-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
American Journal of Operational Research
p-ISSN: 2324-6537 e-ISSN: 2324-6545
2020; 10(3): 45-48
doi:10.5923/j.ajor.20201003.01
Received: Sep. 23, 2020; Accepted: Oct. 6, 2020; Published: Oct. 15, 2020

Improved Multi Goal Programming Technique
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLChandra Sen
Professor (Rtd.), Department of Agricultural Economics, Institute of Agricultural Sciences, Banaras Hindu University, Varanasi, India
Correspondence to: Chandra Sen , Professor (Rtd.), Department of Agricultural Economics, Institute of Agricultural Sciences, Banaras Hindu University, Varanasi, India.
| Email: |  |
Copyright © 2020 The Author(s). Published by Scientific & Academic Publishing.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

Multi Goal Programming (MGP) is an extension of Goal Programming used for achieving multiple conflicting goals simultaneously. Several MGP techniques have been developed and used for solving multi goal optimization problems during last three decades. These MGP techniques are based on minimization of sum of deviations between goals and their achievements. For the incommensurate goals, the summing these deviations seems illogical. This problem has been resolved in the proposed an improved MGP technique for solving MGP problems. The results of solving two examples by these technique have shown the superiority of the Improved MGP technique.
Keywords: Goal Programming, Single Goal Programming, Multi Goal Programming
Cite this paper: Chandra Sen , Improved Multi Goal Programming Technique, American Journal of Operational Research, Vol. 10 No. 3, 2020, pp. 45-48. doi: 10.5923/j.ajor.20201003.01.
Article Outline
1. Introduction
- Multi Goal Programming is a technique often used to find a compromised solution in achieving multiple conflicting goals. MGP was introduced by Charnes and Cooper [1] and further extended by Ignizio [2], Tamiz, Jones, and Romero [5], and Romero [6]. Weighted Sum Goal Programming (WSMGP) and Preemptive Goal Programming (PGP) techniques have been popularly used by Ajayi-Daniels [14], Kanan, Acharya and Acharya [10] and Qahtani, El–Hefnawy, El–Ashram, and Fayomi [13] for solving multi goal programming problems. Dave, Abha [8] and Cinthia [9] suggested the application of multi goal programming for managing agriculture efficiently. A sustainable development plan for India was prepared using MGP by Gupta, Fügenschuh and Ali [11]. Mohammadiana, Babaeia, Jarrahi, and Anjomrouzb [12] used MGP for scheduling the nurse shifts in a hospital for improving the efficiency of the nursing services to the patients. Goal programming technique was applied to determine the optimal number of students to be enrolled in different disciplines by Rashid, Halim and Hassan [15]. Ojo, Farayibi and Akinnuli [16] used multi goal programming for procurement of various equipments in a manufacturing industry. Priyadharshini and Anju [17] applied the goal programming for solving the transport problem. A Several variants of multi goal programming have also been proposed in the past three decades. However, proper attention has not been given to the conceptual framework of the techniques. Few methodological issues of MGP and weight sum multi goal programming (WSMGP} have been discussed in the limited studies by Min, and Storbeck [3], Rifai [4], Orumie, and Ebong [7]. The present study points out a few weaknesses in the basic structure of MGP/WSMGP techniques and proposes an improved technique for generating appropriate solutions.
2. Methodologies to Solve MGP Problems
2.1. Existing MGP Model
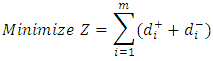
- The existing multi goal programming model can be expressed as:
 Subject to:Goal Constraints
Subject to:Goal Constraints  System constraints
System constraints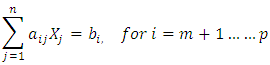 There are 'm' Goals, 'p' System constraints and 'n' decision variablesZ= Objective function/ Summation of all deviationsaij= the coefficient associated with jth variable in ith Goal/constraintXj= the jth decision variable
There are 'm' Goals, 'p' System constraints and 'n' decision variablesZ= Objective function/ Summation of all deviationsaij= the coefficient associated with jth variable in ith Goal/constraintXj= the jth decision variable = the right hand side value of ith goalbi= the right hand side value of ith constraint
= the right hand side value of ith goalbi= the right hand side value of ith constraint = negative deviational variation from ith goal (under achievement)
= negative deviational variation from ith goal (under achievement) = positive deviational variation from ith goal (over achievement)
= positive deviational variation from ith goal (over achievement)2.2. Misconceptions in the Existing MGP Model
- a. The MGP models help the decision-maker to obtain an appropriate solution for achieving multiple goals. Often multiple goals are conflicting and are achievable only at the expense of other goal/s. The goals may be incommensurable. The summation and subtraction of deviations of multi dimensional values seems not logical.b. In the presence of high deviations in the coefficients of decision variables of different goals, the MGP solution may be biased towards the goal/s with higher values of coefficients.
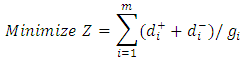
3. Improved MGP Model
- The abovementioned problems can be resolved by scalarizing the objective function as described below. This makes the deviations free of dimensions.
 Subject to:Goal Constraints
Subject to:Goal Constraints System constraints
System constraints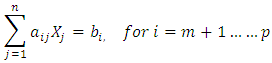 The above techniques have been used to solve the following examples.
The above techniques have been used to solve the following examples. 4. Examples
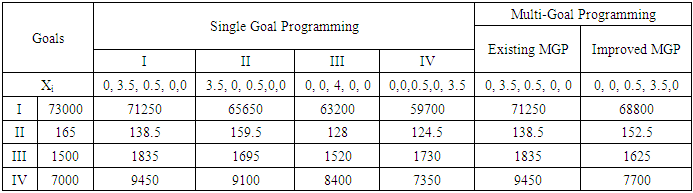
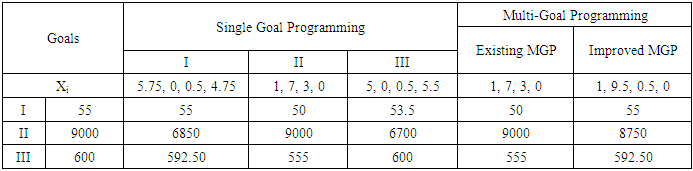
- Two examples have been solved using existing and Improved MGP.Example 1Goal-I: 16500X1 + 18100X2 + 15800X3 +17400X4 + 14800X5 = 73000Goal-II: 41X1 + 35X2 + 32X3 +39X4 + 31X5 = 165Goal-III: 430X1 + 470X2 + 380X3 +410X4 +440X5 = 1500Goal-IV: 2300X1 + 2400X2 + 2100X3 +1900X4 +1800X5 =7000Subject to:X1 + X2 + X3 +X4 + X5 = 42X3 ≥ 1X1, X2, X3, X4, X5 ≥ 0Example 2Goal-I: 6X1 + 5X2 + 3X3 + 4X4 = 55Goal-II: 700X1 + 800X2 + 900X3 + 500X4 = 9000Goal-III: 50X1 + 55X2 + 40X3 + 60X4 = 600Subject to:X1 + X2 + X3 +X4 = 11X1 ≥ 12X3 ≥ 1X1, X2, X3, X4 ≥ 0
5. Solution
- Example 1 has been solved using single as well as MGP techniques. The results are presented in Table 1. All four solutions of single goal optimization are quite different. Each solution achieves one goal only and ignores the remaining three goals. The first solution achieves the first goal up to 71250 which seems superior to the remaining three goal achievements. The value of the second goal achieved was 159.50 which was close to its goal of 165. Similar results have been obtained in the achievements of third and fourth goals. The results of existing and improved MGP techniques are presented in the last two columns of Table 1.
|
|
6. Conclusions
- The present study tried to identify a few methodological issues in the existing MGP technique and proposed an improved MGP technique. Existing and improved MGP techniques have been tested with two suitable examples. The existing MGP technique failed to achieve all the goals simultaneously. However, the improved MGP technique have provided superior solution in achieving the desired goals simultaneusly.
Compliance with Ethical Standards
- Conflict of interest: The author declares that there is no conflict of interest.