-
Paper Information
- Previous Paper
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
American Journal of Intelligent Systems
p-ISSN: 2165-8978 e-ISSN: 2165-8994
2012; 2(7): 191-199
doi: 10.5923/j.ajis.20120207.06
Robust Adaptive Fuzzy Control of Uncertain Nonlinear Systems with Unknown Dead-Zone
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-Text HTML
Full-Text HTMLChiang-Cheng Chiang
Department of Electrical Engineering, Tatung University, 40 Chung Shan North Road, Sec.3, Taipei, Taiwan, Republic of China
Correspondence to: Chiang-Cheng Chiang, Department of Electrical Engineering, Tatung University, 40 Chung Shan North Road, Sec.3, Taipei, Taiwan, Republic of China.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
This paper presents a robust adaptive fuzzy control scheme for a class of uncertain nonlinear systems containing an unknown dead-zone. Dead-zone characteristics are quite commonly encountered in actuators, such as hydraulic and pneumatic valves, electric servomotors, and electronic circuits, etc. Therefore, by using a description of a dead-zone and by exploring the properties of this dead-zone model intuitively and mathematically, a robust adaptive fuzzy control method is presented without constructing the dead-zone inverse. The unknown nonlinear functions of the controlled system are approximated by the fuzzy logic system according to some adaptive laws. By means of Lyapunov stability theorem, the proposed robust adaptive fuzzy control scheme can guarantee the robust stability of the whole closed-loop system with an unknown dead-zone in the actuator and obtain good tracking performance as well. Finally, an example and simulation results are illustrated to demonstrate the validity of the proposed method.
Keywords: Lyapunov Stability Theorem, Nonlinear Systems, Dead-Zone, Fuzzy Logical System, Robust Adaptive Control
Cite this paper: Chiang-Cheng Chiang, "Robust Adaptive Fuzzy Control of Uncertain Nonlinear Systems with Unknown Dead-Zone", American Journal of Intelligent Systems, Vol. 2 No. 7, 2012, pp. 191-199. doi: 10.5923/j.ajis.20120207.06.
Article Outline
1. Introduction
- Generally, many practical control systems have the structure of a dynamical system preceded by some nonsmooth nonlinearities in the actuator, such as dead-zone, backlash, saturation, etc[1-3]. Furthermore, these nonsmooth nonlinearities in such actuators give rise to undesirable inaccuracy or oscillations or even lead to instability, whose parameters are often unknown and may vary with time. Thus, the study of dead-zone is particularly important when the expected accuracy of the dynamical system is high, and the control problem of these nonsmooth nonlinearities has attracted considerable attention of a number of researchers over the past years[4-6]. In the controller design of nonlinear systems, the feedback linearization methods have been widely studied and developed, and these methods can be utilized to transform a nonlinear dynamic system into a linear system by means of state feedback approach[7-8]. However, these methods can only be applied to nonlinear systems whose dynamics must be exactly known. If there exist uncertainties in those nonlinear terms, or the nonlinear terms are completely unknown, it is difficult to achieve the exact feedback linearization such that the nonlinear control systems have poor performance. In this study, we intend to apply adaptive fuzzy modeling control schemes to deal with the unknown uncertain nonlinear systems preceded by an unknown dead-zone.Fuzzy logic control has recently found extensive applications for systems that are complex and ill-defined. Based on the universal approximation theorem, several stable adaptive fuzzy control schemes[9-14] have been developed to overcome the difficulty of extracting linguistic control rules from experts and to cope with the system parameter changes. An adaptive fuzzy system is a fuzzy logic system equipped with an adaptation algorithm to be able to update the fuzzy system parameters[15-16], and the fuzzy logic system is constructed from a collection of fuzzy IF-THEN rules. According to the definition in[15], the adaptive fuzzy approaches can be classified as: direct adaptive fuzzy control and indirect adaptive fuzzy control. The direct adaptive fuzzy control scheme uses fuzzy systems to describe the control action, and the parameters of the fuzzy system are adjusted directly to satisfy the required control objective[10, 12, 19]. In contrast with the direct adaptive fuzzy control scheme, an indirect adaptive fuzzy control scheme uses fuzzy systems to estimate the plant dynamics, and a suitable controller is developed for the estimated system[9-10, 13, 17-18]. In this study, due to the nonlinearity of dead zone and uncertainties, the indirect adaptive fuzzy control scheme is adopted to tackle the control problem of these nonlinear systems.Variable structure control (VSC) has been studied extensively and received many applications in recent years. It has been shown that variable structure control possesses several advantages, such as fast response, robustness of stability, insensitivity to the matching parameters variations, and external disturbances[22-24]. Sliding mode control (SMC) methods can be considered as a synthesis procedure, which is often associated with the theory of variable structure control (VSC). Sliding mode control (SMC) design technique presents simple control laws which constrain the system motion on suitably chosen manifolds. However, when the dynamics of controlled system are in the switching hyperplane, a switching function must be used in the control law, which causes chattering of the control signals. Chattering is the main drawback of SMC, which can excite undesirable high-frequency dynamics. In order to reduce chattering phenomenon, a small boundary layer[25-26] is introduced around the sliding surface for better control accuracy.In this paper, in order to eliminate the effects arising from the dead-zone input nonlinearity, a robust adaptive fuzzy control scheme is proposed to overcome the stabilization problem of a class of uncertain nonlinear systems preceded by an unknown dead-zone. In the previous works[27-29], a common feature is the construction of an inverse dead-zone nonlinearity to minimize the effects of dead-zone. But, unlike the aforementioned method, by using a description of a dead-zone and exploring the properties of this dead-zone model intuitively and mathematically, a robust adaptive fuzzy control method is presented without constructing the dead-zone inverse. Finally, based on the Lyapunov stability theorem and the theory of variable structure control, the proposed robust adaptive fuzzy control scheme can guarantee the robust stability of the whole closed-loop system with an unknown dead-zone in the actuator and obtain good tracking performance as well.The remainder of this paper is organized as follows. In Section 2, the problem formulation is presented, and a detailed description of fuzzy logic systems and fuzzy basis functions is reviewed. Section 3 introduces robust adaptive fuzzy modeling control scheme to deal with the robust control problem for a class of uncertain nonlinear systems with an unknown dead-zone. Moreover, the robust stability condition will be derived by means of the Lyapunov approach. The simulation results are illustrated in Section 4 to show the effectiveness of the proposed robust adaptive fuzzy controller. Finally, a conclusion is given in Section 5.
2. Problem Formulation and Preliminaries
2.1. Problem Statement
- Consider a class of the following uncertain nonlinear system with an unknown dead-zone of the form
 | (1) |
 | (2) |
 is the system state vector which is assumed to be available for measurement,
is the system state vector which is assumed to be available for measurement,  and
and  are the input and output of the system, respectively,
are the input and output of the system, respectively,  and
and  are unknown nonlinear functions and
are unknown nonlinear functions and  is the unknown uncertainty. Without loss of generality, it is assumed that the sign of
is the unknown uncertainty. Without loss of generality, it is assumed that the sign of  is positive, and
is positive, and  , where
, where  is an unknown continuous function and can be estimated by an adaptive law in the latter.
is an unknown continuous function and can be estimated by an adaptive law in the latter.  is the nonlinear input function containing a dead-zone.To clarify the dead-zone nonlinear input function
is the nonlinear input function containing a dead-zone.To clarify the dead-zone nonlinear input function  , the dead-zone with input
, the dead-zone with input  and output
and output  , as shown in Fig. 1, is described by
, as shown in Fig. 1, is described by | (3) |
 ,
,  and
and  ,
,  are parameters and slopes of the dead-zone, respectively. In order to investigate the key features of the dead-zone in the control problems, we have the following assumptions:
are parameters and slopes of the dead-zone, respectively. In order to investigate the key features of the dead-zone in the control problems, we have the following assumptions: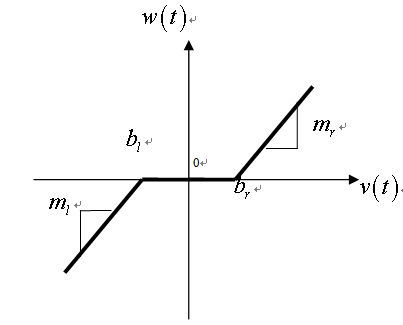 | Figure 1. Dead-zone model |
 is not available.Assumption 2: The dead-zone slopes are same, i.e.
is not available.Assumption 2: The dead-zone slopes are same, i.e.  .Assumption 3: There exist known constants
.Assumption 3: There exist known constants  ,
,  ,
,  ,
,  ,
,  ,
,  such that the unknown dead-zone parameters
such that the unknown dead-zone parameters  ,
,  , and
, and  are bounded, i.e.
are bounded, i.e.  ,
,  , and
, and  .Based on the above assumptions, the expression (3) can be represented as
.Based on the above assumptions, the expression (3) can be represented as | (4) |
 can be calculated from (3) and (4) as
can be calculated from (3) and (4) as | (5) |
 is bounded, and satisfies
is bounded, and satisfies , where
, where  is the upper-bound, which can be chosen as
is the upper-bound, which can be chosen as | (6) |
 is a negative value.Let
is a negative value.Let  be a given bounded reference signal and contain finite derivatives up to the nth order. Define the tracking error
be a given bounded reference signal and contain finite derivatives up to the nth order. Define the tracking error | (7) |
 and
and  . The control objective of this paper is to design a control law
. The control objective of this paper is to design a control law  such that
such that  can follow a given desired reference signal
can follow a given desired reference signal  , under the constraint that all signals involved must be bounded.
, under the constraint that all signals involved must be bounded.2.2. Description of Fuzzy Logic Systems
- Fig. 2 shows the basic configuration of the fuzzy logic system which consists of four main components: fuzzy rule base, fuzzy inference engine, fuzzifer and defuzzifer[15-16]. The fuzzy logic system performs a mapping from
 to
to  . Let
. Let  where
where  ,
,  . The fuzzifer maps a crisp point in
. The fuzzifer maps a crisp point in  into a fuzzy set in
into a fuzzy set in  . The fuzzy rule base consists of a collection of fuzzy IF-THEN rules:
. The fuzzy rule base consists of a collection of fuzzy IF-THEN rules: | (8) |
 and
and  are the input and output of the fuzzy logic system,
are the input and output of the fuzzy logic system,  and
and  are fuzzy sets in
are fuzzy sets in  and
and  , respectively. The fuzzy inference engine performs a mapping from fuzzy sets in
, respectively. The fuzzy inference engine performs a mapping from fuzzy sets in  to fuzzy sets in
to fuzzy sets in  , based upon the fuzzy IF-THEN rules in the fuzzy rule base and the compositional rule of inference. The defuzzifier maps a fuzzy set in
, based upon the fuzzy IF-THEN rules in the fuzzy rule base and the compositional rule of inference. The defuzzifier maps a fuzzy set in  to a crisp point in
to a crisp point in  .The fuzzy systems with center-average defuzzifer, product inference and singleton fuzzifier are of the following form:
.The fuzzy systems with center-average defuzzifer, product inference and singleton fuzzifier are of the following form: | (9) |
 is the point at which fuzzy membership function
is the point at which fuzzy membership function  achieves its maximum value, and we assume that
achieves its maximum value, and we assume that  . Eq. (9) can be rewritten as
. Eq. (9) can be rewritten as | (10) |
 is a parameter vector, and
is a parameter vector, and  is a regressive vector with the regressor
is a regressive vector with the regressor  , which is defined as fuzzy basis function
, which is defined as fuzzy basis function | (11) |
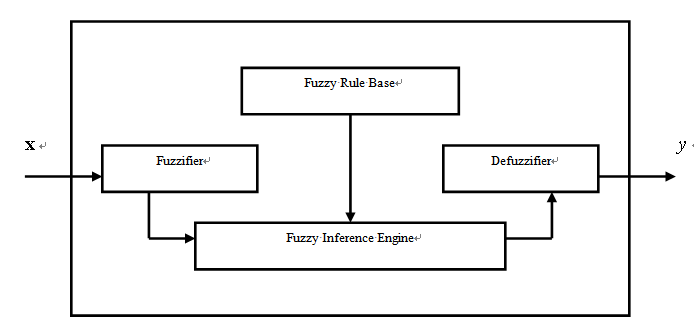 | Figure 2. The basic configuration of fuzzy logic system |
3. Controller Design and Stability Analysis
- In this section, we synthesize the robust adaptive fuzzy controller to deal with the control problem of uncertain nonlinear systems with unknown dead zone. First, let
 | (12) |
 | (13) |
 | , (14) |
 .Let
.Let  be chosen such that all roots of the polynomial
be chosen such that all roots of the polynomial  are in the open left-half plane. If the parameter
are in the open left-half plane. If the parameter  and the functions
and the functions  and
and  are known and the system is free of uncertainty, then control law of the certainty equivalent controller is obtained as
are known and the system is free of uncertainty, then control law of the certainty equivalent controller is obtained as | (15) |
 ,where the main objective of control is
,where the main objective of control is  . However, in (15) some system parameter and functions such as
. However, in (15) some system parameter and functions such as  ,
,  ,and
,and  are unknown, and
are unknown, and  , the control input cannot be determined. In this situation, the approximation by fuzzy logic system can be employed to deal with this tracking control problem.
, the control input cannot be determined. In this situation, the approximation by fuzzy logic system can be employed to deal with this tracking control problem.3.1. Robust Adaptive Fuzzy Control Design
- Consider the tracking error dynamic equation (14) as follow:
 | (16) |
 such that
such that  is Hurwitz, and rewrite (16) as
is Hurwitz, and rewrite (16) as | (17) |
 and
and  and
and  are unknown nonlinear functions and
are unknown nonlinear functions and  is the unknown uncertainty with the unknown upper bound function, i.e.,
is the unknown uncertainty with the unknown upper bound function, i.e.,  | (18) |
 is an unknown smooth positive function and can be estimated by the adaptive law in the later.First, let the nonlinear functions
is an unknown smooth positive function and can be estimated by the adaptive law in the later.First, let the nonlinear functions  ,
,  , and
, and  can be approximated, over a compact set
can be approximated, over a compact set  , by the fuzzy logic systems as follows:
, by the fuzzy logic systems as follows: | (19) |
 | (20) |
 | (21) |
 is the fuzzy basis vector,
is the fuzzy basis vector,  ,
,  , and
, and  are the corresponding adjustable parameter vectors of each fuzzy logic system. Let us define the optimal parameter vectors
are the corresponding adjustable parameter vectors of each fuzzy logic system. Let us define the optimal parameter vectors  ,
,  , and
, and  as follows:
as follows: | (22) |
 | (23) |
 | (24) |
 ,
,  , and
, and  denote the sets of suitable bounds on
denote the sets of suitable bounds on  ,
,  , and
, and  , respectively. Also the parameter estimation errors are defined as
, respectively. Also the parameter estimation errors are defined as ,and
,and | , (25) |
 | (26) |
 | (27) |
 is an estimate of
is an estimate of  , which is defined as
, which is defined as  .Based on the given plant and dead-zone models under the assumptions 1-3, consider the following controller:
.Based on the given plant and dead-zone models under the assumptions 1-3, consider the following controller: | (28) |
 | (29) |
 | (30) |
 | (31) |
 ,
,  is defined in (6), and
is defined in (6), and  is a positive definite matrix, which is a solution of the following Lyapunov equation
is a positive definite matrix, which is a solution of the following Lyapunov equation | (32) |
 is a positive definite matrix, and the parameter update laws are as follows:
is a positive definite matrix, and the parameter update laws are as follows: | (33) |
 | (34) |
 | (35) |
 | (36) |
 ,
,  ,
,  , and
, and  are positive constants, determining the rates of adaptations, and
are positive constants, determining the rates of adaptations, and  | (37) |
 | (38) |
 | (39) |
 ,
,  ,
,  , and
, and  , the above equation becomes
, the above equation becomes | (40) |
 | (41) |
 | (42) |
 | (43) |
 | (44) |
 | (45) |
 from (45), and the closed-loop system is asymptotically stable based on Lyapunov synthesis approach. This completes the proof.
from (45), and the closed-loop system is asymptotically stable based on Lyapunov synthesis approach. This completes the proof.4. An Example and Simulation Results
- Consider the second-order nonlinear system
 | (46) |
 and
and  are assumed to be unknown, and the
are assumed to be unknown, and the  is an unknown uncertain with unknown upper bound functions, i.e.,
is an unknown uncertain with unknown upper bound functions, i.e.,  , and
, and  is an output of a dead-zone. The control objective is to maintain the system output y to follow the reference signal
is an output of a dead-zone. The control objective is to maintain the system output y to follow the reference signal  .In the simulation, parameters of the dead-zone are
.In the simulation, parameters of the dead-zone are  ,
,  ,
,  . And their bounds are chosen as
. And their bounds are chosen as  ,
,  ,
,  ,
,  ,
,  ,
,  , and
, and  . In the implementation, six fuzzy sets are defined over interval[-3, 3] for both
. In the implementation, six fuzzy sets are defined over interval[-3, 3] for both  and
and  , with labels NB, NM, NS, PS, PM, and PB, and their membership functions are
, with labels NB, NM, NS, PS, PM, and PB, and their membership functions are ,
,  ,
, ,
,  ,
, ,
,  In this section, we apply the proposed robust adaptive fuzzy control approach in Section 3 to deal with the above second-order nonlinear system. Let
In this section, we apply the proposed robust adaptive fuzzy control approach in Section 3 to deal with the above second-order nonlinear system. Let  (so that
(so that  is stable) and
is stable) and  , then we have Lyapunov equation (32) and obtain
, then we have Lyapunov equation (32) and obtain | (47) |
 ,
,  ,
,  ,
,  , and
, and  , and
, and  ,
,  ,
,  , and
, and  ,and boundary layer
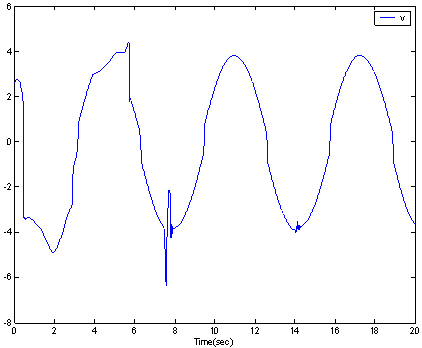
,and boundary layer  . Simulation results are shown in Figs. 3-5. Fig. 3 shows the position tracking performance. Fig 4 shows the velocity tracking performance. The control signal is shown in Fig. 5. Apparently, the proposed control scheme can achieve the objective of good tracking performance and robust stability simultaneously.
. Simulation results are shown in Figs. 3-5. Fig. 3 shows the position tracking performance. Fig 4 shows the velocity tracking performance. The control signal is shown in Fig. 5. Apparently, the proposed control scheme can achieve the objective of good tracking performance and robust stability simultaneously.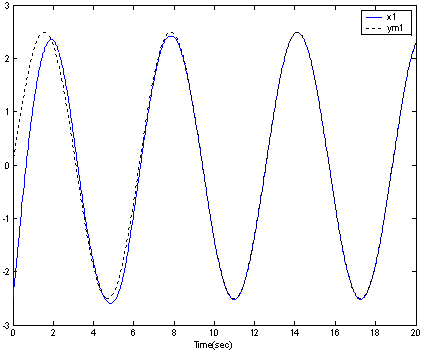 | Figure 3. The output  (solid line) and its desired value (solid line) and its desired value  (dashed line) (dashed line) |
 | Figure 4. The output  (solid line) and its desired value (solid line) and its desired value  (dashed line) (dashed line) |
 | Figure 5. The control input  |
5. Conclusions
- Dead-zone with unknown parameters in physical components may severely limit the performance of control, and its characteristics are quite commonly encountered in actuators in practical control systems. By using a description of a dead-zone and exploring the exploring the properties of this dead-zone model intuitively and mathematically, this paper presents the robust adaptive fuzzy control scheme without constructing the dead-zone inverse for a class of uncertain nonlinear systems containing an unknown dead-zone. Based on Lyapunov stability theorem, the proposed robust adaptive fuzzy control scheme can not only guarantee the robust stability of the whole closed-loop system with an unknown dead-zone in the actuator, but also obtain the good tracking performance. Finally, simulation results are illustrated to verify the effectiveness of the proposed method.
 Approaches,” IEEE Transactions on Fuzzy Systems, vol. 9, no. 2, pp. 278-292, 2001.
Approaches,” IEEE Transactions on Fuzzy Systems, vol. 9, no. 2, pp. 278-292, 2001.