-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
American Journal of Mathematics and Statistics
p-ISSN: 2162-948X e-ISSN: 2162-8475
2017; 7(2): 78-88
doi:10.5923/j.ajms.20170702.04

Bayesian Spatial Ordinal Models for Regional Household Poverty-Severity
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLRichard Puurbalanta1, Atinuke O. Adebanji2
1University for Development Studies, Faculty of Mathematical Sciences, Department of Statistics, Navrongo Campus, Ghana
2Kwame Nkrumah University of Science and Technology, Faculty of Physical Sciences, College of Science, Department of Mathematics, Kumasi, Ghana
Correspondence to: Richard Puurbalanta, University for Development Studies, Faculty of Mathematical Sciences, Department of Statistics, Navrongo Campus, Ghana.
| Email: |  |
Copyright © 2017 Scientific & Academic Publishing. All Rights Reserved.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

The use of discrete spatial-statistical methods for poverty analyses is important, especially in light of the fact that living standards surveys are generally dominated by categorical observations made at several locations. The proximity of these observations imposes geographical structure on the data. This study presents ordinal geo-statistical models for household poverty analyses that recognize the ordinal nature of poverty severity. For all models, Bayesian inference via Markov Chain Monte Carlo (MCMC) was used. Precision of the models, understood in terms of ease of implementation and accuracy of estimation, is compared. The objective was to quantify spatial associations, given some household features, and produce a map of poverty-severity for Ghana. The Clipped Gaussian Spatial Ordinal Probit (CG-SOP) Model was identified as best for describing spatial poverty. Positive correlation with respect to the distribution of extreme poverty was observed. We see evidence of this in the map of predictions. Significant variables include household size, education, and residency of household head. This approach to poverty analysis is relevant for policy design and the implementation of cost-effective programmes to reduce (category and site)-specific poverty, and monitoring changes in both category and geographical trends thereof. Analysis was based on the Ghana living standards survey (GLSS) 2012 data.
Keywords: Household poverty-Severity, Latent Variables, Ordinal models,Bayesian inference, Markov Chain Monte Carlo, Prediction maps
Cite this paper: Richard Puurbalanta, Atinuke O. Adebanji, Bayesian Spatial Ordinal Models for Regional Household Poverty-Severity, American Journal of Mathematics and Statistics, Vol. 7 No. 2, 2017, pp. 78-88. doi: 10.5923/j.ajms.20170702.04.
Article Outline
1. Introduction
- If a variable is random, being independent and identically distributed (i.i.d.), it can be analyzed using standard statistical techniques such as the generalized linear models (GLMs). When the variable, however, is distributed in a manner that subjects it to systematic spatial variation, where observations at proximal locations are more similar than observations further apart, the independence assumptions of standard statistical methods fail. Parameters cannot easily be estimated via simple or straightforward statistical techniques such as the GLMs. Methods that allow for spatial dependency in the data are instead required for parameter estimation. When the variable is also categorical, and ordered, modelling is further complicated, requiring complex inferential techniques to effectively handle the multiple categories, and also account for the ordering.Premising the discourse on poverty this way is important, especially in light of the fact that welfare data are often dominated by categorical observations collected (via living standards surveys) at several locations across space, and proximity of these observations imposes geographical structure on the data. This means that global parameters (obtained via independence assumptions of standard statistical methods) cannot adequately describe site-specific conditions of the variable. Previous works to investigate poverty is abundant [1-5], but have largely ignored spatial dependence of observations and used methods that rely on independence assumptions, albeit with varying degrees of sophistication. This is problematic because when a regression model incorrectly assumes homoscedasticity in the errors of a spatial variable, outcome of the analysis can be biased [6]. The existing literatures [7-9] that have used spatial tools to study poverty have also largely ignored the multi-categorical and ordinal nature of the variable. Binary models for poverty analysis mask the effect of important intermediate information during the binary transformation of the variable [10], but also excludes the severest form of the variable; extreme poverty. This has the potential for incomplete and inaccurate description of poverty. The method for poverty analysis must be careful to explain why some population groups are non-poor, poor, or extremely poor. So, what we do differently is to first discretize poverty into a multi-category ordered random variable using the severity levels as thresholds, and employ multivariate ordered analysis to describe the overall condition of a household as either being non-poor, poor, or extremely poor. Ordinal models solve the problem of loss of information during discretization by appealing to the concept of latent variables [11, 12], where a Gaussian random variable is assumed to be latent, and assigning values to the ordered categories according to a regression function. Second, we assume that poverty, like all spatial phenomena, is not only a function of covariates, but also of unobservable large-scale interaction of geographical and agro-climatic forces. Thus, we model poverty-severity risk as a spatially-varying ordinal phenomenon. Three models were proposed: The simple Ordinal Probit (OP) model [11], ordinal Spatial Generalized Linear Mixed Model (SGLMM) [12-14], and Clipped Gaussian Spatial Ordinal Probit (CG-SOP) model [15-17]. All the models were implemented in R version 3.1.3 [18], and ArcGIS [19].To solve the inferential problems associated with spatial ordered models, we follow [20] to use the Bayesian decision paradigm, implemented via Markov Chain Monte Carlo (MCMC) sampling techniques. Overall, our method can be considered a (category and site)-specific report that identifies all segments of the poor for easy targeting, thus avoiding the blanket approach that prefers the one-fits-it-all solution to the problem of poverty.
2. Measurement of Poverty
- Poverty has many dimensions, but is generally measured in non-monetary or monetary terms [18]. We adopt the monetary approach to capture and report information in a form which facilitates comparison of our findings with similar international research. Estimation of monetary poverty requires a choice between disposable income and total consumption expenditure as the indicator of wealth, the latter being the preferred choice in most developing countries [21], and in this study. Moreover, to measure monetary poverty, we need to set minimum standards of the poverty indicator to separate the various categories of the poor. These are called poverty lines [21]. The three categories of poverty lines adopted by [21] are based on family daily expenditure per adult equivalent. The thresholds are set at GHC 3.60 per day- non-poor, between GHC3.60 and GHC2.17–poor, and less than GHC2.17- extremely poor.
3. Data Sources and Covariates
- The study used secondary data from the Ghana Living Standard Survey (GLSS). Included in the dataset of 16772 sampled households are details of households (household size, age, sex, and educational level of household head), socio-economic conditions of household (availability of social amenities), and neighbourhood information (ecological zone, rural/urban residence, and other environmental factors). The dataset of the GLSS collected in 2012 were not geo-coded. To perform spatial analysis, we geo-located each sampled household randomly (assuming a uniform distribution) at the district level in order to be consistent with existing spatial units.
4. Ordinal Random Variables and Computations
4.1. The Ordinal Probit (OP) Model
- The traditional OP GLM [12] derives from the multinomial distribution, albeit with ranked categories. The density function for the multinomial distribution is:
 | (1) |
 is the vector of
is the vector of  responses, and
responses, and  constitutes the probability of observation
constitutes the probability of observation  being in category
being in category  Here, the order of the
Here, the order of the  outcomes is not important. To derive the proportional odds cumulative OP GLM from (1), let the responses
outcomes is not important. To derive the proportional odds cumulative OP GLM from (1), let the responses  be arranged in order of magnitude, and
be arranged in order of magnitude, and  be the corresponding thresholds associated with the ordering. Further let
be the corresponding thresholds associated with the ordering. Further let  be a Gaussian random variable assumed to be latent, and assigning values to
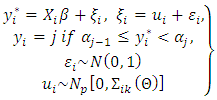
be a Gaussian random variable assumed to be latent, and assigning values to  according to the regression function:
according to the regression function: | (2) |
 is
is  design matrix, and
design matrix, and  is a
is a  unknown vector of regression coefficients, and
unknown vector of regression coefficients, and  is the
is the  vector of independently and identically distributed
vector of independently and identically distributed  measurement errors:
measurement errors:  Though the values of
Though the values of  cannot be directly observed, the rule that assigns
cannot be directly observed, the rule that assigns  to
to  is that if
is that if  exceeds a given threshold, then, an observation falls in the
exceeds a given threshold, then, an observation falls in the  category. This culminates in cumulative multiple binary outcomes:
category. This culminates in cumulative multiple binary outcomes:  | (3) |
 is the vector of
is the vector of  response,
response,  and
and  Clearly,
Clearly,  in our application, refers to the Gaussian expenditure line, and is asymptotic of the ordinal variable
in our application, refers to the Gaussian expenditure line, and is asymptotic of the ordinal variable  when
when  Our objective is to predict the probability of a household falling in the
Our objective is to predict the probability of a household falling in the  category given the observed covariates
category given the observed covariates  This probability is determined by the values of the latent variable
This probability is determined by the values of the latent variable  and is given by
and is given by  | (4) |
 is Gaussian, and
is Gaussian, and  the outcome is a probit model, implying that the probability of falling in the
the outcome is a probit model, implying that the probability of falling in the  category is:
category is: | (5) |
 is the cumulative distribution function
is the cumulative distribution function  for the normal
for the normal  Thus, the likelihood function for the parameters is
Thus, the likelihood function for the parameters is  | (6) |
4.1.1. Bayesian Estimation via MCMC
- Following the Bayesian criteria, we set priors for the parameters, and build the posterior as:
 | (7) |
 is the data likelihood,
is the data likelihood,  is the prior density of model parameters, and
is the prior density of model parameters, and  is the integrated likelihood, with
is the integrated likelihood, with  being the parameter space. Posterior estimation is done by setting up the Gibbs sampler [14], which requires us to derive full conditionals for all parameters. We impose, following [12], non-informative priors on the regression coefficients. Then
being the parameter space. Posterior estimation is done by setting up the Gibbs sampler [14], which requires us to derive full conditionals for all parameters. We impose, following [12], non-informative priors on the regression coefficients. Then  | (8) |
 | (9) |
 | (10) |
 is the vector of observed ordinal outcomes, whiles
is the vector of observed ordinal outcomes, whiles  is latent,
is latent,  is an indicator variable, leading to:
is an indicator variable, leading to:  | (11) |
4.2. Spatial Measurement Framework
- If, for example, ordinal observations are made at sites
 under geo-statistical assumptions, then the data is defined as
under geo-statistical assumptions, then the data is defined as  where
where  and
and  respectively are observations and response levels. Let
respectively are observations and response levels. Let  be the vector of associated covariates. Intuitively then,
be the vector of associated covariates. Intuitively then,  | (12) |
 are
are  -dimensional covariates,
-dimensional covariates,  a
a  vector of coefficients, and
vector of coefficients, and  a
a  spatially-dependent error. Let
spatially-dependent error. Let  ,
,  , and
, and  , then equation (12) is written in matrix form as:
, then equation (12) is written in matrix form as:  | (13) |
 for
for  where
where  is a non-diagonal symmetric and positive definite matrix.
is a non-diagonal symmetric and positive definite matrix.4.2.1. Spatial Generalized Linear Mixed Model (SGLMM)
- The framework of the ordinal SGLMM is:
 | (14) |
 is an
is an  design matrix,
design matrix,  is a
is a  matrix of fixed effects coefficients, and
matrix of fixed effects coefficients, and  spatially-dependent errors that capture all unobserved errors arising from the influence of common features for observations within certain proximal distances. The
spatially-dependent errors that capture all unobserved errors arising from the influence of common features for observations within certain proximal distances. The  element of the
element of the  spatial covariance matrix
spatial covariance matrix  is
is  parameterized by
parameterized by  | (15) |
 represents variability of the spatial process, and
represents variability of the spatial process, and  is a monotonic correlation function with a correlation decay parameter
is a monotonic correlation function with a correlation decay parameter  measuring the strength of spatial dependence over the Euclidean distance
measuring the strength of spatial dependence over the Euclidean distance  between locations
between locations  and
and  [22]. By maintaining the ordinal probit form, and assuming, following [22], that the spatial error term
[22]. By maintaining the ordinal probit form, and assuming, following [22], that the spatial error term  also represents random measurement error in unexplained explanatory variables (the nugget), then
also represents random measurement error in unexplained explanatory variables (the nugget), then  | (16) |
 | (17) |
 is an indicator function equalling 1 when
is an indicator function equalling 1 when  and 0 otherwise.
and 0 otherwise.4.2.1.1. Bayesian Estimation via MCMC
- Using the Bayesian approach [17], the posterior likelihood is:
 | (18) |
 is the data vector,
is the data vector,  is latent regression function assigning values to observable ordered data,
is latent regression function assigning values to observable ordered data,  is distribution of the latent errors incorporated via data augmentation, and
is distribution of the latent errors incorporated via data augmentation, and  are prior densities for the model parameters. The use of MCMC sampling, especially Gibbs techniques [20], requires us to derive full conditionals for all parameters. We assume following [22] non-informative priors for the regression coefficients and inverse gamma for the spatial parameters. Thus, the full conditionals of all parameters have the following functional forms:
are prior densities for the model parameters. The use of MCMC sampling, especially Gibbs techniques [20], requires us to derive full conditionals for all parameters. We assume following [22] non-informative priors for the regression coefficients and inverse gamma for the spatial parameters. Thus, the full conditionals of all parameters have the following functional forms:  | (19) |
 | (20) |
 | (21) |
 | (22) |
 | (23) |
 | (24) |
4.2.2. The CG-SOP Model
- To create a workable geo-statistical framework, we define an ordinal random field
 by assuming that the spatially-dependent errors
by assuming that the spatially-dependent errors  are latent, but together with some covariates, are assigning values to
are latent, but together with some covariates, are assigning values to  according to the multivariate regression function:
according to the multivariate regression function:  | (25) |
 element of
element of  is
is  parameterized by
parameterized by  , where parameters are as previously defined. The link between
, where parameters are as previously defined. The link between  and
and  is seen by assuming that for a vector of thresholds
is seen by assuming that for a vector of thresholds  the ordinal random field,
the ordinal random field,  is obtained by quantizing
is obtained by quantizing  at levels
at levels  thus, culminating in multiple binary outcomes:
thus, culminating in multiple binary outcomes:  | (26) |
 Our objective is to model the probability of an observation
Our objective is to model the probability of an observation  at site
at site  falling at the
falling at the  category. This probability is determined by
category. This probability is determined by 
 | (27) |
 is n-dimensional, and determined by the density of
is n-dimensional, and determined by the density of  Therefore, the likelihood of the data is the integral of an n-dimensional multivariate normal distribution taking values in the interval
Therefore, the likelihood of the data is the integral of an n-dimensional multivariate normal distribution taking values in the interval 
 | (28) |
4.2.2.1. Bayesian Estimation via MCMC
- Following the Bayesian methodology [20], the full joint posterior distribution for all unknown parameters is completely defined by the posterior likelihood:
 | (29) |
 is an indicator variable, and
is an indicator variable, and  being the joint prior density, specifies uncertainty on the respective estimated parameters. We complete the specification by imposing non-information priors on the regression parameters and inverse gamma on the spatial parameters [16, 17].The full conditional posterior distributions of each parameter [20] have the following functional forms:
being the joint prior density, specifies uncertainty on the respective estimated parameters. We complete the specification by imposing non-information priors on the regression parameters and inverse gamma on the spatial parameters [16, 17].The full conditional posterior distributions of each parameter [20] have the following functional forms:  | (30) |
 | (31) |
 | (32) |
 | (33) |
 | (34) |
4.3. Posterior Predictions and Mapping
- A key goal of this study is to produce a smooth map of household poverty-severity risk in Ghana by predicting the outcome at new locations. We achieve this via kriging [23-25]. Define
 to be the map of predictive ordered responses corresponding to poverty-severity risk at unsampled locations
to be the map of predictive ordered responses corresponding to poverty-severity risk at unsampled locations  The predictions are derived from the conditional probabilities that a new location falls in category
The predictions are derived from the conditional probabilities that a new location falls in category  given the observed data. In ordered modelling, these conditional probabilities cannot be obtained via direct MCMC simulations; they are obtained by calculating
given the observed data. In ordered modelling, these conditional probabilities cannot be obtained via direct MCMC simulations; they are obtained by calculating  using MCMC integration and data augmentation, where
using MCMC integration and data augmentation, where  is a latent variable at new locations, being equal to
is a latent variable at new locations, being equal to  in both OP GLM and SGLMM, and
in both OP GLM and SGLMM, and  for the CG-SOP model.Following the Bayesian approach, the predictive posterior distributions
for the CG-SOP model.Following the Bayesian approach, the predictive posterior distributions  is augmented by
is augmented by  to give:
to give:  | (35) |
 | (36) |
 | (37) |
4.4. Model Evaluation and Validation Measures
- The posterior predictive densities are the distribution of possible future observations arising from the current model. We determine a checking function for both predicted data and actual observations to assess predictive model fit. In line with this, we proceed by first randomly splitting the dataset into two equal parts: one part (8375) as training set and the other (8375) as a validation set [26]. In standard ML analyses, a repertoire of fit measures includes
 and likelihood-ratio
and likelihood-ratio  statistic. In Bayesian analyses, predictive model selection is checked within the framework of Bayesian decision theory [26, 27, 20], where prediction accuracy is based on the Bayesian expected loss (BEL). The loss function
statistic. In Bayesian analyses, predictive model selection is checked within the framework of Bayesian decision theory [26, 27, 20], where prediction accuracy is based on the Bayesian expected loss (BEL). The loss function  represented here by the additive loss function estimates the loss incurred in predicting
represented here by the additive loss function estimates the loss incurred in predicting  by
by  at location; assigning zero loss to correct predictions. For the multi-categorical application, the additive loss function in respect of
at location; assigning zero loss to correct predictions. For the multi-categorical application, the additive loss function in respect of  new locations is expressed as:
new locations is expressed as:  | (38) |
 penalizes the loss incurred for mis-predicting category
penalizes the loss incurred for mis-predicting category  when the true category is
when the true category is  If
If  is set to 1, equation (38) translates to the well-known mis-prediction rate (MPR) (defined as the proportion of predictions that are incorrect), and optimal Bayes’ prediction is attained by choosing the value for
is set to 1, equation (38) translates to the well-known mis-prediction rate (MPR) (defined as the proportion of predictions that are incorrect), and optimal Bayes’ prediction is attained by choosing the value for  that minimizes (38), leading to the expected value of the loss function:
that minimizes (38), leading to the expected value of the loss function:  | (39) |
 that reports the highest estimated probability. In assessing the models, it is important to note the difference between the estimated BEL
that reports the highest estimated probability. In assessing the models, it is important to note the difference between the estimated BEL  (using the training data) and validation BEL
(using the training data) and validation BEL  (using the validation data) for each model. A comparatively large difference shows a model is making incorrect predictions [26, 20]. For the ordered data, it is also possible for the model to suffer greater loss for predictions that are farther from the truth. Thus, we assign loss coefficients
(using the validation data) for each model. A comparatively large difference shows a model is making incorrect predictions [26, 20]. For the ordered data, it is also possible for the model to suffer greater loss for predictions that are farther from the truth. Thus, we assign loss coefficients  and get the absolute mis-prediction rate (AMPR) defined as:
and get the absolute mis-prediction rate (AMPR) defined as: | (40) |
 is the true value and
is the true value and  is the prediction. In principle, the AMPR accounts for the size of the mis-prediction. We apply all the fit measures (MPR, AMPR, and BEL) to determine the models’ ability to correctly forecast future values.
is the prediction. In principle, the AMPR accounts for the size of the mis-prediction. We apply all the fit measures (MPR, AMPR, and BEL) to determine the models’ ability to correctly forecast future values.5. Results
- Before proceeding to perform spatial analysis, we need to confirm that the data exhibits significant spatial correlation. In this regard, the simple OP GLM was fitted to the data. Although spatial correlation in the raw data is of interest, we were primarily interested in whether there was correlation in model residuals once any correlation explained by the explanatory variables has been accounted for by the simple OP GLM. Figure 1 shows the classical semi-variogram estimator by [24], which is based on the residuals obtained after fitting the GLM.It is clear from Figure 1 that there is a spatial trend beyond what was described by the mean structure alone. The semi-variogram shows an increasing trend from the origin, indicating lag-dependent variation. Therefore we expect high variability in the covariance parameters.
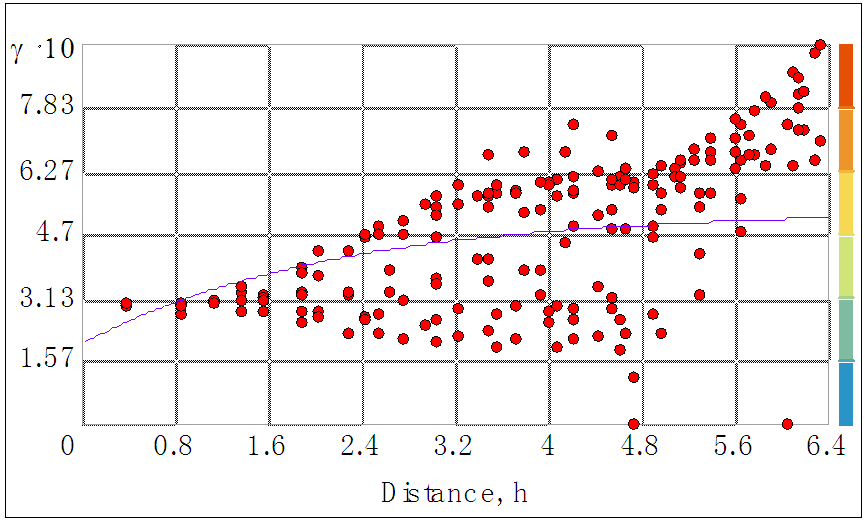 | Figure 1. Classical Semi-Variogram |
|
 to be 0.035, the CG-SOP model estimate of
to be 0.035, the CG-SOP model estimate of  is 0.041. These disparities are largely due to the differential parameterizations used for each model.We use the
is 0.041. These disparities are largely due to the differential parameterizations used for each model.We use the  estimate to determine the effective range of spatial correlation, commonly defined as the distance beyond which the correlation reduces to less than 5% of variance. For the exponential correlation function, the effective range is
estimate to determine the effective range of spatial correlation, commonly defined as the distance beyond which the correlation reduces to less than 5% of variance. For the exponential correlation function, the effective range is  for the SGLMM, and
for the SGLMM, and  for the CG-SOP model [20]. Thus, the estimated effective range for the response surface of the SGLMM is 66 kilometers, suggesting lower spatial variation compared to the CG-SOP model with an effective range of 73 kilometers. Though both models appear to exhibit large ranges relative to the maximum inter-site distance of
for the CG-SOP model [20]. Thus, the estimated effective range for the response surface of the SGLMM is 66 kilometers, suggesting lower spatial variation compared to the CG-SOP model with an effective range of 73 kilometers. Though both models appear to exhibit large ranges relative to the maximum inter-site distance of  the CG-SOP model does better at larger lags (see Figures 2 and 3).
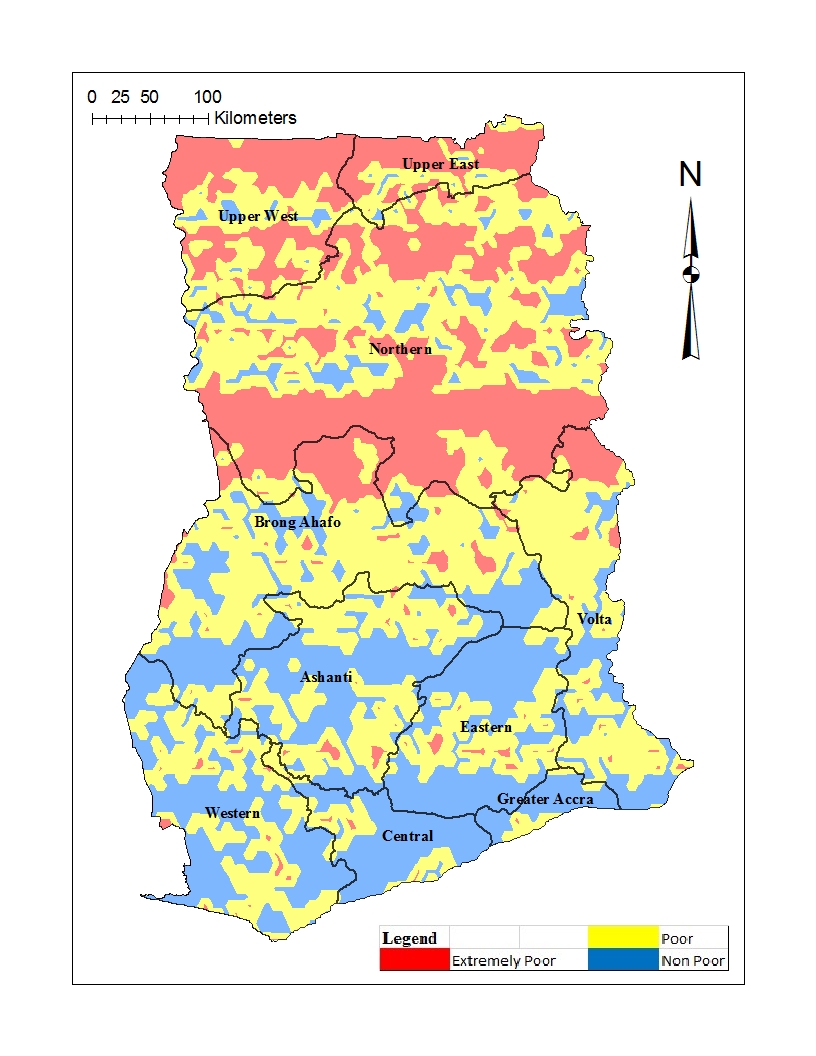
the CG-SOP model does better at larger lags (see Figures 2 and 3).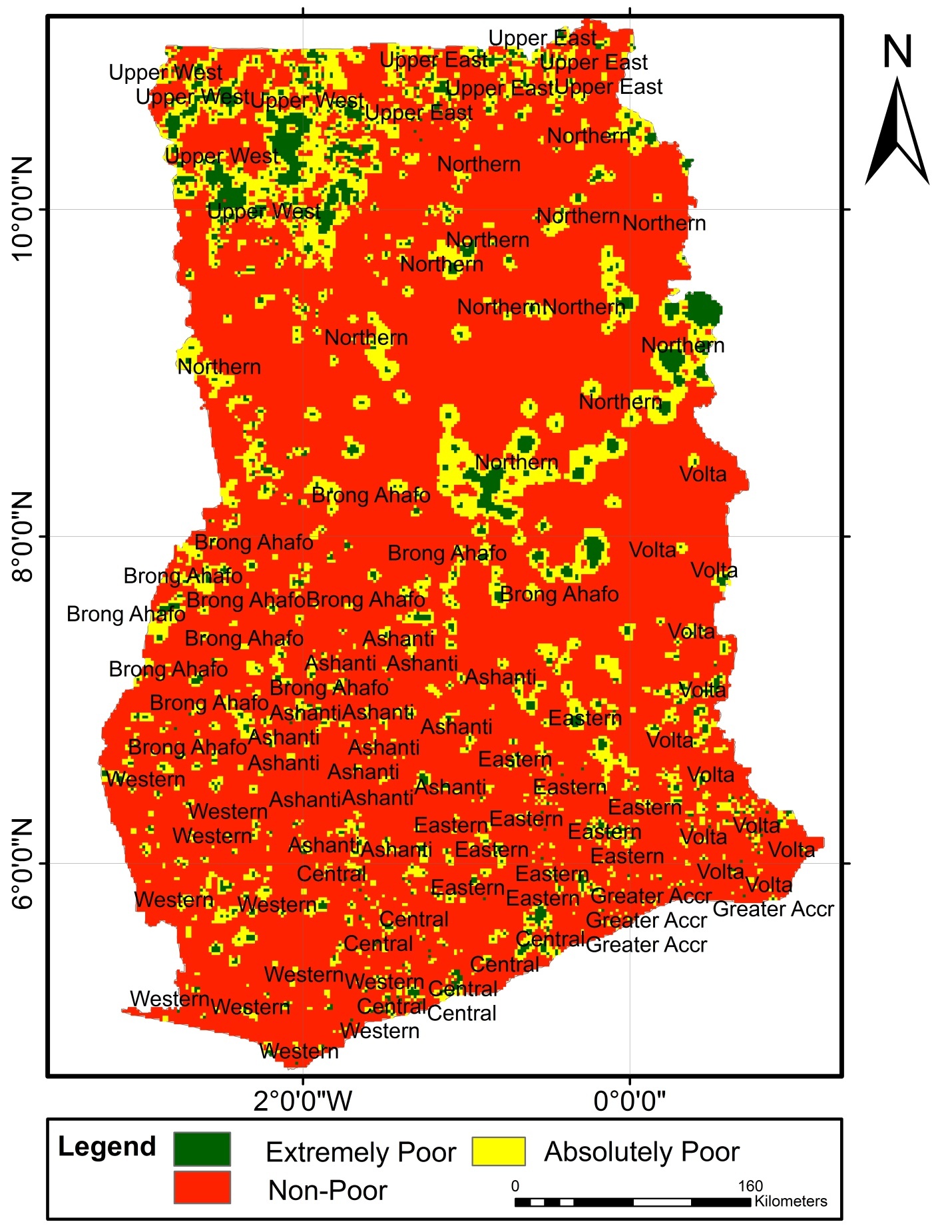 | Figure 2. Poverty-Severity Map of Ghana Using the SGLMM |
 | Figure 3. Poverty-Severity Map of Ghana using the CG-SOP Model |
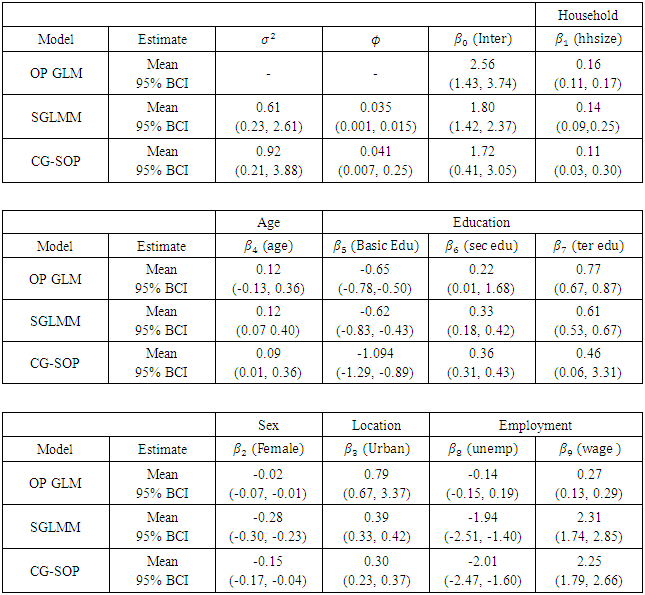
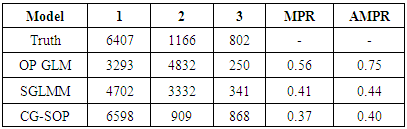
 estimate in all three models shows a positive link between household size and poverty severity, showing that poverty severity levels tend to increase from non-poor to extremely poor for sites with higher household sizes. Age was found not statistically significant in the OP GLM. Higher education was found to reduce the risk of extreme poverty in all three models. Extreme poverty-risk was also related to the residency of household head, with urbanites being at lower risks of extreme poverty. The impact employment has on poverty-risk in this study is typical; showing lowest risk for wage employed householders in the SGLMM and CG-SOP models. Its effect in the non-spatial OP GLM was however mixed. Unemployed was found not to be statistically significant in this model.Table 2 summarizes and compares results for predictive abilities whiles Table 3 does same for Bayesian expected loss (BEL) for each specification. Clearly, results of Table 2 identified the CG-SOP as the preferred model for prediction. Its predicted values come closest to the truth compared to the aspatial cumulative OP GLM and the SGLMM. Closely following the CG-SOP in predictive performance is the SGLMM. Thus, incorporating spatial dependence in the modelling framework improves estimation and prediction as evidenced by the performance of the two spatial models.
estimate in all three models shows a positive link between household size and poverty severity, showing that poverty severity levels tend to increase from non-poor to extremely poor for sites with higher household sizes. Age was found not statistically significant in the OP GLM. Higher education was found to reduce the risk of extreme poverty in all three models. Extreme poverty-risk was also related to the residency of household head, with urbanites being at lower risks of extreme poverty. The impact employment has on poverty-risk in this study is typical; showing lowest risk for wage employed householders in the SGLMM and CG-SOP models. Its effect in the non-spatial OP GLM was however mixed. Unemployed was found not to be statistically significant in this model.Table 2 summarizes and compares results for predictive abilities whiles Table 3 does same for Bayesian expected loss (BEL) for each specification. Clearly, results of Table 2 identified the CG-SOP as the preferred model for prediction. Its predicted values come closest to the truth compared to the aspatial cumulative OP GLM and the SGLMM. Closely following the CG-SOP in predictive performance is the SGLMM. Thus, incorporating spatial dependence in the modelling framework improves estimation and prediction as evidenced by the performance of the two spatial models.
|
 and validation
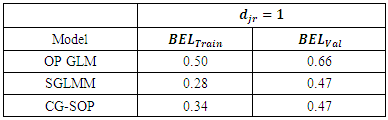
and validation  data. A significantly large difference between
data. A significantly large difference between  and
and  indicates a model is mis-predicting the outcomes [26]. Table 3 presents results of the analysis, showing the OP-GLM and SGLMM as culprits in this regard. The CG-SOP has the smallest difference between
indicates a model is mis-predicting the outcomes [26]. Table 3 presents results of the analysis, showing the OP-GLM and SGLMM as culprits in this regard. The CG-SOP has the smallest difference between  and
and 
|
6. Discussion
- Geo-statistical OP models that ordered the population into three distinct categories (non-poor, poor, and extremely poor) were employed. The models were built to forecast the risk of regional household poverty-severity in Ghana. Inference compared MCMC simulations from the aspatial OP GLM and ordinal SGLMM with the CG-SOP model. The large difference in predictive ability between the aspatial and the spatial models confirms the limitation of the simple OP GLM, and by extension, all aspatial models when dealing with spatial correlation in geo-referenced data. Bayesian inference via MCMC produced estimates of spatial parameters and subsequently, posterior predictive probabilities at unobserved sites. It is difficult to see how traditional aspatial methods such as the ordinary least squares (OLS) would estimate spatial parameters. The OP GLM for instance, though easy to formulate and estimate, does not sufficiently exploit sample information, thus producing biased results. Although the 95% confidence intervals (CIs) for the betas of the OP GLM (Table 1) were consistently narrower, this was hard to believe. Of course, as sample size increases, the CIs correspondingly decrease. However, if the increase in sample size results from the inclusion of more heterogeneous observations, narrowing of the CIs is anomalous.The CG-SOP model results, summarized by the 95% credible intervals, and associated spatial parameters
 and
and  show a relatively stronger spatial dependence. Results of the ordinal SGLMM are similarly distributed. However, the SGLMM overestimates
show a relatively stronger spatial dependence. Results of the ordinal SGLMM are similarly distributed. However, the SGLMM overestimates  suggesting a lower spatial variation than the CG-SOP model, especially at large lags (Figures 2 and 3). The results thus suggest that the CG-SOP is the preferred model for estimation and prediction. Regarding our application, higher levels of extreme poverty is predicted in most of the northern half of the country, extending to the borders with Togo, Cote d'Ivoire, and Burkina Faso. This region lies in the dry savannah ecological zone with short seasonal rainfalls, rendering agricultural lands unproductive for the predominantly farming populations in the area.Low poverty is predicted in much of the forested south and coastal parts of the country. The Greater Accra region is predicted with the lowest risk of extreme poverty, as expected. The seaports and heavy industrial plants (along with the recently discovered crude oil) are found predominantly across the middle and coastal belts of the country, where both the rich agricultural lands and tropical rain forest coincide. Heavy mining of gold, diamond and other mineral resources over the last half-century have all contributed significantly to the low levels of poverty predicted at various locations in the south of the country. However, pockets of poverty observed at different scales in the southernmost parts of the country reflect urban and peri-urban deprivations. These could be due to disturbances linked to short range environmental factors, reiterating the fact that even over much smaller distances, local disturbances can have a distinct effect on the distribution of the poor.The spatial disparities of poverty-severity revealed by this study conform to expert opinion that in a geographic environment, there can be a dominant non-stochastic relationship between economic wellbeing and the spatial dynamics of a country [28, 29]. Application of the modelling techniques to the socio-econometric problem considered here is novel, and demonstrates our contribution to the wider scope of spatial-statistical methods. We model multi-categorical socio-econometric data in a spatial measurement framework that recognizes the ordinal nature of the variable. In our application, we depart from the auto regressive (AR) approach by directly embedding the ordinal variable within the distributional framework of a latent spatial GRF, and this marks a significant innovation.
suggesting a lower spatial variation than the CG-SOP model, especially at large lags (Figures 2 and 3). The results thus suggest that the CG-SOP is the preferred model for estimation and prediction. Regarding our application, higher levels of extreme poverty is predicted in most of the northern half of the country, extending to the borders with Togo, Cote d'Ivoire, and Burkina Faso. This region lies in the dry savannah ecological zone with short seasonal rainfalls, rendering agricultural lands unproductive for the predominantly farming populations in the area.Low poverty is predicted in much of the forested south and coastal parts of the country. The Greater Accra region is predicted with the lowest risk of extreme poverty, as expected. The seaports and heavy industrial plants (along with the recently discovered crude oil) are found predominantly across the middle and coastal belts of the country, where both the rich agricultural lands and tropical rain forest coincide. Heavy mining of gold, diamond and other mineral resources over the last half-century have all contributed significantly to the low levels of poverty predicted at various locations in the south of the country. However, pockets of poverty observed at different scales in the southernmost parts of the country reflect urban and peri-urban deprivations. These could be due to disturbances linked to short range environmental factors, reiterating the fact that even over much smaller distances, local disturbances can have a distinct effect on the distribution of the poor.The spatial disparities of poverty-severity revealed by this study conform to expert opinion that in a geographic environment, there can be a dominant non-stochastic relationship between economic wellbeing and the spatial dynamics of a country [28, 29]. Application of the modelling techniques to the socio-econometric problem considered here is novel, and demonstrates our contribution to the wider scope of spatial-statistical methods. We model multi-categorical socio-econometric data in a spatial measurement framework that recognizes the ordinal nature of the variable. In our application, we depart from the auto regressive (AR) approach by directly embedding the ordinal variable within the distributional framework of a latent spatial GRF, and this marks a significant innovation. 7. Conclusions and Recommendations
- An integral objective of this study was to improve prediction, especially when the data is collected over large geographical areas. The results suggest that the CG-SOP model is well suited to this objective. The study has identified positive correlation with respect to the distribution of poverty. Individuals in specific locations tend to uniformly experience specific categories of poverty regardless of their personal circumstances, thus, providing an empirical spatial character of poverty in Ghana. We see a pictorial evidence of this in the predictive maps (Figures 1 and 2). Poverty eradication efforts should be directed towards areas with high posterior ranks. For example, extreme poverty incidence in the Upper West and some areas at the border between the Northern and Brong Ahafo regions, extending eastwards, may be of concern. Conversely, stakeholders may wish to preserve areas with low incidence of extreme poverty.
8. Future Work
- While we are satisfied with the CG-SOP model per our stated objectives, it needs to be noted that our model did not account for non-stationarity in the underlying spatial process. We assumed a stationary spatial process, meaning that spatial correlation between locations of the same distance remains the same throughout the region [30]. Non-stationarity allows both the data and covariates to vary spatially. Addressing non-stationarity further improves both model fit and prediction.