-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
American Journal of Geographic Information System
p-ISSN: 2163-1131 e-ISSN: 2163-114X
2020; 9(2): 55-63
doi:10.5923/j.ajgis.20200902.02

Assessing the Accuracy of Tree Height Quantification Models Derived from Unmanned Aerial System Imagery
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLMohammadreza Safabakhsh Pachehkenari 1, Hadi Fadaei 2
1Department of Science in Remote Sensing and GIS, College of Geography, Azad Central Tehran University, Iran
2Department of Social Informatics, Graduate School of Informatics, Kyoto University, Japan
Correspondence to: Mohammadreza Safabakhsh Pachehkenari , Department of Science in Remote Sensing and GIS, College of Geography, Azad Central Tehran University, Iran.
| Email: |  |
Copyright © 2020 The Author(s). Published by Scientific & Academic Publishing.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

In recent years, scholars have witnessed the increasing progress of using unmanned aerial systems (UASs) in topographic mapping due to its lower cost compared with alternative systems These UASs enables tree height estimation by capturing overlapped images and generating 3D point cloud through the structure from motion (SfM) algorithm. To ensure that the normalized digital surface model (nDSM) in the mountain areas is created accurately, careful attention to flight patterns and uniform distribution of ground control points (GCPs) are necessary. To this end, a quadcopter equipped with an RGB camera is used for imaging an area of 131 hectares in two steps: firstly, through a single flight strip with an optimized distribution of GCP and secondly through an improvement of the flight configuration. Afterward, two nDSMs were created by the automatic processing of raw images of both approaches. The prominent results demonstrate that the smart integration of key parameters in flight design can bring the root mean square errors (RMSE) down to 52.43 cm without the need to include GCPs. However, using GCPs with an appropriate distribution culminates in RMSE of 33.59 cm, which means 35.93% better performance. This study highlights the impacts of optimal distribution in GCP on nDSM accuracy, as well as the strategy of using images extracted from the combination of two flight strips with different altitudes and high overlap when local GCP is inaccessible, was found to be beneficial for increasing the overall nDSM accuracy.
Keywords: Tree height estimation, Unmanned aerial systems (UASs), Ground control points (GCPs), Normalized digital surface model (nDSM)
Cite this paper: Mohammadreza Safabakhsh Pachehkenari , Hadi Fadaei , Assessing the Accuracy of Tree Height Quantification Models Derived from Unmanned Aerial System Imagery, American Journal of Geographic Information System, Vol. 9 No. 2, 2020, pp. 55-63. doi: 10.5923/j.ajgis.20200902.02.
Article Outline
1. Introduction
- Trees height is one of the most significant parameters of the ecosystem because it is closely related to ecological functions and ecosystem biodiversity [1]; thus, obtaining its accurate geospatial data for forest applications is essential [2], which necessitates using an effective methodology [3]. Most remote sensing satellites barely measure vertical structural information of trees because they lack suitable spatial resolution. Although multi capabilities of light detection and ranging (LiDAR) technology propose the right solution for height estimation (as waves are capable of penetrating the dense vegetation), to the same proportion, we are facing its high costs and dealing with enormous amounts of data that it's difficult to organize [4]. Hence, a cost-effective and efficient approach is required to digitize the land, which not only fits into the various topographical features of the intended area but also provides the desired spatial resolution. Nowadays, quadcopters are known as a critical part of modern photogrammetry, which can collect high radiometric resolution images by connecting non-metric digital cameras to a small flight platform, thanks to its harmless features, usability, excellent stability, and ability to record [5]. Algorithms like, structure from motion (SFM) and multi-view stereo (MVS) are highly efficient, inexpensive and user-friendly approaches to reconstruct high-resolution modeling in places with complex topography which greatly improve the automation of photogrammetric workflow [6]. SFM is a photogrammetric technique based on computer vision for extracting a 3D structure from multiple-view images taken with moving cameras [7]. Comparing the evaluation of SFM/MVS methods, which do not need prior knowledge about camera position and its parameters, to the conventional photogrammetric methods illustrates that time and expenses can be diminished through these novel approaches, and it can be considered as a flexible alternative due to the high time-frequency observations [6]. Based on the dense point cloud generated using SFM technique, high spatial resolution orthophoto mosaic and digital surface/terrain models can be generated [8,9] which is critical for plant structure assessment [10]. Losing about 350 square meters of forest every second causes climate change in Iran, which generates 715 million tons of carbon dioxide annually. In this regard, SFM-based normalized digital surface models can be updated regularly, as a practical approach to obtain accurate information about plant surface features such as tree height. These measures are essential for monitoring and simulating forest regeneration activities and for quantitative analysis of forest structure and dynamics [11]. The nDSM denotes the absolute altitude of artificial altitudes relative to ground elevation which can be determined by height normalization through an existing digital terrain model (DTM) (i.e. DTM must be subtracted from DSM) [10].
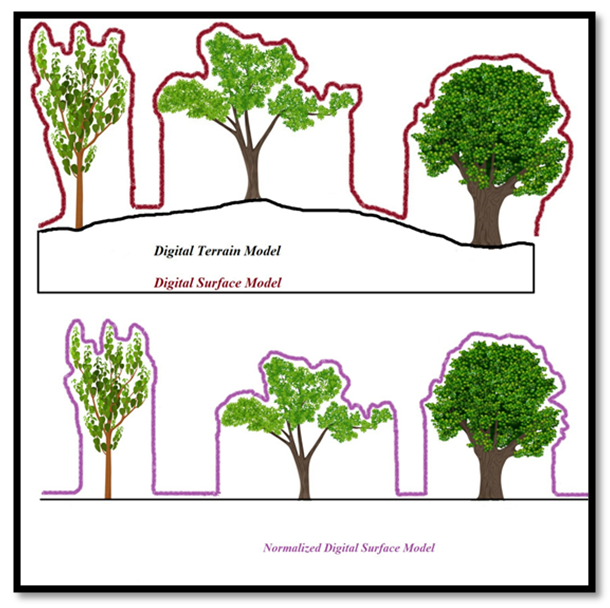 | Figure 1. Schematic of DEM types |
2. Materials and Methods
2.1. Study Area
- The photographed area is about 4350 hectares, located in southwestern Iran in Khuzestan province. This area is also located at a 39 km distance from Koushka, a village in the outskirts of the Koohrang city in Chaharmahal Bakhtiari province of Iran. The geographical coordinates of the region are ′ 18 ′ 22 ° 32 ° N latitude and ″ 52 ′ 50 ° 49 E longitude.
2.2. UAV Platform and Primary Data Collection
- A Sony Cyber-shot DSC-WX220, 18 MP digital camera was used to perform photogrammetric 3D point determination. The flight elevation is 100 meters, and its spatial resolution is 0.0315 meters. The drone is controlled manually to take pictures at the size of 4896 × 3672 pixels with excellent quality.
2.2.1. Based on a Single Flight and Optimal Configuration of GCPs
- According to the literature section, the spatial distribution of GCPs is directly related to the geometric accuracy. In light of this evidence, our strategy to distribute GCPs in space as uniformly as possible which can cover elevations variability was conducted based on as the following points: 1. Getting GCPs at the corners of the photogrammetric block to model the possible distortions patterns and errors of the entire block.2. Setting GCPs at the center of the area to cover the elevation distortions of the entire block. 3. Consideration must be given to the equidistant coverage and the angle between the GCPs, because the angle between them will be calculated during the bundle adjustment process [23].Based on these tips, nine ground control points (GCPs) are appointed and measured in the area, to insert related information into the software during the processing stage. Fig 2, demonstrates the GCP’s configuration used in this study. The quadcopter was then controlled to fly over the pre-designed path and aerial path. The aerial photography of the is performed by capturing 49 color images with 4mm focal length and 3.15 cm ground sampling distance.
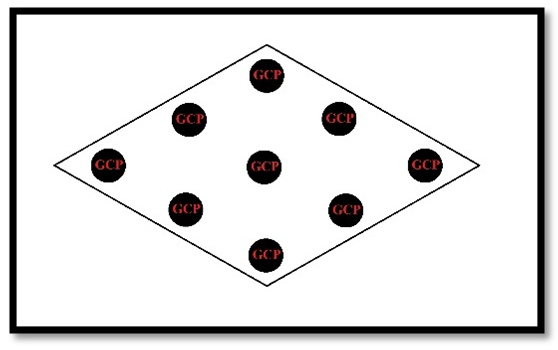 | Figure 3. GCP configuration for the photogrammetric block in the approximate shape of the study area |
2.2.2. Based on Flight Planning Parameters and without Using of GCPs
- In order to optimize the UAS campaigns, especially when setting and measuring GCPs is accompanied by inaccessibility or severe shortages of time and financial resources, we evaluated the impact of flight planning on the accuracy of nDSM, and in particular the calculation of tree height. Interlocking ideas which affect the calibration of aerial cameras are used to manage drones operations such as increasing image overlap, the integration of two flight strips with different elevation and camera angles. In this study, the flight mission was planned with two intersecting blocks consisting of two flight paths with imaging at two different heights (as shown in the figure below). All photos taken in the abovementioned blocks included 80% frontal overlap and 60% lateral overlap. Since the tilt of the camera is usually determined based on local morphology, a nadir camera tilt was chosen due to the roughness of the area. The quadcopter is equipped with a GPS-enabled receiver which can be connected to the satellites and this capability helps it to save the camera’s location during data capturing. Afterward, all these images were combined in one process. This innovative technique was implemented to improve the outputs of bundle block adjustment and, subsequently, increasing the planar and vertical accuracy. By doing so, the role of an optimal configuration of a photogrammetric block in nDSM quality derived from this method can be understood better.
|
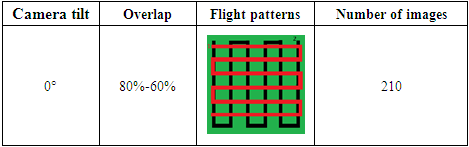
 | Figure 4. Interlocking parameters in flight plans |
2.2.3. Field Measurements for Results Validation
- According to the field observations, the height of 25 random trees was evaluated. Each amount of height is calculated by measuring horizontal and vertical distance and the angle of slope between meters and targets. Then, the location of each tree is also recorded by manual GPS. These ground measurements were used to determine the accuracy and overall correlation coefficient of the results obtained through photogrammetric image processing.
2.3. Generation of DSM, DTM, Ortho-images
- Considering two different approaches to data collection, this step was also performed in two series to produce two tree height models at the end. This phase was automatically carried out in Agisoft photoscan software. Using Align Photos function, the relative orientation of images to each other was done [24]. After the relative orientation of the images is established, the exterior orientation for the first model should be made using GCPs. hence nine GCPs were marked in the software and bundle block adjustment performed automatically, so all images were accurately georeferenced by the ground control information. A total of 65211 key points were used for the BBA with 7189256 3D points. The mean reprojection error of the adjustment was 0.41. No GCPs were used for the second model at this stage, just the positioning information derived from UAVs GPS was used and the camera parameters were accordingly improved to optimize the model precision. Key points, 3D points and reprojection error of the adjustment were 130422, 11084480 and 0.63 respectively. The continuation of the image processing from this point was repeated exactly for each model. Then dense point cloud surfaces are generated. Also, this point cloud was interpolated using the triangular irregular network (TIN) and a 3D digital model was created. Agisoft Photoscan determines the surface models as DEM, which in this case are the same as DSM. It should be noted that mesh reconstruction based on dense point clouds facilitates the generation trend of DSM, yet to generate a DTM this method cannot be applied because our points are not classified [25]. A set of points should be selected that exist on the ground surface. Therefore, mesh reconstruction allows for DTM extraction only based on ground points.
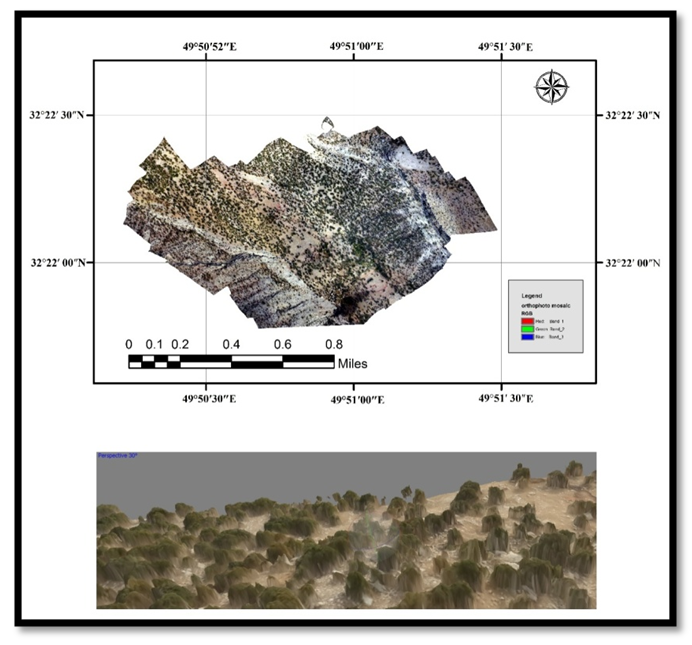 | Figure 5. UAS derived Orthomosaic & 3D model construction |
3. Results
3.1. Creating the Normalized Digital Surface Models
- The nDSM is a digital model with elevation changes which includes all-terrain features. Considering the method of nDSM generation as explained earlier, we used ArcGIS software to subtract the DTM from DSM and extraction of tree height. For this purpose, we converted the filing containing XYZ values to raster format. In order to generate nDSM in ArcGIS software, the following workflow should be implemented:First: Arctoolbox >>>> Conversion Tools >>>> In Raster.Second: Arctoolbox >>>> 3D Analyst Tools >>>> Raster Math >>>> Minus.With the same workflow, we extracted two tree height models and the following figure represents one of the final generated models.
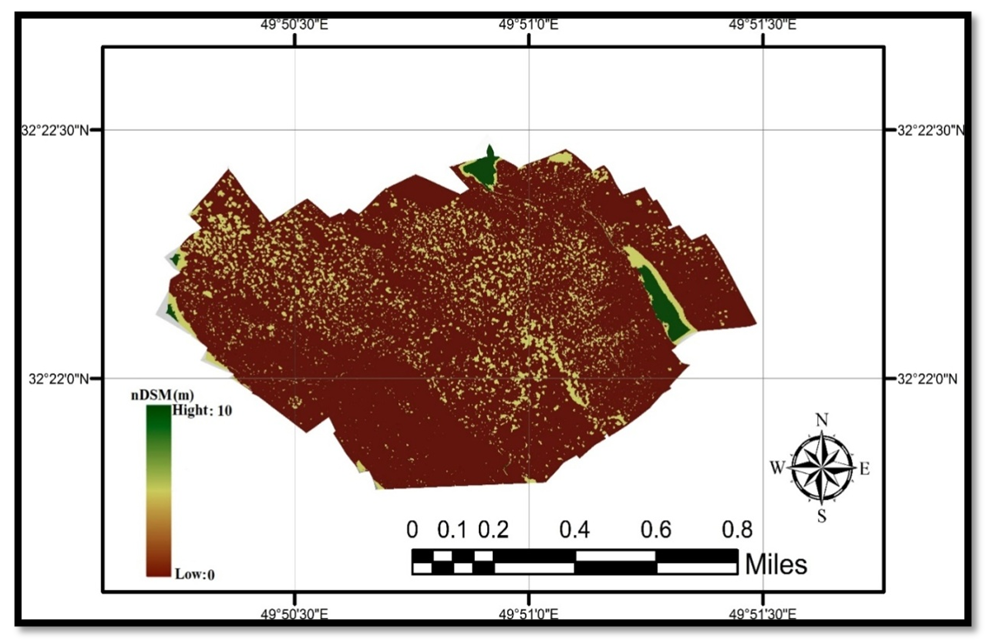 | Figure 6. Normalized digital surface model based on flight plan |
3.2. Evaluating the Accuracy of Generated Digital Surface Models
- According to the quality assessment results of the extracted DSMs as summarized in Table 2, the equal distribution of GCPs is imperative for the DSM accuracy. Moreover, implementing geometric self-calibration methods based on flight design also provides acceptable accuracy.
|

3.3. Validation Between nDSM-Derived Heights and Field Measurements
- The height values 25 trees were extracted from two generated models and then we plotted linear regression and their correlation coefficient values using Excel program and obtained the root-mean-square deviation as a statistical index for assessment of values accuracy. To assess the two different methods employed to calculate tree height from the UAS imagery, we computed RMSE and Normalized RMSE of the height estimates using the following equations:
 | (1) |
 | (2) |
|

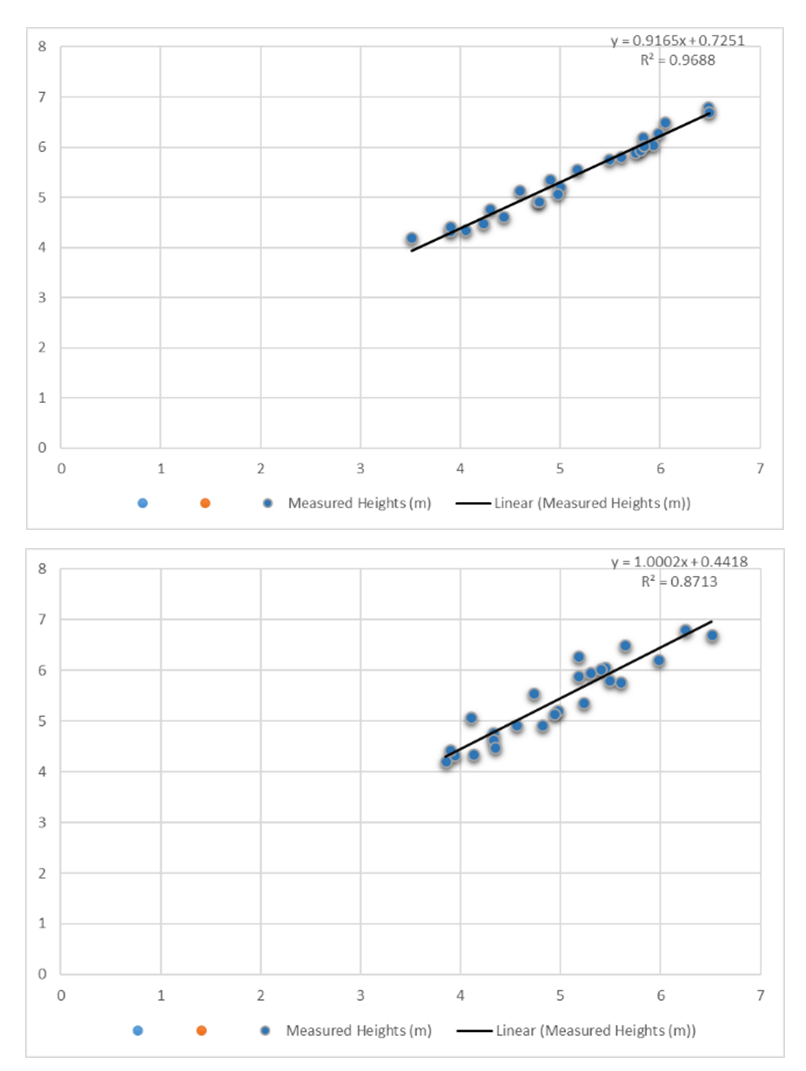 | Figure 7. Linear regression analysis on tree height estimation |
4. Discussion
- The structural characteristics of trees, in particular, their heights, are biologically and economically important. The first step in sustainable vegetation management is finding accurate and updated information. Using remote sensing data, especially UAVs in vegetation management studies has attracted attention, as field data acquisition is a too expensive and time-consuming process. The authenticity of the normalized digital surface model derived from the UAS-SFM approach is reliable to assess tree heights. Previous research, in line with the disciplines of UAS photogrammetric, proposed several procedures to generate more accurate 3D models of the terrain surface with the least error rate. A wide range of these studies has focused on employing GCPs and its different density and placements to reduce errors and boost nDSM accuracy derived from UAS-SFM. Evaluation of these findings helps to better understand the role of GCP’s density in planar and vertical accuracy of UAS-derived digital elevation models. It is not easy to determine the exact number of GCPs required at a photogrammetric block. However, because the planar accuracy of digital models is always better than vertical accuracy, the number of GCPs needed to produce reliable results is not generally high [26]. Setting approximately 5 to 7 GCPs provide good performance to decrease the error range. Although there are no fixed rules on how to GCPs, the uniform distribution of all points is highly recommended [27].The main objectives of this research are to improve the normalized digital surface model derived from UAS-SFM data processing and to afford an opportunity to calculate the exact height of trees. In this regard, two different methods of increasing the accuracy proposed and analyzed. Our first strategy was to optimize the configuration of GCPs and we tried to distribute GCPs uniformly on corners and centers of the area to find the most accurate nDSM. But, the uneven areas covered by vegetation cause a lack of proper access for setting GCPs, and there is not a practical and affordable solution that can be applied for remote regions. So in the second step, the research is focused on designing an effective procedure for getting closer to the accuracy of the GCP-BBA method and accordingly, we idealized the flight plan. Because the final results of UAS-SfM Photogrammetry with non-metric cameras are deeply influenced by other factors such as flight pattern, flight elevation, morphology, camera angles, and the amount of overlap. There are several studies that have been conducted to investigate tree height based on nDSM through UAS results. However, there is a research gap in assessing the impacts of GCPs’ configuration and the integration of all key parameters of the flight plan at the same time on the accuracy of the tree height model (in a mountainous area).Results demonstrate that GCP-BBA provides better accuracy compared to the flight plan of this study. However, field self-calibration based on flight parameters and image capturing conditions seem so effective in improving the results of block adjustment. Using the flight operation on two orthogonal routes at two different heights with high forward and lateral overlap leads to reconstructing data from various perspectives and further enhancement of observations and resulted in reducing planar and vertical errors. Besides, a 90-degree vertical view was considered for the imaging process because the study area was not flat.Lim et al. [28] calculated the tree height situated on a flat area by using a UAV without obtaining GCP, which resulted in RMSE = 0.84m. K. Zainuddin et al. [29] achieved RMSE = 66.2cm result in a similar study with the same operating conditions but using images obtained with UAV at a low-altitude. Whereas the validation result of the nDSM derived tree height estimation based on our method showed the greater potential to improve accuracy even in an uneven area and also thereby reducing the complicated and time-consuming collection of GCPs in the region. However, the best procedure selection depends heavily on project objectives, and time and cost involved.Concerning the application of GCPs, measurement error in tree height estimation was calculated approximately 5.6cm higher than Birdal et al. results. However, Birdal et al obtain six GCPs in one-hectare which has a high GCP density, that imposes much higher costs and operations compared to what is done in this research by setting three more GCPs in a much larger study area. Besides, their flight altitude was so close to the ground. It is worth noting that the morphology of trees is so essential because detecting and separating the tree-crown boundaries affects the accuracy of height estimation [30]. For instance, Iizuka et al. [31] assessed a very dense forest area to estimate its tree height with root mean square error of 1.71m. But, Iran’s vast forest consists of a low-dense forest which afford an opportunity of using a drone’s images of single tree-crown to quantify heights.This research highlights the suitability of the second method which uses the integration of flight plans of the imaging platform to reduce the need for ground operations and errors of tree height estimation. But it is still necessary to expand the scope of these studies, future studies can evaluate the integration of UAS-RTK with combined flight patterns and high overlap or the installation of low-cost LiDAR sensors (such as the Livox Mid-100) on the quadcopter for reduction of GCP requirements for mapping dense forest areas. Developing strategies that improve the accuracy of UAS-SFM derived products could shed light on the systematic monitoring of biophysical parameters.
5. Conclusions
- In this research, two normalized digital surface models (nDSM) were derived by processing UAS-surveys data. Utilizing our results in tree height quantification based on this approach, several suggestions are put forward:1. The nDSM derived from UAS provides an adequate accuracy to estimate the height of the trees. Whereas vertical accuracy as the main criterion of these models is lower than planar accuracy in both proposed approaches. This is likely due to these two facts:i) The low base / height ratio, which is a more accurate reconstruction of surface features.ii) Improving the distribution of GCPs and increasing overlapping can boost the vertical accuracy to a certain extent so that after reaching the threshold they can no longer increase its accuracy.2. With the optimal distribution of GCPs in UAS-photogrammetry, tree height was estimated to be 35.93% more accurate than the idealized flight plan. It is while setting GCPs in a mountainous area is an intricate part of all projects. Also the error of estimating tree height based on flight planning was also below 53 cm and provided a competitive accuracy. That is, it can significantly affect the overall quality of nDSM. Therefore, it should be programmed thoroughly to provide standard topographic data.3. Less operational complexity, minimizing cost, and effective replacement in reducing errors of tree height models in remote areas are the prominent advantages of using the smart integration of key parameters in the flight mode.4. It is worth noting that having the exact location of the principal points which are obtained by GPS is so crucial in the absence of GCPs. Therefore, the navigation of these quadcopters should be very precise as it may cause a gap between photos or flight paths.5. The nDSM of both procedures, the height of some single-tree, is calculated with slightly larger error than normal, this uncertainty in estimation was due to the insufficient distance between the trees.Our research is not exhaustive and further steps should be taken in this research path. Finding how presented approaches work, helps researchers to better understand the concepts which culminate in reaching practical achievements in adopting UAS technology and increasing the productivity in response to forest management needs.With all these taken into account, the integration of UAS images with the inclusion of GCP in BBA indicates a reliable approach in tree height estimation. In order to reduce the GCPs’ requirements, the combination of flight plans should be planned coherently to promote the SfM workflow. Specifically, the combined usage of images extracted from two flight strips with various elevations and high front and lateral overlap provides a reliable solution for extracting tree height information in an area with heterogeneous terrain.