-
Paper Information
- Previous Paper
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
American Journal of Signal Processing
p-ISSN: 2165-9354 e-ISSN: 2165-9362
2014; 4(1): 34-40
doi:10.5923/j.ajsp.20140401.05
Sub-Band-Power-Based Efficient Brain Computer Interface for Wheelchair Control
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLZouhir Bahri, Sara Abdulaal, Mariam Buallay
Electrical and Electronics Engineering Dept., University of Bahrain, Isa Town, Bahrain
Correspondence to: Zouhir Bahri, Electrical and Electronics Engineering Dept., University of Bahrain, Isa Town, Bahrain.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
An efficient Brain Computer Interface (BCI) is designed and implemented to allow disabled people to control the motion of wheelchairs. It uses a compact portable EEG sensor to capture 14 brain signals and wirelessly feed them to the PC. Four classes of motions are used: Forward, Backward, Left, and Right. The signals are obtained in a free-style manner without compelling users to perform pre-defined mental operations. This led to variations in the results that shed some light on the cognitive aspect of the problem. Principal Component Analysis (PCA) and Sub-Band Powers obtained from the Wavelet Transform are used to reduce the signal dimensionality from nearly 14000 to only 3. A Feed-Forward Neural Network with Back Propagation is used as a classifier. The average classification rate is 91 % on the overall and as high as 97.5 % for some users. The effect of mother wavelet type and user dependence are also investigated.
Keywords: Brain Computer Interface, EEG, Wavelet Transform, PCA, Neural Network
Cite this paper: Zouhir Bahri, Sara Abdulaal, Mariam Buallay, Sub-Band-Power-Based Efficient Brain Computer Interface for Wheelchair Control, American Journal of Signal Processing, Vol. 4 No. 1, 2014, pp. 34-40. doi: 10.5923/j.ajsp.20140401.05.
1. Introduction
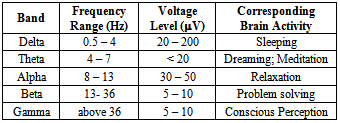
- Recent advances in technology have made it possible for severely handicapped people to act on their surrounding environment without the normal muscle and nerves pathways. Brain Computer Interface (BCI) systems make it possible for such disabled people to activate devices such as wheelchairs merely by their thoughts. BCI systems rely on the weak Electroencephalogram (EEG) signals that were first recorded by Berger in 1924[1]. These are generated at the surface of the scull as a result of the neural activity and are picked up by appropriately placed non-invasive electrodes. Since its first introduction by Vidal in 1973[2], BCI has received considerable attention over the last two decades [3-8]. Numerous research efforts have been deployed in an attempt to translate intentions and thoughts into real actions. Some of this work used the effect of facial gestures on EEG signals as a communication means with the outside world[9-11]. While such approaches may work with some users, they may not be acceptable for severely disabled people. In the context of our work, we are interested in BCI systems that rely on mere thoughts without any artifacts. BCI systems have been used in several applications such as cursor control[12], spelling and teletyping[13], answering questions[14], and composing music[15]. An important application of BCI is to assist severely disabled people in controlling the motion of wheelchairs as this offers them valuable autonomous mobility[16-22]. In such systems, the users are usually required to perform one of several mental tasks such as movement imagination, geometric figure visualization, arithmetic operations, etc. These mental tasks are mapped into the various wheelchair motions directions. Classification is carried out in the usual way of extracting features form the EEG signals and then applying one of several classifiers to the feature vector. While some researchers used a time-series prediction approach and derived the features from the power of the predicted EEG signals[23], most others resorted to the wavelet transform [24-28]. The coefficients of the details resulting from the wavelet transform are used as features. The justification for using the wavelet transform is that it leads to a sub-band decomposition of the signal in hand. This naturally matches the fact that EEG signals are divided into five frequency bands that take on different power levels depending on the mental state. This is shown in Table 1.
|
2. Data Collection
- The BCI implemented in this work uses the portable wireless headset from Emotiv[34]. It has a total of 16 sensors, 2 reference signals and 14 channels: AF3, F7, F3, FC5, T7, P7, O1, O2, P8, T8, FC6, F4, F8, and AF4. The sensors are applied to the scull surface using a saline solution and follow the 10-20 international standard. Nick-named “EPOC”, the headset uses a 128 Hz sampling rate with a 14 bit A/D resolution. It has a built-in fifth order sinc filter that cuts frequencies above 64 Hz. In addition, two notch filters suppress the 50/60 Hz interferences caused by the power lines. The EPOC has a 12-hr battery life and weighs around 7 Ounces. It comes in different packages including the CognitivTM Suite and AffectivTM Suite that provide ready packages for EEG analysis without direct access to the EEG signals. In our work, we used the more expensive Development Kit that allowed us to store and handle the EEG signals. Figs. 1-3 respectively show the headset, its sensor locations, and a sample of the picked-up signals. All channels are wirelessly transmitted to a USB module in the PC via a proprietary encoding/modulation on a 2.4GHz carrier.
 | Figure 1. Emotiv Headset[ 35] |
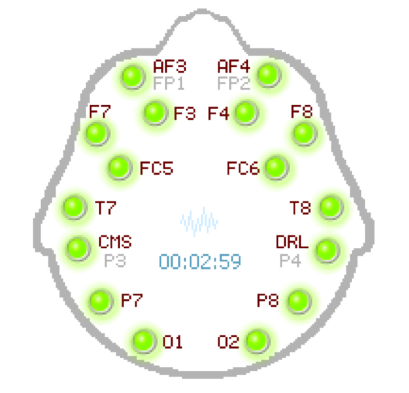 | Figure 2. Emotiv Headset sensor location[36] |
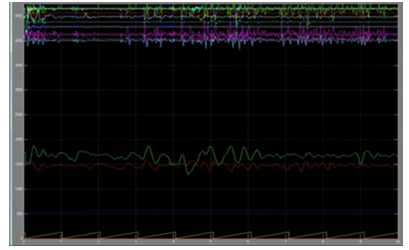 | Figure 3. Sample of measured EEG signals |
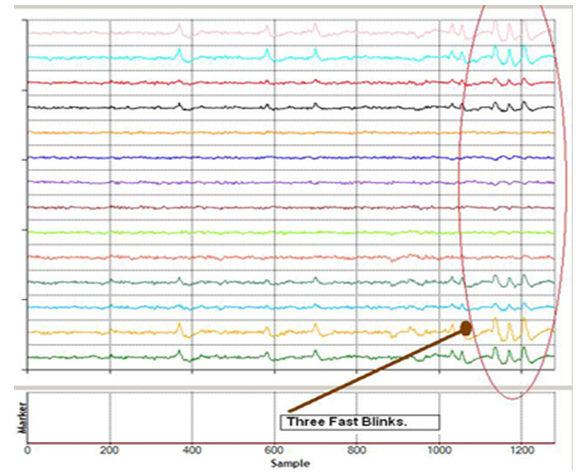 | Figure 4. EEG signal with three fast eye blinks[37] |
3. BCI System
- The proposed BCI system is shown in Fig. 5.
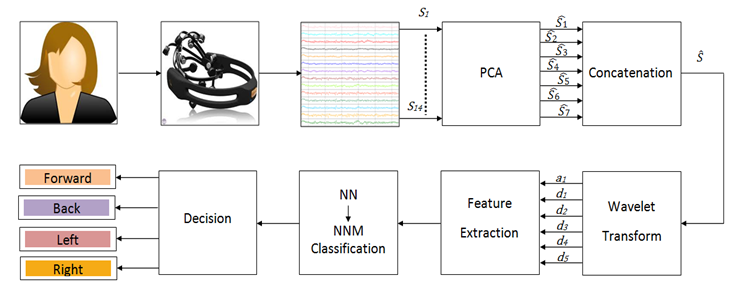 | Figure 5. Overall BCI System |
 | (1) |
 | (2) |
 is a diagonal matrix made up of the 14 eigenvalues (all non negative) arranged in descending order of magnitude.The data redundancy is removed by keeping only the “m” largest eigenvalues and neglecting the smaller ones along with their eigenvectors. Let
is a diagonal matrix made up of the 14 eigenvalues (all non negative) arranged in descending order of magnitude.The data redundancy is removed by keeping only the “m” largest eigenvalues and neglecting the smaller ones along with their eigenvectors. Let  denote the “m” by 14 reduced eigenvector matrix obtained by keeping the “m” eigenvectors (rows) corresponding to the largest “m” eignvalues. The reduced data matrix
denote the “m” by 14 reduced eigenvector matrix obtained by keeping the “m” eigenvectors (rows) corresponding to the largest “m” eignvalues. The reduced data matrix  of size “m” by 999 is obtained by
of size “m” by 999 is obtained by | (3) |
 averaged over all classes and measurements for various values of m.
averaged over all classes and measurements for various values of m.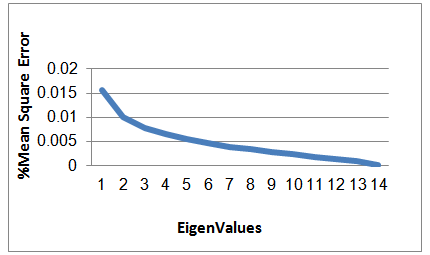 | Figure 6. Mean squared error between Xik and  versus the number of “m” largest eigenvalues taken versus the number of “m” largest eigenvalues taken |
4. Results
- In order to find an optimum feature vector, we performed an extensive testing using the average powers of the details and approximation of the wavelet transform. In this we were guided by the a-priori expectations that d2 should be our focus. Table 3 shows the overall classification results for different feature vector sizes using dB5 as mother wavelet. The three-point vector made up of the average powers of d2, d3, and d4 led to the best overall classification rate, hence shall be used in what follows. This corresponds to the average powers of the beta, alpha, and delta bands.
|
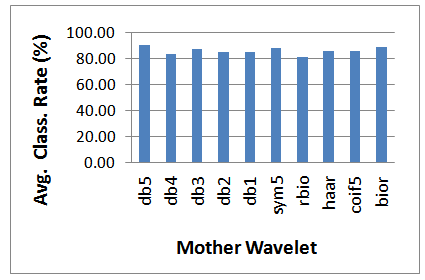 | Figure 7. Effect of the Wavelet type on the classification rate |
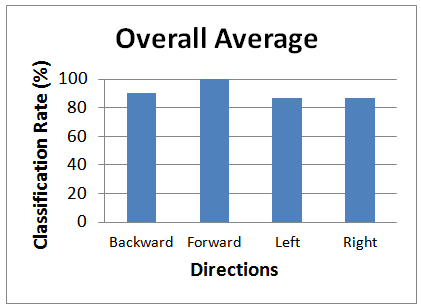 | Figure 8. Overall Classification Rate Using dB5 |
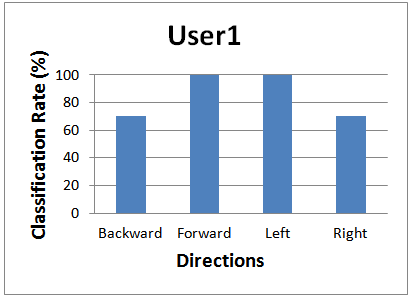 | Figure 9. Classification Rate Using dB5 Wavelet for User1 |
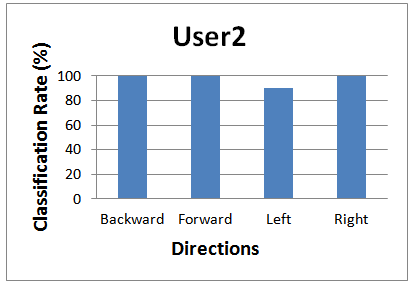 | Figure 10. Classification Rate Using dB5 Wavelet for User2 |
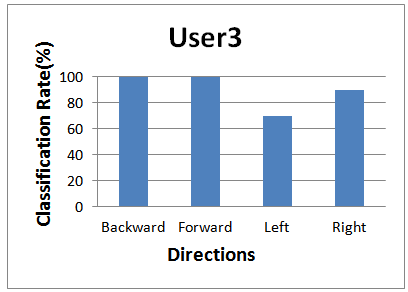 | Figure 11. Classification Rate Using dB5 Wavelet for User3 |
|
5. Conclusions
- An efficient and portable Brain Computer Interface (BCI) was designed, built, and tested to assist disabled people in controlling wheelchairs. The Emotiv[31] portable wireless headset was used to pickup 14 EEG signals off users’ scalps. Three volunteers (User1 a left-handed female of age 23, User2 a right-handed female of age 23, and User3 a right-handed male of age 50) helped to collect the needed EEG data. Four classes were used: Forward, Backward, Left, and Right. The EEG data was recorded in a free-style manner without compelling the users to perform various mental operations that are mapped to the motion directions. This has caused the signals to be less clustered hence harder to classify. On the other hand, it simplified the system use and resulted in anticipated variations that shed light on some cognitive aspects of the problem. It also allowed us to more genuinely test the user dependence of our BCI system. Principle Component Analysis (PCA) was used to reduce the signal redundancy and keep only seven of the fourteen EEG signals. The wavelet transform with a five-level decomposition was applied to the concatenated 7 signals. Several types of mother wavelet were tested. The dB5 wavelet led to best classification rates. The average powers of the details d1-d5 and approximation a5 (corresponding to the average powers of the EEG sub-frequency bands) were investigated as possible feature vector components. This is justified by the fact EEG sub-frequency bands exhibit different power levels under different mental states. The beta band is known to be most prominent during problem solving. Extensive testing showed that, as expected, d2 (corresponding to the Beta EEG band) is the most important detail level along with the alpha and delta bands. This may be explained by the fact that data recording was done in a meditation-type manner. Hence, the dimension of our problem was considerably reduced from nearly 14000 to only, leading to a much efficient training and testing of the BCI system. The overall average classification rate is 91% and ranges between 85 and 97.5%. The free-style data collection in our work resulted in variations in the results as well as a heavy user-dependency. Despite the different consistency levels in perceiving the four directions, all users systematically performed best with the “Forward” direction. With the human senses naturally geared forward, it is expected that people tend to perceive the forward direction easiest. In addition, it may be favored because it is generally related to an optimistic and progressive perception of life events. In another expected variation, User1 (left-handed) perfectly classified the “Left” class but made some errors with “Right”, while Users 2&3 (right-handed) showed an opposite behavior. The user dependency of our BCI system was demonstrated when it was cross tested with inputs from other non-training users. All directions were very poorly classified except for the “Forward” . Interestingly, this also seems to suggest that the forward direction is not only the most favorable amongst people, but also that they tend to perceive it in a very close manner. The results of the classifier are output as four bits through the USB port of a laptop PC (emulated as a virtual parallel port) using National Instrument’s data card. Hence, our BCI system provides direct switching to the wheelchair motors via relays. For a quick testing, we connected the four bits to four LEDs.We are currently working to extend the initial results of this work by testing other classifiers, enabling the system to operate in real-time, and using data from disabled people.
References
| [1] | H. Berger, “Uber das electrenkephalogramm des menchen”, Arch Psychiatr Nervenkr, pp 527-570, 1929. |
| [2] | J. J. Vidal, “Toward Direct Brain Computer Interface”, Annual Review of Biophysics and Bioengineering, Vol. 2, pp 157-180, June 1973. |
| [3] | C. Guer and G. Pfurtscheller, “EEG-Based Brain Computer Interface (BCI) Running in Real-Time under windows”, Electroencephalography and Clinical Neurophysiology, Proceeding of 9th European Congress of Clinical Neurophysiology), 106, Supplement 1, pp 91-100, 1998. |
| [4] | Z.A. Keirn and J.I. Aunon, “A new mode of communication between man and his surroundings”. IEEE Trans Biomed Eng., Vol 37, pp 1209–1214, 1990. |
| [5] | G.E. Birch and S.G. Mason, “Brain–computer interface research at the Neil Squire Foundation”, IEEE Trans Rehabil Eng. Vol. 8, pp 193–195, 2000. |
| [6] | G. Pfurtscheller, N. Neuper, C. Guger, W. Harkam, H. Ramoser, A. Schlögl, et al. «Current trends in Graz Brain-Computer Interface (BCI) research”, IEEE Trans Rehabil Eng, 8, pp 216–219, 2000. |
| [7] | G. Schalk, D.J. McFarland , T. Hinterberger, N. Birbaumer, J.R. Wolpaw, “BCI2000: development of a general purpose brain–computer interface (BCI) system”, Soc Neurosci Abstr, 27, p168, 2001. |
| [8] | N. Birbaumer, A. Kübler, N. Ghanayim, T. Hinterberger, J. Perelmouter, J. Kaiser, et al., “The thought translation device (TTD) for completely paralyzed patients”, IEEE Trans Rehabil Eng.,Vol. 8, pp 190–192, 2000. |
| [9] | J.R. LaCourse, F.C. Hladik, “An eye movement communication-control system for the disabled”, IEEE Trans Biomed Eng., 37, pp 1215–1220, 1990. |
| [10] | D.G. Evans, R. Drew, P. Blenkhorn et al., “Controlling mouse pointer position using an infrared head-operate joystick”, IEEE Transactions on Rehabilitation Engineering 8(1), pp 107-17, March 2000. |
| [11] | J.J. Tecce, J. Gips, C.P. Olivieri, L.J. Pok, M.R. Consiglio, “Eye movement control of computer functions.”, Int J Psychophysiol., 29, pp 319–325, 1998. |
| [12] | J. Wolpaw et al., “An EEG-Based Brain-Computer Interface for Cursor Control,” Electroencephalography and Clinical Neurophysiology, 78 (3), pp 252–259, 1991. |
| [13] | T. M. Vaughan, D.J. McFarland, G. Schalk, W.A. Sarnacki, L. Robinson, J.R. Wolpaw, “EEG-based brain–computer interface: development of a speller”, Soc Neurosci Abstr, 27, p 167, 2001. |
| [14] | L.A. Miner, D.J. McFarland, and J.R. Wolpaw, “Answering questions with an EEG-based brain–computer interface (BCI)”, Arch Phys Med Rehabil., 79, pp 1029 –1033, 1998. |
| [15] | E. R. Miranda, “Brain-Computer music interface for composition and performance”, Int. J Dis. Human Dev. 5(2), pp 61-67, 2006. |
| [16] | K. Choi and A. Cichocki , “Control a Wheelchair by Motor Imagery in Real Time,” IDEAL 2008, LNCS 5326 , pp 330-337, 2008. |
| [17] | F. Galan, M.Nuttan, E.Lew, P.W. Ferrez, G.Vanacker, J. Philip, J.del, R.Millan, “A brain actuated wheelchair: Asynchronous and non-invasive brain computer interfaces for continuous control of robot”,Clinical Neurophysiology, Vol 119, pp 2159-2169, 2008. |
| [18] | Tanaka, K.; Matsunaga, K.; Wang, H.O., Electroencephalogram-Based Control of an Electric Wheelchair, IEEE Transactions on Robotics, Vol. 21, Issue 4, pp.762-766, August 2005. |
| [19] | V. Khare, J. Santhosh, S. Anand, M. Bhatia, “Brain Computer Interface Based Real Time Control of Wheelchair Using Electroencephalogram”, International Journal of Soft Computing and Engineering (IJSCE), Vol 1, pp 41-45, November 2011. |
| [20] | J. Lin, W. Yang, “Wireless Brain-Computer Interface for Electrical Wheelchair with EEG and Eye-Blinking Signal”, International Journal of Innovative Computing, Information, and Control, Vol 8 (9), pp 6011-6024, Sep. 2012. |
| [21] | T. Carlson, J. Millan, “Brain-Controlled Wheelchairs: A Robotic Architecture”, IEEE Robotics and Automation Magazine, Vol 20(1), pp 65-73, March 2013. |
| [22] | A. Fattouh, O. Horn, G. Bourhis, “Emotional BCI Control of a Smar Wheelchair”, International Journal of Computer Science Issues (IJCSI), Vol 10, pp 32–36, May 2013. |
| [23] | D. Coyle, G. Prasad, T.M. McGinnity, “A time-series prediction approach for feature extraction in a brain-computer interface”, IEEE Trans Neural Syst Rehabil Eng., 13(4), pp 461-467, Dec 2005. |
| [24] | V.J. Samar, A. Bopardikar, R. Rao, K. Swartz, “Wavelet analysis of neuroelectric waveforms: a conceptual tutorial”, Brain Lang, 7, pp 60-66, 1999. |
| [25] | N. Hazarika, J.Z. Chen, A.C. Tsoi, A. Sergejew, “Classification of EEG signals using the wavelet transform”, Signal Process., 59 (1), pp 61—72, 1997. |
| [26] | B.G. Xu and A. G. Song, “Pattern recognition of motor imagery EEG using wavelet transform,”Journal of Biomedical Science & Engineering, Vol 1, pp 64-67, 2008. |
| [27] | A. Subasi, “EEG signal classification using wavelet feature extraction and a mixture of expert model, Expert Systems with Applications”, Vol. 32, Expert Systems with Applications, pp 1084-1093, May 2007. |
| [28] | N. Hazarika, J. Z. Chen, A. C. Tsoi, A. Sergejew, “Classification of EEG signals using the wavelet transform”, Signal Processing, Vol. 59, pp 61–72, May 1997. |
| [29] | S.J. Roberts, W.D. Penny, “Real-time brain–computer interfacing: a preliminary study using Bayesian learning”, Med Biol Eng Comput., Vol 38, pp 56–61, 2000. |
| [30] | B. Obermaier, C. Guger, C. Neuper, G. Pfurtscheller, “Hidden Markov models used for online classification of single trial EEG”, Vol 22, pp 1299–1309, 2001. |
| [31] | Q. Xu, H. Zhou, Y. Wang, J. Huang, “Fuzzy Support Vector machine for Classification of EEG Signals Using Wavelet-based features”, Medical Engineering and Physics, Vol. 31, pp 858-865, 2009. |
| [32] | N.J. Huan, and R. Palaniappan,” Neural network classification of autoregressive features from electroencephalogram signals for brain–computer interface design”, J. Neural Eng. Vol 1, pp 142–150, 2004. |
| [33] | T. W. Bahghua, Y. Hong Sun, “EEG Classification Based on Artificial Neural Network in Brain Computer Interface”, Life System Modeling and Intelligent Computing Communications in Computer and Information Science, Volume 97, pp 154-162, 2010. |
| [34] | http://www.emotiv.com/eeg/features.php |
| [35] | http://stopczynski.com |
| [36] | http://hci.javiergs.com/emotiv.html |
| [37] | http://www.extremetech.com/computing/83524-the-emotiv-epoc-meeting-the-future-head-on/13. |