-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
American Journal of Intelligent Systems
p-ISSN: 2165-8978 e-ISSN: 2165-8994
2017; 7(4): 113-119
doi:10.5923/j.ajis.20170704.02

Hybrid Communication Based Surveillance Quadcopter UAV (NetQuadcopter)
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLEmmanuel O. Okorie, Nachamada V. Blamah
Department of Computer Science, University of Jos, Jos, Nigeria
Correspondence to: Nachamada V. Blamah, Department of Computer Science, University of Jos, Jos, Nigeria.
| Email: |  |
Copyright © 2017 Scientific & Academic Publishing. All Rights Reserved.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

The concept of the design for the hybrid communication based surveillance quadcopter UAV (Netquadcopter) in this research is centered on the use of Netquadcopter to survey areas which normally would be difficult and dangerous for human beings to ply. It also aids communication between the control station and a base station severing as a medium of communication in areas where there is limited telecommunication network. It uses a combination of PID algorithm for flight control, and logistic model for mathematical modeling of SMS delivery, with X configuration. It consists of wireless communication system that transmits sensor values from the Netqaudcopter to a computer (control station), showing in real time activities and state of the Netquadcopter. The Netquadcopter built in this research achieved remarkable results using minimal and affordable components with significant evidence that full industrial production and deployment of communication-based surveillance quadcopters can go a long way to aid the surveillance and security of territories of interest.
Keywords: Surveillance, Communication, Quadcopter, Netquadcopter, GSM, Mathematical modeling, GUI
Cite this paper: Emmanuel O. Okorie, Nachamada V. Blamah, Hybrid Communication Based Surveillance Quadcopter UAV (NetQuadcopter), American Journal of Intelligent Systems, Vol. 7 No. 4, 2017, pp. 113-119. doi: 10.5923/j.ajis.20170704.02.
Article Outline
1. Introduction
- A Quad-copter is a multi-rotor aerial and vertical take-off and landing vehicle. It is an aircraft that is lifted and propelled by four rotors. Quadcopter is classified as rotorcraft, as opposed to fixed-wing aircraft, because its lift is derived from four rotors [1]. A quadcopter is an aircraft propelled by four motors. This type of vehicle fits in the Vertical Take Off and Vertical Landing (VTOL) category as they can successfully perform vertical take offs, landings and hovering despite being heavier than air [2].The idea of a vehicle that could lift itself vertically from ground was probably born at the same time that man first dreamed of flying. The first indication of this idea can be found in Chinese tops, a toy first used around 400 B.C, Assuming its inspiration came from the seeds of the sycamore tree, the toy consist of feathers at the top of the stick, which was rapidly spun to produce lift and then released into free flight. Although rotorcraft can trace their roots back thousands of years and often captivated the minds of the men like Leonardo Da Vinci, it wasn't until recently that advances in rotary aircraft were made [3].A few attempts to build a Quadcopter in the early 1900's were made, but it they were more of experimental rotar-wing planes and very similar to the concept of a quadcopter. These were called the gyroplane; at the center of were a rectangular-shaped turbine steels to support the pilot and the engine and from that center four arms were projected, which are also made from steel. At their end were a 4-blade biplane rotor. Two sets of these rotors would rotate clockwise and the other two would rotate counter clockwise in order to generate a balance torque around the frame making the aircraft vertically take off. The power plant of the gyroplane was Antionette piston engine rated at 40-hp and the weight of the aircraft was about 500kg without the pilot. But their experimental aircraft didn't flew and wasn't steerable nor controllable by any means [4].Communications technologies play very important role in the society and provide individuals the ability to carry out tasks and to communicate with ease. Not only is communication highly essential for effective aerial surveillance of territories for the purpose of security, but it is also a critical issue in all aspects of human interaction, which is one of the major contributing factors for either the success or failures in aviation. Since the essence of surveillance is to have available territorial information, any surveillance that lacks effective communication mechanism is a mere tour of the environment. Communications that are related to surveillance are normally in the form of audio, visual, or text, depending on the gadgets that are installed on the vehicles. In this research, we emphasize on effective communication mechanisms for aerial surveillance.
2. A Review of Quadcopter
- Despite the examples from 1900s, there have been much several researches done in the area of helicopters with four rotors. In fact, it was only within the past few years that aerospace researchers once again increased their interest in the subject. However many tilt rotors have utilized a four-rotor design. A prominent example of this is the Bell Boeing Quad Tiltrotor, which is currently being jointly developed by Bell helicopter and Boeing.At the beginning of the 1980's, quadcopter have been getting a lot of attention as alternatives for mini UAV applications, together with the introduction of smart electronics, more research and development have been conducted in that area. The Draganflyer X4 is an impressive commercial Quadcopter, yet also suitable for government and military usages. The frame is made from carbon fiber and so are the rotors. This quadcopter weighs about 680g and has a payload capacity of 250s. The rotors are driven by brushless direct drive motors, with stall protection as a safety feature. The X4 is packed with a total of seven sensors, 3 gyroscopes, 3 accelerometers, and one barometric pressure sensor [4].The X4 has an intuitive easy-to-use controller, with an OLED touch screen and simple interface, which makes the experience smooth and easy-to-grab for beginners. The mounting for the camera or any capturing device features an anti-vibration design, resulting in a clear, professional shoots and videos. User-friendly software to show basic and advanced real-time information monitoring, including a live stream of the video being captured, is also available [4].Holger Buss and Ingo Busker inspired another Quadcopter project found on www.mikrokopter.de, these two initiated their own project in 2006 and never stopped since, building outstanding aerial platforms suitable for aerial photography, for educational and scientific purposes, and as a hobby for enthusiasts. Their latest aircraft is the Hexakopter featuring six rotors and a flight time up to 36 minutes with a small payload (capable of a maximum of 1kg payload), and it weighs about 1.2kg without the camera [4].A lot of other researches have been published recently relating to quadcopter, including Experimental Study of Quadcopter Acoustics and Performance at Static Thrust Conditions [5], Design and Implementation of a Real Time Wireless Quadcopter for Rescue Operations [6] at the Federal university of technology Owerri, Geometric Stabilization of a Quadrotor UAV with a Payload Connected by Flexible Cable [7], Quadcopter control in three-dimensional space using a noninvasive motor imagery-based brain–computer interface [3]. Others are The Design and Construction of a High Endurance Hexacopter suited for Narrow Corridors [8], Simple GUI Wireless Controller of Quadcopter [9], Design of Quadcopter in Reconnaissance [10], Obstacle Detection And Collision Avoidance Using Ultrasonic Distance Sensors For An Autonomous Quadrocopter [11], Quadcopter formation flight control combining MPC and robust feedback linearization [12], Quadcopter flight control using a low-cost hybrid interface with EEG-based classification and eye tracking [13], Mathematical Modelling and Parameter Identification of Quadrotor [14], Use of LIDAR for Obstacle Avoidance by an Autonomous Aerial Vehicle [15], Attitude Stabilization Control of a Quadrotor UAV by Using Backstepping Approach [16], and Real Time Obstacle Avoidance And Navigation Of A Quad-Rotor Mav Using Optical Flow Algorithms [17]. In all the aforementioned researches, no emphases were made regarding efficient communications using simple methods like the SMS.
3. Methodology
- Netquadcopter is controlled by RC and requires the following components: a frame, motors (rotors) with propellers, electronic speed controllers (ESC), a power supply, a radio receiver and transmitter, a flight controller (Arduino mega), a transceiver, GSM shield and Inertial measuring unit (IMU).The methodology will be presented by discussing the Basic Concept of Netquadcopter, SMS communication, SMS Mathematical Model for Netquadcopter, Live video streaming and the Wireless streaming of the IMU sensor readings.
3.1. The Basic Concept of Netquadcopter
- The schematic diagram for the Netquadcopter is presented in Fig. 1. The basic concept is described thus:
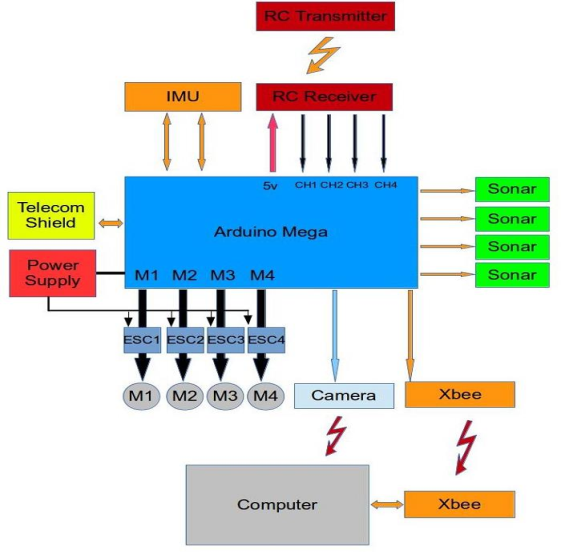 | Figure 1. Netquadcopter Schematic diagram |
3.2. SMS Communication
- To ensure message is sent from the control station to a base station (third party) and also for a base station (third party) to be able to reply a message, a GSM shield was used. A message is sent from the computer (control station) via an Xbee to the Netquadcopter which in turn delivers the message to the recipient. When the third party wants to reply or send a message to the control station, the message is sent using a mobile phone.
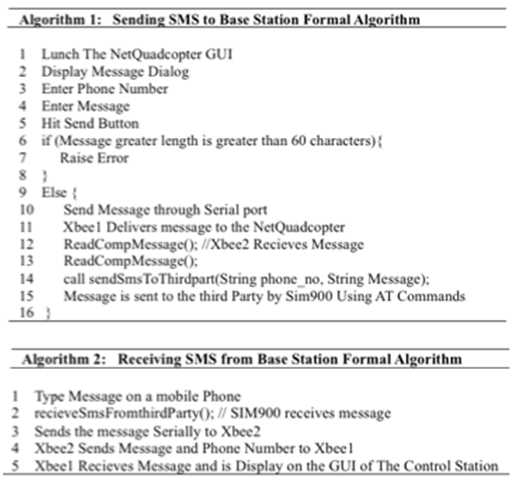 This message is received by the Netquadcopter and is delivered to the control station through the Xbee. Algorithms 1 and 2 describe the modules responsible for sending SMS to Base Station and receiving SMS from Base Station respectively.
This message is received by the Netquadcopter and is delivered to the control station through the Xbee. Algorithms 1 and 2 describe the modules responsible for sending SMS to Base Station and receiving SMS from Base Station respectively.3.3. SMS Mathematical Model for Netquadcopter
- The schematic diagram for the SMS mathematical model for the Netquadcopter is presented in Fig. 2.
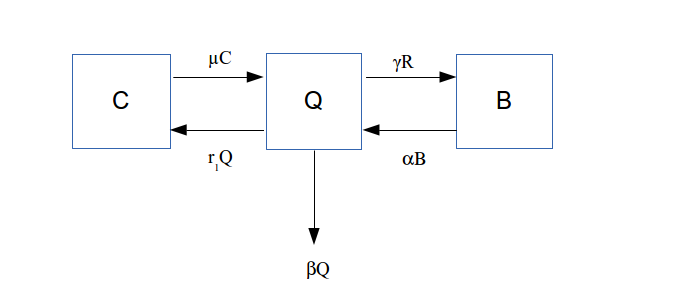 | Figure 2. Schematic of SMS model |
 rate at which Message is sent from Netquadcopter to base stationα = rate of feedback Message sent from Base station to Netquadcopterβ = Message Lost or partially delivered to the Control Station.If Message is sent more or less continuously from the Control station via Netquadcoper to the base Station, then the rate of delivery is represented by
rate at which Message is sent from Netquadcopter to base stationα = rate of feedback Message sent from Base station to Netquadcopterβ = Message Lost or partially delivered to the Control Station.If Message is sent more or less continuously from the Control station via Netquadcoper to the base Station, then the rate of delivery is represented by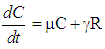 | (1) |
 | (2) |
 Considering the rate of SMS failure tending to 0 and by including the model with a form factor of
Considering the rate of SMS failure tending to 0 and by including the model with a form factor of when C is much smaller than K, and which is close to 0 when C is close to K, the resulting model in equation (3) is called SMS Mathematical Model for Netquadcopter,where K = maximum message that can be sent andr = rate of production of Message.
when C is much smaller than K, and which is close to 0 when C is close to K, the resulting model in equation (3) is called SMS Mathematical Model for Netquadcopter,where K = maximum message that can be sent andr = rate of production of Message. | (3) |
3.4. Live Video Streaming
- SJ4000 camera was used in this research for live streaming of events as the Netquadcopter navigates. SJ4000 uses real time streaming protocol to stream videos. The Wi-Fi capability of the camera was utilized and video was captured using Html5 and then embedded into PyQt framework using webkit. This method was only used to play and pause the video streams; to record the live stream video, a third party software kazam (Ubuntu operating system) was used to capture the screen of the GUI (control station computer) and as the camera was streaming, Kazam recorded the streams and saved it for further processing.
3.5. Wireless Streaming of the IMU Sensor Readings
- IMU sensor was used to balance the netquadcopter. This sensor has gyroscopes, accelerometer, magnetometer (compass) and a barometer in it. The 3 axis value of the gyroscope, accelerometer, magnetometer and barometer was sent via a wireless medium to the base station computer and these values were plotted live on the GUI.
4. Implementation and Results
- The implementation of Netquadcopter was achieved using two programming languages, namely C/C++ and python. C/C++ was used to develop the source code that runs on the Arduino Mega (Netquadcopter) while python programming language was used to develop the GUI. PyQt python desktop development framework was used because of its robustness, availability of libraries as well large support and availability of resources online.The remainder of this section will be presented by discussing how the system carries the wireless camera, receives SMS from the computer (control station) and sends to the base station, and receives SMS from base station (third party) and sends to the computer (control station). Other issues also discussed include how the Netquadcopter GUI typing and editing of message is done, video streaming, and Plotting of the sensor values.
4.1. Carrying the Wireless Camera
- The Netquadcopter carries the Wireless camera as it travel, thereby making it possible for video capturing of the environment as the Netquadcopter travels, as presented in Fig. 3.
 | Figure 3. Front view Netquadcopter |
4.2. Receiving SMS from the Computer (Control Station) and Sending to the Base Station
- To send message to a Base Station, the message that is constructed on the GUI of the Netquadcopter is received by the Xbee on the Netquadcopter and the GSM shield sends the message to the control Station. The message is received on a mobile phone. An interface for the inbox message is displayed in Fig. 4.
4.3. Receiving SMS from Base Station (Third Party) and Sending to the Computer (Control Station)
- Receiving message from base station (third party) is done using a mobile phone. A message is sent to the Netquadcopter, the GSM shield picks up the message, and the message is sent to the base station (computer) via a wireless medium and the message is displayed on the GUI of the base station computer. This can only be possible if the third party sending a message to Netquadcopter has the mobile number of the Netquadcopter. An interface for the inbox message is displayed in Fig. 4.
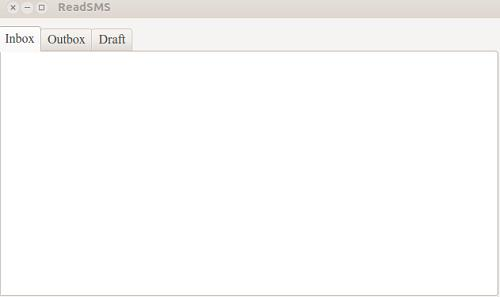 | Figure 4. Inbox Message |
4.4. Netquadcopter GUI Typing and Editing of Message
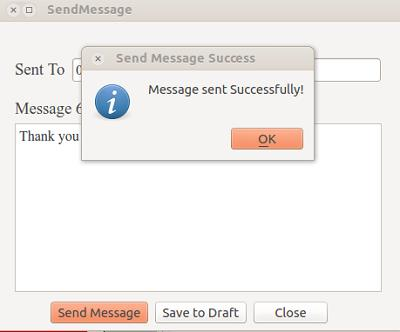
- Typing and Editing of messages are done on the GUI. Clicking the send message button pops up the send message dialog box. This box has field for entering the recipient phone number as well as the field for the message. The fields only allow 60 characters. Once the phone number and message are entered and the send button is clicked, the phone number and the Message is sent serially from the Xbee attached to the computer to the Xbee connected to the Netquadcopter. The Xbee picks the phone number and the message is sent to the GSM shield which in turn sends this message to the phone number.Fig. 5 Shows the dialog box for composing SMS with message and phone number, and Fig. 6 displays the dialog box for composing SMS with message delivery status. A sample of what the outbox contains is displayed in Fig. 7.
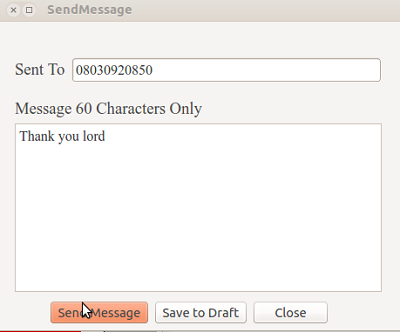 | Figure 5. SMS compose dialog box with Message and Phone Number |
 | Figure 6. SMS compose dialog box with Message delivery status |
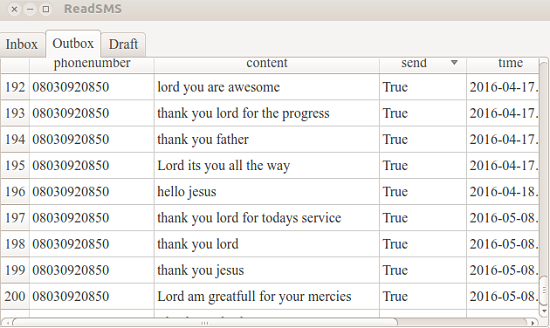 | Figure 7. SMS Outbox dialog box |
4.5. Video Streaming
- SJ4000 camera was used in this research for live streaming of events as the Netquadcopter navigates. The Wifi of the camera must be turned on and the Computer (ground station) must be connected to the network. For security purpose, the Wi-Fi of the camera was passworded. Therefore, anyone who does not have the password cannot connect to network or view the video stream. The video stream of the camera can be saved in two ways. First the video stream can be saved on a memory card slotted into the memory card slot of the camera, and secondly the live stream of the video is captured on the GUI and is recorded using Kazam. The GUI enables the playing and pausing of video streams. Fig. 8 displays a typical camera stream.
 | Figure 8. Camera Stream |
4.6. Plotting of the Sensor Values
- The Xbee connected to the computer (control station) picks up these values and sends it serially to the Computer. The values are then streamed on the GUI using a python library called Matplotlib. The GUI plots the values of Roll, Pitch, Yaw, Accelerometer x, y, z axis, the gyroscopes x, y, z axis and magnetometer x, y, z axis.Fig. 9 shows a live streaming of the accelerometer, with the values of the z-axis above the value of 15000, and both the x and y axes were below the value of 0. The live streaming values of the gyroscope are displayed in Fig. 10. In this figure, it is noticed that both the x and y axes rates were consistently above the values of the z axis with the passage of time.
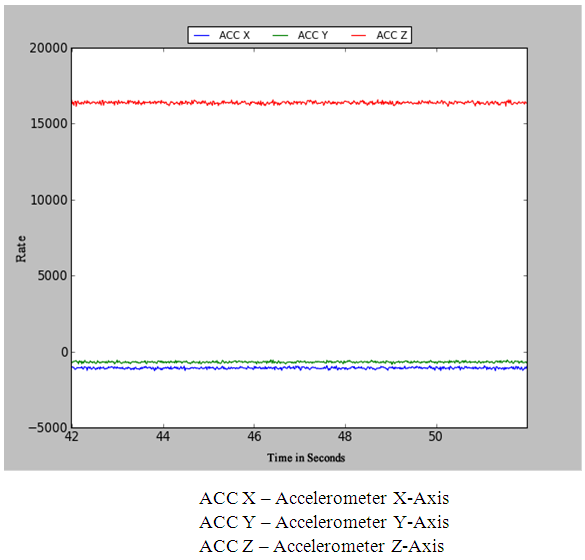 | Figure 9. Live streaming of Accelerometer |
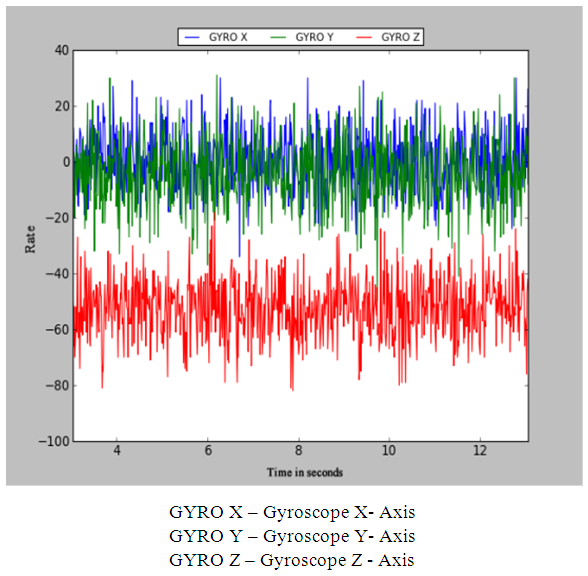 | Figure 10. Live streaming of Gyroscope |
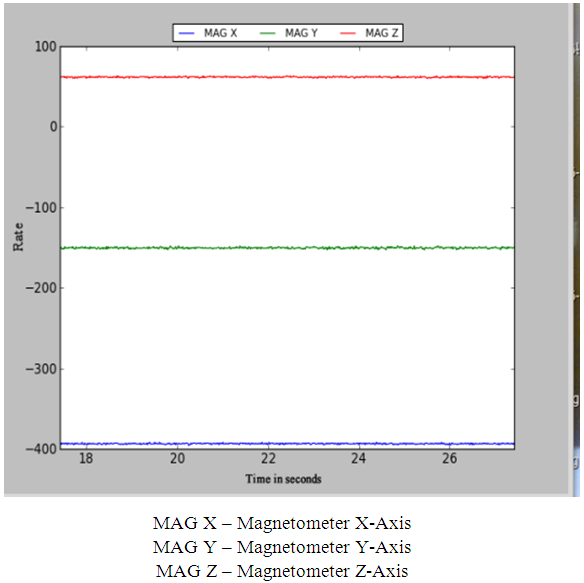 | Figure 11. Live streaming of Magnetometer |
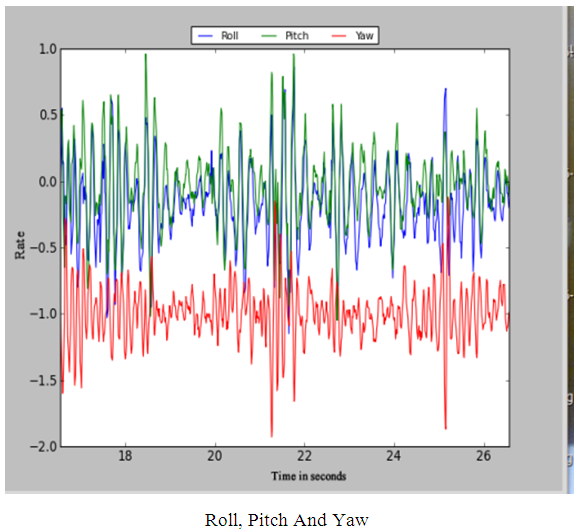 | Figure 12. Live streaming of Roll, Pitch & Yaw |
5. Recommendations & Future Work
- In the future, attempt should be made to implement the following1. A stronger micro-controller with other inbuilt facilitates should be used, Raspberry pie for instance have inbuilt camera facilities, wifi capabilities and other facilities that can make it a lot easier for a developer.2. GPS can be used to track the Netquadcopter on a map as it travels and also to send the coordinates of a particular position.3. This paper did not consider what the Netquadcopter should do when it loses signal from the RC controller. Future work can take a look on how to provide alternative for the Netquadcopter when it loses signal with the RC (control station).4. GPRS can be used to send the IMU values instead of using Xbee; with this, the IMU value can be sent and received over a long range and distance, unlike the Xbee that can only go few miles.5. The GUI can further be developed to display received messages from the base station (third party).6. The strength or availability of telecommunication network can be displayed on the GUI.7. Instead of using SMS as a communication media, the use of voice can also be worked on.
6. Conclusions
- Netquadcopter can be used for several purposes, and a lot of scientific research can still be done in this field despite the ongoing research. The use of quadcopter for surveillance and security device is also a development that can be used to protect the life and properties of citizens so as to limit the rate of exposure of military personnel to insurgence and also to aid communication in area with little or limited telecommunication network. The model developed in this research has significantly proven that full industrial production and deployment of communication-based surveillance quadcopters can go a long way to aid the surveillance and security of territories of interest.