-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
American Journal of Signal Processing
p-ISSN: 2165-9354 e-ISSN: 2165-9362
2016; 6(2): 56-65
doi:10.5923/j.ajsp.20160602.03

A SVM Algorithm for Investigation of Tri-Accelerometer Based Falling Data
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLThanh Hai Nguyen1, Ty Phu Pham1, Cuong Q. Ngo1, Thanh Tam Nguyen2
1Faculty of Electric-Electronic Engineering, HCMC University of Technology and Education, Vietnam
2Biomedical Engineering Department, International University, VNU, HCMC, Vietnam
Correspondence to: Thanh Hai Nguyen, Faculty of Electric-Electronic Engineering, HCMC University of Technology and Education, Vietnam.
| Email: |  |
Copyright © 2016 Scientific & Academic Publishing. All Rights Reserved.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

Falling in elderly people is one of the main reasons causing serious injuries and increasing the risk of early death. Moreover, it can result in psychological problems from fear of falling. An automatic fall detection system is necessary for elderly people in daily activity alone. In this paper, a fall detection system applying a Support Vector Machine (SVM) algorithm is proposed for fall recognition. Data with different states collected by a trial-axis accelerometer system will be pre-processed using a mean filter for smoothing. In addition, features of the filtered signals will be extracted using a Principal Component Analysis (PCA). Therefore, the SVM will be employed to train feature data and then recognize fall states. Experiments will be performed many trials with eight different states on a subject and results will be processed to detect falling as well as to evaluate the accuracy of the proposed method.
Keywords: Tri-accelerometer data, Support Vector Machine, Principal Component Analysis, Fall Recognition
Cite this paper: Thanh Hai Nguyen, Ty Phu Pham, Cuong Q. Ngo, Thanh Tam Nguyen, A SVM Algorithm for Investigation of Tri-Accelerometer Based Falling Data, American Journal of Signal Processing, Vol. 6 No. 2, 2016, pp. 56-65. doi: 10.5923/j.ajsp.20160602.03.
Article Outline
1. Introduction
- Falls are common accidents and dangerous in daily activity of people. Unlike young adults, older people are no longer flexibility and reflex, consequently the risk of falls is very high. According to a report by the World Health Organization (WHO) [1] falling increases with age: about 28-35% of people over age 65 fall 2-4 times per year and rising 32-42% people over the age of 70 falling down 5-7 times. Thus the results of falling were injured and more serious as mortality, in which the most common situation is broken bone or another problems such as fractured femur, humorous, traumatic brain injury, and subdural hematoma. Therefore the victim early detection can be the difference between life and death. Indirect impacts on society are health care costs, lost income due to caring relatives of victims. Because of the serious consequences such as a fall should occur, the elderly people need to get medical care immediately.There have been many research projects with high technical equipment for the purpose of monitoring the activities of the elderly in recent years. Prediction and detection of falls could be required to attend an alarm for the surrounding health workers to timely emergency. In particular, a fall detection system is often one of three types: environmental sensing [2], image sensing, and the wearable sensor [3, 4]. In each way, it has a significant application to each elderly person.In the case of the environmental sensing method, sensors such as infrared sensors, vibration sensors, pressure sensor are often employed. The event detection using vibration sensors is very effective in the case of surveillance, monitoring and locating. A totally passive and simple system to detect vibrations in the floor was introduced by Alwan [5]. This detection system of falls was evaluated based on the vibration on the floor. It means that the level of the floor vibration generated by the falls is classified from the normal operation, such as walking. In an another study, a vibration sensor of the floor with a sound sensor was employed [6] to analyze spectrum to evaluate the fall. The advantage of using the environmental sensors is that users do not have to wear any devices on their body and this system is only effective in the established space.Image sensors such as stereo cameras are increasingly used in the system of care and support in families. There are many advantages in comparison with other sensor systems. In particular, an image processing system allows to extract pixels from the background and the contrast of time corresponding to the change in reflectance of light [7]. A motion vector is calculated to indicate the object with fall or normal activity. Moreover, detection of falls is based on the change of body shape in the obtained image. From the motion data, the system space model is obtained automatically by combining a Gaussian Bayesian estimation method and a model describing the minimum length [8]. The system detects the abnormal states through the contextual model, such as a fall compared with normal operations. Forough [9] adopted an ellipse approximately around the body to measure the change in shape. Data is analyzed in both horizontal and vertical directions. The feature vector is fed into a neural network to classify the body states. Another research is that an Omni camera was used to detect falls [10]. The system could recognize the falls based on the changes with a threshold. However, the main drawback of this method is the use of camera time and the cost of system [11]. In addition, the use of the camera system affected the privacy of users.Many researchers have used the wearable sensors, such as accelerometer or gyroscope to determine the location and the orientation of the motion object in recent years. The system can detect falls through wireless communication and allow users to be comfortable in daily activity with a cheaper cost device. Fall detection can be divided into two approaches: data analysis using threshold and identification using machine learning algorithms. The proposed system of Ye [12] combined the threshold and the angle of the wearer. Thereby, the position and status as “go” or “stand” can be determined. A Bourke’s study [13] compared a threshold method with other methods such as amplitude, angle, and vertical velocity to find an optimal performance. An MMA 7260Q accelerometer was worn on the arm of the subject to recognize falls [14]. This module transfers data to a computer for signal processing through the ZigBee standard. Thus, the identification method used a threshold consisting of two levels: the upper limit and lower limit. Acquired data was divided into two categories: the normal operation (activities of Daily Living -ADL) and falling.Machine learning methods are often used for identifying the motion of body [15], in which the experiment simulated six-state activities: “fall”, “lie down”, “sit down”, “stand”, “go”, “sit” and “lie down”. In case of data without noisy, most methods of identification give good results (the accuracy of 95%), except the C4.5, RIPPER method and the Naïve Bayes method. The accuracy of the fall detection system using accelerometer sensors often depends on the position wearing sensor. The authors [16] verified four sensors of tongue strap and four different locations on the body: chest, hip, ankle, on right thigh.The two sensors, one at the chest and one at the chest strap - right thigh have the maximum efficiency.In this work, a tri-accelerometer sensor which was located on the waist of body was used to collect acceleration data from a subject. A Support Vector Machine (SVM) will be applied to validate the obtained coefficient data for falling recognition. Firstly, data is acquired from daily activities such as “sitting”, “standing”, “walking”, “stooping”, “bending”, and falls from chair. Secondly, features, that describe the person movement during a series of short time periods, were extracted using a Principal Component Analysis (PCA) algorithm. The feature extraction stage allows one to select relevant and more meaningful characteristics that are fed into the next step of a recognition system. The rest of this paper is organized as follows: Section 2 introduces a data acquisition process and a fall detection system with a dataset trained for the recognition process of falling. Section 3 presents the experiment results. Finally, conclusion in the paper is Section 4.
2. Materials and Methods
2.1. System Design
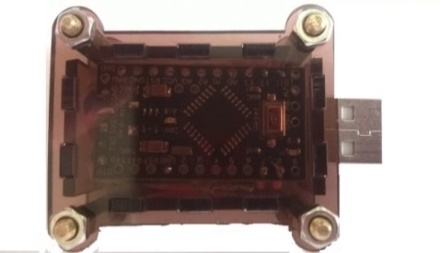
- The proposed recognition system consists of two modules: a sensor module and a receiver module of computer interaction. The sensor module has three parts including an ADXL-345 sensor, an Arduino Pro Mini controller module, and an nRF24L transceiver module as described in Figure 1. The receiver module is composed of an Arduino Pro Mini controller module, and an nRF24L transceiver module as described in Figure 2. In particular, the receiver is connected to a personal computer using a UART interface with parameters: Baudrate-115200, DataBits-8, Parity-None, StopBits-1.
 | Figure 1. Sensor module ADXL 345 |
 | Figure 2. Receiver module plugged in computer |
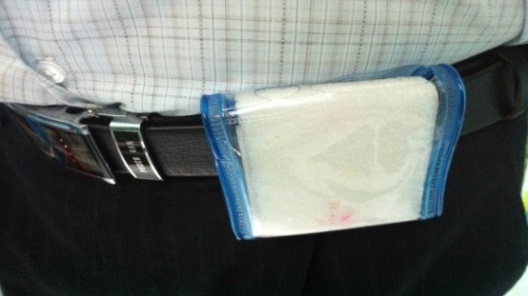 | Figure 3. Sensor module is installed with the belt at the body waist |
2.2. Data Pre-Processing
- Data obtained from the acceleration sensor have noise from the heart rate and respiration. Therefore, a moving average filter is used for signal conditioning. This filter operates on the principle that each output value is calculated using the average of a number of input values and its formula is expressed as follows:
 | (1) |
 is the input signal,
is the input signal,  is the output signal and M is the number of points. In this research, the value of M is 5. Figure 4 illustrated the value of the effective acceleration in the case of fall from seat state with M = 5, in which the blue curve signal is the origin while the signal in red is the output of the average filter.When the window size is increasingly adjusted, the signal is flattened much more, particularly it is in the range from 1 to 2.5 seconds. However, the choice of the window size must be carefully selected so that the detection system is the higher accuracy. If the size is smaller, noise of the signal could still immerse and this will affect falling recognition.
is the output signal and M is the number of points. In this research, the value of M is 5. Figure 4 illustrated the value of the effective acceleration in the case of fall from seat state with M = 5, in which the blue curve signal is the origin while the signal in red is the output of the average filter.When the window size is increasingly adjusted, the signal is flattened much more, particularly it is in the range from 1 to 2.5 seconds. However, the choice of the window size must be carefully selected so that the detection system is the higher accuracy. If the size is smaller, noise of the signal could still immerse and this will affect falling recognition.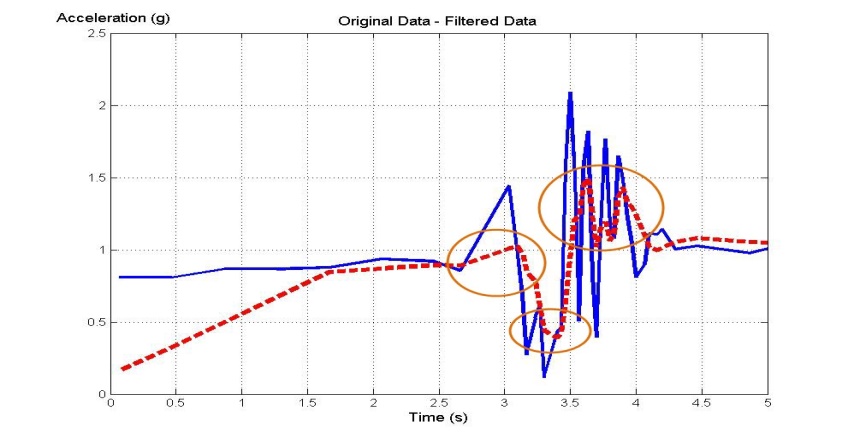 | Figure 4. Acceleration signal in the case of the front seat and after falling with M = 5 |
2.3. Fall Detection Algorithm using Threshold
- A falling detection system based on a threshold algorithm is applied to study the data set obtained from the daily routine to find the case of falls. A factor of signal amplitude used to represent all changes in three-axis signals has been suggested in some previous studies [4, 17]. In particular, it is the normalized signal amplitude (Signal Magnitude Area - SMA), and calculated as follows:
 | (2) |
 ,
,  , and
, and  are accelerations measured in the domain time corresponding to the three axes X, Y, and Z, respectively.Therefore, the falling detection system based on the comparison of the SMA value and a threshold are shown in Figure 5.
are accelerations measured in the domain time corresponding to the three axes X, Y, and Z, respectively.Therefore, the falling detection system based on the comparison of the SMA value and a threshold are shown in Figure 5.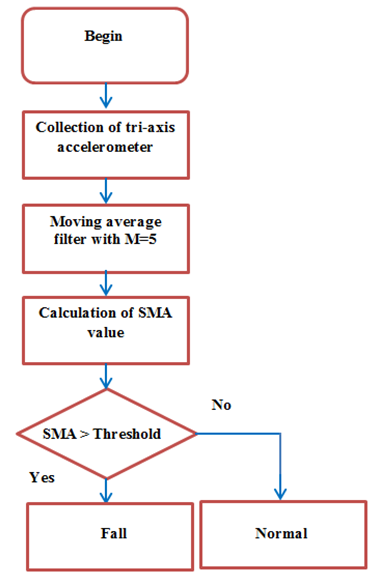 | Figure 5. Block diagram of the falling detection using a threshold method |
|
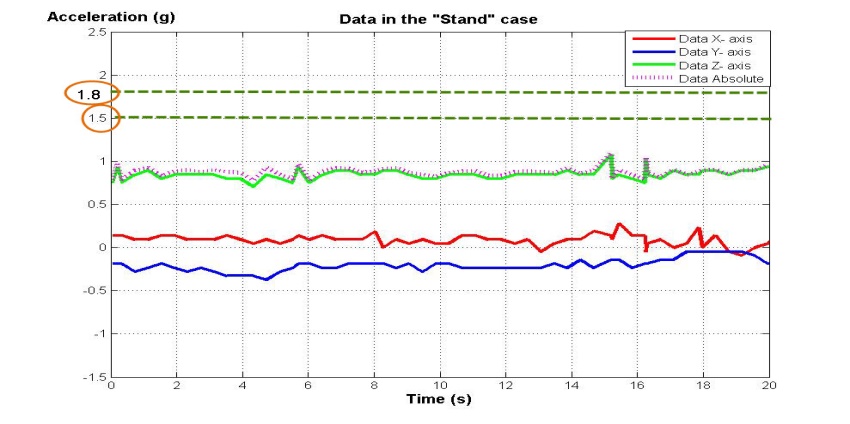 | Figure 6. The acceleration signals in case of “stand” are compared with the two thresholds |
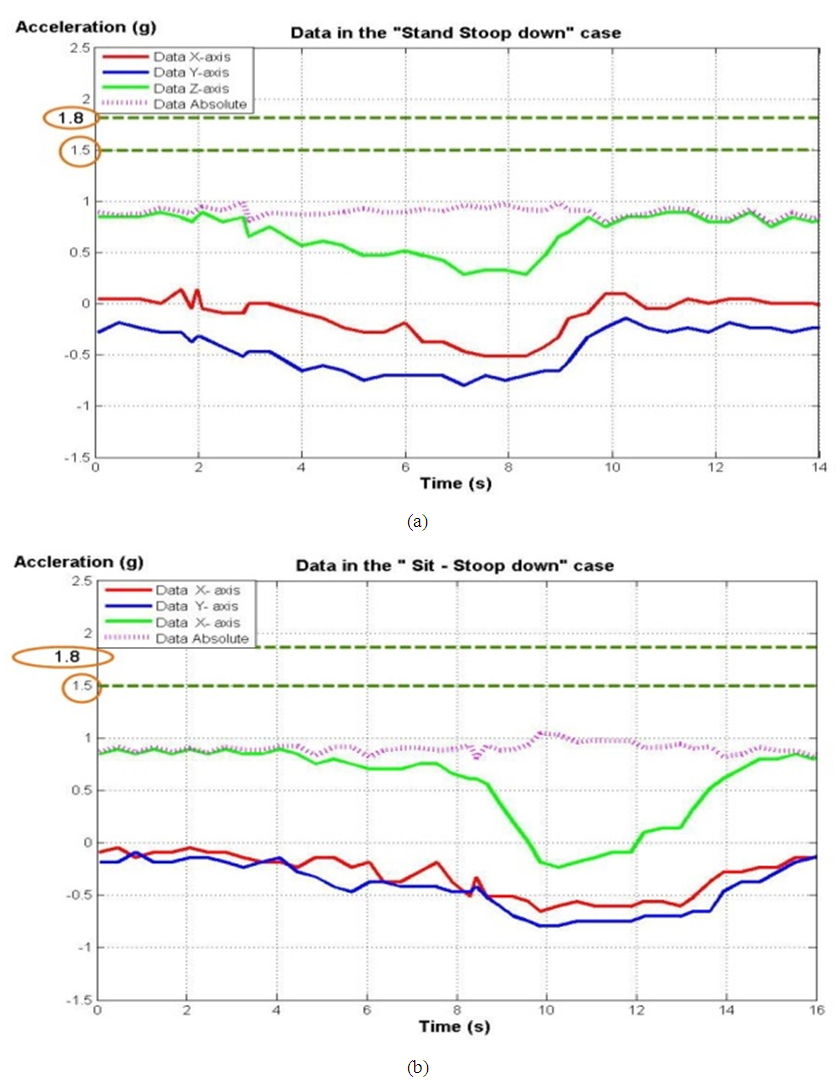 | Figure 7. The acceleration signals in two cases: (a) Stooping, (b) Bending |
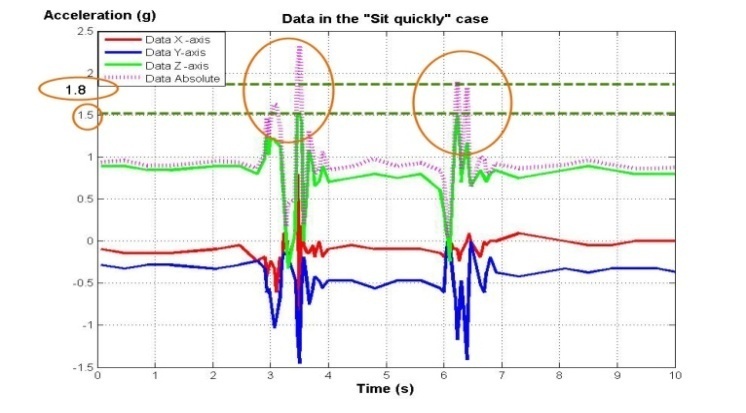 | Figure 8. The acceleration signals in the case of moving foster versus the sitting threshold |
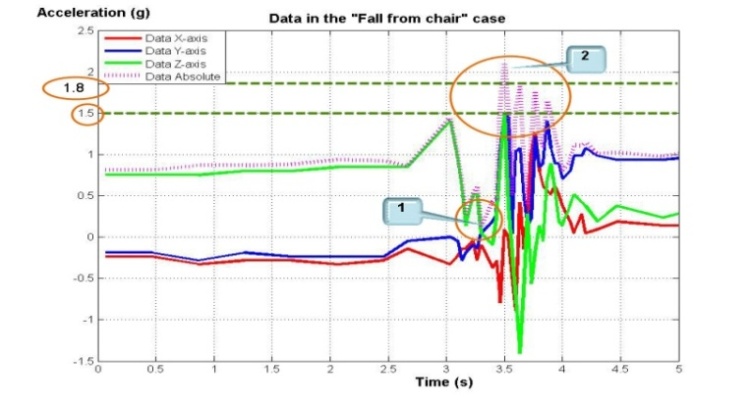 | Figure 9. The acceleration signals in case of falling from a chair |
2.4. Recognition Algorithm using the SVM
- A PCA method is proposed to be the best technique in multivariate analysis [21]. The main purpose of this method is to reduce the dimensionality of a data set with many variables that retains the inherent variability in the data set. The dimensionality reduction is performed by transforming data into a new set of variables containing the main components.Assumed that we have the data set as the matrix X (size of mn), with n is the number of experiments, m describes the number of samples in an experiment. The first step of the PCA algorithm is to standardize data and expressed as follows:
 | (3) |
 | (4) |
 is a matrix with m rows and n columns, and
is a matrix with m rows and n columns, and  is the ith dimension.Thirdly, the eigenvectors and eigenvalues of the covariance matrix are calculated to collect the following characteristic polynomial:
is the ith dimension.Thirdly, the eigenvectors and eigenvalues of the covariance matrix are calculated to collect the following characteristic polynomial: | (5) |
 is called the eigenvalue of C. Thus, we can find eigenvalues which satisfy the following equation:
is called the eigenvalue of C. Thus, we can find eigenvalues which satisfy the following equation: | (6) |
 is the eigenvector associated with the eigenvalue
is the eigenvector associated with the eigenvalue  . The final step of the PCA is to choose components and to form a feature vector. The eigenvector with the highest eigenvalue is the principle component of the data set. The eigenvectors are ordered by their eigenvalues from highest to lowest deriving the new data set. We can choose the components that to be kept in new data set and form a feature vector as follows:
. The final step of the PCA is to choose components and to form a feature vector. The eigenvector with the highest eigenvalue is the principle component of the data set. The eigenvectors are ordered by their eigenvalues from highest to lowest deriving the new data set. We can choose the components that to be kept in new data set and form a feature vector as follows: | (8) |
|
 . The points x which lie on the hyper plane satisfy
. The points x which lie on the hyper plane satisfy  , in which
, in which  is the distance from the hyper plane to the origin and
is the distance from the hyper plane to the origin and  is the Euclidean norm of
is the Euclidean norm of  . Let
. Let  is the shortest distance from the separation hyper plane to the closest positive (negative) samples corresponding to the coefficients of fall events and daily activity, respectively.Assume that the margin of the hyper plane is
is the shortest distance from the separation hyper plane to the closest positive (negative) samples corresponding to the coefficients of fall events and daily activity, respectively.Assume that the margin of the hyper plane is  in the linear case, the support vector looks for the separating hyper plane with the largest margin using the primal Lagrangian. Suppose that all training data satisfy the following constraints:
in the linear case, the support vector looks for the separating hyper plane with the largest margin using the primal Lagrangian. Suppose that all training data satisfy the following constraints: | (9) |
 | (10) |
 | (11) |
 with respect to
with respect to  and then getting the results to zeros, we have the following equation:
and then getting the results to zeros, we have the following equation: | (12a) |
 | (12b) |
 | (13) |
 is of the falls; similarly D− has the coefficients and
is of the falls; similarly D− has the coefficients and  is of daily activities. Based on these theories, as well as the observations are made in the proposed identification algorithm of falls using the PCA-SVM. First, the acquired data must be pre-processed by the moving average filter to reduce noise. Then, accelerated features will be extracted using the PCA to find specific coefficients. Finally, with these coefficients, one can base on a SVM classification system to identify the subject falls or not as illustrated in Figure 10.
is of daily activities. Based on these theories, as well as the observations are made in the proposed identification algorithm of falls using the PCA-SVM. First, the acquired data must be pre-processed by the moving average filter to reduce noise. Then, accelerated features will be extracted using the PCA to find specific coefficients. Finally, with these coefficients, one can base on a SVM classification system to identify the subject falls or not as illustrated in Figure 10.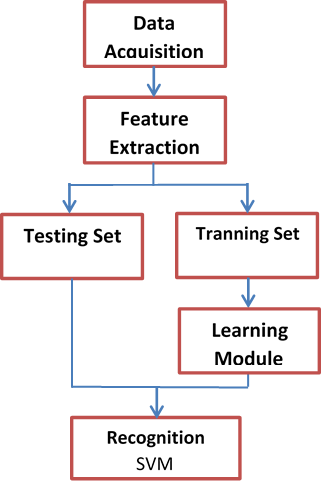 | Figure 10. Block diagram of fall recognition using the SVM |
|

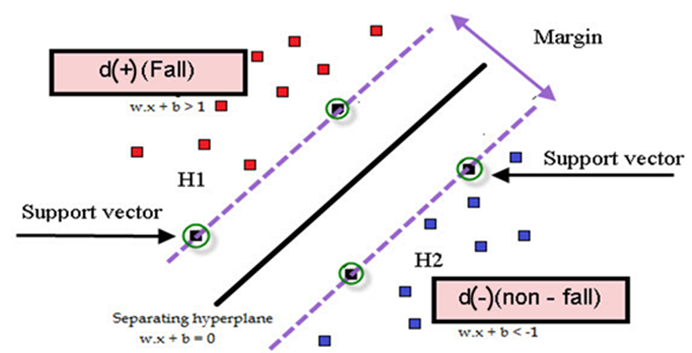 | Figure 11. Labeled characteristics based on hyper plane in the SVM algorithm |
3. Results and Discussion
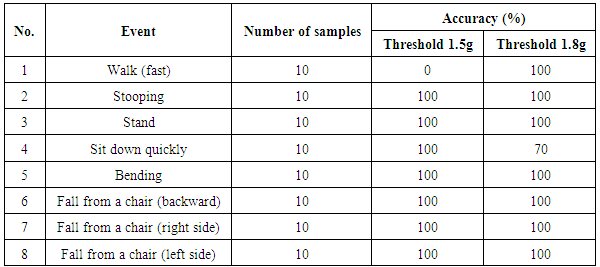
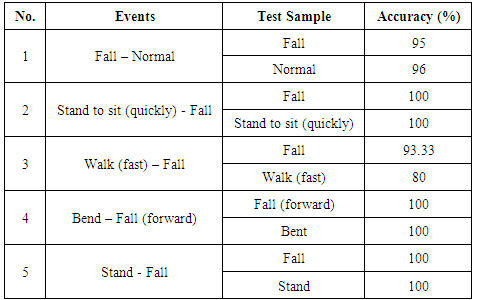
- In this paper, the experimental results with different states in real time were performed. Features of fall states were then extracted using the PCA algorithm and the SVM method was applied to recognize the fall state based on these features. Eight experiments were performed to analyze the difference between fall and non-fall states, in which every fall state is compared and recognized with a non-fall using the SVM. The accuracy of the PCA-SVM method is shown in Table 4, in which the accuracy of all identified cases is from 80 to 100%. In this table, there are many fall pairs with the accuracy of 100% such as “Fall-Stand to sit”, “Fall-Bent” and “Fall-Stand”. This means that the proposed method for recognition of these experimental activities produces the very high performance.
|
|
|

|

4. Conclusions
- Data was collected from a tri-accelerometer sensor system mounted on body of a male subject with eight daily activities such as “Fall-Normal”, “Stand to sit-Fall”, “Walk (fast)-Fall”, “Bend-Fall (forward)” and “Stand-Fall”. For filtering noisy signals, a moving average filter was applied. In addition, a PCA algorithm was employed to extract features of the filtered falling data. For evaluation of falling states, the threshold and SVM methods were utilized and compared to find the higher identified performance. Therefore, the threshold approach with the calculation of low cost produced the higher average accuracy of 96.25% compared to the SVM.
Appendix
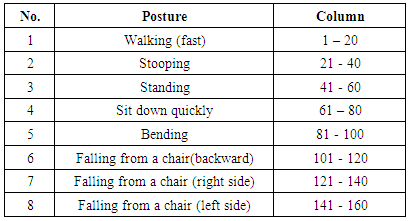
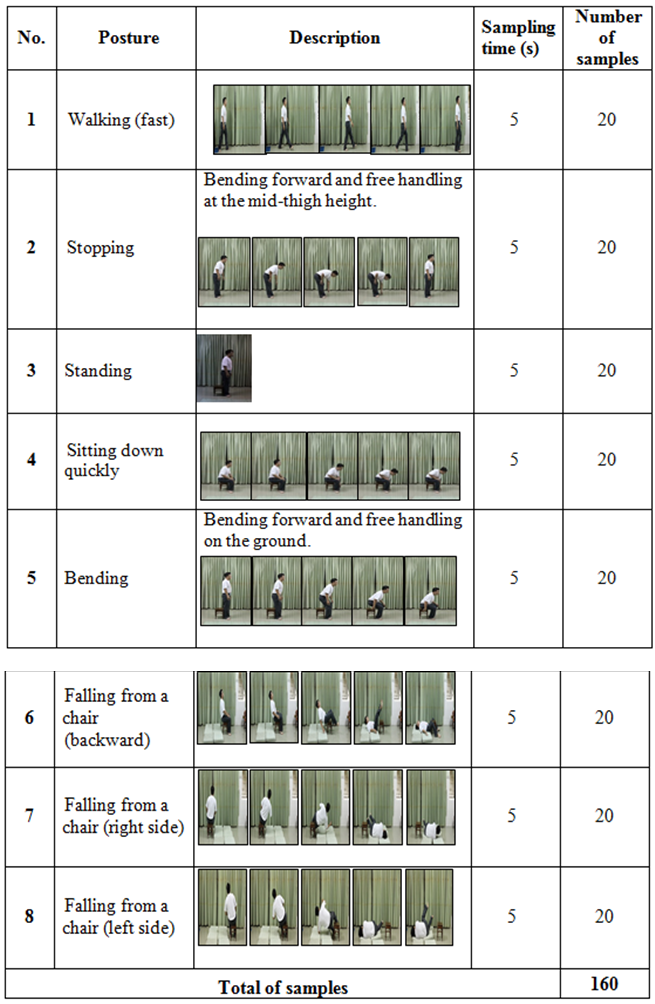 | Description of the protocol for data acquisition is presented as follows: |
ACKNOWLEDGEMENTS
- We would like to thank Vietnam National University, Ho Chi Minh City (VNU-HCMC) for supporting research grant No. C2014-28-06. Furthermore research was partly supported by a research fund from Biomedical Engineering, International University (IU) in Ho Chi Minh City. Finally, an honorable mention goes to our volunteers, families and friends for their supports on us in completing this project.