Old buildings have a different façade system to what the designed model works best with. This makes these unfit buildings more prone to a diverse array of complications such as water infiltrations, big thermal bridges, and structural incongruences were the model to be applied in their façades.Essentially, further development of the product can solve these problems. Still, the current design does not allow for the expansions and appliance of all façades for the introduction of the product into their structures.One of the main upsides of this project resides in the possible increase in productivity of delivery networks. A UAV-based delivery network in urban spaces would benefit buyers who would see their products reach their households much faster and sellers and companies. Sellers could send more packages significantly quicker to the final recipients.The final model is a design adapted for delivering specific packages of a maximum of 6kg in weight, also designed for a particular type of drone (in this case, the DJI Matrice 600 pro), applicable to a finite number of façade systems.The authors provide abundant unpublished graphic material describing the real possibilities of integration in existing facades or in new buildings.Of ocurse, further developments of the system will accompany the introduction of other technologies and advancements within them, especially coming from new drone technology, allowing the façade interface to adapt itself to heavier packaging and bigger or smaller drones.As drone technology progresses and legislation around it is specified, more frameworks will be appropriately designed for the introduction of these machines, making for UAVs a more comfortable environment such that they can carry out their tasks most correctly and comfortably possible, with the least number of setbacks the negative spaces of urban areas allow, ideally making drone deliveries a commonality within dense urban areas, taking advantage of the 3D space between buildings.The article has proposed a hypothesis for integrating receipt and delivery of goods using UAVs in high-density residential environments that pretend to serve as a reference to academics, professionals, and legislators for its development. It is a multidisciplinary problem that can only be solved in an interdisciplinary way (Martín-Gómez, 2015, Martín-Gómez, 2006). Moreover, the problem's solution implies the intervention in the laws of different countries to unify the action criteria and the participation of other professional profiles. Nowadays, the resolution is proposed mainly from an engineering perspective, providing practical and efficient solutions to specific problems. Nevertheless, this field is usually short of the required vision to put together the real needs of a complex entity like contemporary society.Therefore, this paper pretends to reclaim the participation of the architects and urbanism in this collaborative project to develop a network cable to connect the territory and the residential buildings through UAVs.