-
Paper Information
- Next Paper
- Previous Paper
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
American Journal of Intelligent Systems
p-ISSN: 2165-8978 e-ISSN: 2165-8994
2012; 2(5): 93-103
doi: 10.5923/j.ajis.20120205.03
A Biologically Inspired Neural Network for Solar Powered Autonomous Surface Vehicles
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-Text HTML
Full-Text HTMLAntonio Guerrero-González , Francisco García-Córdova , Inocencio González Reolid , Napoli Gómez Ramirez
Underwater Vehicles Laboratory (UVL), Technical University of Cartagena (UPCT), Cartagena, 30203, Spain
Correspondence to: Antonio Guerrero-González , Underwater Vehicles Laboratory (UVL), Technical University of Cartagena (UPCT), Cartagena, 30203, Spain.
| Email: |  |
Copyright © 2012 Scientific & Academic Publishing. All Rights Reserved.
This paper describes a neural network model for the reactive behavioural navigation of an autonomous surface vehicle (ASV) in which an innovative, neurobiological inspired sensing control system and a hardware architectures are being implemented. The ASV is used to power and support for a Unmanned Underwater Vehicle (UUV), which incorporates several types of environmental and oceanographic instruments such as CTD sensors, chlorophyll, turbidity, optical dissolved oxygen (YSI V6600 sonde) and nitrate analyzer (SUNA) together with ADCP, side scan sonar and video camera. The ASV gets its energy through solar photovoltaic modules, also has automatic devices for the deployment and collection of underwater robots. Navigation system contains accelerometers, gyroscopes, magnetometers and GPS, to reach an appropriate level of spatial location at all times, and corrects trajectory using a neural control algorithm to process the corresponding corrections.
Keywords: Autonomous Platform Vehicle (ASV), Neural Networks, Obstacle Avoidance, Robot Navigation, Learning Control Adaptive Behaviour, Solar Boats
Article Outline
1. Introduction
- The brains of migratory animals builds cognitive maps that guide the seasonal movement using sensors that capture information from the earth, the sun, stars and an internal biological clock[1]. Loggerhead sea turtles (Caretta caretta) may make travels transoceanic sailing longitudinally or from east to west, with no visual landmarks. They do this by magnetic signals[2]. Apparently, they get to navigate thanks to never lose sight of the inclination and intensity of Earth's magnetic field in the form of a "magnetic signature" (see Figure 1), creating a magnetic map in their brains with "bi-coordinate", so, get sailing from east to west, from north to south and in reverse, along their migration routes[3],[4],[5],[6].
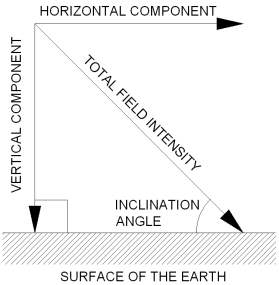 | Figure 1. Intensity and inclination of Earth’s magnetic field |
2. Description of the Experimental Platform
2.1. Description of the Platform-UPCT
- In Figure 2, the experimental platform (ASV) for autonomous surface navigation is shown. This platform has on top a mobile structure with photovoltaic modules. These modules are automatically collected and extend to protect them if the platform is moved by land or by boat, and also when the wind exceeds a certain speed in storms or storm surge.The experimental platform has also gel batteries, a biodiesel generator, a battery charge controller, a battery charger, the pods and the automatic system for collecting and releasing the underwater robots.Photovoltaic Modules used is PHOTOVOLTAIC ENECON ITALIA SRL of 130 Wp, made of monocrystalline silicon cells with high performance and flexible. It is used to capture and convert solar radiation into electrical energy. Regulator FLEXmax is used to prevent overcharging of the batteries and prevent discharge to the plates, when no solar radiation.
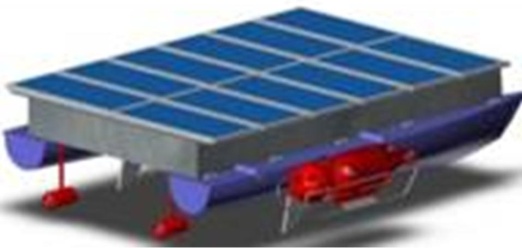 | Figure 2. Experimental platform-UPCT |
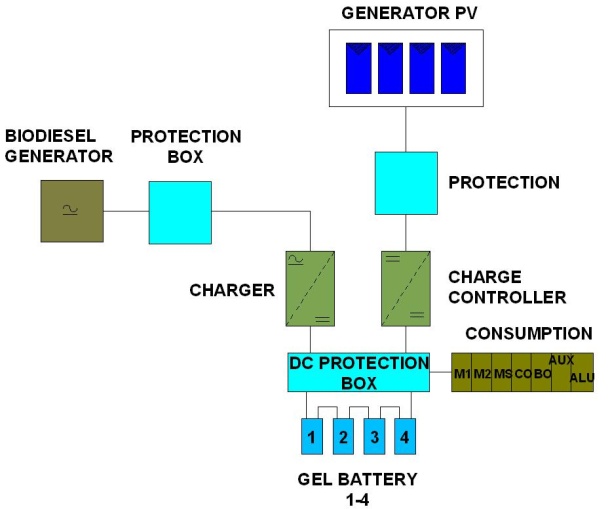 | Figure 3. Scheme of the energy installation |
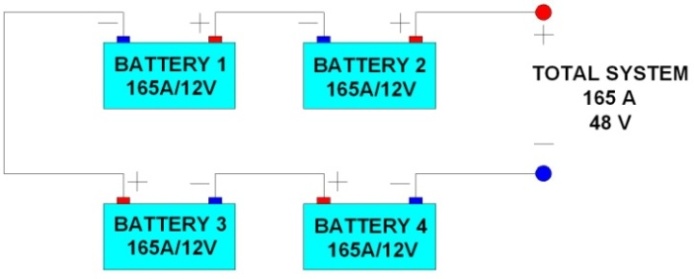 | Figure 4. Scheme of connection of the batteries |
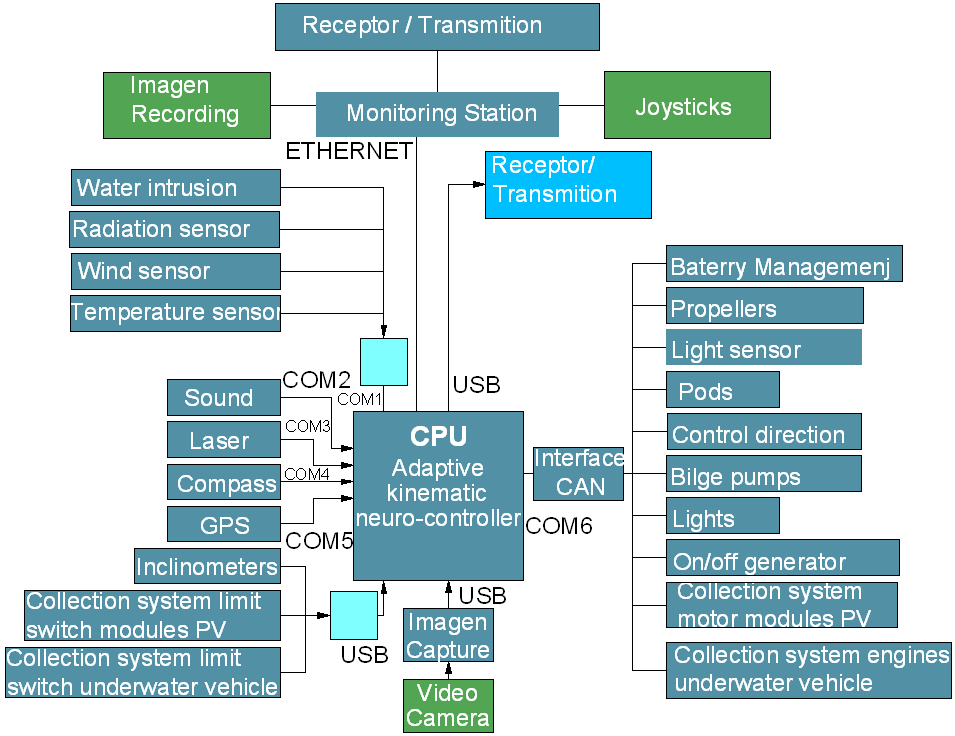 | Figure 5. Interconnection elements of hardware control system from the platform-UPCT |
2.2. Navigation System of the ASV
- The main goal of the navigation system is to achieve an appropriate level of spatial location at all times, allowing trajectory correction using a neural control algorithm, to process the corresponding corrections. Initially, consider three types of missions and each one different positioning procedure.A global positioning system (GPS) mounted on the vehicle, as usual, will be modified for navigation in shallow waters when long time submerged operation is required. Two options are being considered: a surface-towing buoy with GPS and RF communications system or a kind trolley-pole linked to the buoy when accuracy in location is a critical factor.When no accurate bathymetry is available or unexpected wreck can be found the proposed neural control algorithm would avoid collision risk.In deep waters, regular emersions of the vehicle are not feasible, so the neural control system represents the most suitable system to avoid obstacles and allow the spatial location of the vehicle. Using an inertial navigation system combined with the control algorithm and a calibration of positioning bathymetric points of reference, the position of the vehicle is permanently submerged. In this case, it is important to define the benchmarks in the seabed with the utmost accuracy thus allowing the vehicle to find and modify the following path on the basis of these data. In addition, there is being implementing a complementary algorithm to allow the vehicle to be able to search and find the seafloor reference in case of lost the expected location.In order to save the maximum level of available energy it is mandatory minimizing the number of 'search and find' operations. So it is strongly recommendable to check the course deviation in the study area before each mission. In this way, definition of the local deviation parameters and its use as inputs to calibrate the control system will minimize the tracking deviation.
2.3. Neural Control System
- Figures 6 and 7 illustrate our proposed neural architecture. The trajectory tracking control without obstacles is implemented by the SODMN and the avoidance behaviour of obstacles is implemented by a neural network of biological behaviour.For a dynamic positioning in the path tracking a PID controller was incorporated into the architecture of control system. It allows smooth the error signal in the reaching of objectives.
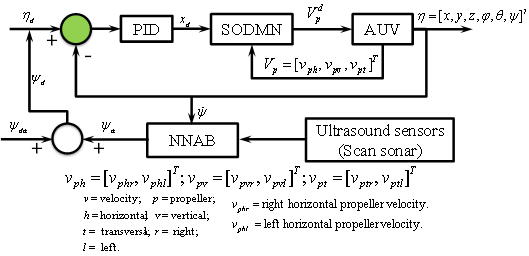 | Figure 6. Neural architecture for reactive and adaptive navigation of an ASV |
2.3.1. Self-Organization Direction Mapping Network (SODMN)
- The SODMN learns to control the robot through a sequence of spontaneously generated random movements (shown in Figure 6). Random movements enable the neural network to learn the relationship between angular velocities applied at the propellers and the incremental displacement that ensues during a fixed time step. The proposed SODMN combines associative learning and Vector Associative Map (VAM) learning[30] to generate transformations between spatial coordinates and coordinates of propellers’ velocity. The nature of the proposed kinematic adaptive neuro-controller is that continuously calculates a vectorial difference between desired and actual velocities, the ASV can move to arbitrary distances and angles even though during the initial training phase it has only sampled a small range of displacements.Furthermore, the online error-correcting properties of the proposed architecture endow the controller with many useful properties, such as the ability to reach targets in spite of drastic changes of robot’s parameters or other perturbations.At a given set of angular velocities the differential relationship between underwater robot motions in spatial coordinates and angular velocities of propellers is expressed like a linear mapping. This mapping varies with the velocities of propellers.
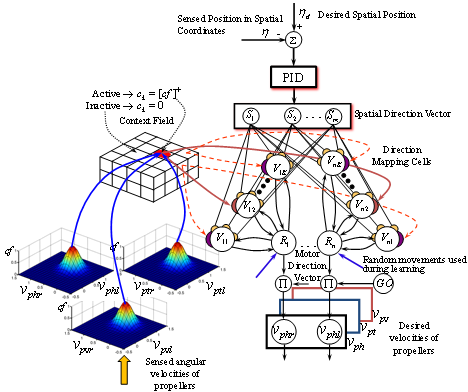 | Figure 7. Self-organization direction mapping network (SODMN) for the trajectory tracking of an ASV robot |
 computes a difference of activity between the spatial and motor direction vectors via feedback from DVm. During learning, this difference drives the adjustment of the weights. During performance, the difference drives DVm activity to the value encoded in the learned mapping.A context field cell pauses when it recognizes a particular velocity state (i.e., a velocity configuration) on its inputs, and thereby disinhibits its target cells. The target cells (direction mapping cells) are completely shut off when their context cells are inactive. This is shown in Figure 6. Each context field cell projects to a set of direction mapping cells, one for each velocity vector component. Each velocity vector component has a set of direction mapping cells associated with it, one for each context. A cell is “on” for a compact region of the velocity space. It is assumed for simplicity that only one context field cell turns “on” at a time. In Figure 6, inactive cells in the context field are shown as white disks. The center context field cell is “on” when the angular velocities are in the center region of the velocity space, in this three degree-of-freedom example. The “on” context cell enables a subset of direction mapping cells through the inhibition variable ck, while “off” context cells disable to the other subsets. When the kth context cell is "off" or inactive (modeled as ck=0), in its target cells, the entire input current to the soma is shunted away such that there remains only activity in the axon hillock, which decays to zero. When the kth context cell is "on" or active, ck =1, its target cells (Vik) receive normal input.The DVs cell activities are
computes a difference of activity between the spatial and motor direction vectors via feedback from DVm. During learning, this difference drives the adjustment of the weights. During performance, the difference drives DVm activity to the value encoded in the learned mapping.A context field cell pauses when it recognizes a particular velocity state (i.e., a velocity configuration) on its inputs, and thereby disinhibits its target cells. The target cells (direction mapping cells) are completely shut off when their context cells are inactive. This is shown in Figure 6. Each context field cell projects to a set of direction mapping cells, one for each velocity vector component. Each velocity vector component has a set of direction mapping cells associated with it, one for each context. A cell is “on” for a compact region of the velocity space. It is assumed for simplicity that only one context field cell turns “on” at a time. In Figure 6, inactive cells in the context field are shown as white disks. The center context field cell is “on” when the angular velocities are in the center region of the velocity space, in this three degree-of-freedom example. The “on” context cell enables a subset of direction mapping cells through the inhibition variable ck, while “off” context cells disable to the other subsets. When the kth context cell is "off" or inactive (modeled as ck=0), in its target cells, the entire input current to the soma is shunted away such that there remains only activity in the axon hillock, which decays to zero. When the kth context cell is "on" or active, ck =1, its target cells (Vik) receive normal input.The DVs cell activities are | (1) |
 | (2) |
 | (3) |
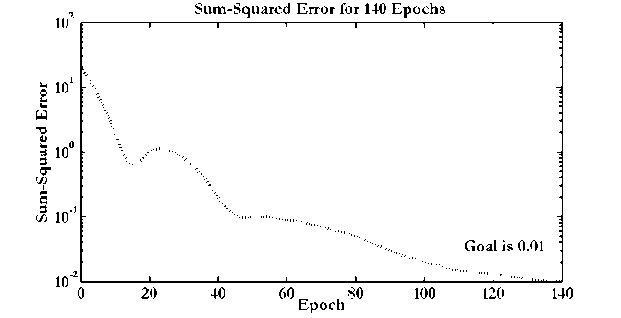 | Figure 8. Evolution of the mean square error in the learning phase |
 | (4) |
2.3.2. Neural Network for the Avoidance behavior (NNAB)
- The obstacle avoidance adaptive neuro-controller is a neural network that learns to control avoidance behaviours in an ASV robot based on a form of animal learning known as operant conditioning. Learning, which requires no supervision, takes place as the robot moves around a cluttered environment with obstacles. The neural network (shown in Figure 8) requires no knowledge of the geometry of the robot or of the quality, number, or configuration of the robot’s sensors. Our implementation is based in the Grossberg’s conditioning circuit, which follows closely that of Grossberg & Levine[40], Chang & Gaudiano[41] and[42].
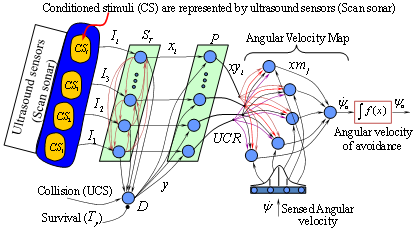 | Figure 9. Neural network for the avoidance behavior (NNAB) |
 | Figure 10. Positive Gaussian distribution represents the angular velocity without obstacle and negative distribution represents activation from the conditioning circuit. The summation represents the angular velocity that will be used to drive the robot |
2.3.3. Set of Oceanographic Instruments Installed on the ASV
- In order to provide a wide range of oceanographic research capabilities, the ASV-UPCT was equipped with several types of environmental and oceanographic instruments[43]. This allows the vehicle to carry out different types of missions, depending on research interests or needs. Two main areas of study with different results are supported by the vehicle operation: Shallow- and open-water missions.Figure 11 shows the location of the areas chosen for both type of missions: The Mar Menor coastal lagoon for shallow water missions and the shelf-break off Cape Tiñoso, both located in the Region of Murcia (Spain).
 | Figure 11. Map representing both research areas. Aerial view of the Mar Menor Lagoon and Cape Tiñoso in Cartagena-Murcia, Spain |
 | Figure 12. Location of the study zone. Aerial view of the Mar Menor lagoon, in Murcia, Spain |
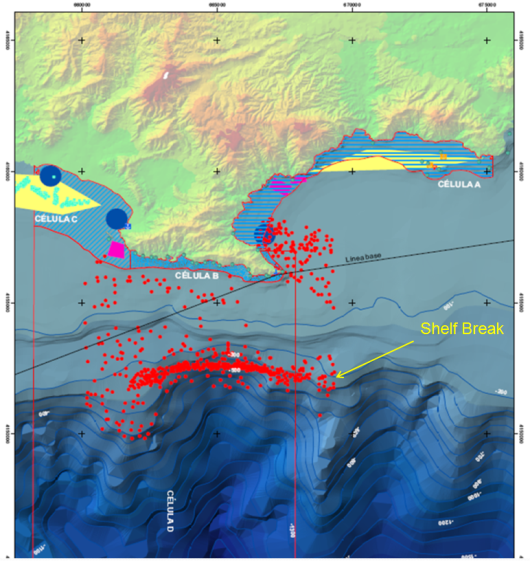 | Figure 13. Shelf-break off Cape Tiñoso. Red dots mean position where local fisheries effort is carried out |
3. Experimental Results
3.1. Proposed Control System for the ASV Robots
- The proposed neural network model is capable of generating optimal trajectory for ASVs in an arbitrarily varying environment. The state space is the Cartesian workspace of ASV. The tests of the proposed control system were carried out under a simulation (real) environment.
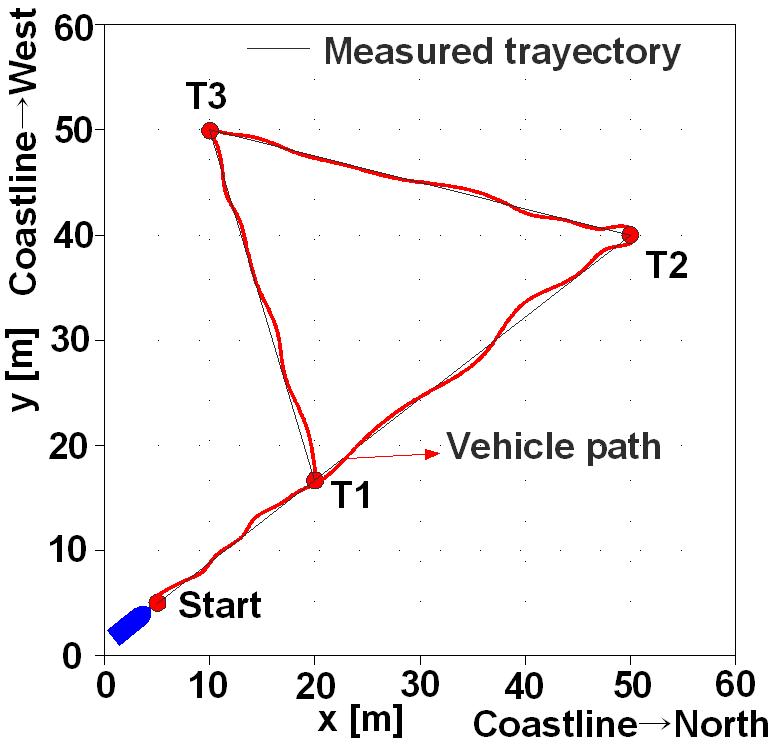
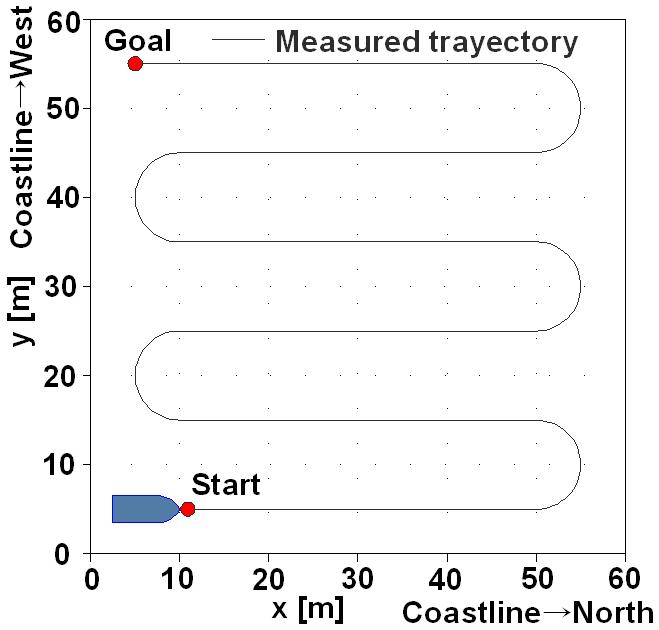 | Figure 14. Trajectory tracking of the experimental platform |
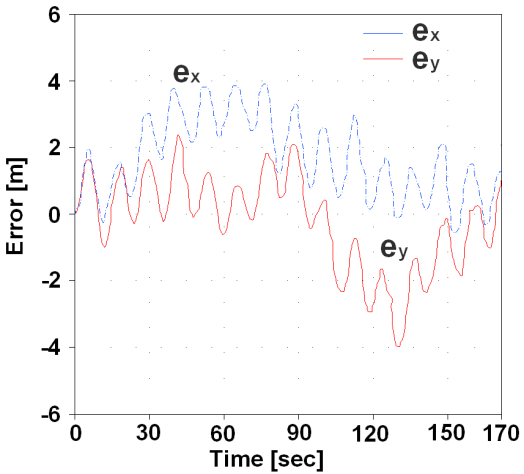 | Figure 15. Tracking error of the experimental platform |
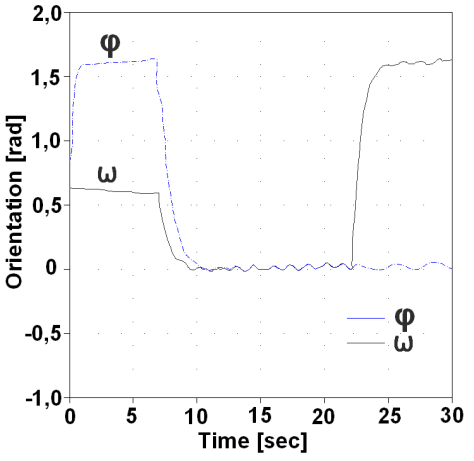 | Figure 16. Orientation of the experimental platform |
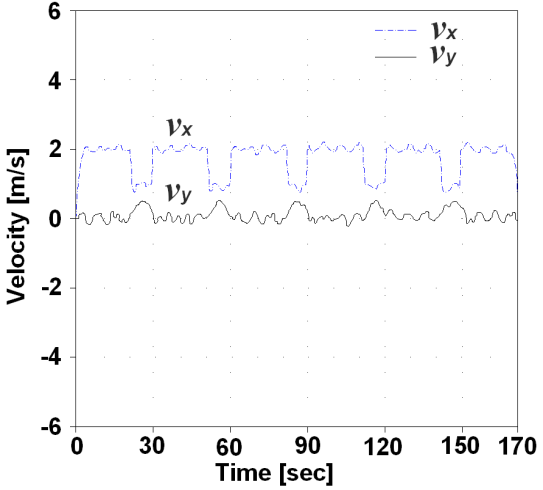 | Figure 17. Velocity of the experimental platform |
3.2. Trajectory Generation Training
- The proposed neural network system was trained off-line with different types of trajectories with and without obstacles. After training, the first paths and targets were simulated on an environment without obstacles, where the ASV presented favourable results for the orientation, trajectory and desired goal.In the simulation environment was set a desired trajectory to follow and has added a number of mobile obstacles, which may represent boats that crosses the desired path of the ASV and moves with a speed and specific direction.The robot detects the boat as an obstacle, early enough, and calculates its direction and speed. Then the control system proceeds to change the trajectory of ASV to avoid the obstacle and finally returns to the desired path, to continue the indicated exploration mission, as shown in Figure 18. This figure shows the trajectory generated by the ASV in dotted lines.Figure 19 shows the simulation of a desired trajectory for the ASV with moving objects, which can be two boats that cross in the trajectory of the ASV. During simulation, the robot proceeded to avoid the obstacles, with increasing accuracy, because the learning of the neural control system proposed also what performed on-line.
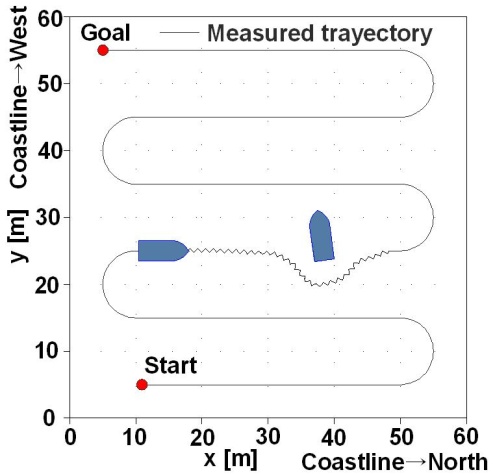 | Figure 18. Trajectory followed by the experimental platform in presence of obstacles |
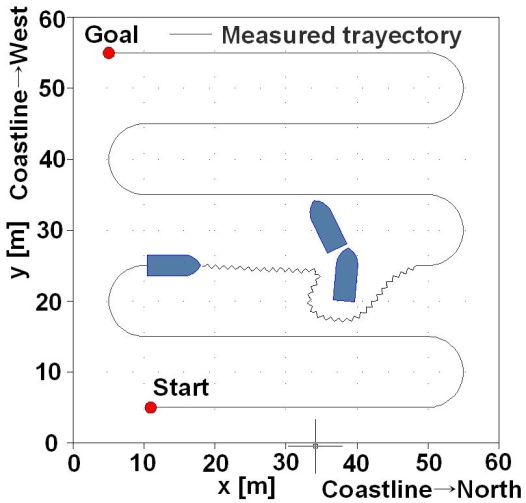 | Figure 19. Obstacles avoidance trajectory |
 | Figure 20. Trajectory of the reach from experimental platform |
4. Conclusions
- In this paper, a library of training patterns for off-line learning of the proposed neural network has been developed on a simulation environment using Matlab®. These training patterns were generated with several randomly trajectories in an environment with static and moving obstacles. In the simulation, different obstacles by varying the size, speed and direction were used. Various disturbances under simulation to create an unstable environment of the ocean by changing conditions of sea currents, wind, storm, or waves were incorporated into the control system.The robotic platform (ASV-UPCT) has sonar and laser sensors for obstacle detection, radiation sensors and power consumption for energy management, and a GPS for tracking the desired trajectory.The SODMN learns to control the robot through a sequence of spontaneously generated random movements. The random movements enable the neural network to learn the relationship between angular velocities applied at the propellers and the incremental displacement that ensues during a fixed time step. Furthermore, the nature of the proposed kinematic adaptive neuro-controller is that continuously calculates a vectorial difference between desired and actual velocities, the ASV can move to arbitrary distances and angles even though during the initial training phase it has only sampled a small range of displacements.Also, the obstacle avoidance adaptive neuro-controller is a neural network that learns to control avoidance behaviours in the ASV robot based on a form of animal learning known as operant conditioning. Learning, which requires no supervision, takes place as the robot moves around a cluttered environment with obstacles. This neural network requires no knowledge of the geometry of the robot or of the quality, number, or configuration of the robot’s sensors.The ASV-UPCT has a magnetic compass, which works as a complement to the integrated GPS for a navigation and positioning more fully. Also, it has additional sensors which measure the carbon dioxide content of the water, the degree of contamination of it, the air pressure, wind speed or temperature of the oceans. The data obtained provides valuable information. On the other hand, this boat robot can control and monitor events such as accidental oil spills.Furthermore, this is able to follow a path without human assistance, while it takes samples used for scientific research on climate change or chemical composition of the oceans. Also, it provides energy and provides support for autonomous underwater vehicles (AUV-UPCT)[46].
ACKNOWLEDGEMENTS
- Authors thanks the Spanish Navy for kindly made over the vehicle to UPCT to its re-construction for environmental and oceanographic studies. This project is in part supported by Coastal Monitoring System for the Mar Menor (CMS- 463.01.08_CLUSTER) project founded by Regional Government of Murcia and by BUSCAMOS project (Design of an Autonomous Experimental Platform Solar Powered for Inspections and Oceanographic Mission-UPCT: DPI-2009-14744-C03-02) founded by Spanish Ministry of Science and Innovation from Spain.