-
Paper Information
- Previous Paper
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
American Journal of Intelligent Systems
p-ISSN: 2165-8978 e-ISSN: 2165-8994
2019; 9(1): 39-48
doi:10.5923/j.ajis.20190901.03

Adaptive Fuzzy Output-Feedback Sliding Mode Control for Switched Uncertain Nonlinear Systems with Input Saturation
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLChiang-Cheng Chiang, Wei-Tse Kao
Department of Electrical Engineering, Tatung University, Taipei, Taiwan, Republic of China
Correspondence to: Chiang-Cheng Chiang, Department of Electrical Engineering, Tatung University, Taipei, Taiwan, Republic of China.
| Email: |  |
Copyright © 2019 The Author(s). Published by Scientific & Academic Publishing.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

The paper deals with the problem of adaptive fuzzy output-feedback sliding mode control for switched uncertain nonlinear systems with input saturation. Based on sliding mode control technique, an adaptive fuzzy sliding mode controller is designed for switched uncertain nonlinear systems by using fuzzy logic systems to approximate the uncertain functions. By means of state variable filters, a state observer is constructed to solve the problem of unmeasured states of the system. Moreover, input saturation which is one of the most important input constraints usually occurs in many industrial control systems. The controller is designed by choosing a suitable Lyapunov function. Actually, it is verified that all the signals in the closed-loop system can not only guarantee uniformly ultimately bounded, but also achieve well performance. Finally, some computer simulation results of a practical example are illustrated to show the performance of the proposed approach.
Keywords: Switched nonlinear systems, Lyapunov function, Sliding mode control, Input saturation, Fuzzy logic system
Cite this paper: Chiang-Cheng Chiang, Wei-Tse Kao, Adaptive Fuzzy Output-Feedback Sliding Mode Control for Switched Uncertain Nonlinear Systems with Input Saturation, American Journal of Intelligent Systems, Vol. 9 No. 1, 2019, pp. 39-48. doi: 10.5923/j.ajis.20190901.03.
Article Outline
1. Introduction
- Recently, the control problem of switched uncertain nonlinear systems has attracted much attention [1], [2]. For non-strict feedback uncertain switched nonlinear systems, an adaptive fuzzy output-feedback stabilization control method has been already studied in [1]. The adaptive fuzzy control problem of nonlinear switched stochastic pure feedback systems has been discussed in Yin et al. [2]. Also, a lot of decentralized controller design methods for switched nonlinear systems have been investigated and various successful control applications have been developed. Meanwhile, many research results of strict feedback form systems or non-strict feedback form systems have been proposed [3], [4]. In [3], an adaptive fuzzy controller has been presented for a class of switched uncertain nonlinear systems with strict-feedback form. Liu et al. [4] focus on backstepping-based adaptive neural control for switched nonlinear systems in nonstrict-feedback form.Input saturation often occurs in practical engineering, which is a source of limiting the system performance severely and even leads to the system instability. Recently, the problem of input saturation has attracted much attention. Zhou et al. [5] presents an adaptive fuzzy control approach for a class of uncertain non-strict feedback systems with input saturation and output constraint. In [6], a fuzzy backstepping output tracking control approach was developed for a class of single-input-single-output (SISO) strict feedback nonlinear systems with unmeasured states and input saturation.Sliding mode controller (SMC) is a powerful technique that has been successfully applied to control nonlinear systems with external disturbances and parameter variations. The SMC as ordinary design tools for control systems have been well accepted, and the major benefits of the SMC are the following: 1) its robustness against for a class of system uncertainties or perturbations; 2) a fast response and a good transient performance. Based on the aforementioned advantages, sliding mode control has been applied widely [7-9]. In [8], adaptive sliding mode approach was presented to handle disturbances of unknown bounds in nonlinear systems. Zhang et al. [9] proposed the sliding mode controller to tackle the trajectory tracking problems for discrete non-affine nonlinear systems with disturbance.Fuzzy logic systems (FLSs) are employed to approximate the unknown nonlinear functions. Based on the universal approximation theorem, some stable adaptive fuzzy control schemes have been developed [10-12, 16-17] to overcome the difficulty of extracting linguistic control rule from experts and to cope with the system parameter changes. Zhao et al. [10] introduced an adaptive fuzzy hierarchical sliding mode controller to treat the problem for a class of multi-input multi-output unknown nonlinear time-delay systems with input saturation By means of two effective technical measures, more relaxed designs of discrete-time Takagi–Sugeno fuzzy-model-based observers was presented in [12]. The observer-based robust adaptive fuzzy control for MIMO nonlinear uncertain systems with delayed output has been discussed in [16]. Hwang et al. [17] presented an adaptive fuzzy hierarchical sliding-mode control for the trajectory tracking of uncertain under-actuated nonlinear dynamic systems.In this paper, a fuzzy sliding mode control approach based on an observer is presented for a class of switched nonlinear systems with input saturation. Comparing with the existing results, the main features and contributions of this paper can be listed below.(i) Based on the adaptive fuzzy control method, input saturation is considered in the design procedure, which is more common for application in practical engineering.(ii) By sliding mode control technique design, an adaptive fuzzy sliding mode controller is designed for the system via using fuzzy logic systems to approximate uncertain functions, and the fuzzy state observer is employed to estimate the unavailable state for measurement.(iii) Choosing an appropriate Lyapunov function, it is theoretically guaranteed that all the signals in the closed-loop system are uniformly ultimately bounded and obtain good system performance under our designed controller.The remainder of this paper is organized as follows. Section II describes the problem formulation and preliminaries together with the definition of fuzzy logic systems (FLSs) are given. In Section III, adaptive fuzzy sliding mode controller and observer are designed for a class of switched uncertain nonlinear systems with input saturation and the stability analysis of the whole system is also verified by Lyapunov functional. Some computer simulation results of a practical example are indicated to show the performance of the proposed approach in Section IV. Finally, the conclusion is drawn in Section V.
2. Problem Statement and Preliminaries
2.1. System Description
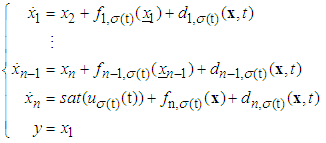
- Consider a class of switched uncertain nonlinear systems with input saturation in strict-feedback from [15]:
 | (1) |
 is the system state vector which is assumed to be unavailable for measurement,
is the system state vector which is assumed to be unavailable for measurement, 
 and
and  are input and output of the system output, respectively. The function
are input and output of the system output, respectively. The function  , is a switching signal which is assumed to be a piecewise continuous (from the right) function of time. If
, is a switching signal which is assumed to be a piecewise continuous (from the right) function of time. If  , then we say the k-th switched subsystem is active and the remaining switched subsystems are inactive.
, then we say the k-th switched subsystem is active and the remaining switched subsystems are inactive.  are unknown smooth nonlinear functions,
are unknown smooth nonlinear functions,  are unknown external bound disturbances.
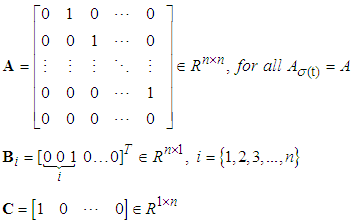
are unknown external bound disturbances.  denotes the nonlinear saturation characteristic.Eq. (1) can be rewritten as
denotes the nonlinear saturation characteristic.Eq. (1) can be rewritten as | (2) |
 Assumption 1:
Assumption 1:  , where
, where  are unknown functions.In order to deal with the control constraints for convenience, the saturation function
are unknown functions.In order to deal with the control constraints for convenience, the saturation function  can be rewritten as
can be rewritten as | (3) |
 be expressed as
be expressed as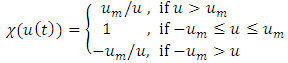 | (4) |
 will converge asymptotically to a neighborhood of zero.
will converge asymptotically to a neighborhood of zero.2.2. Description of Fuzzy Logic Systems
- The fuzzy logic system performs a mapping from
 to
to  . Let
. Let  where
where  ,
,  . The fuzzy rule base consists of a collection of fuzzy IF-THEN rules:
. The fuzzy rule base consists of a collection of fuzzy IF-THEN rules: | (5) |
 and
and  are the input and output of the fuzzy logic system,
are the input and output of the fuzzy logic system,  and
and  are fuzzy sets in
are fuzzy sets in  and
and  , respectively. The fuzzifier maps a crisp point
, respectively. The fuzzifier maps a crisp point  into a fuzzy set in
into a fuzzy set in  . The fuzzy inference engine performs a mapping from fuzzy sets in
. The fuzzy inference engine performs a mapping from fuzzy sets in  to fuzzy sets in
to fuzzy sets in  , based upon the fuzzy IF-THEN rules in the fuzzy rule base and the compositional rule of inference. The defuzzifier maps a fuzzy set in
, based upon the fuzzy IF-THEN rules in the fuzzy rule base and the compositional rule of inference. The defuzzifier maps a fuzzy set in  to a crisp point in
to a crisp point in  .The fuzzy systems with center-average defuzzifier, product inference and singleton fuzzifier are of the following form:
.The fuzzy systems with center-average defuzzifier, product inference and singleton fuzzifier are of the following form: | (6) |
 with each variable
with each variable  as the point at which the fuzzy membership function of
as the point at which the fuzzy membership function of  achieves the maximum value and
achieves the maximum value and  with each variable
with each variable  as the fuzzy basis function defined as
as the fuzzy basis function defined as | (7) |
 is the membership function of the fuzzy set.
is the membership function of the fuzzy set.3. Controller Design and Stability Analysis
3.1. Observer Design
- First, let the unknown nonlinear functions
 can be approximated over a compact set
can be approximated over a compact set  , by the fuzzy logic systems as follows:
, by the fuzzy logic systems as follows: | (8) |
 | (9) |
 is the fuzzy basis vector,
is the fuzzy basis vector,  are the corresponding adjustable parameter vectors of each fuzzy logic systems.Owing to the unavailable states of the system and the unavailable elements of the output error vector in many practical systems, the fuzzy logic systems (8) and (9) are not used to control nonlinear systems whose states are not obtained for measurement. Therefore, we must employ an observer to estimate. Let
are the corresponding adjustable parameter vectors of each fuzzy logic systems.Owing to the unavailable states of the system and the unavailable elements of the output error vector in many practical systems, the fuzzy logic systems (8) and (9) are not used to control nonlinear systems whose states are not obtained for measurement. Therefore, we must employ an observer to estimate. Let  be defined as the estimates of
be defined as the estimates of  . Then, we can obtain the following fuzzy logic systems as
. Then, we can obtain the following fuzzy logic systems as | (10) |
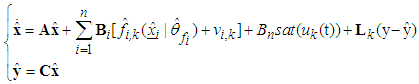 | (11) |
 .
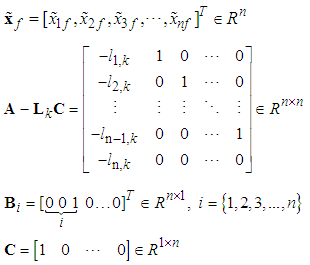
.  is the observer gain matrix to guarantee the characteristic polynomial of
is the observer gain matrix to guarantee the characteristic polynomial of  to be Hurwitz. Let us define the estimation error vector as
to be Hurwitz. Let us define the estimation error vector as  and
and , then by (2) and (11), we obtain
, then by (2) and (11), we obtain | (12) |
 belong to compact sets
belong to compact sets  respectively, which is defined as
respectively, which is defined as | (13) |
 | (14) |
 | (15) |
 | (16) |
 are the designed parameters, and M is the number of fuzzy inference rules. Let us define the optimal parameter vector
are the designed parameters, and M is the number of fuzzy inference rules. Let us define the optimal parameter vector  and
and  as follows:
as follows: | (17) |
 | (18) |
 and
and  are bounded in the suitable closed set
are bounded in the suitable closed set  and
and  , respectively.The parameter estimation errors can be defined as
, respectively.The parameter estimation errors can be defined as | (19) |
 | (20) |
 | (21) |
 | (22) |
 are the minimum approximation errors, which correspond to approximation errors obtained when optimal parameters are used.Applying (19) and (21), we obtain
are the minimum approximation errors, which correspond to approximation errors obtained when optimal parameters are used.Applying (19) and (21), we obtain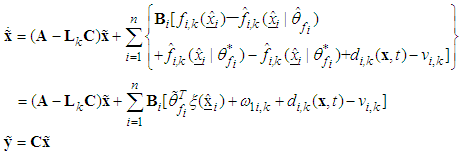 | (23) |
 | (24) |
 | (25) |
 , because not all states of the system are available for measurement. Hence, we could not obtain all elements of
, because not all states of the system are available for measurement. Hence, we could not obtain all elements of  . We will employ the state variable filters [14] to cope with this problem. First, we choose a stable filter
. We will employ the state variable filters [14] to cope with this problem. First, we choose a stable filter  as the following form:
as the following form: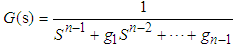 | (26) |
 are coefficients of the Hurwitz polynomial.
are coefficients of the Hurwitz polynomial. | (27) |
 | (28) |
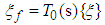
 The corresponding filtered signals are defined as follows:
The corresponding filtered signals are defined as follows:  | (29) |
 | (30) |
 | (31) |
 | (32) |
 | (33) |
 | (34) |
 Then, we define
Then, we define | (35) |
 | (36) |
 and
and  are the estimated of
are the estimated of  and
and  , respectively. The following assumptions are satisfied
, respectively. The following assumptions are satisfied | (37) |
 | (38) |
 and the parameter update laws as follows:
and the parameter update laws as follows: | (39) |
 | (40) |
 | (41) |
 | (42) |
 | (43) |
 and
and  are positive constants.Remark 1: Without loss of generality, the adaptive laws used in this paper are assumed that the parameter vectors are within the constraint sets or on the boundaries of the constraint sets but moving toward the inside of the constraint sets. If the parameter vectors are on the boundaries of the constraint sets but moving toward the outside of the constraint sets, we have to use the projection algorithm to modify the adaptive laws such that the parameter vectors will remain inside of the constraint sets. Readers can refer to reference [13]. The proposed adaptive law (40)-(43) can be modified as the following form:
are positive constants.Remark 1: Without loss of generality, the adaptive laws used in this paper are assumed that the parameter vectors are within the constraint sets or on the boundaries of the constraint sets but moving toward the inside of the constraint sets. If the parameter vectors are on the boundaries of the constraint sets but moving toward the outside of the constraint sets, we have to use the projection algorithm to modify the adaptive laws such that the parameter vectors will remain inside of the constraint sets. Readers can refer to reference [13]. The proposed adaptive law (40)-(43) can be modified as the following form: | (44) |
 is defined as
is defined as | (45) |
 | (46) |
 is defined as
is defined as | (47) |
 , if there exist symmetric positive definite matrix
, if there exist symmetric positive definite matrix  such that the following Lyapunov equation
such that the following Lyapunov equation | (48) |
 | (49) |
 | (50) |
 and the facts
and the facts  we obtain
we obtain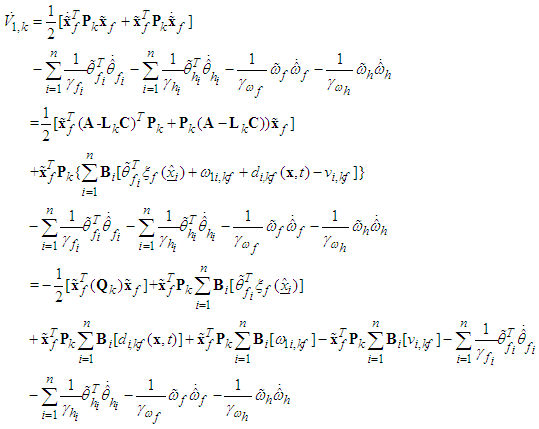 From Assumption 1, it yields
From Assumption 1, it yields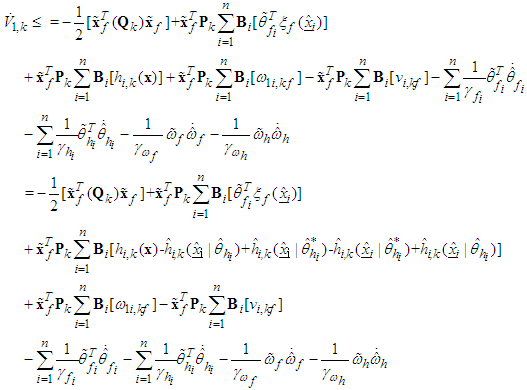 By employing (20) and (22), we can get
By employing (20) and (22), we can get | (51) |
 | (52) |
 (39), the above equation can be rewritten as
(39), the above equation can be rewritten as | (53) |
 from (53), and the estimation errors of the closed-loop system converges asymptotically to a neighborhood of zero based on Lyapunov synthesis approach. This completes the proof.
from (53), and the estimation errors of the closed-loop system converges asymptotically to a neighborhood of zero based on Lyapunov synthesis approach. This completes the proof.3.2. Controller Design
- Next, we design the observer-based incremental sliding mode controller. Define the sliding surfaces as follows:
 | (54) |
 for i=1, 2,…, n-1, are positive constants.Differentiating
for i=1, 2,…, n-1, are positive constants.Differentiating  with respect to time, we have
with respect to time, we have | (55) |
 | (56) |
 can be obtained by backward from
can be obtained by backward from  and
and  is a positive constant.Theorem 2: Consider the switched uncertain nonlinear system (1). The proposed adaptive fuzzy sliding mode controller defined by (56) with adaptive laws (40)-(43) guarantees that all signals of the closed-loop system are bounded, and converge to a neighborhood of zero.Proof: Consider the Lyapunov function candidate
is a positive constant.Theorem 2: Consider the switched uncertain nonlinear system (1). The proposed adaptive fuzzy sliding mode controller defined by (56) with adaptive laws (40)-(43) guarantees that all signals of the closed-loop system are bounded, and converge to a neighborhood of zero.Proof: Consider the Lyapunov function candidate  . Differentiating the and
. Differentiating the and  with respect to time, we can obtain
with respect to time, we can obtain | (57) |
 according to the density property of a real number [7].
according to the density property of a real number [7]. | (58) |
 into (56), we have
into (56), we have | (59) |
 from (59), and the all signals of the closed-loop system converges asymptotically to a neighborhood of zero based on Lyapunov synpaper approach. This completes the proof.
from (59), and the all signals of the closed-loop system converges asymptotically to a neighborhood of zero based on Lyapunov synpaper approach. This completes the proof.4. An Example and Simulation Results
- In this section, a series of simulation results of a switched RLC circuit [15] as depicted in Fig. 1, described by
 | (60) |
 ,
,  , and for each
, and for each  denotes the k-th capacitor,
denotes the k-th capacitor,  denotes the charge in the capacitor and the flux in the inductance, respectively, and
denotes the charge in the capacitor and the flux in the inductance, respectively, and  denotes the voltage. In the simulation, parameters of the RLC circuit are
denotes the voltage. In the simulation, parameters of the RLC circuit are  . The disturbances are assumed to be
. The disturbances are assumed to be  and
and 
 for
for  .In the implementation, five fuzzy sets are defined over interval [-2, 2] for
.In the implementation, five fuzzy sets are defined over interval [-2, 2] for  with labels
with labels 
 and their membership functions are
and their membership functions are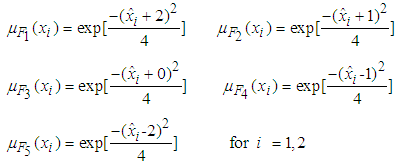
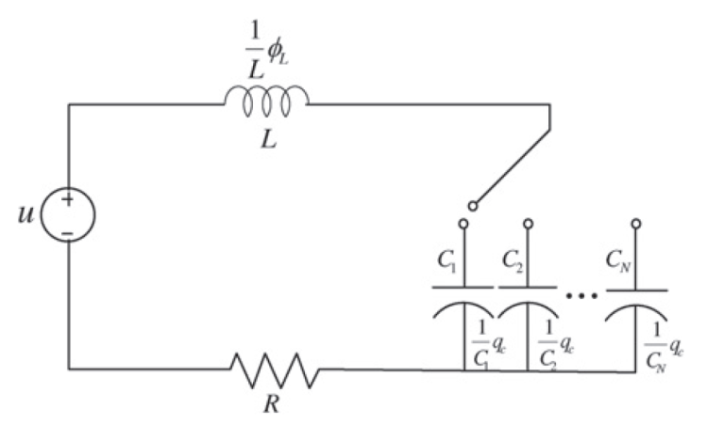 | Figure 1. The mass-spring-damper system |
 . The sample time is 0.01s. The sliding surfaces are selected as
. The sample time is 0.01s. The sliding surfaces are selected as  when k = 1,
when k = 1,  and when k = 2,
and when k = 2,  . The initial values are chosen as
. The initial values are chosen as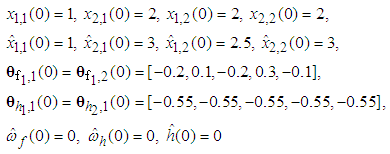 The other parameters are selected as
The other parameters are selected as 


 . The simulation results are shown in Figs.2-11. Fig.2 and Fig.3 show the trajectories of the system states and their estimation states and Fig.4-5 show the trajectories of the system states estimation error. Figs.6 shows the phase plane plot of the system states Figs.7 demonstrate the trajectories of the system functions. Figs.8 shows the switch signal of the system. The performance of sliding surface and the control signal are shown in Figs.9-10 and Fig.11, respectively.
. The simulation results are shown in Figs.2-11. Fig.2 and Fig.3 show the trajectories of the system states and their estimation states and Fig.4-5 show the trajectories of the system states estimation error. Figs.6 shows the phase plane plot of the system states Figs.7 demonstrate the trajectories of the system functions. Figs.8 shows the switch signal of the system. The performance of sliding surface and the control signal are shown in Figs.9-10 and Fig.11, respectively.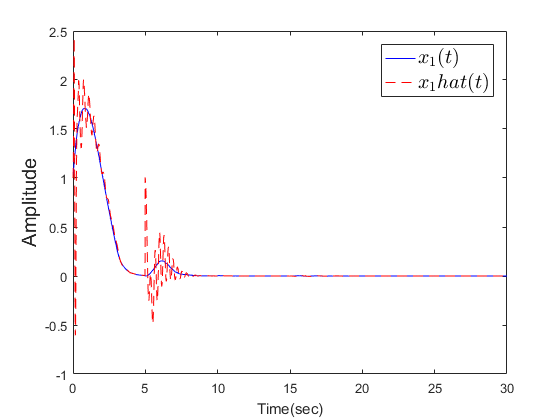 | Figure 2. Trajectories of  |
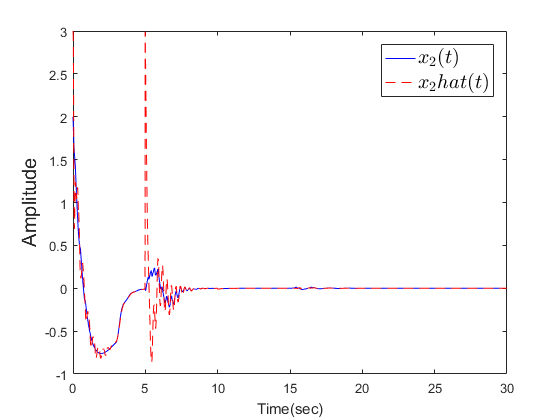 | Figure 3. Trajectories of  |
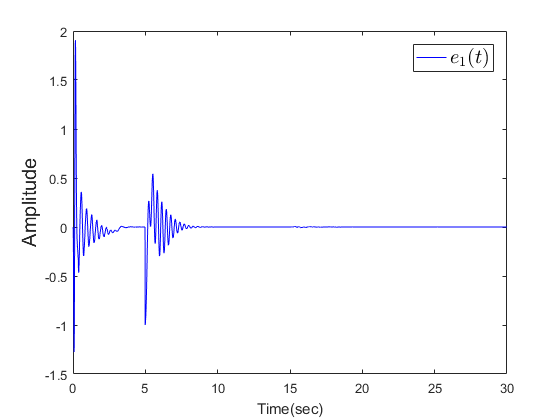 | Figure 4. The estimation error of  |
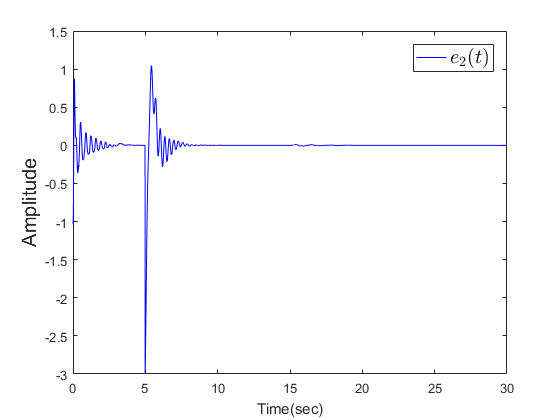 | Figure 5. The estimation error of  |
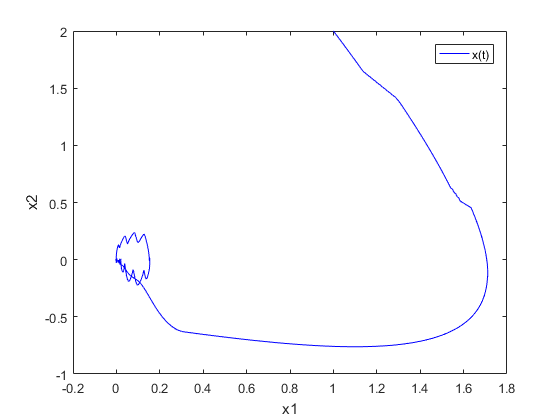 | Figure 6. Phase plane plot of the system states  |
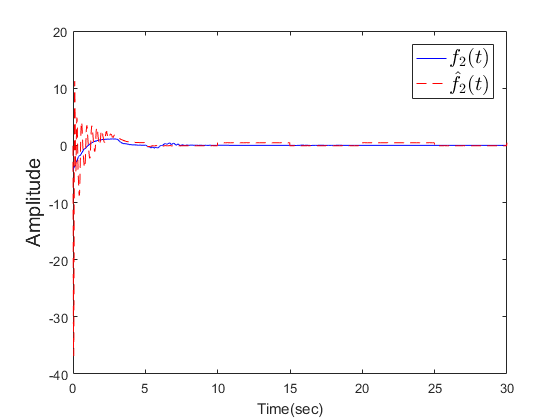 | Figure 7. Trajectories of  |
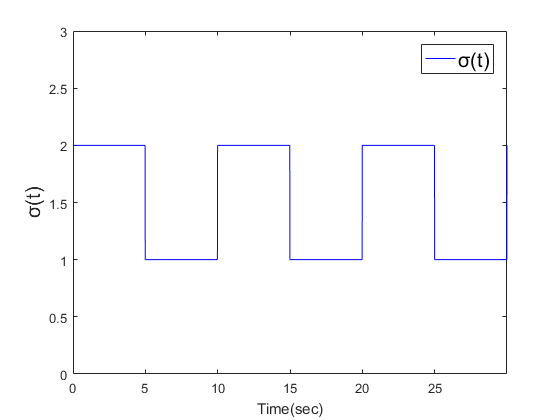 | Figure 8. Switch signal of the system |
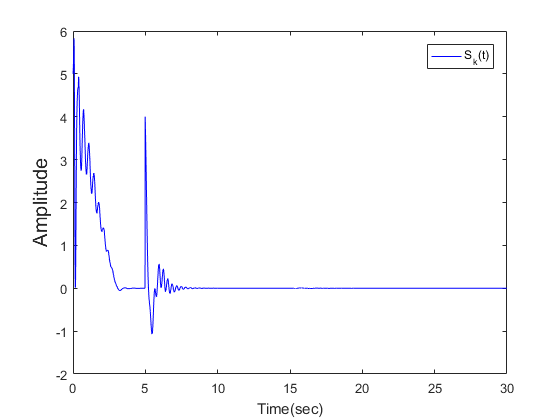 | Figure 9. The sliding surface  |
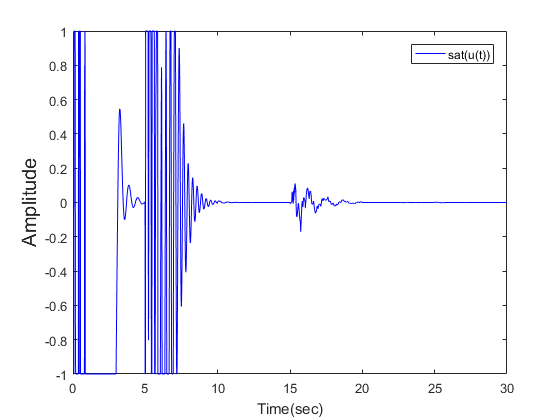 | Figure 10. Control signal with input saturation |
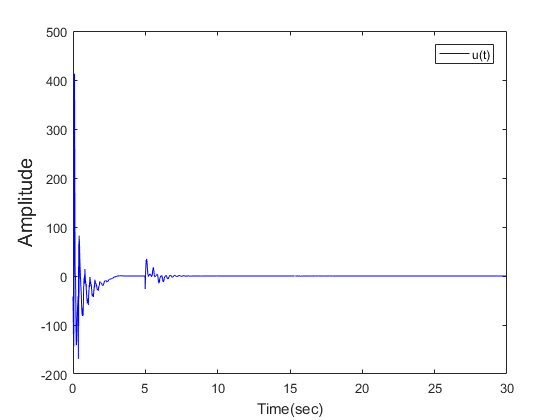 | Figure 11. Original control signal |
5. Conclusions
- An adaptive fuzzy observer-based sliding mode control approach has been proposed for a class of switched uncertain nonlinear systems with input saturation in strict-feedback form. A fuzzy state observer has been designed for estimating the unmeasured states with the help of FLS approximating the unknown functions. Based on the designed sliding mode controller, it can ensure the boundedness of the proposed sliding surfaces, which realizes the stability of system. By choosing an appropriate Lyapunov function, the proposed controller is designed to demonstrate that all the signals in the closed-loop system can not only guarantee uniformly ultimately bounded, but also achieve good performance. Finally, some computer simulation results of a practical example are illustrated to show the performance of the proposed control approach.