-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
Architecture Research
p-ISSN: 2168-507X e-ISSN: 2168-5088
2013; 3(1): 1-11
doi:10.5923/j.arch.20130301.01
Precise Locations in Space: An Alternative Approach to Space Syntax Analysis using Intersection Points
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLMichael Dawes, Michael J. Ostwald
School of Architecture and Built Environment, The University of Newcastle, Callaghan, NSW, 2308, Australia
Correspondence to: Michael Dawes, School of Architecture and Built Environment, The University of Newcastle, Callaghan, NSW, 2308, Australia.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
Space syntax is a mathematically derived theory that provides a means of understanding the spatial configuration of a building from the perspective of the social interactions between inhabitants. The three conventional approaches to space syntax research are convex space, axial line and visibility graph analyses. These three procedures convert urban and architectural plans into, respectively, a series of defined spaces, lines of sight or visual locations. Once this has occurred it is possible to mathematically analyse the relationships between these elements. Unfortunately, these three methods for abstracting space do not allow for the analysis of precise locations in a plan without a computationally intense process, and many architectural theories seek to measure and debate such locations. However, there is an alternate, rarely discussed development of the axial line approach, which allows for the identification and efficient analysis of discrete locations within a spatial configuration. This approach, intersection point analysis, inverts the axial line map to create an intersection graph that can then be analysed using standard space syntax measures. This paper provides a worked example, using a series of hypothetical building plans, of the process of inverting an axial map to create an intersection graph and its subsequent mathematical analysis. The paper also discusses the potential applications of this approach in situations where alternative procedures would be either less informative or too computationally intensive.
Keywords: Intersection Analysis, Architectural Plan Analysis, Graph Theory, Space Syntax
Cite this paper: Michael Dawes, Michael J. Ostwald, Precise Locations in Space: An Alternative Approach to Space Syntax Analysis using Intersection Points, Architecture Research, Vol. 3 No. 1, 2013, pp. 1-11. doi: 10.5923/j.arch.20130301.01.
Article Outline
1. Introduction
- Hillier and Hanson’s The Social Logic of Space[1] introduced the concept of space syntax and a suite of tools for the analysis of architectural and urban plans. The foundations of space syntax analysis originate in a field of mathematics known as graph theory that deals with the study of topological relationships. In order to apply graph theory to architecture, a range of mapping or abstraction techniques are required to convert complex spatial environments into a set of topological relationships. The three most common forms of abstraction, which precede analysis using space syntax mathematics, produce convex spaces, axial lines and visibility graphs.The first of these three, convex space analysis relies on generalising an environment into a number of visually coherent spaces where a straight line drawn between any two points on the perimeter of a room will never intersect the perimeter in another location. Convex space analysis graphs and investigates accessibility; the configurational relationship between rooms as defined by the capacity to pass between them. Typically, environments such as architectural interiors, dominated by well-defined spaces, are the subject of this approach[2-5].The second common space syntax method, axial line analysis, generalises environments into the set of the fewest and longest straight lines of sight and movement needed to survey or pass through a complete network of spaces. Axial lines represent idealised paths through space and the analysis of the topological relationships between axial lines is also an analysis of the movement potential of an environment. Axial line analysis is best suited to environments where long narrow paths prevail and it is commonly used to consider street configurations in urban districts. Axial line analysis also provides valuable insights into movement volume and potential at an architectural scale[6-9].The third conventional method for generalising space is to create a visibility graph. This procedure imposes a regular grid over a plan of an environment and thereafter identifies the visibility relationships between each square in the grid. Depending on the input data, the analysis of these relationships reveals the visible (sight related) or traversable (movement related) properties of the space. This procedure almost certainly requires computational rather than manual analysis due to the relatively high number of calculations needed to analyse a space. Visibility graph analysis is best suited to well-defined environments such as those within buildings[10-12].One disadvantage of convex space and axial line analysis is that their abstraction methods eliminate the opportunity to study precise locations in a plan. The former technique is effectively concerned with the properties of an entire room and the later with those of an access path. Visibility graph analysis suffers a similar problem, albeit to a lesser extent. The visibility graph’s ability to identify specific locations is subject to the availability of computing power and the resolution of the grid; a resolution of 500mm per grid line is common whereas a more accurate resolution of 100mm dramatically increases the number of calculations. Yet, architects often create spaces where particular locations are more significant than paths, rooms or general positions. For example, in a typical Romanesque cathedral the precise point where the axis of the nave intersects with the line of the chancel is both symbolically and phenomenologically important. Similarly, Le Corbusier’s vast orthogonal urban plaza in Chandigarh has neither defining walls nor clear paths, but it does possess a series of significant locations, often defined by the intersections between axes generated by elements in the space (like the Open Hand monument and the Tower of Shadows). While such cases are common in architecture, examples of designers discussing the spatial configuration of generalised rooms, paths or positions are, in comparison, rare. This suggests that, either there is a misalignment between the methods of designers and of analysts, or that new analytical techniques, to more rigorously interrogate the mathematical properties of specific locations, must be considered. It is the latter proposition, the need for techniques that can be focussed on points in space, that is the catalyst for the present paper.Michael Batty[13] proposed an alternative approach to the social analysis of architectural and urban space which is reliant on an inverted version of the axial map; a process that shifts the emphasis of the map from the lines of movement or sight, to their intersections. Each of these intersection points is not only a precise location in space, but also the intersection of long lines of sight. Such points necessarily possess a relatively high level of both visual information and significance for way finding; both of which notably influence occupant behaviour[14, 15]. While this alternative method has potential for aligning the goals of designers and of building analysts, the mathematical processes may only be applied to the new intersection point graph if the data abstracted from the plan complies with the basic axioms of graph theory.The present paper describes the development of an intersection mapping and analysis approach that allows for space syntax techniques to be used for the consideration of precise points on an architectural plan. The paper commences with an overview of graph theory and the differences between convex space, axial map and visibility graph analyses. Thereafter the paper describes a procedure for inverting the axial map and demonstrates, using three hypothetical villa plans, the construction of a valid intersection graph from an axial line map. Finally, the paper records the results of the mathematical analysis of one of these villas before offering concluding thoughts on the procedure and directions for future work. The detailed interpretation of these mathematical results is beyond the scope of the present paper although there are many examples available of how space syntax measures are used to understand spatial properties[1, 6, 16].The analytical method described herein is a refinement of Batty’s[13] procedure for analysing the dual graph of an axial map. This procedure allows greater articulation of results than traditional axial line maps in locations poorly suited to visibility graph analysis. While the method described in this paper has previously been suggested[13, 17], and some space syntax approaches relating to visibility graph analysis[10] do mathematically describe the properties of localised zones, the intersection analysis technique has not previously been demonstrated in this way. Furthermore, although Batty[13], and Jiang and Claramunt[17] have suggested urban applications of this approach, the potential architectural application has not been developed to a similar level of resolution, or described in detail, as the present paper does.
2. Background
- The origins of graph theory may be traced to a topological puzzle centred on the Prussian city of Konigsberg which, in the thirteenth century, was a vibrant centre of commerce. At the heart of the city was the river Pregel, which “flowed around the island of Kneiphof[…] and divided the city into four regions connected by seven bridges: Blacksmith's bridge, Connecting bridge, High bridge, Green bridge, Honey bridge, Merchant's bridge, and Wooden bridge”[18 p200]. The puzzle challenges a person to identify a path through the city that shares a common start and finish point and crosses each bridge only once. Euler[19] proved that such a journey was impossible and, in doing so, developed a general theorem to solve similar problems by simplifying complex environments into a set of abstract relations. In this way, Euler’s theorem laid the foundations for graph theory; the formalised study of binary or pair-wise relationships between objects within a defined set. Such relationships, which are called topological, are described as binary because either a relationship exists or it does not.
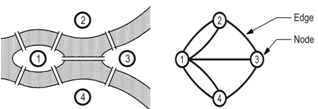 | Figure 1. A diagrammatic representation of Konigsberg’s geographic space (top) and a graph depiction of Konigsberg’s topological relationships (bottom) with locations represented by nodes and movement paths represented by edges) |
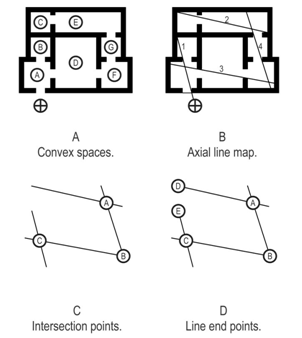
 | Figure 2. (A) Plan view of a small villa identifying convex spaces, (B) that plan represented as the justified graph, (C) the axial line map of the same plan, and (D) its equivalent justified graph. Note: Axial line 3 (C) is node 3 (D) and incorporates the external carrier |
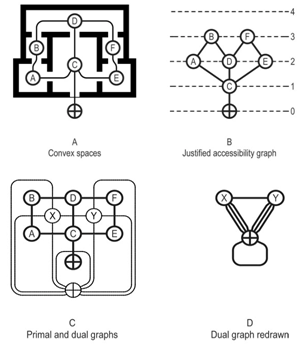 | Figure 3. A building plan (A) and associated justified access graph (B), form the basis of dual graph (C). The dual graph (the dotted lines in C) places a node in each region of the access graph with edges linking adjacent dual graph nodes (D). It is possible for a node in the dual graph to be adjacent to, and therefore link to, itself |
3. Methodological Issues
- Deriving mathematical values for intersection points requires these positions to be the subject of the analysis, which in turn requires an alternative representation of the axial map. Batty[13] refers to this alternate representation as the “dual” of the axial map; however, this term is a potential source of confusion. Graph theory researchers create the dual of a map by placing a node in each graph region and connecting these new nodes with edges that cross each edge in the original, “primal”, map (Figure 3). This procedure effectively makes each isolated set of walls the subject of the analysis, rather than the intersection points and is only applicable to planar graphs (Figure 4), yet most axial maps are not planar.
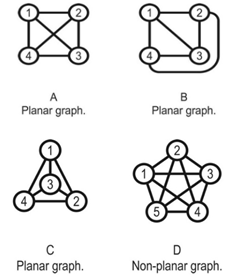 | Figure 4. A graph (A) which can have its nodes and/or edges rearranged in two-dimensions so that no edges cross each other while maintaining all topographic relationships (B and C) is planar. A non-planar graph (D) will always possess edges that cross, regardless of arrangement |
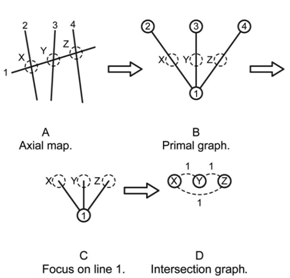 | Figure 5. Inversion of a simple axial map (A) to an intersection graph (D). (B) A justified graph of the axial map shows lines 1-4 as nodes and intersections X-Z as edges. (C) Focusing on axial line 1 shows that the node representing this line possesses three edges. (D) When the graph is inverted axial line 1 becomes a single edge and this edge is required to connect three nodes (previously intersections X-Z) which is impossible. Additional edges are therefore required to ensure all nodes are connected |
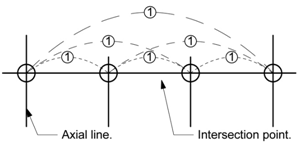 | Figure 6. All intersection points sharing a common axial line and the addition of additional graph edges ensure that each node is only a single topological step distant to any other node on the axial line |
 | Figure 7. Lines 1 and 2 in the axial line map (B) are required to surveil convex spaces B and C of the plan (A). Axial line intersection points (C) fail to describe the entirety of the building configuration, whereas adding nodes D and E to surveil rooms B and C solves this problem |
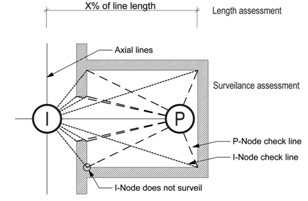 | Figure 8. Line stubs may be included in the intersection graph based on percentage length or surveillance assessments. P-Node check lines show the space surveiled, I-Node check lines pass through walls to meet the same surface vertex points thus the P-Node provides unique surveillance properties |
4. Worked Example
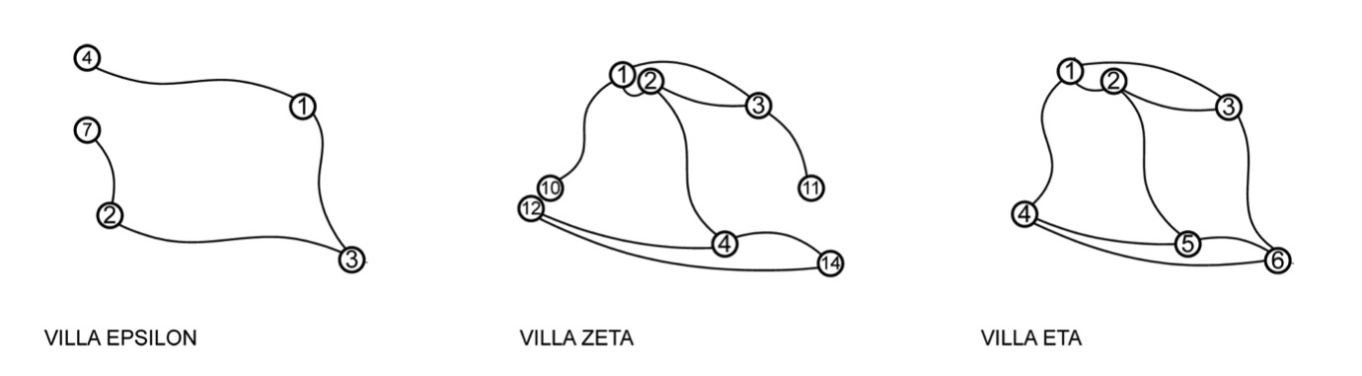
- This section of the paper utilises the plans of three hypothetical villas to demonstrate a worked example of intersection point analysis. The villas form the basis of a previously published, extensively detailed, discussion on the creation of axial maps[25]. The authors designed each villa to possess identical footprints, a single external door and to produce a different type of axial map in each case (linear, branching or looping). The villas are named Eta, Zeta and Epsilon and six steps are required to develop the intersection graph from the axial line map and calculate the properties of each.Step 1. Draw the axial map for the selected spatial configuration (Figure 9).Step 2. Identify all axial line intersection points within the map and add an intersection node to these points (Figure 10) and assign each a unique identifier, in this case a numbered index.Step 3. Select and apply a method for stub retention and removal (in this instance stubs are retained based on plan surveillance only). Begin by adding potential nodes (P-Nodes) to the end of every stub and assign a unique identifier to each (Figure 11). Determine if the P-Nodes surveil a portion of the plan that no I-Node surveils. Remove P-Nodes that do contribute to plan surveillance. Re-label retained P-Nodes as stub nodes (Figure 12).Step 4. Map Inversion. During this step, the axial map is inverted to produce the intersection graph by linking I-Nodes and S-Nodes in a way that reflects the properties of the axial map. First, directly link each node associated with an axial line to each other node associated with that axial line. S-Nodes will only ever be associated with a single axial line whereas I-Nodes are always associated with two, or more, axial lines. The links ensure a graph step distance of one exists between every node located on a single axial line (Figure 13).Step 5.Once the intersection graph has been produced, the axial map is no longer required (Figure 14) and, if desired, the intersection graph may be redrawn to clarify the topological relations although this has no impact on the mathematical analysis (Figure 15).Step 6. Calculate the properties of each node following standard and widely-documented space syntax procedures as for any graph[1, 25]. These will begin with calculation of total depth, followed by the measures derived from this figure.
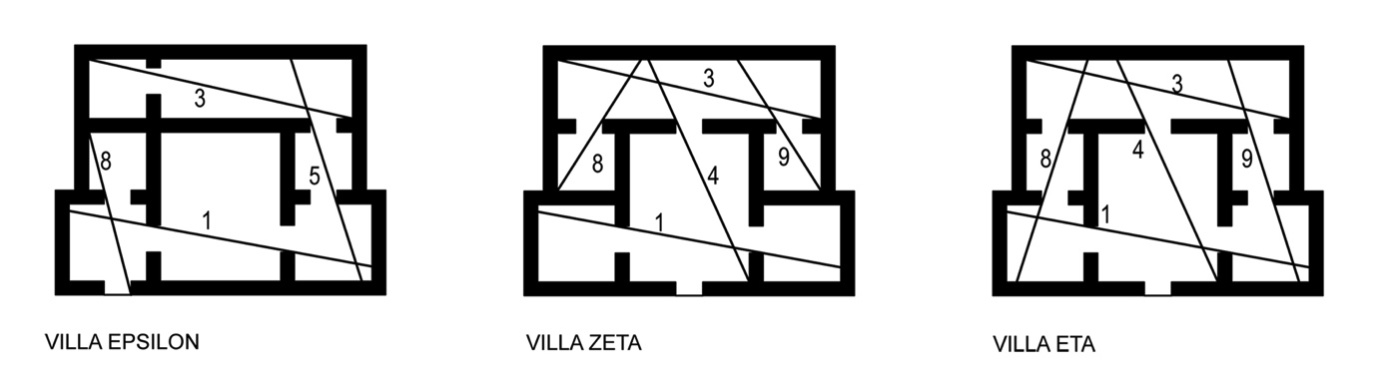 | Figure 9. Villas Epsilon, Zeta and Eta, and their axial maps, (Source: Ostwald and Dawes 2011) |
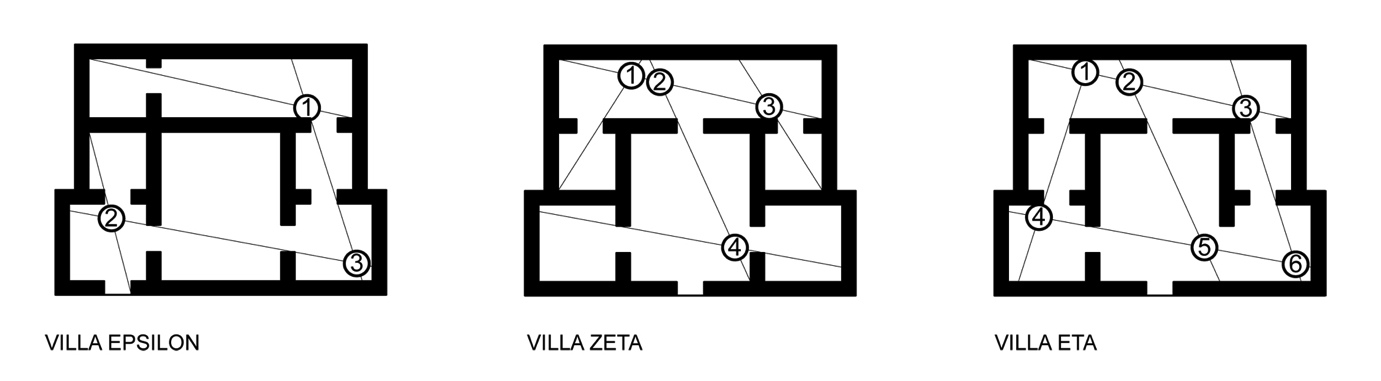 | Figure 10. Identification of intersection points and allocation of Intersection-nodes (I-Nodes) |
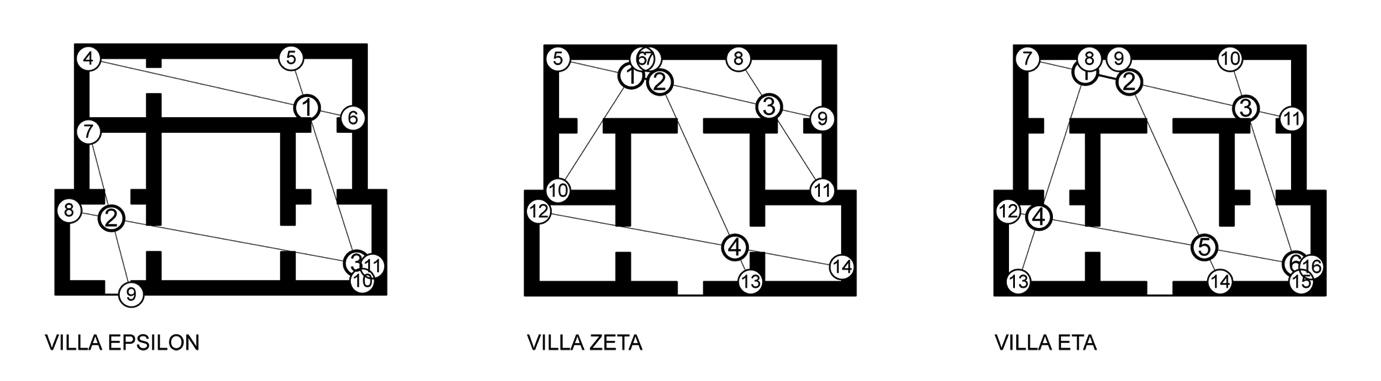 | Figure 11. Potential-nodes (P-Nodes) assigned to all stubs |
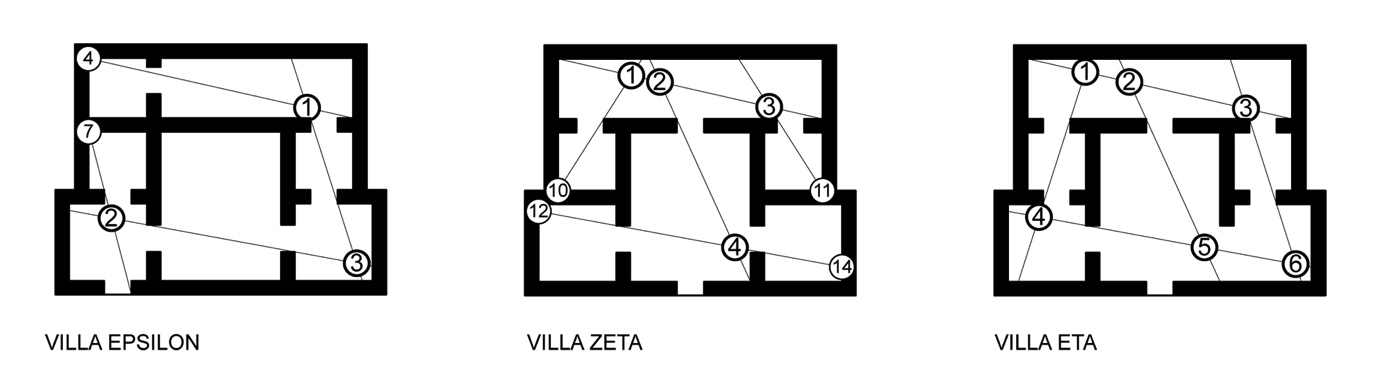 | Figure 12. Removal of P-Nodes possessing no unique surveillance properties; remaining P-nodes become Stub-nodes (S-Nodes). Villa Eta does not require S-Nodes |
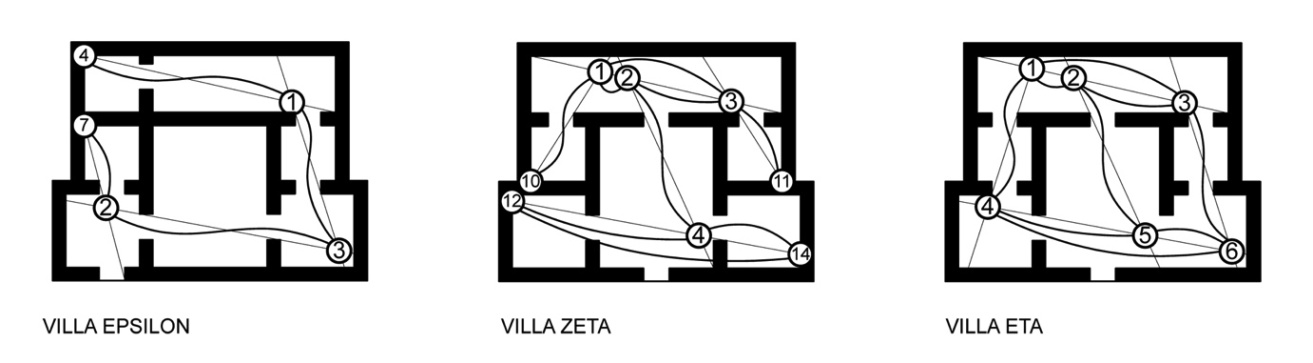 | Figure 13. Addition of links to maintain character of axial map (shown dark and curved) |
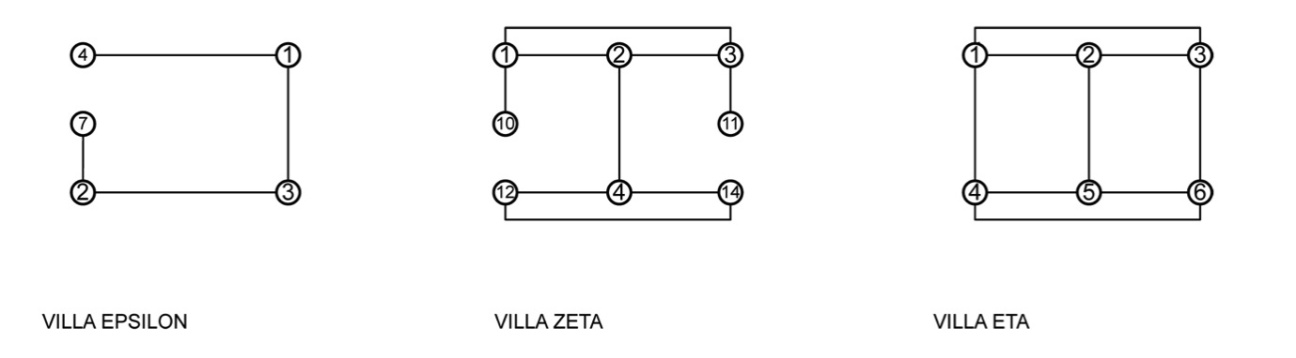
 | Figure 14. Intersection graph of Villas Epsilon, Zeta and Eta |
 | Figure 15. Intersection graphs redrawn for clarity |
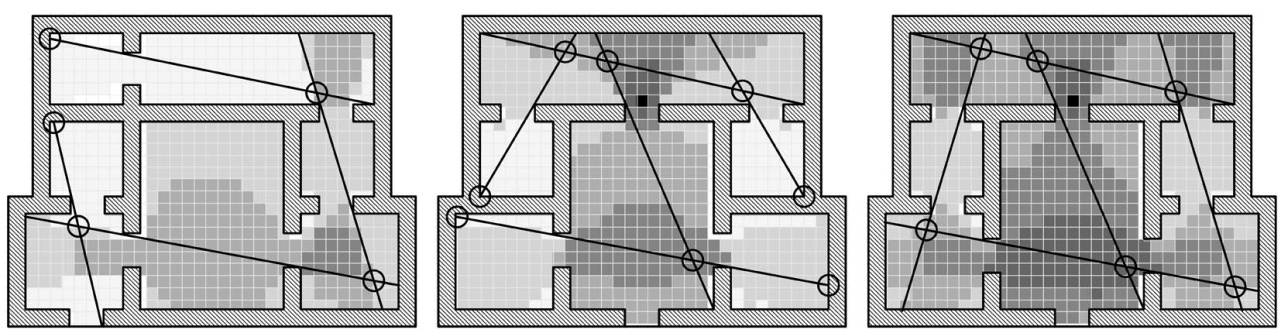 | Figure 16. Axial lines and intersection points for each villa imposed on a visibility graph analysis depicting high visual integration as darker tones |
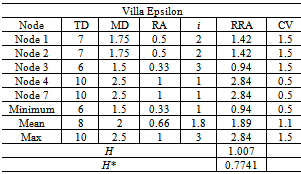
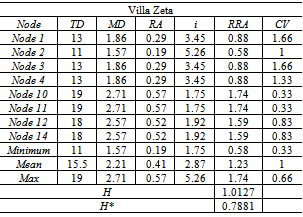
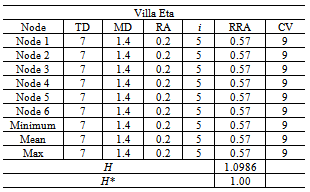
5. Results
- The results of the mathematical analysis of the intersection points of each villa are recorded in Tables 1, 2 and 3. These results are especially informative when considered in the light of the other methods of space syntax analysis. For example, consider the results of a traditional visibility graph analysis for each villa with traditional axial map and intersection points superimposed (Figure 16). The visibility graph is shaded for visual integration values and it is clear that each axial line crosses a gradient of these values yet provides only a single measure for the length of this line.
|
|
|
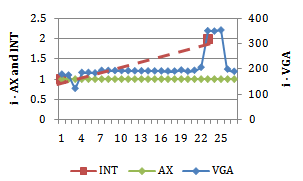 | Figure 17. Integration values for axial line (AX), intersection point (INT) and visibility graph analyses (VGA) as experienced by an occupant traversing line 3 in the villa Epsilon (moving from left to right) |
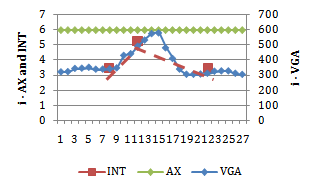 | Figure 18. Integration values for axial line (AX), intersection point (INT) and visibility graph analyses (VGA) as experienced by an occupant traversing line 3 in the villa Zeta (moving from left to right) |
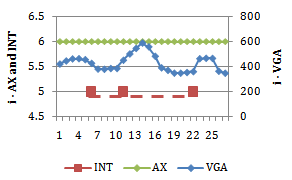 | Figure 19. Integration values for axial line (AX), intersection point (INT) and visibility graph analyses (VGA) as experienced by an occupant traversing line 3 in the villa Eta (from left to right) |
6. Conclusions
- This paper demonstrates a repeatable and rigorous procedure for analysing specific and significant locations in an architectural or urban plan, using the principles and practices of space syntax. This hybrid procedure combines lower computational needs (similar to the axial line approach) with the ability to analyse specific locations (similar to the visibility graph approach). Alternative variations of this method allow researchers to focus on particular areas of spatial interest such as locations of maximum visual information or evaluations of changes in spatial experience along the length of a single line of sight. Intersection points of long sight lines, locations of maximum visual information, become the subject of analysis using this method by excluding all axial line stubs from the graph. In contrast, including line stubs provides greater articulation of spatial experience and produces a different set of results during analysis.Being an inversion of the axial map, the intersection graph is unable to capture information that has been “lost”, through abstraction, during the axial mapping process. For example, the axial map is unable to differentiate between the spatial experience of a long corridor and of an enfilade of spaces that are traversed by a single path. Without intersection points along this line, it is not possible for the intersection graph to differentiate between the experience of these very different spaces. This does not constitute a weakness in the intersection graph method because the intersection graph is a means of assessing locations that the axial map identifies as significant. The traditional convex space or visibility graph approach is therefore a more appropriate procedure for researchers desiring to evaluate every space in an environment.Finally, the intersection graph procedure outlined in this paper suggests several future directions for research. First, while the intersection point mapping technique is derived from the process of inverting a more conventional axial map, a variation of this technique could be used to analyse the relationship between points in space identified by designers, or critics, as being significant for spatial experience. For example, as previously noted, Le Corbusier identified several important lines of sight across the grand plaza in Chandigarh, as well as multiple critical intersection points on this plaza. As Evenson notes, “[t]he generating motif of the [Chandigarh] complex, like that of the city itself, is a cross axis, but the arrangement of buildings is carefully plotted to avoid the static balance of rigid symmetry”[33 p72]. These important axes may operate as a substitute to axial lines however the mathematical analysis of these lines is unlikely to be informative and the area is too vast for visibility graph analysis. An analysis of the intersection and end-points of these axes, however, offers potentially informative results. Moreover, substitution of designed axes for axial lines becomes increasingly important in large open spaces where there are too few walls to create an unambiguous axial line map. Visibility graph analysis to identify specific and significant locations such as the intersection points of these axes is therefore unfeasible when utilising a human scale grid resolution both due to the sheer size of the spaces and to their lack of visual edges.In addition to this possible use, for the method to be more widely applied, research must be undertaken to quantify the extent of mathematical differences between axial line maps and intersection graphs of typical spatial configurations and specific architectural contexts. Further research may then establish the significance of these differences by examining the correlation between mathematical measures and rates of spatial occupation. Finally, spatial occupation research could examine the impact of including or excluding axial line stubs and whether this change results in higher correlations to spatial occupation than predicted by standard axial line maps.
ACKNOWLEDGEMENTS
- An ARC Fellowship (FT0991309) and an ARC Discovery Grant (DP1094154) supported this research.