Rania Raouf Sedky 1, 2
1Faculty of Fine Arts, Decor Department, Interior Architecture, Alexandria University, Egypt
2Lecturer, Faculty of Arts & Design, Pharos University, Egypt
Correspondence to: Rania Raouf Sedky , Faculty of Fine Arts, Decor Department, Interior Architecture, Alexandria University, Egypt.
| Email: |  |
Copyright © 2021 The Author(s). Published by Scientific & Academic Publishing.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

Abstract
Adaptive architecture relates to buildings specifically designed to adapt to their residents and their environments. To design a biologically adaptive system, we can observe how living creatures in nature constantly adapt to different external and internal stimuli to be a great inspiration. The issue is not just how to create a system that is capable of change but also how to find the quality of change and determine the incentive to adapt. The research examines the possibilities of transforming spaces using the human body as an active tool. The research also aims to design and build an effective dynamic structural system that can be applied on an architectural scale and integrate them all into the creation of a new adaptive system that allows us to conceive a new way to design, build and experience architecture in a dynamic manner. The main objective was to address the possibility of a reciprocal transformation between the user and the architectural element so that the architecture can adapt to the user, as the user adapts to architecture. The motivation is the desire to deal with the psychological benefits of an environment that can respond and thus empathize with human emotions through its ability to adapt to the user. The research also raises some important questions for the future. What would be the appropriate structure to show physical interaction with the dynamic world? How can we introduce SMA and other smart materials to be more inclusive in the environment resulting in an adaptive environment? How can Kinect and other remote sensors be used on a global scale to enrich the way we interact with our surroundings? This study concludes with a strong belief in the future of responsive motor structures. We imagine that they are developing the current structure and that they will radically change the way spaces are tested. These structures have obvious advantages in terms of energy performance and ability to adapt to the needs of users.
Keywords:
Adaptive Architecture, Interactive Architecture, Responsive Architecture, Tensegrity
Cite this paper: Rania Raouf Sedky , The Interrelationship Between Kinetic Architecture and Human Bodily Movement: A Kinematic Experimental Analysis of Adaptive and Responsive Structural Systems, Architecture Research, Vol. 11 No. 2, 2021, pp. 53-61. doi: 10.5923/j.arch.20211102.02.
1. Introduction
The research deals with one of the areas that have recently imposed their presence on the scientific and research arena, which relates to adaptive and responsive architecture and its impact on architectural vacuums as interest grows in the kinetic properties and their compatibility with architectural spaces. One of the functions of architecture is to create a comfortable environment inside the buildings that adapt to the vital environmental conditions to regulate the internal conditions of the building over different periods of time. This ability is achieved through movement and interaction using kinematic systems and smart materials.For designing a "biological" adaptive system, observing how living creatures in nature are constantly adapting to various external and internal stimuli can be a great inspiration, both in terms of their structural formation and their adaptation process. The issue is not just how to create a system capable of change but also how to research the quality of change and determine the incentive to adapt. The intention is to create spaces that can physically reconfigure themselves based on user movements like any adaptive system in nature.Faced with an infinite number of influencing aspects such as time, weather, functions, information, human demands, and so on, architecture should be created with various dimensions to deal with this infinity of influences. Many design strategies and technologies that try to respond to continually changing needs have emerged. Further for needs of blind persons, The number of blind persons in 2020, Globally, among 7.79 billion people living in 2020, an estimated 49.1 million (95% UI: 39.0-61.3 million; 54% female) were blind (0.62%; 95% UI:0.49%-0.78%), 221.4 million (95% UI: 197.7-247.0 million) people (2.81%; 95% UI:2.51%-3.13%; 55% female) had moderate VI, 33.6 million (95% UI: 29.7-38.0 million).The research used the descriptive analytical method, in order to study how to take advantage of the properties of smart materials and adapt them to obtain adaptive architecture with the movement of the human body without any contact. The research deals with the possibilities of transforming spaces using the human body as an active tool.Architects have attempted to transform buildings from a static item to a dynamic system in order to meet the changing demands of occupants. They attempted to design spaces, architectural components, and buildings that can respond to movement, sound, light, wind, heat, or humidity from people or the surrounding environment. This reaction is achieved by combining computation and kinetic systems to adapt to the environment and meet the needs of the user.This document presents an overview of principles and terminologies relevant to kinetic architecture. Then, it discusses the uses of the kinetic notion in architecture and emphasizes its implementations in environmental design.
2. Statement of the Research Problem
• Adaptive structures and architecture is a new form of design that was introduced several years ago and requires specialists to look at the movement of the human body and its impact on the formation of adaptive architecture without any contact.• The possibility of cooperation between different scientific disciplines, to reach an adaptive urban environment that responds to the requirements and needs of individuals.• Studying their applications in architecture and interior architecture.
3. Research Questions
• How can we envision a space that can comprehend its users through physical gestures, visual expressions, and behavior rituals, and respond accordingly? • How can we envision a space whose interaction relies not only on pre-programmed processes, but on real-time feedback from its users? • How can we envision a real interactive space whose actual form and configuration can respond to its users? − How can such a space affect how we inhabit our environment, and change the way we live? • What type of structure might be best suited to transform the shape (structure), how best to make it adaptive (adaptive) and how to control the movement of the structure (control).
4. Study Significance
The importance of research comes through:• Explore how the physical environment can change its shape to accommodate different spatial widths based on user body movement.• Identify the relationship between materials, shape and interactive control systems.• Develop a scenario where a human movement can with the structure so that it interacts with its existence without any physical contact.• Demonstrate a future for the possibilities of architectural spaces and performance that may allow communication between many human body movement and architecture.
5. Research Objectives
The research aims to:• Study and propose the issues of user control and interaction rigorously as inevitable elements of human perception and participation in dynamic structures and architectural spaces.• Identify the motor mechanism, memory alloy formation, digital content, manufacturing and user interfaces to create a responsive structural system that can be applied across different architectural scales.• Design and build an effective kinetic structural system that can be applied on an architectural scale and integrate them all into creating a new adaptive system that allows us to visualize a new way to design, build and experience architecture in a dynamic manner.• Dealing with the psychological benefits of an environment that can respond and thus empathize with human emotions through its ability to adapt to the user.
6. Hypotheses of Research
The study of smart materials can be taken advantage of and included in a tense structure that can change its inherent properties to face dynamic external changes to create an environment that can respond and thus empathize with human feelings through its ability to adapt to the user.
7. Methodology
In the research, the descriptive and analytical method was used, with the aim of studying how to take advantage of the properties of smart materials and adapt them to obtain adaptive architecture with the movement of the human body without any contact occurring; the blind people can also benefit.
8. Keywords
8.1. Responsive Architecture
The term response denotes an immediate action against a stimulus. Nicholas Negroponte * coined the phrase "responsive architecture", which he first conceived in the late nineteenth century when problems of spatial design were explored through the application of cybernetics to architecture. He suggested that responsive architecture be the natural product of integrating computing power into built spaces and structures, and that more performing and more rational buildings are the result. It is an evolving subject in architecture that measures actual environmental conditions (via sensors) to enable buildings to adapt their shape, color or character in a responsive manner (via actuators). * Nicholas Negroponte (born December 1, 1943) is a Greek-American architect. He is the founder and chief of the Massachusetts Institute of Technology Media Lab, and is the founder of the Laptop Per Child Association (OLPC).Its aim is to improve and expand the field of architecture by improving the energy performance of buildings using highly responsive technologies (sensors / control systems / actuators). Responsive geometry was defined by Meyboom et al (2010) as an architectural system that causes change in its environment. (SUSHANT VERMA, 2013, p155).
8.2. Adaptive Architecture
Adaptive architecture examines buildings that are designed to adapt to their environment, occupants, and other elements within them, either automatically or through human intervention, on several levels with many digital technologies, for example (sensors, motors, control devices and communication technologies). Adaptive architecture can be considered as the specific framework for integrating a variety of different architectural approaches (intelligent, interactive, responsive, resilient and environmental approach). (HOLGER, S, Oct 30, 2014).
8.3. Interactive Architecture
They are directed processes that lead us to create dynamic spaces and materials capable of performing large-scale, active human functions. Where complex physical interactions are made possible by the creative fusion of embedded "intelligence" computing with its real, physical, kinetic counterpart. In this way, spaces can realign themselves in response to human impulses and by addressing our ever-evolving social and individual environmental requirements.
8.4. Tensegrity *
They are systems in which tension and pressure work in harmony with each other to achieve balance. Buckminster Fuller coined the word "tensegrity" from two words: "tension" and "integrity" "tension" and "integrity", meaning a system of bars and wires that are moved by a group of pneumatic units, which together form the structural structure of a building, within. Projects in which computer technologies and engine technologies are used to produce a series of smart envelopes that seek good relationships between the builder and the user.What is the best way, then, to make an adaptive stress structure like the human body? Bill Gates once predicted that by the end of the 2000s there would be nothing left untouched by the digital world. It can be said that this effect will be widespread by the end of the second decade computers will be seamlessly integrated into the environment. Moreover, as we move from the mechanical approach to the biological one, it is likely that the properties of materials play an increasingly important role in the transformations of physical spaces so that they can be transmitted continuously in the relationship with their users and their environment. * Floating pressure, which is a structural principle that uses isolated components and the supporting elements in it are compressed (supports) and do not touch each other, and the pre-stressed elements are crunched (cables and strings) so that the systems are spatially delineated. The term was coined by Buckminster Fuller.Substances that can be significantly altered in a manner controlled by external stimuli, such as stress, temperature, humidity, electric or magnetic fields, are called "smart materials". The implications are profound, as using such substances in a widespread way will have a fundamental impact on the way we live. The advantages of these materials that demonstrate electromechanical properties pave the way for the seamless integration of sensors and motors into the environment.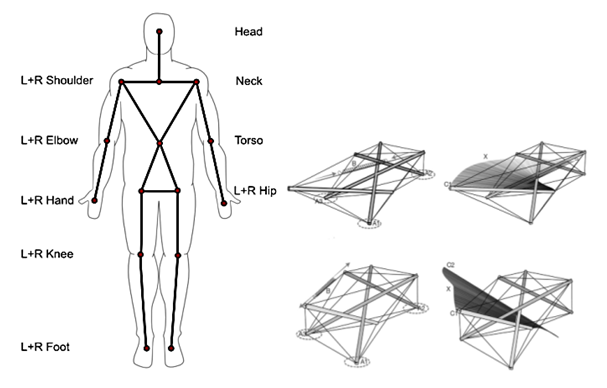 | Figure 1. Power transmission centers (movement) and digitally simulating the tensegrity structure and studying force distribution. The advantage of this approach is that the human body itself functions as a form of tensile structure with flexible muscles and tissues operating with tensile capacity, and bones and other hard organs operating primarily with compressive capacity. If both the user's body and the structure of the environment itself are governed by similar logic of behavior, it will be easy to model the behavior of one over the other |
Definition of subjective movement of kinetic architecture according to human movement: Everybody knows—and especially architects, of course—that a building is not a static object but a moving project, and that even once it is has been built, it ages, it is transformed by its users, modified by all of what happens inside and outside, and that it will pass or be renovated, adulterated and transformed beyond recognition.‘ (Latour and Yaneva, 2008).The purpose of this study is to examine an interactive installation project that answers these problems. More specifically, the project investigates the interface between remote sensing and a responsive environment in order to investigate the idea of an interactive architecture that conditions and responds to user movements.The project does not intend to invent new technologies in and of themselves, but rather to utilise current ones, demonstrate their potential applications, and thereby grasp new interaction situations and methodologies that may inspire future study in this field. This paper is based on “hard science” rather than science fiction. So, as Michael Fox says, “the objective is to make convincing extrapolations based on where we stand today through inclusively appreciating and marshalling correctly the existing facts with respect to technological development” (Fox 2008: 2).In particular, the paper analyzes three crucial difficulties in the project's design process in particular:1. What kind of structure would be best suited for shape transformation? (structure).2. How to make it as adaptable as possible (adaptation).3. How to regulate the structure's movement (control).If architects designed a building like a body, it would have a system of bones and muscles and tendons and a brain that knows how to respond. If a building could change its posture, tighten its muscles and brace itself against the wind, its structural mass could literally be cut in half (Guy Nordenson 2005: 300).The goal is to develop places that can physically reconfigure themselves based on user movements, similar to how any soft adaptable system in nature does. As a result, this article focuses on the installation's adaptive ensegrity structure, which responds to human movement, as well as the decision-making process that led to its design. The main goal is to address the possibility of a reciprocal transformation between a user and an architectural element, in which the architecture adapts to the user and the user adapts to the architecture, as well as to engage with the psychological benefits of an environment that can respond to, and thus empathize with, human emotions through its ability to adapt physically to the user.Applications of The influence of human movement on the formation of Adaptive Architecture:1. The first application: Behnaz Farahi ALLOPLASTIC ARCHITECTUREAlloplastic Architecture It is a project that includes a tense adaptive architecture that responds to human movement. The intention is to create a scenario where a dancer can dance with the structure so that he interacts with her presence without any physical contact. And he demonstrates the possibility of a dynamic tension structure responding to human motion using shape memory alloys (SMAs), Kinect and Arduino. This project is distinguished in terms of its structural adaptability, the soft-form switching language and the interaction control technology that will provide new possibilities for enriching human-environment interactions. (Behnaz Farahi Bouzanjani ACADIA 2013)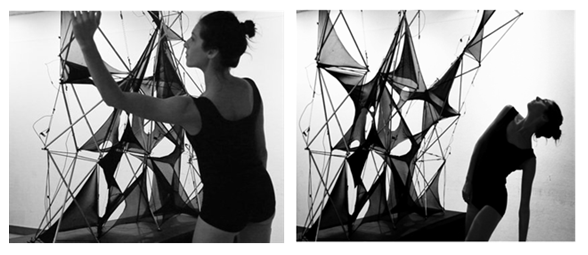 | Figure 2. ALLOPLASTIC ARCHITECTURE, It is a term taken from psychoanalysis. Sigmund Freud and Sandor Ferenczi use the term, and the term refers to an individual who suggests the environment and its change |
2. The second application Aurora, the interactive kinetic roof Aurora 2016 Taken from Aurora, the Roman goddess of dawn, who renews herself every morning, soaring through the sky and announcing the arrival of the sun, the installation is about bringing things back to life and illuminating the world. This experimental structure was developed through a research and development process that investigated dynamic shape-changing structures, robotics, material behaviors, membrane structures, plate and cut methods, and an interactive system of controls. These explorations depended on the links between design, technology, engineering, and manufacturing. This project includes five floating motion discs that not only move along the z axis but also have the ability to rotate in a different direction in a 3D vector space. It is an interactive kinematic roof that responds to the physical movement underneath. How can a building be dynamic and develop an understanding of users through their movements and respond accordingly? In our contemporary world with advances in sensory environments, how can our sense of space be increased through artificial intelligence? How can we use the movement of the human body as a means of interacting with an artificial, man-made environment? Will architectural spaces be able to incorporate interaction, unpredictability and movement to serve as a kinetic interface that conveys stories about the activities of their inhabitants? Will the soft dynamic structure of the future be able to convey information about users' activities within the spaces? Aurora attempts to address these questions by designing an interactive ceiling installation. The primary goal of this work is to design a space that can discover users and reconfigure its shape according to their physical movements. By tracking users' physical movements with a Kinect motion capture camera and translating them to model different motions, the project attempts to develop a deeper understanding of embodied interaction and produce more intuitive interactive experiences. It aims to rethink the traditional solid architectural space by combining form-shifting, responsive lighting, adaptive spaces and interactive responses. It is, therefore, an attempt to reimagine the possibilities of sensory spaces and robotic architecture. robotic architecture. | Figure 3. The interactive kinetic roof Aurora 2016 |
The roof measures 15 by 15 feet (about 4.6 by 4.6 meters) and contains five floating motion discs covered in synthetic texture. There are also four discs that do not move. The discs can move up and down and can rotate in different directions, which means that the ceiling can be quite expressive. The roof is activated by a connected Kin Kinect motion capture camera which translates motion into operating the roof panels. In addition to the discs responding to movement, the installation also contains special lighting that turns on and off based on the visitor's path into the room.3. The third application: REMEMBRANE | Shape Changing Adaptive StructuresRemembrane It is an exploration of the application of shape memory blends to create a coherent structure on a wide range of adaptive mobility that can adapt to environmental changes and can be easily controlled by users through an easy-to-use interface. Emphasis has been placed on research in structural design that follows the properties of materials and allows users to be the ultimate decision makers for the performance of the structure. The developed prototype is looking at using nitinol springs as linear actuators. From the outset, the project avoided using heavy hub motors to move the system and focused on developing a distributed system of lightweight actuators (nitinol springs) integrated into the structure that allow for more precise shape control and more energy-efficient movement.The first development step was to test and evaluate different actuators for their resistance, lifetime and light weight. Shape memory alloys (especially Nitinol) were the specific solution because they are relatively strong and lightweight. It is an exploration of the application of shape memory blends to create a large-scale harmonic architecture of adaptive mobility that can adapt to environmental changes and can be easily controlled by users through an easy-to-use interface. Emphasis has been placed on the structural design that follows the properties of the materials and allows the users to be the final decision makers for the performance of the structure. The developed prototype investigates the use of Nitinol a shape memory alloy as linear actuators. From the outset, the project avoided using heavy hub motors to move the system and focused on developing a distributed system of lightweight actuators (nitinol springs) integrated into the structure that allow for more precise control of shape and greater efficiency in motion energy use.After studying the properties of Nitinol and understanding its advantages and limitations as a motor, the actual skeletal structure had to be explored. Therefore, the next step was a series of tests focusing on engineering principles and structural systems that allow for locomotor behavior. Each iteration of the system design was simulated to understand and predict its behavior. The program that was used was Kangaroo, which is a Grasshopper plug-in for Rhinoceros 3D. Most of the systems explored can be understood through the analogy of the human body in which the structure itself, and bones, are composed of rigid elements (rods), muscles, and nitinol wires, that undertake this movement. There are two structural engineering principles that have been studied further and used as a basis for the ultimate design of the system: pantographs and tensions. Pantograph mechanisms are able to extend or compress in a vector perpendicular to the transmission. Pantographs are made of cross sticks, and their main advantage is their ability to achieve large expansions with a small operating motion. They are also lightweight structures and offer the idea of diffusion capacity. (Ji Won Jun 1, Matteo Silverio, Josep Alcover Llubia, Areti Markopoulou, Angelos Chronis, Alexandre Dubor, p183-187).The Remembrance prototype allows for a transformation in the future of architectural approach as entire spaces, buildings and cities will be able to move and adapt independently to perform in the best possible way.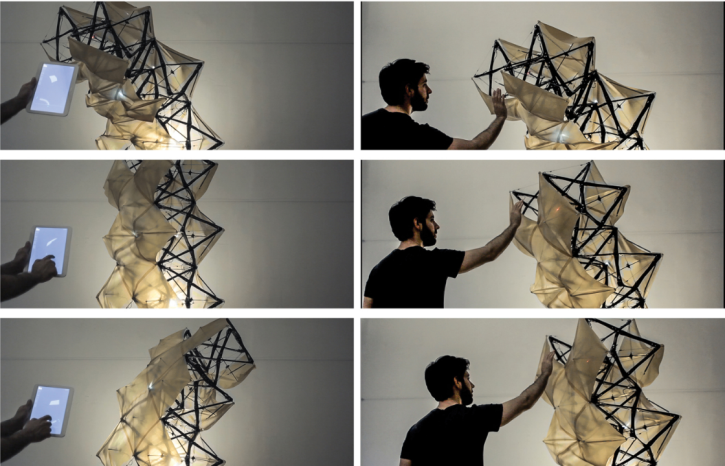 | Figure 4. REMEMBRANE | Shape Changing Adaptive Structures |
4. The fourth application: The space moulded by the body’ Locus’The configuration design is based on the simple module of an equilateral triangle that is repeated many times and creates a flexible structure. The term place, here means the center of activity, interest or focus. The fixation is designed to encourage audience participation by allowing them to experience the appropriateness of our movements in the surrounding spaces. This is achieved by giving both the performer and the audience an opportunity to actively participate in the motor structure. He also foresees resilient spaces of the future that propose an ecological model of the environment that is able to ensure participation for all.In theory the entire formation is conceptualized as a "space in itself" that integrates the performance and behavior of the audience into one place. As such, it is a reciprocal space that is conceptually and effectively shaped by our bodies, not only with the performer but also with the audience that actively participates in modulating the dynamics of space and leads to its influential dimensions. In Locus, an integrated platform has been developed in Unity 3D using the Kinect V2 sensor to detect some of the joints of the body and in this way identify related body movements in a simpler way. In order to achieve this, it is important to understand the different qualities of space that are created by movement so as to construct a dynamic space. To achieve this, the information obtained from the Kinect sensor was translated into variants of the physical space / physical object using a serial connection with the Arduino and testing various Servo Motors angles to control the physical tool to modify the area.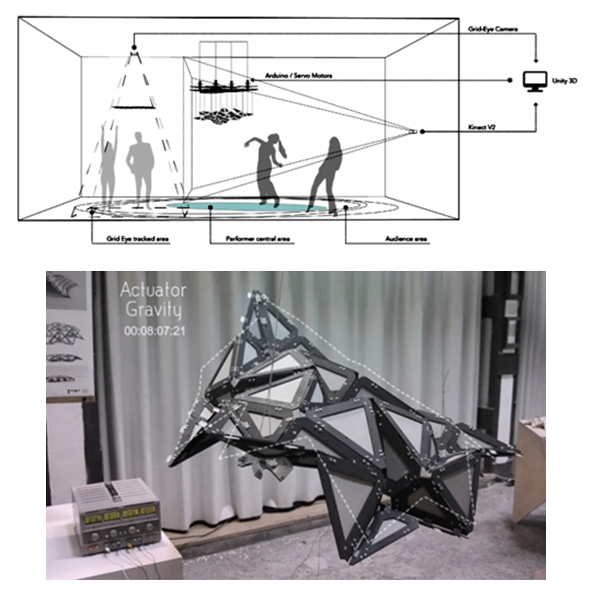 | Figure 5. The relationship between the physical body, the digital body and the dancer |
5. The fifth application of the wall that breathes 2014 Breathing wall It is a wall that moves based on the movement of the hand. This project has two main goals. First, first, characteristics, interaction properties, interaction based on interaction with infrastructure facilities. Second, and most importantly. How do you interact in ways you interact in environments? The installation is made of wood, rubber fabric, and PVC tubing which is controlled by the Leap Motion's Arduino micro-controller. Leap Motion recognizes specific cues, and initiates several types of motion on the surface. It could be possible to have a visual scene interface by interacting with their environments without a mechanism. These interfaces will allow easy control of our physical environment, making the relationship more intimate.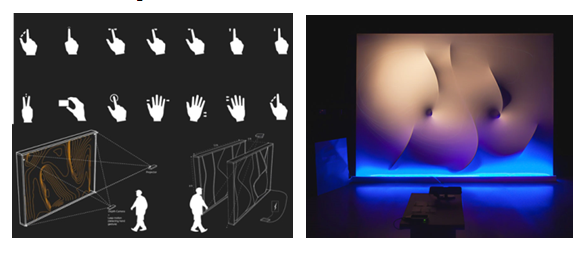 | Figure 6. The depth camera captures surface topographic data in real time using the Ausus Xtion PRO depth camera. It then processes this information in order to create a series of topographic contour lines, which are projected onto the surface |
Materials that can be used in kinetic architecture according to human movement: Projects that fall within the framework of the aforementioned guidelines make the use of a specific set of materials, including memory alloys, EAP-electro-active polymers, and other materials, each producing the same result when stimulated by motion. While the most obvious distinction from its natural or artificial nature will be its molecular structure responsible for the engineering transformation, and the key here is its function, where and how these materials are placed in the architectural structure to make use of them. This means that the main classification of systems is done mainly on the architectural side rather than the technical part of the materials.1. Shape memory alloys (SMA):A new form of smart material that has mechanical properties unavailable in all materials and alloys that have traditionally been used in engineering and other applications; As these alloys are distinguished by their ability to restore their original shape when heated. When the retaining or shape-preserving alloys are at low temperatures, they have low yield resistance, which facilitates their formation and transformation into any new form, and they retain this shape until they are heated (to a temperature higher than their transformation temperature) and then restore their original shape. Because it is one of the least expensive and most accessible smart materials for designers and architects to experiment. (Davide Fugazza, September 2003)And because of the properties of these alloys; Recently used in a number of applications in various fields such as biomedicine, space sciences and satellites, and the latest research has proven the possibility of using these alloys in vibration control devices. Despite this, the shape-remembered alloys cannot be used in all applications. When using them, the application conditions must be addressed in terms of stresses, movement required in application, pressure and temperature, and temperatures must be taken care of in particular. As it is the main factor in determining the shape of the alloy. The nickel-titanium alloy or the so-called Nitinol is the most important and most expensive form-remembered alloy. One of the alloys also traded in this field is the copper-aluminum-nickel alloy. Shape rememberor alloys can also be obtained using zinc, copper, gold, and iron as elements.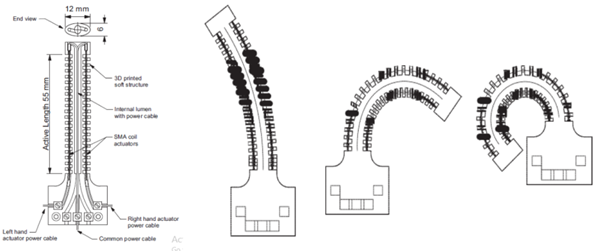 | Figure 7. Schematic diagram showing SMA (Smart Materials and soft robotics) bending and interaction with low electric current |
2. Shape Memory Polymers (SMP)A shape memory polymer (SMP) is a material responsive to stimuli and has the ability to change a programmed shape back to its original form upon operating a suitable catalyst. Over the past decades, SMP has attracted great interest in the materials field due to its versatile applications. One of the primary forms of SMP is polyurethane, which has a wide range transition temperature to recover its shape.3. Kinect sensor:It is an attempt to relate physical and kinetic changes to the world of bit and programming. Kinect was launched on November 4, 2010 and sold an impressive 8 million units in its first sixty days, and it entered the Guinness Book of World Records as the best-selling electronic device in consumer history.” Kinect was indeed the first commercial sensor that allowed the user to interact with a console through a user interface. Are normal.Technically speaking, the Kinect not only has an RGB camera, depth sensor and multi-row microphone, but it can also track body movement, hand / skeleton movement sensor and gesture recognition. It does this through the use of infrared-based camera technologies that have been developed to scan 3D objects in a void. Kinect is based on range camera technology by PrimeSense, which interprets 3D scene information from continuously regulated infrared light. This 3D scanner system called Light Coding uses a variety of image-based 3D reconstructions. In other words, the two elements of the depth sensor, the IR display and infrared camera, work with the PrimeSense internal chip to recreate the 3D motion of the scene.In fact, skeleton tracking uses a deep camera that uses an infrared projector to record not the color of the surface but the distance of an object from the device. As Greg Borenstein comments, “Unlike conventional photographs where each pixel records the color of light that reached the camera from a specific part of the scene, each pixel of this deep image records the distance of the object in that particular part of the scene from the device. Recognize physical movements and judge distance and depth, but also has the ability to learn from and adapt to users over time. (http://behnazfarahi.com)However, it can be difficult to work with Kinect for Architects without any consultants.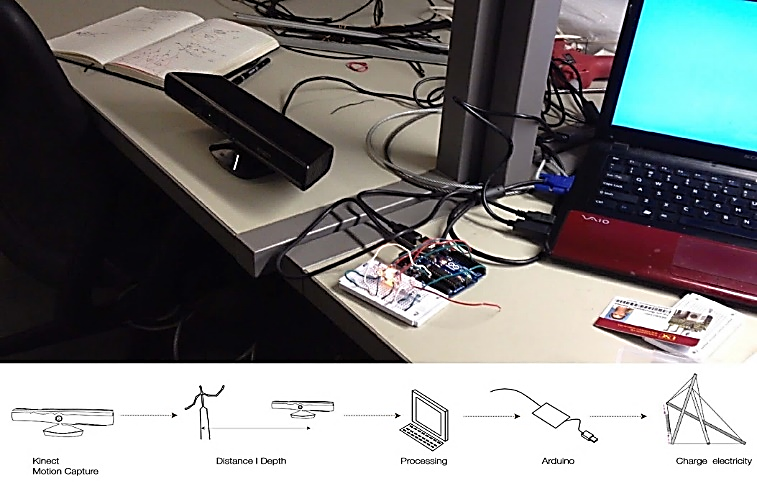 | Figure 8. Sensor work mechanism |
But how could these new developments in smart materials open up the possibility of a tense structure that could mimic the behavior of any adaptive organism? We can already perceive the potential impact of this system, in its ability to act in a predictable and controllable manner, and in its ability to respond intelligently to various challenges. The key feature of any adaptive architecture is that it must be able to sense and interact with its surrounding environment in a predictable and desirable way through the integration of actuators and sensors.Active structures consist of two types of load resistance members: static or passive members, and dynamic or active members. In this sense, an "active" component of the chassis breaks the balance while the rest of the chassis maintains dynamic stability in order to achieve the next stage of equilibrium. As a result, the structure moves.As such, this research can approach certain principles in neuroscience, most notably the concept of neuroplasticity, which refers to the ability of neural pathways to change and respond to external stimuli from the environment. This process must be seen as a dialectical process by which humans respond and shape the environment itself. In other words, neuroplasticity should be seen not only as a negative response to the environment, but also as an active factor in the way humans interact with and change that environment. This not only indicates the movement of the human body within a vacuum, but also the ability of humans to design that space physically. Shape memory alloys are not new and have been widely used previously for a number of kinematic prototypes. The new aspect of this research is the intersection of design, computational simulation, physical computing, and user interfaces in implementing dynamic systems (user environment) in the architectural scale.
9. Conclusions
This article tries to record the critical problems behind the design of an interactive structure and examine the design decisions taken.One of the most important contributions of this study is the discovery that a physical environment may be built to change shape in response to user body mobility in order to accommodate diverse performances in the space. The research also offers some intriguing future questions. What kind of structure would be appropriate for exhibiting physical engagement with the dynamic world?How might we put SMA and other smart materials into the environment so that they are more thoroughly implanted, resulting in an adaptive environment? And how might Kinect and other remote sensing technologies be used more broadly to improve the way we interact with our surroundings?Furthermore, the article raises some intriguing broader questions about the shifting role design today.Not only are buildings beginning to operate in a more biological manner, such that even component design can be modeled on the concepts of dynamic tensegrity structures that inform the human body itself, but the entire nature of design is being rethought.But perhaps the most intriguing contribution of this project is to call into question the skepticism toward technology implicit in the philosophies of conservative thinkers such as Martin Heidegger, whose criticism of technology's potentially alienating effect has contributed to a negative attitude toward technology in general and computation in particular.This paper attempts to document the critical questions behind designing an adaptive structure and analyzing decisions made in the design process. One of the most important contributions to this paper is to expose the fact that a physical environment can be designed to alter its shape in order to accommodate various displays in space based on the movement of the user's body.So this paper addresses the possibility of a reciprocal shift between the user and the architectural object, where the environment can influence the user, but the user can equally influence the environment. It also deals with a series of multidisciplinary challenges, ranging from an understanding of technology and how these environments are able to change formally to a psychological and neurological understanding of how humans themselves respond to those changes, and become active agents in the redesign of those environments. The main contribution of this research is not just any of the presented parts per se, but rather integrating them all in creating a new adaptive system that allows us to envision a new way of designing, building and experimenting with architecture in a dynamic and efficient way.
10. Results
- The dynamic structures of tension are suitable for interacting with a dynamic world and reconfiguring itself through time. - The possibility of transforming spaces using the human body as an active tool. The research aims to determine the relationship between architecture and human movement by using the body as a means of modifying space. Our bodies are units that are capable of altering the environment. - The paper was presented for the research of these materials in order to help the adaptive and responsive movement to gain its reliability against other kinematic systems, to place itself within a broader perspective, making it perhaps indispensable in the coming days.
11. Recommendations
Body language and movement are rich media for communication and emotional state awareness. Movement may be more expressive and subtle than language or facial expression, which is easier to suppress or control. Therefore, it is recommended to research the following: - Teaching new ideologies and adaptive architecture to human body movement. - The importance of studying smart materials and including them in a tense structure whose inherent properties can be changed to face dynamic external changes. - Understand the characteristics of movement that conveys emotional content.- Development of mathematical models for automatic recognition of emotions from movement. - Adaptation of pre-defined movement paths for emotional content overlay. - To study the effect of the appearance of a moving structure, mobility and dynamism on the transmission of feelings through movement. - The importance of using this technique in areas that are difficult for those who suffer from poor eyesight to adapt to.
References
| [1] | Holger SchnädelbachEmail authorHendro Arieyanto, Movement-Based Co-creation of Adaptive Architecture, 23 August 2018. |
| [2] | Beesley, Philip, Omar Khan, and Michael Stacey, eds. ACADIA 2013 Adaptive Architecture: Proceedings of the 33rd Annual Conference of the Association for Computer Aided Design in Architecture. Toronto: Riverside Architectural Press, 2014. Print. |
| [3] | SUSHANT VERMA, Adaptive [skins]: Responsive building skin systems based on tensegrity principles, P155, 2013. |
| [4] | HOLGER, S. Adaptive Architecture - A Conceptual Framework, Conference: MediaCity, Interaction of Architecture, Media and Social Phenomena, Weimar, Germany. (Oct 30, 2014). |
| [5] | Davide Fugazza, SHAPE-MEMORY alloy devices in earthquake engineering: mechanical properties, constitutive modelling and numerical simulation, September 2003. |
| [6] | Ritter, 2006” Smart Materials in Architecture, Interior Architecture and Design” Birkhauser Architecture, 1ST edition, November 21, p. 52. |
| [7] | Behnaz Farahi Bouzanjani, ALLOPLASTIC ARCHITECTURE: THE DESIGN OF AN INTERACTIVE TENSEGRITY STRUCTURE, ACADIA 2013. |
| [8] | Ji Won Jun 1, Matteo Silverio, Josep Alcover Llubia, Areti Markopoulou, Angelos Chronis, Alexandre Dubor, Remembrane: A Shape Changing Adaptive Structure, p183-187. |
| [9] | https://www.arch2o.com/responsive-to-adaptive-the-shifting-trends-in-architecture/ |
| [10] | http://www.tinialloy.com/pdf/introductiontosma.pdf |
| [11] | http://33h.co/w8vpe |
| [12] | http://behnazfarahi.com/alloplastic-architecture/ |
| [13] | http://www.interactivearchitecture.org/the-space-moulded-by-the-body.html |
| [14] | https://www.itke.uni-stuttgart.de/de/archives/portfolio-type/itech-research-demonstrator-2018-19 |

 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTML