-
Paper Information
- Previous Paper
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
Applied Mathematics
p-ISSN: 2163-1409 e-ISSN: 2163-1425
2012; 2(1): 17-20
doi: 10.5923/j.am.20120201.03
Iterated Block-Pulse Method for Solving Volterra Integral Equations
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-Text HTML
Full-Text HTMLK. Maleknejad , K. Mahdiani
Department of Applied Mathematics, Islamic Azad University, Karaj Branch, Karaj, Iran
Correspondence to: K. Maleknejad , Department of Applied Mathematics, Islamic Azad University, Karaj Branch, Karaj, Iran.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
In this paper, an iterated method is presented to determine the numerical solution of linear Volterra integral equations of the second kind (VIEs2). This method initially uses the solution of the direct method to obtain the more accurate solution. The convergence and error analysis of this method are given. Finally, numerical examples illustrate efficiency and accuracy of the proposed method. Also, the numerical results of this method are compared with the results of direct method, collocation method and iterated collocation method.
Keywords: Voltrra integral equations, Block-Pulse functions, Direct method, Iterated collocation method
Cite this paper: K. Maleknejad , K. Mahdiani , "Iterated Block-Pulse Method for Solving Volterra Integral Equations", Applied Mathematics, Vol. 2 No. 1, 2012, pp. 17-20. doi: 10.5923/j.am.20120201.03.
Article Outline
1. Introduction
- Block-Pulse functions (BPFs), a set of orthogonal functions with piecewise constant values, are studied and applied extensively as a useful tool in the analysis, synthesis, identification and other problems of control and systems science. In comparison with other basis functions or polynomials, BPFs can lead more easily to recursive computations to solve concrete problems[1] and among piecewise constant basis functions, the BPFs set has proved to be the most fundamental[2,3]. The complete details for BPFs are given in[1,4]. These functions have been directly used for solving different problems specially integral equations[5-10] as VIEs2[1] (and references therein).There are some iterated methods for solving integral equations for example the iterated collocation and Galerkin methods. These methods are studied and applied by many researchers[11,12]. Sloan[13] showed that an iterated solution of a VIE2 is always a good idea if the initial guess is the solution obtained by the Galerkin method, regardless of the size of
 With collocation, the iterated solution is not always an improvement on the original collocation solution, but it is for many cases of interest[11].In the present work, an iterated method for solving VIEs2 is applied. Using Block-Pulse functions (BPFs) and operational matrix of integration, VIE2 can be transformed to a lower triangular system of algebraic equations (direct method). Then the solution of this system is used to determine a new numerical solution of VIE2 which we call iterated Block-Pulse method. The results of convergence show that the solution of this method can be at least as rapid as that of solution of direct method.Section 2 of the paper introduces some preliminaries which are used through out this paper. The relations with small modifications of[1] are rewriten for the direct method in section 3. Then an approximation of a VIE solution is computed using iterated Block-Pulse method. The results of convergence and a error bound are given in section 4. Numerical examples in section 5 illustrate efficiency and accuracy of the proposed method at mid-point of every subinterval. These results are compared with the results of direct method, collocation method and iterated collocation method.
With collocation, the iterated solution is not always an improvement on the original collocation solution, but it is for many cases of interest[11].In the present work, an iterated method for solving VIEs2 is applied. Using Block-Pulse functions (BPFs) and operational matrix of integration, VIE2 can be transformed to a lower triangular system of algebraic equations (direct method). Then the solution of this system is used to determine a new numerical solution of VIE2 which we call iterated Block-Pulse method. The results of convergence show that the solution of this method can be at least as rapid as that of solution of direct method.Section 2 of the paper introduces some preliminaries which are used through out this paper. The relations with small modifications of[1] are rewriten for the direct method in section 3. Then an approximation of a VIE solution is computed using iterated Block-Pulse method. The results of convergence and a error bound are given in section 4. Numerical examples in section 5 illustrate efficiency and accuracy of the proposed method at mid-point of every subinterval. These results are compared with the results of direct method, collocation method and iterated collocation method.2. Preliminaries: Block-Pulse Functions
- We start by repeating some definitions, notations and basic facts; For more details see[8,15].
2.1. Definition
- Let
 denote an uniform mesh on [0,1] with
denote an uniform mesh on [0,1] with  | (1) |
 as where
as where  with a positive integer value for m.There are some properties for BPF's, the most important properties are disjointness, orthogonality and completeness.
with a positive integer value for m.There are some properties for BPF's, the most important properties are disjointness, orthogonality and completeness.2.2. Vector Form
- The set of BPF's is written as
 | (2) |
 | (3) |
 | (4) |
 is a diagonal of matrix B.
is a diagonal of matrix B.2.3. BPF's Expansion
- A function
 , can be expanded by BPF's as
, can be expanded by BPF's as  | (5) |
 | (6) |
 , can be expanded as
, can be expanded as  | (7) |
 and
and  are and dimensional BPF vectors respectively, and K is the
are and dimensional BPF vectors respectively, and K is the  Block-Pulse coefficients matrix with kij.In this work, we set
Block-Pulse coefficients matrix with kij.In this work, we set  and
and  .
.2.4. Operational matrix of integration
- Integral of
 is approximated by the following operational matrix of integration. This matrix is Teoplitze, so it can be used easily.
is approximated by the following operational matrix of integration. This matrix is Teoplitze, so it can be used easily.  | (8) |
 | (9) |
3. Method: An Iterated Method for Solving a VIEs2
- In this section, an iterated method for solving linear Volterra integral equations of the second kind (VIEs2) is introduced. Here the BPFs are used to solve a VIEs2 directly. Then by using the obtained solution of Direct method, this integral equation is solved for second time. This new approximation is often an improvement on solution of the Direct method.We consider a Volterra integral equation of second kind as
 | (10) |
 is unknown function,
is unknown function,  and
and  are known.
are known.3.1. Direct Method
- The BPFs can be used to determine the numerical solution of Eq.(10) directly. The relations with small modification of [8] can be rewritten.Setting approximation of functions f, x and k with respect to the BPFs by using (5) and (7) in Eq.(10), we have Using (3) and (9) follows: in which
 is an
is an  matrix. By Eq.(4), we have where
matrix. By Eq.(4), we have where  is an
is an  -vector with components equal to the diagonal entries of matrix
-vector with components equal to the diagonal entries of matrix  as So, Eq.(10) reduce to a linear lower triangular system as
as So, Eq.(10) reduce to a linear lower triangular system as  | (11) |
 ,
,  and where K is the m x m the Block-Pulse coefficients matrix with
and where K is the m x m the Block-Pulse coefficients matrix with  that was defined in previous section. Unknown coefficients
that was defined in previous section. Unknown coefficients  are then calculated by solving this linear equations system.
are then calculated by solving this linear equations system.  is the solution of Eq.(10) by using direct method.
is the solution of Eq.(10) by using direct method. 3.2. Iterated Block-Pulse method
- The BPFs can be used for solving Eq.(10) again. Now by using the solution of direct method, an approximation of solution x(t) of Eq.(10) is sought as
 | (12) |
 is the solution of the linear equations system (11) and
is the solution of the linear equations system (11) and  | (13) |
 , (12) and (13) can be written as
, (12) and (13) can be written as  | (14) |
 and
and  can be replaced in (14) by
can be replaced in (14) by  . This method is called the iterated Block-Pulse method.
. This method is called the iterated Block-Pulse method.4. Error Bound and Convergence of Method
- In this section, convergence of the iterated Block-Pulse method is considered. An error bound is given for obtained solution of this method. Eqs.(10) and (12) can be written in the operator form
 | (15) |
 | (16) |
 , then the convergence of
, then the convergence of  to
to  is at least as rapid as that of
is at least as rapid as that of  to x.
to x.5. Numerical Examples
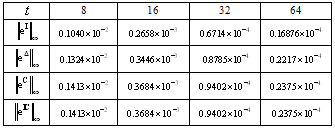
- In this section, the proposed method is used to determine the numerical solution of some examples. The numerical results are given in the tables for the error of approximation at the mid-point of every subinterval with
 . These results are compared with the results of direct, collocation and iterated collocation methods. The maximum norm of error for iterated Block-Pulse, direct, collocation and iterated collocation methods is denoted with
. These results are compared with the results of direct, collocation and iterated collocation methods. The maximum norm of error for iterated Block-Pulse, direct, collocation and iterated collocation methods is denoted with  ,
,  ,
,  and
and  , respectively. In the collocation method, BPFs are applied as a set of basis functions.Example 1. Consider the Volterra integral equation of second kind [5]: where
, respectively. In the collocation method, BPFs are applied as a set of basis functions.Example 1. Consider the Volterra integral equation of second kind [5]: where  . The exact solution of this equation is
. The exact solution of this equation is  .See Table 1 for numerical results of the maximum norm of error by using four methods at mid-point of every subinterval. The results show that the error of the iterated Block-Pulse method is smaller than the error of the direct method.The collocation method and the iterated collocation method have the same results. The error of the iterated Block-Pulse method is smaller than the error of the iterated collocation method.
.See Table 1 for numerical results of the maximum norm of error by using four methods at mid-point of every subinterval. The results show that the error of the iterated Block-Pulse method is smaller than the error of the direct method.The collocation method and the iterated collocation method have the same results. The error of the iterated Block-Pulse method is smaller than the error of the iterated collocation method.
|
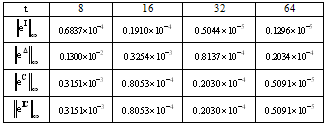
 , the exact solution is
, the exact solution is  .Table 2 shows numerical results for the maximum norm of error by using four methods at the mid-point of every subinterval. The maximum norm of error for the iterated Block-Pulse method is smaller than all the others. But, the numerical results for this example are very close to each other.
.Table 2 shows numerical results for the maximum norm of error by using four methods at the mid-point of every subinterval. The maximum norm of error for the iterated Block-Pulse method is smaller than all the others. But, the numerical results for this example are very close to each other.
|
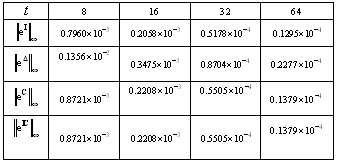
 has the exact solution
has the exact solution  . See Table 3 for numerical results of the maximum norm of error by using four methods at the mid-point of every subinterval. The maximum norm of error for the iterated Block-Pulse method is smaller than all the others. But, the numerical results for this example are very close to each other.
. See Table 3 for numerical results of the maximum norm of error by using four methods at the mid-point of every subinterval. The maximum norm of error for the iterated Block-Pulse method is smaller than all the others. But, the numerical results for this example are very close to each other.
|
6. Conclusions
- In the present paper, a new iterated method for solving VIEs2 using BPFs was proposed. This method initially used the solution of the direct method to obtain the more accurate solution. The convergence and error analysis of this method were given. The results of convergence showed that the solution of this method can be at least as rapid as that of direct method. The numerical results of this method were compared with direct, collocation and iterated collocation methods. Similar to the iterated collocation method, the iterated solution is not always an improvement on the original direct solution, but it is for many cases of interest.