Chandra Sen
Professor (Rtd.), Department of Agricultural Economics, Institute of Agricultural Sciences, Banaras Hindu University, Varanasi, India
Correspondence to: Chandra Sen , Professor (Rtd.), Department of Agricultural Economics, Institute of Agricultural Sciences, Banaras Hindu University, Varanasi, India.
| Email: |  |
Copyright © 2020 The Author(s). Published by Scientific & Academic Publishing.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

Abstract
Multi Goal Programming (MGP) techniques are used to achieve multiple goals simultaneously. The goals may be conflicting and are achievable only at the cost of other goals. Several goal programming techniques have been developed during past three decades. These are the minimization of sum of deviations between goals and the achievements, weighted goal programming and Preemptive goal programming. Observing the problem of multi-dimensional aggregation, an improved MGP technique has been proposed by Sen, which was found efficient in generating a compromising solution for achieving many goals at a time. In this study a modification in the Sen's improved MGP is proposed to solve MGP problems. The modified MGP technique has been tested with the suitable examples.
Keywords:
Single Goal Programming, Multi Goal Programming, Improved Multi Goal Programming
Cite this paper: Chandra Sen , Sen's Improved Multi Goal Programming Technique- An Extension, American Journal of Operational Research, Vol. 10 No. 3, 2020, pp. 49-52. doi: 10.5923/j.ajor.20201003.02.
1. Introduction
Charnes and Cooper [1] proposed the multi goal programming in the year 1961. MGP has been extensively applied [2], [3], [4] for achieving multiple conflicting goals. Lee [5] has made technical improvements in multi goal programming technique. The application of multi goal programming has been emphasized [6] for improving the decision making process. Hokey and James [7] suggested new ideas for improving research in multi goal programming. Schniederjan [8] pointed out the decline in the theoretical development of multi goal programming. Several variants of MGP have also been developed [9], [10], [11] during the recent past. The purpose of all these MGP techniques to achieve the multiple conflicting goals. It may not be possible to achieve all the goals perfectly by any MGP technique. However, a MGP technique is said to be superior whose achievements of goals are closest to their aspiration levels. The existing MGP techniques were unable to neutralize the effect of multidimensional aggregation in formulation multi goal optimization function. The high deviations in the coefficients of decision variables amongst different goals was another problem in obtaining appropriate solutions of MGP problems. Recently, an improved MGP technique has been introduced by Sen [12] and found efficient in generating satisfactory solutions inspire of above mentioned problems. The Sen's improved MGP technique has been modified in this study. The modified improved MGP technique has been tested with three examples and found efficient in solving MGP problems. The results of modified improved MGP technique has been compared with the existing and Sen's improved multi goal programming techniques.
2. Methodology
2.1. Existing MGP Model
The existing multi goal programming model can be expressed as: | (1) |
Subject to:Goal Constraints | (2) |
System constraints | (3) |
There are 'm' Goals, 'p' System constraints and 'n' decision variablesZ= Objective function/ Summation of all deviationsaij= the coefficient associated with jth variable in ith Goal/constraintXj= the jth decision variable = the right hand side value of ith goalbi= the right hand side value of ith constraint
= the right hand side value of ith goalbi= the right hand side value of ith constraint = negative deviational variation from ith goal (under achievement)
= negative deviational variation from ith goal (under achievement) = positive deviational variation from ith goal (over achievement)
= positive deviational variation from ith goal (over achievement)
2.2. Improved MGP Technique
The improved technique is formulated as described below: | (4) |
Subject to:Goal Constraints | (5) |
System constraints | (6) |
There are 'm' Goals, 'p' System constraints and 'n' decision variablesZ= Objective function/ Summation of all deviationsaij= the coefficient associated with jth variable in ith Goal/constraintXj= the jth decision variable  = the right hand side value of ith goalbi= the right hand side value of ith constraint
= the right hand side value of ith goalbi= the right hand side value of ith constraint  = negative deviational variation from ith goal (under achievement)
= negative deviational variation from ith goal (under achievement)  = positive deviational variation from ith goal (over achievement)
= positive deviational variation from ith goal (over achievement)
2.3. Modified Improved MGP Technique
The improved technique is formulated as described below: | (7) |
Subject to:Goal Constraints | (8) |
System constraints | (9) |
There are 'm' Goals, 'p' System constraints and 'n' decision variablesZ= Objective function/ Summation of all deviationsaij= the coefficient associated with jth variable in ith Goal/constraintXj= the jth decision variable = value of ith goalbi= the right hand side value of ith constraint
= value of ith goalbi= the right hand side value of ith constraint = negative deviational variation from ith goal (under achievement)
= negative deviational variation from ith goal (under achievement) = positive deviational variation from ith goal (over achievement)
= positive deviational variation from ith goal (over achievement)
3. Mathematical Examples
Two examples used in the study by Sen [12] and one new example have been solved by the single, existing, improved and modified improved MGP techniques for the comparative analysis.Example 1Goal-I: 16500X1 + 18100X2 + 15800X3 +17400X4 + 14800X5 = 73000Goal-II: 41X1 + 35X2 + 32X3 +39X4 + 31X5 = 165Goal-III: 430X1 + 470X2 + 380X3 +410X4 +440X5 = 1500Goal-IV: 2300X1 + 2400X2 + 2100X3 +1900X4 +1800X5 =7000Subject to:X1 + X2 + X3 +X4 + X5 = 42X3 ≥ 1X1, X2, X3, X4, X5 ≥ 0Example 2Goal-I: 6X1 + 5X2 + 3X3 + 4X4 = 55Goal-II: 700X1 + 800X2 + 900X3 + 500X4 = 9000Goal-III: 50X1 + 55X2 + 40X3 + 60X4 = 600Subject to:X1 + X2 + X3 +X4 = 11X1 ≥ 12X3 ≥ 1X1, X2, X3, X4 ≥ 0Example 3Goal-I: 11X1 + 12X2 + 13X3 +15X4 + 16X5 +14X6 + 17X7 + 18X8 = 50Goal-II: 29X1 + 22X2 + 24X3 +26X4 + 27X5 +23X6 + 28X7 + 21X8 = 80Goal-III: 30X1 + 28X2 + 31X3 +33X4 + 36X5 +34X6 + 37X7 + 35X8 = 100Goal-IV: 90X1 + 91X2 + 99X3 +96X4 + 97X5 +94X6 + 98X7 + 95X8 = 250Goal-V: 42X1 + 41X2 + 44X3 +48X4 + 45X5 +40X6 + 46X7 + 43X8 = 120Goal-VI: 69X1 + 73X2 + 72X3 +74X4 + 82X5 +71X6 + 75X7 + 70X8 = 200Goal-VII: 2X1 + 6X2 + 5X3 +4X4 + 7X5 +9X6 + 8X7 + 3X8 = 25Subject to:X1 + X2 +X3 + X4 + X5 + X6 +X7 + X8 = 2.52X1 ≥ 1X7 ≥ 0.2X1, X2, X3, X4, X5, X6, X7, X8 ≥ 0
4. Solution
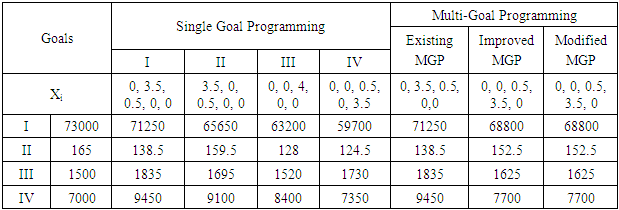
All the three examples have been solved using single goal programming, existing, improved and modified improved MGP techniques. The results of example 1 have been presented in table 1. The achievements of the goals in the individual optimizations were all the different. This was due to conflicts amongst the goals. The optimization of first goal achieved its value 71250 which is closer to its goal of 73000. The similar results in the optimization of remaining three goals have been observed. The results of multi goal programming have also been given in the table. The existing MGP has no improvement in the solution. It has reproduced the solution achievement of the second goal. However, the modified improved MGP has generated same results as of improved MGP. The achievement of the first goal was 68800 which is as good as the achievement of the first goal optimization The achievements of remaining three goals were also superior over single MGP solutions. Table 1. Goal Achievements in Single and Multi-Goal Programming
 |
| |
|
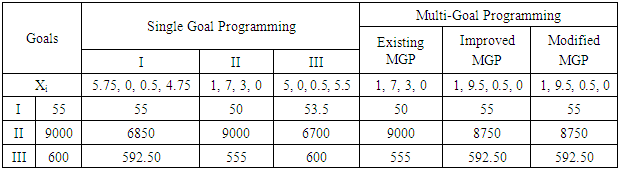
The solution of example 2 has been arranged in table 2. In all the three single goal programming, only one goal has been achieved fully ignoring remaining two goals. The achievements first. second and third goals were 55, 9000 and 600 respectively with the lesser achievements of remaining goals. The existing MGP has achieved the second goal only and ignored the other two goals. However, all the three goals have been achieved simultaneously by both improved and its modified improved MGP techniques.Table 2. Goal Achievements in Single and Multi-Goal Programming
 |
| |
|
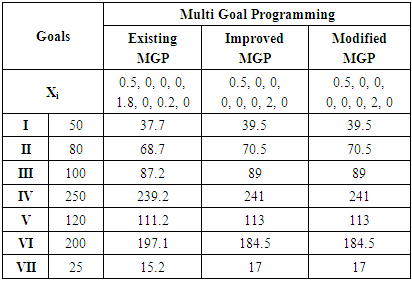
Tables 3 and 4 presents the results of the third example. The single goal programming has achieved the only one goal ignoring the remaining six goals as mentioned in table 3. The solution of multi goal programming using existing. improved and modified improved techniques are given in table 4. The existing MGP has made no improvement in achieving all the goals. It has reproduce the solution of single goal achievement of sixth goal only. However, the improved and the modified improved MGP have achieved all the seven goals simultaneously.Table 3. Goal Achievements in Single Goal Programming
 |
| |
|
Table 4. Goal Achievements in Multi-Goal Programming
 |
| |
|
5. Conclusions
The improved MGP technique has been modified and applied to solve three examples of multiple conflicting goals. The examples have also been solved with single, existing, and improved MGP techniques also for the comparative analysis. The modified improved MGP technique has achieved all the goals simultaneously in all the three examples. The solutions of modified improved MGP technique were same as of improved MGP technique. It can be concluded that the modified improved technique is also efficient in solving the MGP problems.
Compliance with Ethical Standards
Conflict of interest: The author declares that there is no conflict of interest.
References
| [1] | Charnes, A., & Cooper, W. W. (1961). Management model and industrial application of linear programming. New York: Wiley. |
| [2] | Ignizio, J. P. (1985). Introduction to linear goal programming. Beverly: Hills, CA: Sage. |
| [3] | Tamiz, M., Jones, D., & Romero, C. (1998). Goal programming for decision making: an overview of the current state-of-the-art. European Journal of Operational Research, 111, 567-581. |
| [4] | Romero, C. (2001). Extended lexicographic goal programming: a unifying approach. Omega, 29, 63-71. |
| [5] | Lee SM. (1972) Goal programming for Decision Analysis, Auerbach, Philadelphia. |
| [6] | Ahmed K. Rifai (1996) A note on structure of goal-programming model: assessment and evaluation. International Journal of Operations & Production Management, Vol. 16 (1), 40-49. |
| [7] | Hokey Min and James Storbeck (1991) On the Origin and Persistence of Misconceptions in Goal Programming. The Journal of the Operational Research Society, Vol. 42, (4), 301-312. |
| [8] | Schniederjans, M. J. (1995), Goal Programming Methodology and Applications, Kluwer Academic Publishers, Boston. |
| [9] | Kanan K. Patro, M. M. Acharya & S. Acharya (2018) Multi-choice goal programming approach to solve multi-objective probabilistic programming problem, Journal of Information and Optimization Sciences, 39:3, 607-629. |
| [10] | Qahtani, H. Al., El–Hefnawy, A., El–Ashram, M. M., and Fayomi, A. (2019). A Goal Programming Approach to Multichoice Multiobjective Stochastic Transportation Problems with Extreme Value Distribution. Advances in Operations Research. Vol. 2019, 1-6. |
| [11] | Ajayi-Daniels, E. E. (2019). Resource Optimization in a Fashion Firm: A Goal Programming Approach. International Journal of Management and Fuzzy Systems, 5 (1), 14-20. |
| [12] | Sen, Chandra (2020). Improved Multi Goal Programming Technique. American Journal of Operational Research, Vol. 10 (3), 45-48. |

 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTML