-
Paper Information
- Paper Submission
-
Journal Information
- About This Journal
- Editorial Board
- Current Issue
- Archive
- Author Guidelines
- Contact Us
American Journal of Computational and Applied Mathematics
p-ISSN: 2165-8935 e-ISSN: 2165-8943
2018; 8(3): 50-58
doi:10.5923/j.ajcam.20180803.02

Design of Unknown Inputs Observer for a Class of Discrete-Time Takagi-Sugeno Descriptor Models
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTMLKarim Bouassem1, 2, Jalal Soulami1, 2, Abdellatif El Assoudi1, 2, El Hassane El Yaagoubi1, 2
1Laboratory of High Energy Physics and Condensed Matter, Faculty of Science, Hassan II University of Casablanca, Casablanca, Morocco
2ECPI, Department of Electrical Engineering, ENSEM, Hassan II University of Casablanca, Casablanca, Morocco
Correspondence to: Jalal Soulami, Laboratory of High Energy Physics and Condensed Matter, Faculty of Science, Hassan II University of Casablanca, Casablanca, Morocco.
| Email: |  |
Copyright © 2018 The Author(s). Published by Scientific & Academic Publishing.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/

This paper addresses the problem of simultaneous estimation of unmeasurable states and unknown inputs (UIs) for a class of discrete-time nonlinear descriptor models (DNDMs) described by Takagi-Sugeno (T-S) structure with unmeasurable premise variables. The UIs affect both state and output of the system. The main idea of the proposed design of fuzzy unknown inputs observer (FUIO) is based on the separation between dynamic and static relations in T-S descriptor model. First, the method permitting to separate dynamic equations from static equations is developed. Next, based on the augmented fuzzy model which contains the dynamic equations and the UIs, a new FUIO design in explicit structure is given. The exponential convergence of the state estimation error is studied by using the Lyapunov theory and the stability conditions are given in terms of linear matrix inequalities (LMIs). Finally, an application to a DNDM of a single-link flexible joint robot is presented in order to illustrate the validity and applicability of the proposed method.
Keywords: Discrete-time nonlinear descriptor model, Discrete-time Takagi-Sugeno descriptor model, Unmeasurable premise variables, Unknown inputs, Fuzzy unknown input observer, LMI
Cite this paper: Karim Bouassem, Jalal Soulami, Abdellatif El Assoudi, El Hassane El Yaagoubi, Design of Unknown Inputs Observer for a Class of Discrete-Time Takagi-Sugeno Descriptor Models, American Journal of Computational and Applied Mathematics , Vol. 8 No. 3, 2018, pp. 50-58. doi: 10.5923/j.ajcam.20180803.02.
Article Outline
1. Introduction
- Many industrial processes as e.g. circuit systems, robotics, chemical processes, biological systems and so on, are naturally modelled as systems of differential and algebraic equations also called descriptor models or singular models or implicit models. Known as a generalization of standard models, such descriptor models constitute a powerful modeling tool allowing to describe the dynamic behaviour of processes. They represent physical phenomenas that can not be described by standard models. We may cite [1], [2], [3] for some real applications of implicit models. The numerical simulation of such models usually combines an ODE numerical method together with an optimization algorithm.On the other hand, ordinary T-S approach [4], [5] known as an interesting alternative for the analysis and controller/observer synthesis for nonlinear systems, finds its success on the fact that once the T-S fuzzy models are obtained, some analysis and design tools developed in the linear case can be used, which facilitates observer or/and controller synthesis for complex nonlinear systems see for example [6], [7] and the references therein. Moreover, notice that in [8], [9], a fuzzy implicit model is defined by extending the T-S fuzzy model [4]. In this paper, the aim is to consider the problem of FUIO design for a class of DTSDMs. Due to its important role in the area of fault detection and design of fault tolerant control strategy, the field of the FUIO design for nonlinear systems has attracted much attention from researchers during these last two decades. Indeed, many research works on fuzzy observer and its application to fault detection can be found in the literature. They relate to explicit and implicit nonlinear systems in both continuous-time and discrete-time cases. Concerning the continuous-time case, we may cite [10], [11], [12], [13], [14] for explicit models and [8], [9], [15], [16], [17], [18], [19], [20] for implicit models. Likewise, in discrete-time case, several works exist for explicit or implicit structures see e.g. [21], [22], [23], [24], [25], [26], [27]. It should be noted that, generally an interesting way to solve the various FUIO raised previously is to write the convergence conditions on the LMI form [28].Based on T-S fuzzy approach with unmeasurable premise variables, the main contribution of the paper consists in an observer design allowing the simultaneous estimation of the unknown states and unknown inputs for a class of DNDMs subject to unknown inputs affecting states and outputs of the system simultaneously. The idea is based on the separation between dynamic and static equations in the considering DTSDM and the use of an augmented system structure formed by dynamic equations and unknown inputs. The global exponential stability of the state estimation error of the augmented system is studied by using the Lyapunov theory and the stability conditions are given in term of LMIs. Besides, the proposed FUIO is given without the use of an optimization algorithm.The paper is organized as follows. The considered class of DNDMs subject to unknown inputs described by T-S fuzzy structure with unmeasurable premise variables is presented in Section 2. The main contribution about FUIO design permitting simultaneous estimation of unknown states and unknown inputs is stated in Section 3. To show the good performance of the proposed FUIO, an application of a single-link flexible joint robot is given in Section 4. Finally, a conclusion is given in section 5.In this paper, some notations used are fair standard. For example,
 means the matrix
means the matrix  is symmetric and positive definite.
is symmetric and positive definite.  denotes the transpose of
denotes the transpose of  . The symbol
. The symbol  (or 0) represents the identity matrix (or zero matrix) with appropriate dimension.
(or 0) represents the identity matrix (or zero matrix) with appropriate dimension. 
2. System Description
- In this paper, the aim is to consider the problem of FUIO design for a class of DNDMs subject to UIs described by T-S structure with unmeasurable premise variables. For this objective, the following class of DNDMs subject to UIs is adopted:
 | (1) |
 is the state vector with
is the state vector with  is the vector of difference variables,
is the vector of difference variables,  is the vector of algebraic variables with
is the vector of algebraic variables with  ,
,  is the control input,
is the control input,  is the unknown control input,
is the unknown control input,  is the measured output.
is the measured output.  ,
,  ,
,  ,
,  ,
,  ,
,  are nonlinear matrices functions.
are nonlinear matrices functions.  such that
such that  is a real known constant matrix with:
is a real known constant matrix with: | (2) |
 | (3) |
 , are real known constant matrices with:
, are real known constant matrices with: | (4) |
 are supposed invertible. q is the number of sub-models. The
are supposed invertible. q is the number of sub-models. The  are the weighting functions that ensure the transition between the contribution of each sub model:
are the weighting functions that ensure the transition between the contribution of each sub model: | (5) |
 | (6) |
 is regular, i.e.
is regular, i.e.  • All sub-models (5) are impulse observable and detectable.In order to investigate the Fuzzy UIO design for system (3), we proceed as mentioned above to the separation of the dynamic equations from static equations of the model (3). Indeed, from (2)-(4), sub-model (5) can be rewritten as follows:
• All sub-models (5) are impulse observable and detectable.In order to investigate the Fuzzy UIO design for system (3), we proceed as mentioned above to the separation of the dynamic equations from static equations of the model (3). Indeed, from (2)-(4), sub-model (5) can be rewritten as follows: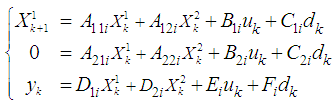 | (7) |
 is invertible, it follows:
is invertible, it follows: | (8) |
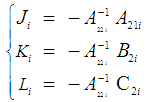 | (9) |
 | (10) |
 | (11) |
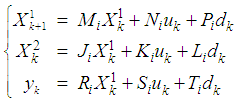
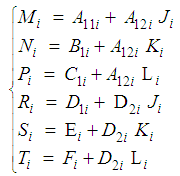
 can be rewritten as:
can be rewritten as: | (12) |
 .So, by aggregation of the resulting sub-models (10), the following global fuzzy model is obtained:
.So, by aggregation of the resulting sub-models (10), the following global fuzzy model is obtained: | (13) |
 is considered as a constant unknown control input per time interval i.e.:
is considered as a constant unknown control input per time interval i.e.: | (14) |
 and
and  . Thus, the system (13) can be represented as:
. Thus, the system (13) can be represented as: | (15) |
 | (16) |
3. Main Result
- Based on the transformation of the T-S descriptor system (3) into the equivalent form (15), the proposed FUIO permitting the estimate of unmeasurable state and unknown inputs takes the following form:
 | (17) |
 ,
,  and
and  denote the estimated augmented state vector, the output vector and the decision variable vector respectively.
denote the estimated augmented state vector, the output vector and the decision variable vector respectively.  are the observer gains which are determined such that
are the observer gains which are determined such that  asymptotically converges to
asymptotically converges to  . In order to establish the conditions for the asymptotic convergence of the observer (17), we define the state estimation error:
. In order to establish the conditions for the asymptotic convergence of the observer (17), we define the state estimation error: | (18) |
 is given by the differential and algebraic equations:
is given by the differential and algebraic equations: | (19) |
 | (20) |
 toward zero, it suffices to prove that
toward zero, it suffices to prove that  converges to zero. So, using the fact that:
converges to zero. So, using the fact that: | (21) |
 and
and  .Hence, the first equation of (20) becomes:
.Hence, the first equation of (20) becomes: | (22) |
 , equality (22) can be written as follows:
, equality (22) can be written as follows: | (23) |
 and
and  can be written as follows:
can be written as follows: | (24) |
 and
and  .By substituting (24) in (23), we obtain:
.By substituting (24) in (23), we obtain: | (25) |
 | (26) |
 , then from (15) and (25) we have:
, then from (15) and (25) we have: | (27) |
 | (28) |
 to ensure the stability of the system (27). Therefore, the convergence conditions of (17) can be formulated by the following Theorem.Theorem 1: Under above Assumptions 1 and 2, the state estimation error between the DTSDM (3) and its FUIO (17) converges exponentially asymptotically towards zero, if given
to ensure the stability of the system (27). Therefore, the convergence conditions of (17) can be formulated by the following Theorem.Theorem 1: Under above Assumptions 1 and 2, the state estimation error between the DTSDM (3) and its FUIO (17) converges exponentially asymptotically towards zero, if given  there exist matrices
there exist matrices  and
and 
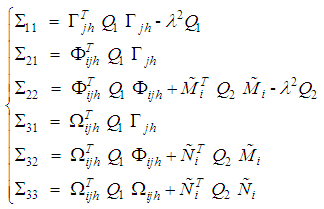
 such that the following LMIs hold:
such that the following LMIs hold: | (29) |
 | (30) |
 | (31) |
 | (32) |
 | (33) |
 | (34) |
 | (35) |
 | (36) |
 can be reduced as follows:
can be reduced as follows: | (37) |
 | (38) |
 | (39) |
 | (40) |
4. Application to Single-Link Flexible Joint Robot
- In this section, the proposed FUIO design (17) is applied to a single-link flexible joint robot in order to estimate on-line these unknown states and its UI simultaneously. The following DNDM that we consider here is obtained by Euler discretisation of the model given in [19]. It takes the form:
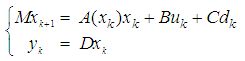 | (41) |
 is the state vector with
is the state vector with  and
and  are the angles of rotations of the motor and the link respectively.
are the angles of rotations of the motor and the link respectively.  and
and  are their angular velocities.
are their angular velocities.  and
and  are their angular accelerations.
are their angular accelerations.  is the control variable,
is the control variable,  is the output measurement vector and
is the output measurement vector and  is the unknown input variable.
is the unknown input variable. 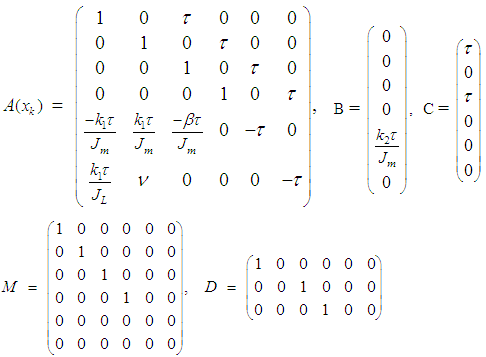 where
where  is sampling time and
is sampling time and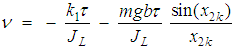 | (42) |
 of the
of the  . Then, we can transform the nonlinear term under the following shape:
. Then, we can transform the nonlinear term under the following shape: | (43) |
 | (44) |
 | (45) |
 The weighting functions are given by:
The weighting functions are given by: | (46) |
 and
and  , we shall show that the previous result (17) can be used to the on-line estimation of the unknown states
, we shall show that the previous result (17) can be used to the on-line estimation of the unknown states  and the UI
and the UI  simultaneously. To this end, let:
simultaneously. To this end, let: Notice that in this case
Notice that in this case  are invertible. This shows that model (45) is a particular case of model (3) with
are invertible. This shows that model (45) is a particular case of model (3) with  . Consequently, apply the theory developed in the Section 2 (see (7) to (15)), model (45) is written as follows:
. Consequently, apply the theory developed in the Section 2 (see (7) to (15)), model (45) is written as follows: | (47) |
 | (48) |
 are given in the above equations (9) and (16).Then using Section 3, the FUIO for model (45) (see its equivalent model (47)) permitting to estimate simultaneously
are given in the above equations (9) and (16).Then using Section 3, the FUIO for model (45) (see its equivalent model (47)) permitting to estimate simultaneously 
 and the UI
and the UI  takes de following form:
takes de following form: | (49) |
 are given by equation (31).For all the results of computer simulations discussed below, we use the physical parameters whose definitions and numerical values are given in [19] and we assume
are given by equation (31).For all the results of computer simulations discussed below, we use the physical parameters whose definitions and numerical values are given in [19] and we assume  . The expression of the unknown input signal is defined as in Figure 1.Thus, by Theorem 1 with
. The expression of the unknown input signal is defined as in Figure 1.Thus, by Theorem 1 with  the following observer gains
the following observer gains  and
and  are obtained:
are obtained: Simulation results with initial conditions:
Simulation results with initial conditions: are given in Figures 1 to 7. These simulation results show the performances of the proposed FUIO (17) with the gains
are given in Figures 1 to 7. These simulation results show the performances of the proposed FUIO (17) with the gains  where the dashed lines denote the state variables and unknown input estimated by the fuzzy observer. They show that the observer gives a good estimation of unknown states and unknown input of the considered robot.
where the dashed lines denote the state variables and unknown input estimated by the fuzzy observer. They show that the observer gives a good estimation of unknown states and unknown input of the considered robot.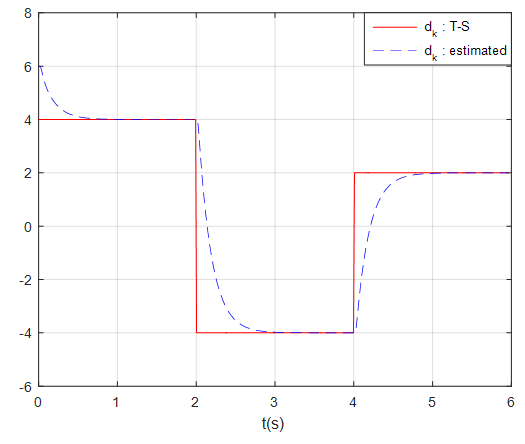 | Figure 1. Unknown input dk and its estimate |
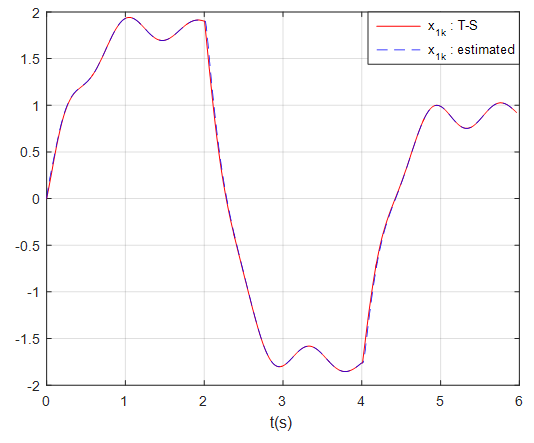 | Figure 2. State variables x1k and its estimate |
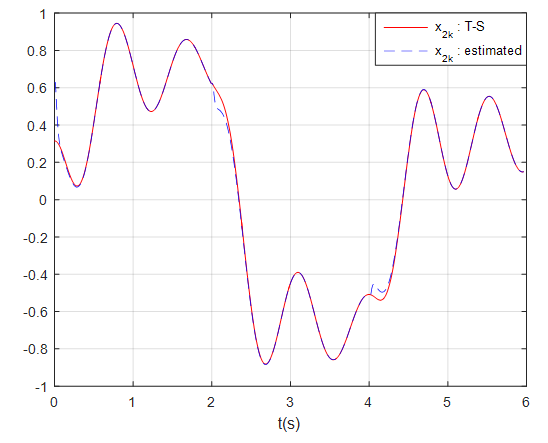 | Figure 3. State variables x2k and its estimate |
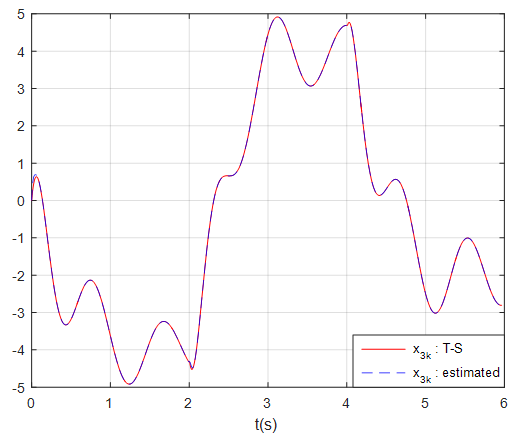 | Figure 4. State variables x3k and its estimate |
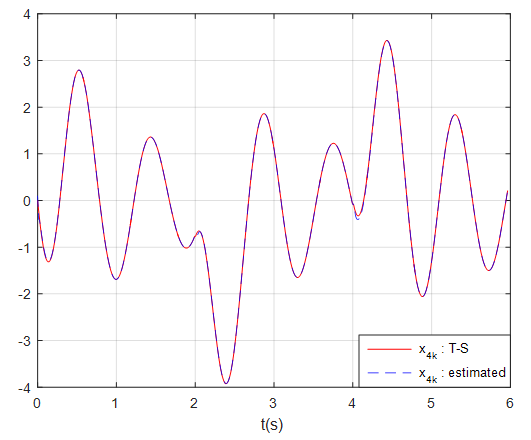 | Figure 5. State variables x4k and its estimate |
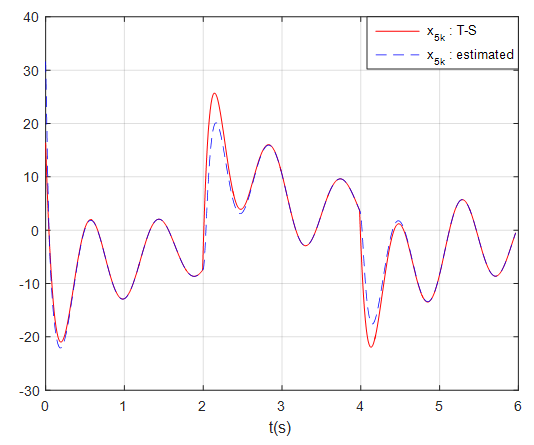 | Figure 6. State variables x5k and its estimate |
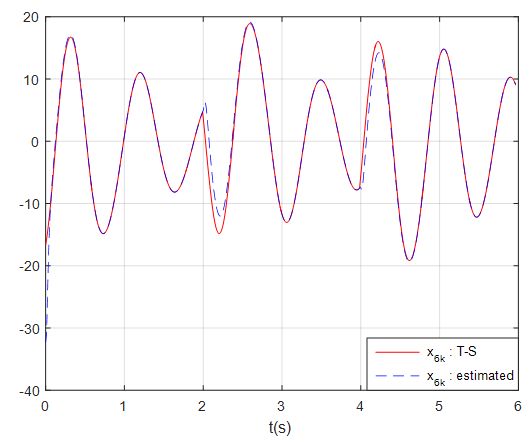 | Figure 7. State variables x6k and its estimate |
5. Conclusions
- In order to estimate simultaneously the unknown state and unknown inputs for a class of DNDMs described by T-S fuzzy structure with unmeasurable premise variables, a new FUIO design without the use of an optimization algorithm is proposed in this paper. The main idea is based on the separation between dynamic and static relations in the DTSDM and the use of an augmented system structure formed by dynamic equations and unknown inputs. The global exponential stability of the state estimation error is studied by using the Lyapunov theory and the conditions ensuring this stability are expressed in term of LMIs. In order to demonstrate the good performance of the proposed result, a DNDM of a single-link flexible joint robot is considered. The effectiveness of the proposed FUIO for the on-line estimation of unknown states and unknown inputs of the used model is verified by numerical simulation.