Li Tan , Jean Jiang
College of Engineering and Technology, Purdue University North Central, Westville, USA
Correspondence to: Li Tan , College of Engineering and Technology, Purdue University North Central, Westville, USA.
| Email: |  |
Copyright © 2015 Scientific & Academic Publishing. All Rights Reserved.
Abstract
This paper proposes a new adaptive harmonic IIR notch filter utilizing the simplified gradient update to achieve robust frequency estimation and tracking. The developed algorithm has ability to prevent the adaptive algorithm from converging to its local minima of the MSE function due to signal fundamental frequency switches in the tracking process. In addition, a formula to determine the stability bound for applying the least mean squares (LMS) algorithm is derived. Computer simulations validate the developed algorithm.
Keywords:
Adaptive filter, LMS algorithm, Frequency tracking, Harmonic notch filter
Cite this paper: Li Tan , Jean Jiang , Simplified Gradient Adaptive Harmonic IIR Notch Filter for Frequency Estimation and Tracking, American Journal of Signal Processing, Vol. 5 No. 1, 2015, pp. 6-12. doi: 10.5923/j.ajsp.20150501.02.
1. Introduction
Frequency tracking in presence of harmonic distortion and noise has been attracted much research attention [1-6], where various adaptive IIR notch filters are applied. In general, if a signal to be estimated is subjected to nonlinear effects in which possible harmonic frequency components are generated, a higher-order notch filter, which is constructed by cascading second-order infinite impulse response (IIR) notch filters, can be employed to estimate the signal frequency including any harmonic frequencies. The general IIR notch filter method [1-7] uses more filter coefficients and the corresponding adaptive algorithm may converge to local minima of the mean square error (MSE) function due to signal frequency changes. A low-cost adaptive harmonic IIR notch filter with a single adaptive parameter [8, 9] has recently been proposed to efficiently perform frequency estimation and tracking in a harmonic frequency environment. The proposed least mean square (LMS) algorithm begins with an optimal initial parameter, which is estimated based on a block of input samples, to prevent the algorithm from converging to the local minima. However, when the signal fundamental frequency switches during the tracking process, the global minimum of the MSE function will suddenly be changed. In this scenario, the LMS algorithm may converge to the local minima with a wrong estimated frequency value or the algorithm could start at the point of the MSE function with a very low gradient so that the algorithm suffers from a slow convergence rate [10].A simple scheme [10] is first devised to monitor the global minimum of the MSE function; and it will reset the adaptive parameter using its new estimation whenever a possible local minimum is detected.In this paper, a new simplified gradient algorithm based on the direct form II structure [11] is proposed for the adaptive harmonic IIR filter. The proposed algorithm has less computation requirement. The stability bound for convergence in mean is derived. The computer simulations validate the developed algorithm.
2. Adaptive Harmonic IIR Notch Filter and Proposed Algorithm
2.1. Simplified Gradient Adaptive Harmonic IIR Notch Filter
The adaptive harmonic IIR notch filter proposed in [8] and [9] has the following form: | (1) |
where  denotes the mth 2nd-order IIR sub-filter whose transfer function is defined as
denotes the mth 2nd-order IIR sub-filter whose transfer function is defined as | (2) |
Using a direct form II structure as described in [11], the filter output  at the mth sub-filter can be expressed as
at the mth sub-filter can be expressed as | (3) |
 | (4) |
The corresponding difference equations are given as | (5) |
 | (6) |
 with
with  . Note that the transfer function in (1) has only one adaptive parameter
. Note that the transfer function in (1) has only one adaptive parameter  , and has zeros on the unit circle resulting in infinite-depth notches. The parameter
, and has zeros on the unit circle resulting in infinite-depth notches. The parameter  controls the notch bandwidth. It requires
controls the notch bandwidth. It requires  for achieving narrowband notches. When is close to 1, the 3-dB notch bandwidth can be approximated as
for achieving narrowband notches. When is close to 1, the 3-dB notch bandwidth can be approximated as  [11]. The MSE function,
[11]. The MSE function,  , at the final stage is minimized using the LMS algorithm, where
, at the final stage is minimized using the LMS algorithm, where  . Once the adaptive parameter
. Once the adaptive parameter  is adapted to the angle corresponding to the signal fundamental frequency, each
is adapted to the angle corresponding to the signal fundamental frequency, each 
 will automatically lock to its harmonic frequency. The LMS update equation is given below:
will automatically lock to its harmonic frequency. The LMS update equation is given below: | (7) |
Where  is the gradient term for the mth sub filter defined as
is the gradient term for the mth sub filter defined as | (8) |
When  is a slowly varying process, the following approximations can be assumed:
is a slowly varying process, the following approximations can be assumed: Taking derivatives of (5) and (6) yields
Taking derivatives of (5) and (6) yields  | (9) |
 | (10) |
Substituting (8) and (9) in (10) leads to a simplified gradient update: | (11) |
 with
with  , and
, and  is the convergence factor. Since the MSE function is a nonlinear function of the single adaptive parameter
is the convergence factor. Since the MSE function is a nonlinear function of the single adaptive parameter  , the algorithm may converge to one of the local minima due to the inappropriately chosen initial value of
, the algorithm may converge to one of the local minima due to the inappropriately chosen initial value of  . To prevent local convergence, the algorithm will start with an optimal initial value
. To prevent local convergence, the algorithm will start with an optimal initial value  , which is coarsely searched over the frequency range [8]:
, which is coarsely searched over the frequency range [8]:  , as follows:
, as follows: | (12) |
where the estimated MSE function,  , can be determined by using a block of
, can be determined by using a block of  signal samples:
signal samples: | (13) |
2.2. Global Minimum Monitoring and Resetting
When the signal fundamental frequency switches, the algorithm may suffers from a local minimum convergence with a wrong frequency value or a slow convergence rate, as described in [10]. To prevent the problem of local minimum convergence, the global minimum is monitored by comparing the frequency deviation | (14) |
with a maximum allowable frequency deviation chosen below: | (15) |
where  Hz is the pre-scanned optimal frequency via (12) and (13),
Hz is the pre-scanned optimal frequency via (12) and (13),  denotes the sampling rate in Hz, and
denotes the sampling rate in Hz, and  is the 3-dB bandwidth of the notch filter, which is approximated by
is the 3-dB bandwidth of the notch filter, which is approximated by  in Hz. If
in Hz. If  , the adaptive algorithm may have a chance to converge to its local minima. In this case, the adaptive parameter
, the adaptive algorithm may have a chance to converge to its local minima. In this case, the adaptive parameter  needs to be reset to its new estimated optimal value
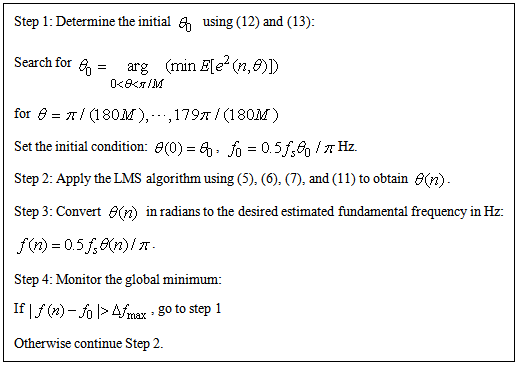
needs to be reset to its new estimated optimal value  using (12) and (13) and then the algorithm will resume frequency tracking from the neighborhood of the global minimum. The algorithm is then summarized in Table 1.
using (12) and (13) and then the algorithm will resume frequency tracking from the neighborhood of the global minimum. The algorithm is then summarized in Table 1.Table 1. Simplified Gradient Adaptive Harmonic IIR notch LMS Algorithm
 |
| |
|
The simplified gradient algorithm for the mth sub filter only requires four multiplications and one sine function operation for the gradient term update.
2.3. Stability Bounds
To determine a simple upper bound for (7), the existing approach in [2-4] are used. For simplicity, the second and higher order terms are omitted in the Taylor series expansion of the filter transfer function to avoid complicated algebra. Consider the frequency response for the mth section: | (16) |
Taking derivative of  and setting
and setting  leads to
leads to | (17) |
Since | (18) |
Substituting (17) to (18) leads to | (19) |
Thus the frequency responses at the harmonic frequencies are given by | (20) |
Notice that  and
and  are the magnitude and phase frequency responses defined below:
are the magnitude and phase frequency responses defined below: | (21) |
 | (22) |
Appling the first-order Tylor series expansion yields | (23) |
Now, consider the input signal  with each harmonic amplitude
with each harmonic amplitude  and phase
and phase  as
as | (24) |
where  is the white Gaussian noise. Similar to [2, 3], we can approximate the harmonic IIR notch filter output as
is the white Gaussian noise. Similar to [2, 3], we can approximate the harmonic IIR notch filter output as | (25) |
where  is the filter output noise and note that
is the filter output noise and note that | (26) |
Applying recursion (11), the simplified gradient function at the last section  can be found as
can be found as | (27) |
The z-transform of gradient function  is expressed as
is expressed as | (28) |
Let us define the gradient transfer function as | (29) |
Then we have | (30) |
Using the definition in (1), the gradient transfer function at the last section is expressed as | (31) |
or  | (32) |
with  . Note that at the optimal point,
. Note that at the optimal point,  ,
, | (33) |
 | (34) |
where  and
and  are the magnitude and phase frequency responses of
are the magnitude and phase frequency responses of  . It can be easily verified that these points are essentially the centers of band-pass filters [4]. The gradient filter output can be approximated by
. It can be easily verified that these points are essentially the centers of band-pass filters [4]. The gradient filter output can be approximated by | (35) |
where  is the noise output from the gradient filter.Taking expectation of (7) yields
is the noise output from the gradient filter.Taking expectation of (7) yields  | (36) |
where the second expected term on the right hand side in (36) can be derived as | (37) |
Assuming that  is independent of
is independent of  ,
, and
and  , then (37) becomes
, then (37) becomes | (38) |
Subtracting the optimal  from both sides of (36) leads to the following:
from both sides of (36) leads to the following: | (39) |
Assuming that  (uncorrelated), and
(uncorrelated), and  (zero mean of output noise), and substituting (38) in (39), we achieve
(zero mean of output noise), and substituting (38) in (39), we achieve | (40) |
Then the stability bound in the mean convergence requires | (41) |
Neglecting the cosine term in (42), a more conservative upper bound can be yielded as | (42) |
Since evaluating (42) still requires knowledge of all the harmonic amplitudes, it can be simplified by assuming that each frequency component has the same amplitude to obtain  | (43) |
where  is the power of the input signal. Furthermore, for each given
is the power of the input signal. Furthermore, for each given  , the upper bound
, the upper bound  for the required frequency range can be numerically searched, that is,
for the required frequency range can be numerically searched, that is, | (44) |
Figure 1 plots the upper bounds based on (44) versus  using
using  for
for  ,
,  , and
, and  , respectively. It can be seen that a smaller upper bound will be required when
, respectively. It can be seen that a smaller upper bound will be required when  is close to 1 as well as when
is close to 1 as well as when  increases for
increases for  .
. 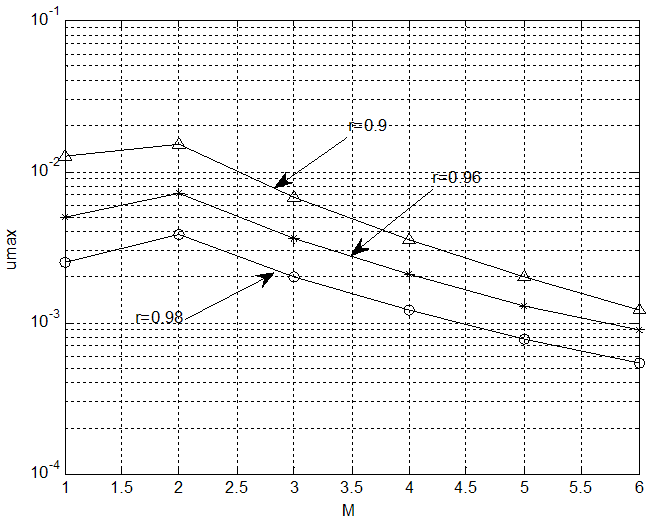 | Figure 1. Plots of the upper bounds (44) versus  using using  |
3. Computer Simulations
In the following simulations, the input signal containing up to third harmonics ( ) is assumed, that is,
) is assumed, that is, | (45) |
where  denotes the fundamental frequency while the sampling frequency is
denotes the fundamental frequency while the sampling frequency is  is a Gaussian noise. The fundamental frequency switches every 2000 samples. 200 samples (
is a Gaussian noise. The fundamental frequency switches every 2000 samples. 200 samples ( ) are used to estimate the fundamental frequency for initialization and for resetting the adaptive parameter
) are used to estimate the fundamental frequency for initialization and for resetting the adaptive parameter  when the possible local convergence of the algorithm is detected. The upper bound
when the possible local convergence of the algorithm is detected. The upper bound  is numerically searched using (43) and (44) for
is numerically searched using (43) and (44) for  .
.  is used for the simulations. The signal to noise ratio is set to 12 dB from sample 1 to sample 2000, 18 dB from sample 2001 to sample 4000, and 8.6 dB from sample 4001 to sample 6000, respectively.The behaviors of the developed algorithm are demonstrated in Figure 2. The algorithm initially tracks the fundamental frequency of 875 Hz. When the frequency switches from 875 Hz to 1225 Hz, the algorithm starts moving away from its original global minimum, since the MSE function is changed. Once the tracked frequency is moved beyond the maximum allowable frequency deviation
is used for the simulations. The signal to noise ratio is set to 12 dB from sample 1 to sample 2000, 18 dB from sample 2001 to sample 4000, and 8.6 dB from sample 4001 to sample 6000, respectively.The behaviors of the developed algorithm are demonstrated in Figure 2. The algorithm initially tracks the fundamental frequency of 875 Hz. When the frequency switches from 875 Hz to 1225 Hz, the algorithm starts moving away from its original global minimum, since the MSE function is changed. Once the tracked frequency is moved beyond the maximum allowable frequency deviation  , the algorithm relocates
, the algorithm relocates  and resets
and resets  ; and
; and  is reset again after the frequency is switched from 1225 Hz to 1000 Hz.
is reset again after the frequency is switched from 1225 Hz to 1000 Hz. 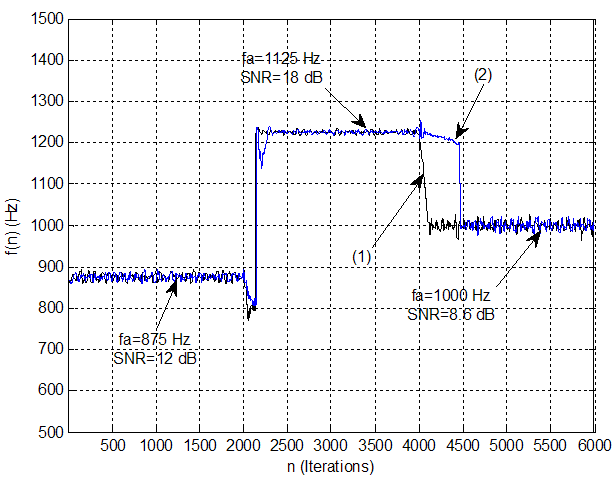 | Figure 2. Frequency tracking behaviors of the developed algorithms; (1): proposed algorithm; (2): standard algorithm [8] |
In order to compare the standard algorithm in [8], the same input signal generated from (45) is used. The upper bound is derived in [10] and is found as  for
for  . Similarly,
. Similarly,  is used for the simulations. As shown in Figure 2, the proposed algorithm converges faster than the standard algorithm [8] when the fundamental frequency switches.Figure 3 shows the proposed algorithm’s performance for frequency tracking under various noise conditions, where the frequency deviation from the fundamental frequency of 875 Hz is plotted against the SNR. Both algorithms use
is used for the simulations. As shown in Figure 2, the proposed algorithm converges faster than the standard algorithm [8] when the fundamental frequency switches.Figure 3 shows the proposed algorithm’s performance for frequency tracking under various noise conditions, where the frequency deviation from the fundamental frequency of 875 Hz is plotted against the SNR. Both algorithms use  ,
, , and
, and  . 2000 input samples are used for the simulations. For each SNR data point, the standard deviation is computed using the last 50 tracked fundamental frequency values. As shown in Figure 3, when SNR is larger than 10 dB, both proposed algorithm and standard algorithm [8] have a similar performance in terms of the standard deviation of frequency estimation; and the standard deviation for both algorithms is less than 0.5 Hz. However, the proposed algorithm has faster convergence rate as depicted in Figure 2 and less computation requirement for the simplified gradient update as shown in (11).
. 2000 input samples are used for the simulations. For each SNR data point, the standard deviation is computed using the last 50 tracked fundamental frequency values. As shown in Figure 3, when SNR is larger than 10 dB, both proposed algorithm and standard algorithm [8] have a similar performance in terms of the standard deviation of frequency estimation; and the standard deviation for both algorithms is less than 0.5 Hz. However, the proposed algorithm has faster convergence rate as depicted in Figure 2 and less computation requirement for the simplified gradient update as shown in (11).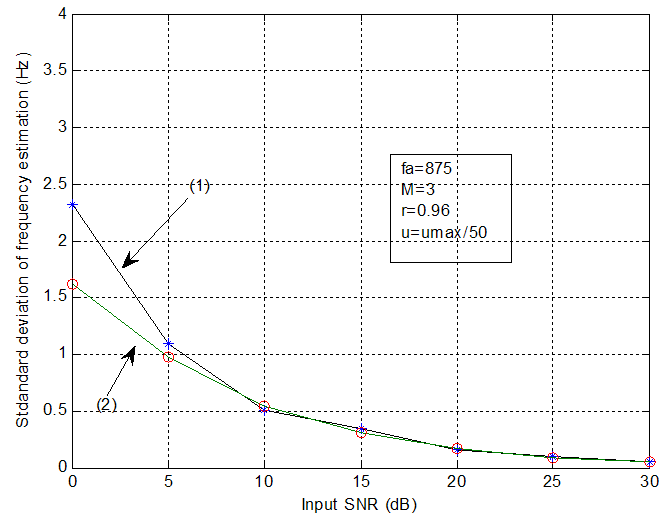 | Figure 3. Standard deviation of frequency estimation versus input SNR; (1): proposed algorithm; (2): standard algorithm [8] |
4. Conclusions
In this paper, a new simplified gradient adaptive harmonic IIR notch filter has been developed for frequency tracking in a harmonic frequency environment. The proposed algorithm utilizes the direct form II structure with a simplified gradient update and has capability to prevent its local minimum convergence due to signal fundamental frequency switches. In addition, a formula to determine the stability bound is derived for adopting the LMS algorithm.
References
| [1] | J. Chicharo and T. Ng, “Gradient-based adaptive IIR notch filtering for frequency estimation,” IEEE Trans. Acoust., Speech, and Signal Processing,, vol. 38, No. 5, pp. 769-777, May 1990. |
| [2] | J. Zhou and G. Li, “Plain gradient-based direct frequency estimation using second-order constrained adaptive IIR notch filter,” Electronics Letters, vol. 50, No. 5, pp. 351-352, 2004. |
| [3] | Y. Xiao, Y. Takeshita, K. Shida, “Steady-state analysis of a plain gradient algorithm for a second-order adaptive IIR notch filter with constrained poles and zeros,” IEEE Transactions on Circuits and Systems-II, vol. 48, no. 7, pp. 733-740, July 2001. |
| [4] | M. Oetraglia, J. Shynk, S. Mitra, “Stability bounds and steady-state coefficient variance for a second-order adaptive IIR notch filter,” IEEE Transactions on Signal Processing, vol.42, No. 7, July 1994. |
| [5] | M. Kusljevic, J. Tomic, L. Jovanovic, “Frequency estimation of three-phase power system using weighted-least-square algorithm and adaptive FIR filtering,” IEEE Trans. on Instrum. Meas., vol. 59, No 2, pp. 322-329, February 2010. |
| [6] | J. Piskorowski, “Digital Q-Varying Notch IIR filter with transient suppression,” IEEE Trans. on Instrum. Meas., vol. 59, No 4, pp. 866-872, No. 2, Feb. 2010. |
| [7] | L. Tan, J. Jiang, L. Wang, "Pole Radius Varying IIR Notch Filter with Transient Suppression," IEEE Transactions on Instrumentation and Measurement, Vol. 61, No. 6, pp. 1684-1691, June 2012. |
| [8] | L. Tan and J. Jiang, “Novel adaptive IIR notch filter for frequency estimation and tracking,” IEEE Signal Processing Magazine, November issue, pp.168-189, November 2009. |
| [9] | L. Tan, J. Jiang, "Real-Time Frequency Tracking Using Novel Adaptive Harmonic IIR Notch Filter," the Technology Interface Journal, Vol. 9, No. 2, Spring 2009. |
| [10] | L. Tan, J. Jiang, L. Wang, Adaptive Harmonic IIR Notch Filters for Frequency Estimation and Tracking. Chapter 13 in Adaptive Filtering, pp. 313-332, InTech, 2011. ISBN: 978-953-307-158-9. |
| [11] | L. Tan, J. Jiang, Digital Signal Processing: Fundamentals and Applications. Second Edition, Elsevier/Academic Press, 2013. |
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTML