-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
American Journal of Intelligent Systems
p-ISSN: 2165-8978 e-ISSN: 2165-8994
2018; 8(1): 12-21
doi:10.5923/j.ajis.20180801.03

Best Vehicles Flow Traffic Light Controller Module Based on Particle Swarm Optimization (PSO)
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLEmad I. Abdul Kareem, Ayat Ismail Mejbel
Computer Science, Mustansiriyah University, Iraq
Correspondence to: Emad I. Abdul Kareem, Computer Science, Mustansiriyah University, Iraq.
| Email: |  |
Copyright © 2018 The Author(s). Published by Scientific & Academic Publishing.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

A traffic light control module base on PSO algorithm has been given to determining the optimal set of adjacent streets that are the candidate to choose the green period time providing the best vehicle flow. In our previous work [19] a visual traffic light monitoring module has been introduced. This module able to define the traffic conditions (crowded, normal and empty). The proposed control module should be able to integrate with the previous monitoring module to develop a new complete intelligent traffic light scheme. The controller module shows its ability to select a set of streets. The green period time will be devoted to these selected streets to reach the optimal vehicle flow through the traffic light’s intersections. The results show that the proposed control module improving the flow ratio about 72% to 96% with a different number of traffic lights.
Keywords: Transportation System, Traffic Light Controller System, Particle Swarm Optimization (PSO)
Cite this paper: Emad I. Abdul Kareem, Ayat Ismail Mejbel, Best Vehicles Flow Traffic Light Controller Module Based on Particle Swarm Optimization (PSO), American Journal of Intelligent Systems, Vol. 8 No. 1, 2018, pp. 12-21. doi: 10.5923/j.ajis.20180801.03.
Article Outline
1. Introduction
- Fast transportation systems and rapid transit systems are nerves of economic developments for any nation. All developed nations have a well-developed transportation system with efficient traffic control on road, rail and air. Transportation of goods, industrial products, manpower and machinery are the key factors which influence the industrial development of any country. Mismanagement and traffic congestion results in long waiting times, loss of fuel and money.It is therefore utmost necessary to have a fast, economical and efficient traffic control system for national development. The monitoring and control of city traffic are becoming a major problem in many countries. With the ever increasing number of vehicles on the road, the Traffic Monitoring Authority has to find new methods of overcoming such a problem [1, 2].The measures taken are development of new roads and flyovers in the middle of the city; building of several rings such as the inner ring road, middle ring road and outer ring road; introduction of city trains such as the light rapid transit (LRT), and monorails; restricting of large vehicles in the city during peak hours; and also development of sophisticated traffic monitoring and control systems. Growing numbers of road users and the limited resources provided by current infrastructures lead to ever increasing, traveling times [3, 4].One way to improve traffic flow and safety of the current transportation system is to apply automation and intelligent control methods to roadside infrastructure and vehicles [5]. A real time intelligent traffic light control module using Swarm algorithm has been presented in this work to configure many intersections in a city. Different number of intersections and streets have been used to evaluate the proposed module.The proposed traffic light module shows its ability to improve the vehicle flow through these intersections and streets. The vehicles flow improvement reached to 96%.
2. Particle Swarm Optimization (PSO)
- PSO is a heuristic global optimization method, originally provided in1995 by Kennedy and Eberhart. Particle Swarm Optimization (PSO) incorporates amalgamate swarming behaviors observed in schools of fish and flocks of birds. Since PSO is a population-based optimization tool, it can be implemented and applied easily to solve various optimization problems or the problems that can be transformed to optimization problems. The main power of PSO algorithms is its fast convergence as compared with many global optimization algorithms such that Simulated Annealing (SA), Genetic Algorithms (GA), and other global optimization algorithms. In PSO, there are other features such that no complex mathematical functions, no costly mathematical and doesn’t require a large amount of memory [7].Starting from a randomly distributed set of particles (potential solutions), the algorithms try to improve the solutions according to a quality measure (fitness function). The improvisation is performed through moving the particles around the search space by means of a set of simple mathematical expressions which model some antiparticle communications. These mathematical expressions, in their simplest and most basic form, suggest the movement of each particle toward its own best experienced position and the swarm’s best position so far, along with some random perturbations. There is an abundance of different variants using different updating rules [8]. The general structure of a canonical PSO algorithm [9] (see algorithm 1).
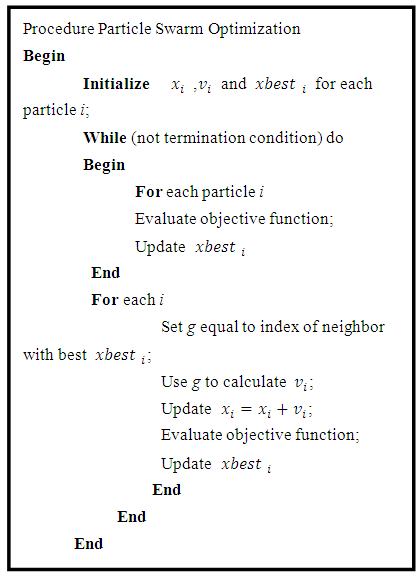 | Algorithm 1. The General structure of a canonical PSO algorithm [19] |
3. Literature Survey
- (Turky et al. 2009) used a GA to improve the performance of traffic lights and pedestrians crossing control in a unique intersection with four-way two-lane. The algorithm solved the limitations of traditional fixed-time control for passing vehicles and pedestrians, and it employed a dynamic control system to monitor two sets of parameters.(Madhavi Arora, and V. K. Banga, 2012) In this paper, we have discussed two techniques for traffic light control. Firstly, we have discussed morphological methods of edge detection for real time traffic control and then fuzzy logic. If we compare two methods we find that fuzzy logic is simple to implement than morphology method because morphology method is very lengthy procedure, even because it is edge detection method it does not perform well during night time, edges of certain vehicles will not able detect due to dark at night time, but fuzzy logic only counts the number of vehicles not deal with edges, it gives more accurate results, if we see cost factor then morphological method is less costly than fuzzy because morphology method only needs high quality camera not sensors which is less costlier.(Emad, I. Abdul Kareem, et al., 2014) this work uses small associative memory. It will learn all street traffic conditions. The controller uses a virtual data about the traffic condition of each street in the intersection. Thus, in an image processing module this video camera will provide visual information. This information will be processed to extract data about the traffic jam. This data represented in a look - up table, then smart decisions are needed when the intersection management determines the street case of each street at the intersection based on this look- up table.(Ali A.J et al., 2014) in this study, they plan to construct a Simulation Model (SM) incorporate with the Road Network Design Method (RNDM), Genetic Algorithm system (GAs), and Optimization method. In order to extract a general diagnosis for the traffic congestion problem in the main urban areas in Malaysia, and to find out the optimal solutions for transportation system problems in Malaysia. The results of this study used to apply optimal transportation policies with the aim of providing useful insights on critical issues about the impact of such policies, and to help as a guide for the Malaysian decision makers to elaborate the optimal transportation policies.(Khaled, 2016) in this study, a new Artificial Intelligence Techniques (AIT) and Simulation Model (SM) are applied in order to elicit a general diagnosis for the traffic congestion problem in Kuala Lumpur and Kuantan. An integrated model involves a Neural Network (NN), Fuzzy Logic (FL), Genetic Algorithm (GA), and Simulation Model (SM) is used. The current traffic demand data will be captured by strategically placed cameras. By receiving and processing data, they plan to use our integrated model to adjust traffic lights, timing to optimize traffic flow in coordinated traffic light systems, in order to minimize the traffic congestion through controlling traffic lights. The results of this study used to suggest and apply more efficient transportation policies with the aim of providing useful insights on traffic congestion problem, and to assist the Malaysian decision makers to elaborate the best transportation policies.
4. The Proposed Traffic Light Control Module
- The proposed control module will be integrated with our previous work [17] which it presented an intelligent a traffic light monitor module. This monitor module supplies a three street condition of each street in the intersection (i.e. empty, normal and crowded). As well as, an intersections, traffic light map need to be supported to the proposed traffic light control module. Though, the input of the proposed control module should be the intersections, traffic light map in addition to the outcome of the monitoring module. These two inputs will be used by the PSO algorithm to find the optimum set of adjacent streets to assign the green period time to them providing optimal vehicles flow.
4.1. Handling Mechanism of Best Vehicles Flow
- In this method the proposed module will take the flow of vehicles into account. In this method (see algorithm 1), the green period time will be given to the set of streets with optimal flow of vehicles through a set of selected street. This algorithm needs to use an adjustment array to represent streets adjustment. Choosing adjacent set streets mean more vehicles’ flow during the green period time.This method needs to optimize a random selected streets to achieve an optimal set of adjacent streets. These selected streets will be as particle in PSO algorithm. A reward will be given for each pair of adjacent streets in a particle. Thus, the fitness function of the PSO will sum all the given rewards for each particle. As shown in equation (1).
 Where i: i th particle. j: j th offspring for i the particle. Reward: the reward value that should be added to the fitness function. When two streets in the particle are adjacent.
Where i: i th particle. j: j th offspring for i the particle. Reward: the reward value that should be added to the fitness function. When two streets in the particle are adjacent.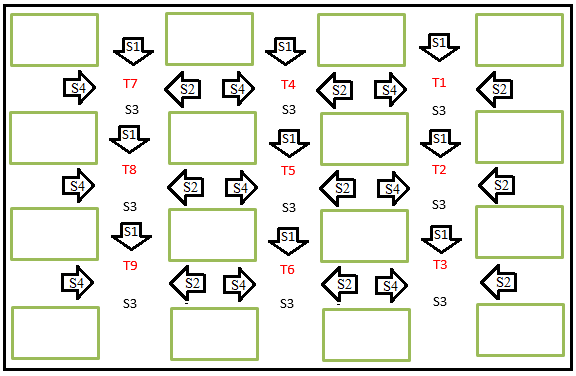 | Figure 1. Example of adjustment street array |
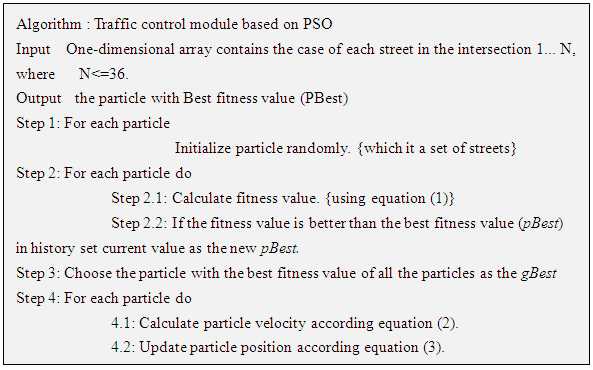
4.2. The Proposed Control Module Algorithm
- The green period time will be given to the optimal series of streets which it the output of the algorithm. PSO is initialized with a group of random particles (solutions) and then searches for optima by updating generations. In every iteration, each particle is updated by following two "best" values. The first one is the best solution (fitness) it has achieved so far. (The fitness value is also stored.) This value is called pbest. Another "best" value that is tracked by the particle swarm optimizer is the best value, obtained so far by any particle in the population. This best value is a global best and called gbest. When a particle takes part of the population as its topological neighbors, the best value is a local best and is called lbest. After finding the two best values, the particle updates its velocity and positions with the following equation (2) and (3).
 | (2) |
 | (3) |
5. Result and Analysis
- The proposed control module has been evaluated using different number of traffic light and streets.
5.1. One Traffic Light Cycle
- This test has been guided by three scenarios. For each scenario, there are different number of traffic light and streets, the results have been taken for one cycle without taking time into account.
5.1.1. Scenario No. 1
- In this scenario, 9 Traffic lights and 36 streets have been considered. Figure (2) shows that the proposed controller has been improved the flow ratio of the vehicles through 9 traffic light has been improved. This improvement can be found by increasing the number of adjacent streets to more than 98%. This improvement has been increased as soon as the number of PSO iterations is increased. The saturation phenomenon has been reached when the number of iterations increased more than 60 iterations.
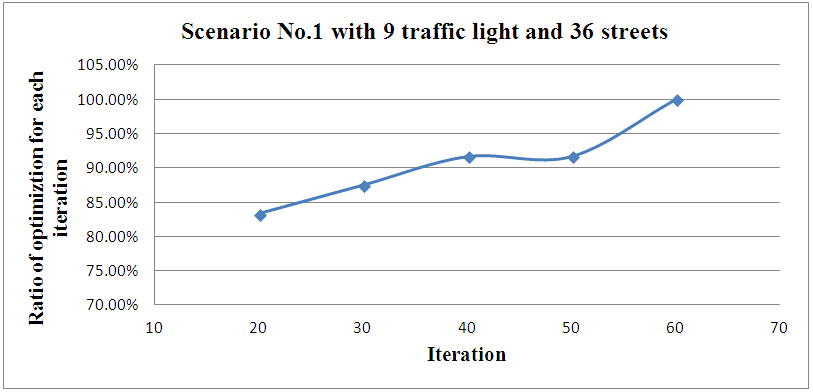 | Figure 2. Scenario No. 1 with 9 Traffic lights and 36 streets |
5.1.2. Scenario No. 2
- In this scenario, 16 Traffic lights and 64 streets have been considered. The same as the previous scenario, Figure (3) shows that the proposed controller has been improved the flow ratio of the vehicles through 16 traffic light intersections has been improved. This improvement can be found by increasing the number of adjacent streets to more than 93%. The saturation phenomenon has been reached when the number of iterations increased more than 70 iterations.
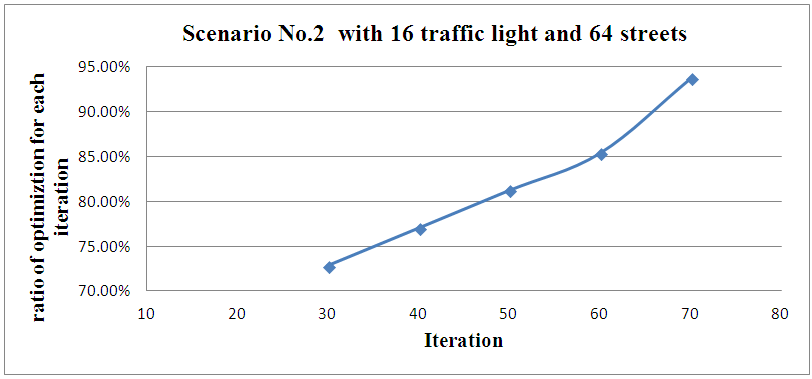 | Figure 3. Scenario No. 2 with 16 Traffic lights and 64 streets |
5.1.3. Scenario No. 3
- In this scenario, 25 Traffic lights and 100 streets have been considered. Figure (4) shows that the proposed controller has been improved the flow ratio of the vehicles through 25 traffic light has been improved. This improvement can be found by increasing the number of adjacent streets to more than 85%. This improvement can be found by increasing the number of adjacent streets. The saturation phenomenon has been reached when the number of iterations increased more than 80 iterations.
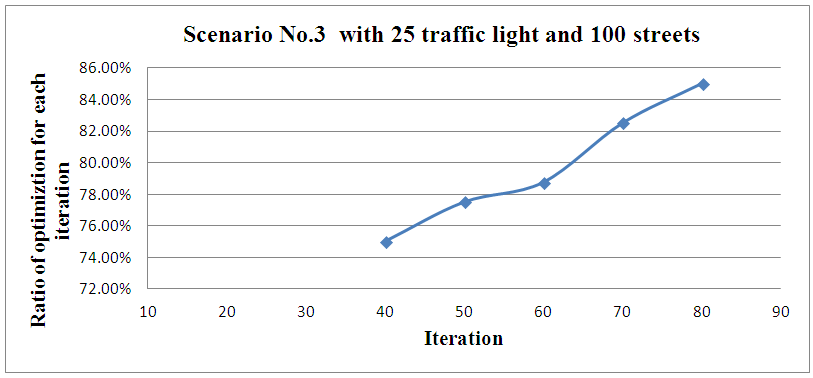 | Figure 4. Scenario No. 3 with 25 Traffic lights and 100 streets |
5.2. More than one Cycle Test
- In this test the proposed control module should be configured the traffic light intersections all the time with more than one cycle. This means, the proposed control module should be reconfigured the traffic light intersections according to the shortest green period time in the previous streets sequence.The selection of the best cycle time considers the volume, intersection configuration, approach speeds and coordination with nearby intersections. Thus, typical cycle times - 30s to 120s. On the other hand, the cycle time should be as short as possible in off-peak periods 40s - 60s. While Cycle times of 120s - 150s are often required in peak periods in urban areas [18].Three types of tests have been presented according to the previous mentioned: first test will be taking during typical cycle times, the second will be during off-peak periods and the third test will be during peak periods in urban area using the same scenarios which are presented previously in the section 5.1.
5.2.1. Typical Cycle Times
- In this test the shortest cycle should be 30s. This means, the proposed controller module should be reconfigured the traffic light intersections each 30s. For scenario 1, figure (5) shows that the controller module needs just 5.9s to improve the flow of the vehicles to more than 98% through 9 traffic and 36 streets. This improvement can be found by increasing the number of adjacent streets.
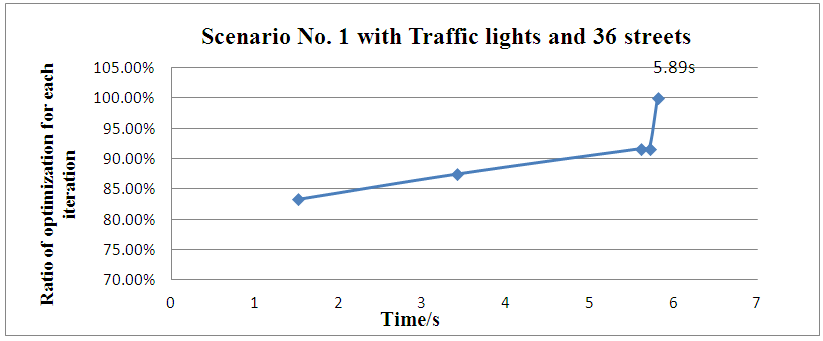 | Figure 5. Scenario No. 1 with 9 Traffic lights and 36 streets |
 | Figure 6. Scenario No. 2 with 16 Traffic lights and 64 streets |
 | Figure 7. Scenario No. 3 with 25 Traffic lights and 100 streets |
5.2.2. Off-peak Periods Time
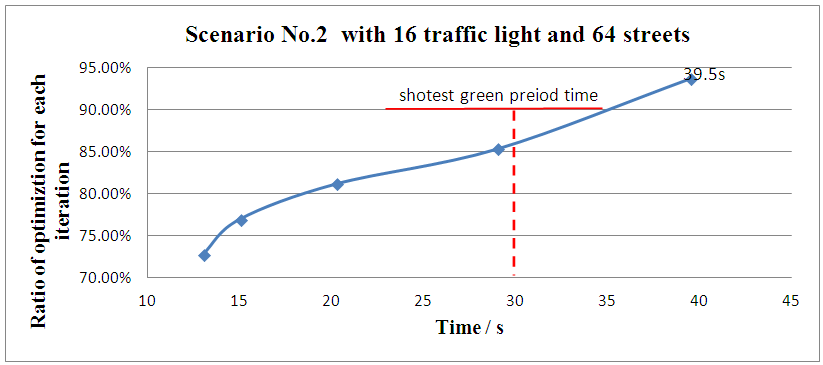
- In this test the shortest cycle should be 40s. This means, the proposed controller module should be reconfigured the traffic light intersections each 40s. For scenario 1, just like previous test, the controller module needs just 5.9s to improve the flow of the vehicles to more than 98% through 9 traffic and 36 streets (see figure 5). For scenario 2, (figure 8) shows that the controller module can improve the flow of vehicles to more than 93% through 16 traffic lights and 64 streets. This improvement can be found by increasing the number of adjacent streets.
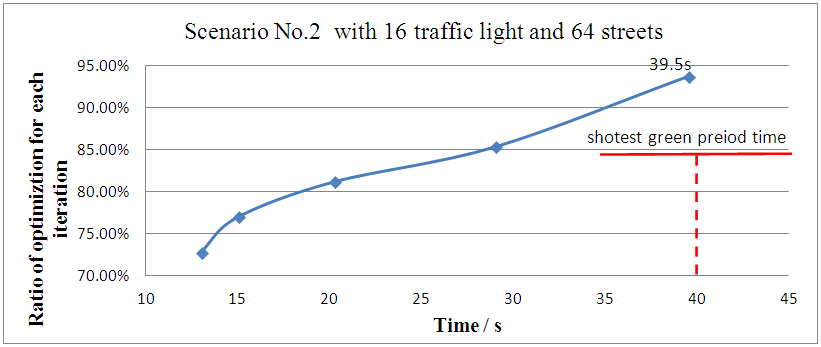 | Figure 8. Scenario No. 2 with 16 Traffic lights and 64 streets |
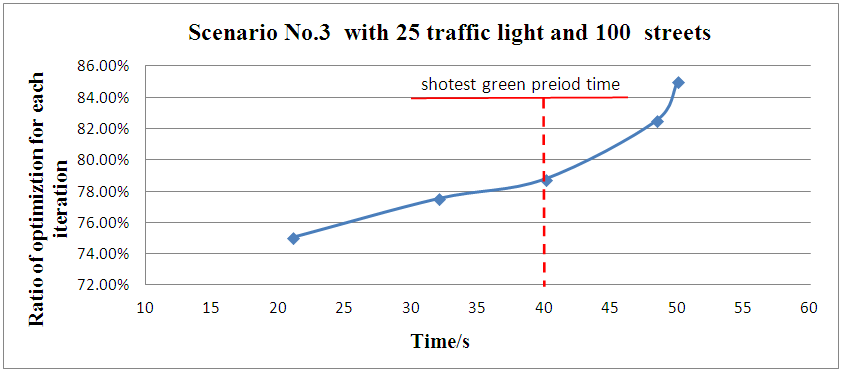 | Figure 9. Scenario No. 3 with 25 Traffic lights and 100 streets |
5.2.3. Peak Periods Time
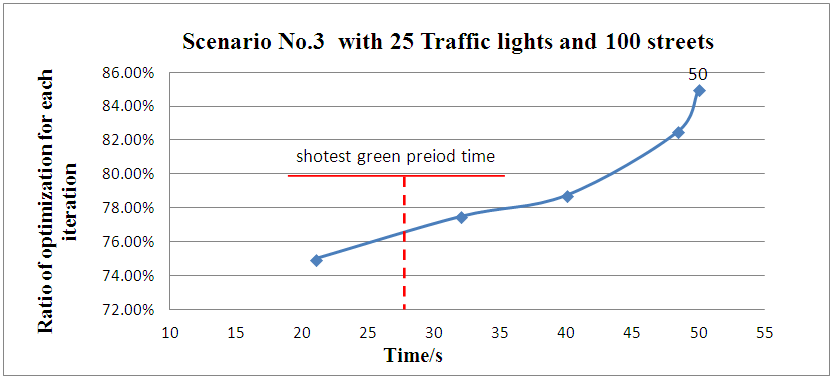
- In this test the shortest cycle should be 120s. This means, the proposed controller module should be reconfigured the traffic light intersections each 120s. For scenario 1 and 2, just like previous test, the controller module needs just 5.9s and 39s to improve the flow of the vehicles to more than 96% (see figure 8 and 9). This improvement can be found by increasing the number of adjacent streets. For scenario 3, just like the other two scenarios, the controller module can improve the flow of vehicles to more than 85% (see figure (10)) because the controller module needs just to 50s for improving. This improvement can be found by increasing the number of adjacent streets.
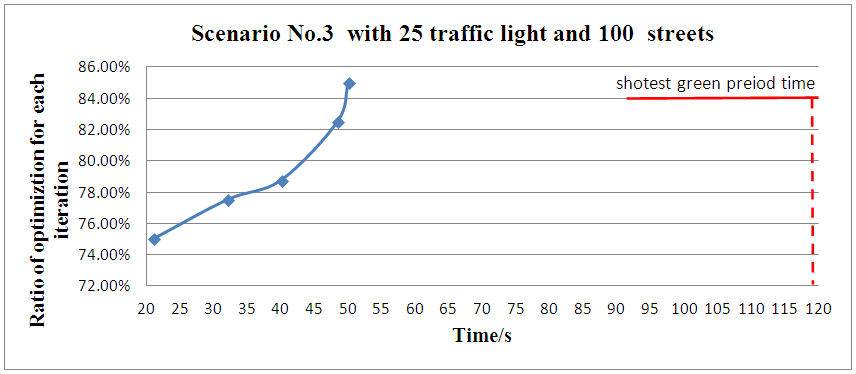 | Figure 10. Scenario No. 3 with 25 Traffic lights and 100 streets |
6. Proposed Module Complexity
- The proposed module complexity depends on the number of computations required for a complete run of the PSO algorithm which are the sum of the computations required to calculate the cost of a candidate solution (based on current position of the particles) and the computations required to update each particle’s position and velocity. Both of these are directly proportional to the number of iterations.
7. Conclusions
- This research presents an intelligent control module. The proposed control module has been developed based on swarm technique. The proposed control module developed to optimize the traffic light configuration of a set of urban area’s intersections. The results have been shown its ability to select one street from each traffic light according to each street condition in the intersection. The street condition should be offered from the monitor module which it integrated with the proposed control module. The green period time has been given to these selected streets to achieve the optimal vehicles flow through the traffic light’s intersections. Its ability has been proven via three scenarios. These scenarios have been established by different number of traffic lights and streets. PSO improved the traffic flow through these traffic lights with ratio more than 96% for both scenarios 1 and 2 however, in scenario 3 the improvement was more than 95%. PSO needs from 80 to 90 iterations to reach the optimal series of streets. The results show that the proposed control module can be more efficient with peak periods because the traffic light cycle is relatively longer than the processing time that the proposed control module needs. Thus, the proposed control module is efficient as soon as the traffic light cycle is longer than PSO processing time.