Ibrahim Yusuf1, U. A. Ali2, Mansur Babagana3, Bello Gimba2
1Department of Mathematical Sciences, Bayero University, Kano, Nigeria
2Department of Mathematics, Federal University, Dutse, Nigeria
3Department of Computer Science, Bayero University, Kano, Nigeria
Correspondence to: U. A. Ali, Department of Mathematics, Federal University, Dutse, Nigeria.
| Email: |  |
Copyright © 2015 Scientific & Academic Publishing. All Rights Reserved.
Abstract
In this paper, we study the mean time to system failure of three dissimilar redundant systems consisting of two subsystems A and B in series each. System I consists of Subsystem A containing two units A1 and A2 in cold standby, subsystem B has two units B1 and B2 unit in cold standby and with one external supporting unit connected to subsystems A and B. System II consists of Subsystem A containing two units A1 and A2 in cold standby, subsystem B has two units B1 and B2 unit in cold standby and with two external supporting units, one connected each to subsystems A and B. System III consists of Subsystem A containing two units A1 and A2 in active parallel, subsystem B contains two units B1 and B2 unit in cold standby and with two external supporting units, one connected each to subsystems A and B. The systems are analyzed using Kolmogorov forward equation method. Explicit expressions for mean time to system failure are derived. Comparisons are made analytically and numerically to determine the optimal configuration.
Keywords:
Mean time to system failure,Supporting device, Operation
Cite this paper: Ibrahim Yusuf, U. A. Ali, Mansur Babagana, Bello Gimba, Probabilistic Models for MTSF Comparison between Systems Connected to Supporting Device for Operation, American Journal of Computational and Applied Mathematics , Vol. 5 No. 5, 2015, pp. 140-146. doi: 10.5923/j.ajcam.20150505.02.
1. Introduction
With advancement of modern science and technology, complex systems have been manufactured to meet the demand of industries, economic growth and populace in general. Companies and organizations heavily rely on these systems to conduct their business. Due to their importance in promoting and sustaining industries and economy, reliability measures of such systems have become an area of interest. Among the reliability measures of interest are, the steady-state availability, busy period, profit function and mean time to system failure, (MTSF). Modelling the reliability and availability of the system is important because it will assist in diagnosing the best time to carry out a preventive maintenance which leads to increase in mean time to system failure and availability of a system and related profit. Reliability modeling and analysis of complex systems have drawn the attention different researchers. [3] Investigated multi-objective reliability redundancy allocation series-parallel problem using efficient epsilon-constraint. [4] Proposed multi-objective particle swarm optimization method for solving reliability redundancy allocation problems.Many research results have been reported on the analysis and comparison of reliability measures mention above. [1] studied MTSF and cost effectiveness of 2-out-of-3 cold standby system with probability of repair and inspection, [2] have analyzed the Availability of k-out-of-n: G systems with non identical components subject to repair priorities, [5] performed computational comparisons of confidence intervals for the steady-state availability of a repairable system, [6] performed comparative analysis between two unit cold standby and warm standby outdoor electric power systems in changing weather. [7] performed comparative analysis of availability between three systems with general repair times, reboot delay and switching failures. [8] performed comparative analysis of availability between two systems with warm standby units and different imperfect coverage. [9] Performed comparative analysis of some reliability characteristics between redundant systems requiring supporting units for their operation. [10] Have analyzed the mean time to system failure of 2-out-of-4 warm standby system attended repair machines and repairmen while [11] performed comparative analysis of profit between three dissimilar repairable redundant systems using supporting external device for operation.The present paper is devoted to deal with mean time to system failure (MTSF) comparison between three dissimilar redundant systems that worked with the help of an external supporting device. Explicit expressions for mean time to system failure have been developed. Analytical and numerical investigation on the optimal configuration has been performed.
2. Notations, Description and States of the Systems
 : Repair rate of unit
: Repair rate of unit  for both systems,
for both systems, 
 : Repair rate of unit
: Repair rate of unit  for both systems,
for both systems, 
 : Failure rate of unit
: Failure rate of unit  for both systems,
for both systems, 
 : Failure rate of unit
: Failure rate of unit  for both systems,
for both systems, 
 : Repair rate of the supporting unit for both systems
: Repair rate of the supporting unit for both systems : Failure rate of the supporting unit for both systems
: Failure rate of the supporting unit for both systems : Probability row vector
: Probability row vector  : Probability that the system is in state
: Probability that the system is in state 
3. Mean Time to System Failure Models Formulation
Let  to be the probability that the systems at time
to be the probability that the systems at time  are in the states
are in the states  for system I,
for system I,  for System II and
for System II and  for System III. Also let
for System III. Also let  ,
,  be the probability row vector at time
be the probability row vector at time  , we have the following initial conditions for system I, II and III respectively:
, we have the following initial conditions for system I, II and III respectively:
3.1. Mean Time to System Failure of System I
Let  to be the probability that the systems at time
to be the probability that the systems at time  are in the states
are in the states  and
and  be the probability row vector for system I with the following differential equations.
be the probability row vector for system I with the following differential equations.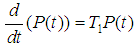 | (1) |
where
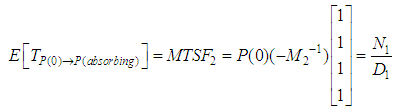
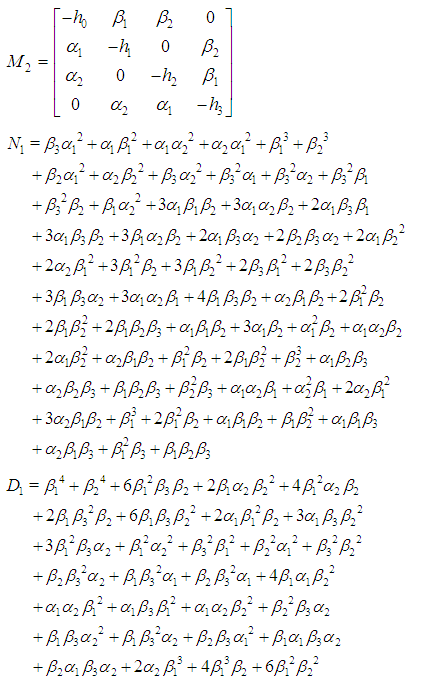
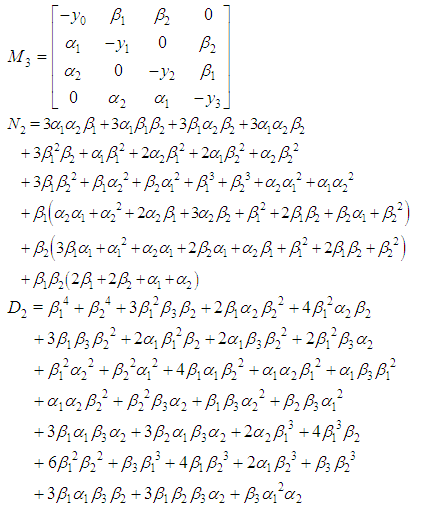
 It is difficult to evaluate the transient solutions, the procedure to develop the explicit expression for
It is difficult to evaluate the transient solutions, the procedure to develop the explicit expression for  is to delete the fifth, sixth and seventh rows and fifth, sixth and seventh column of matrix
is to delete the fifth, sixth and seventh rows and fifth, sixth and seventh column of matrix  and take the transpose to produce a new matrix, say
and take the transpose to produce a new matrix, say  . The expected time to reach an absorbing state is obtained from
. The expected time to reach an absorbing state is obtained from  | (2) |
where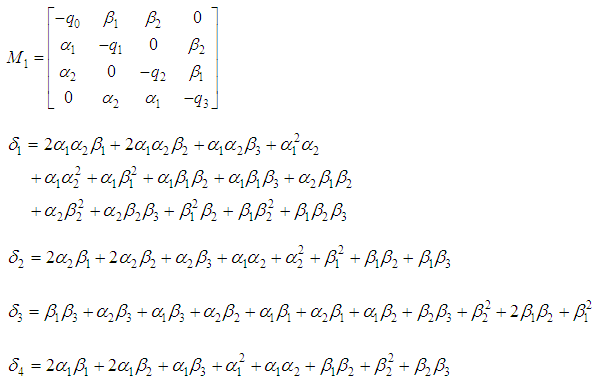
3.2. Mean Time to System Failure Analysis of System II
Let  to be the probability that the systems at time
to be the probability that the systems at time  are in the states
are in the states  and
and  be the probability row vector for system II with the following differential equations.
be the probability row vector for system II with the following differential equations.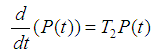 | (3) |
where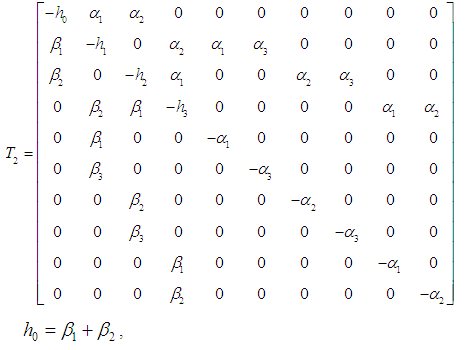
 ,Following the procedure used in computing
,Following the procedure used in computing 
 | (4) |
3.3. Mean Time to System Failure Analysis of System III
Let  to be the probability that the systems at time
to be the probability that the systems at time  are in the states
are in the states  and
and  be the probability row vector for system II with the following differential equations.
be the probability row vector for system II with the following differential equations.  be the probability row vector for system II with the following differential equations.
be the probability row vector for system II with the following differential equations.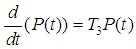 | (5) |
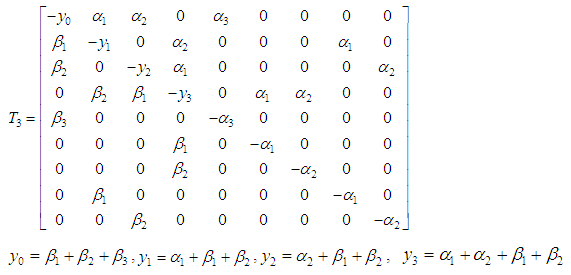 Following the procedure used in computing
Following the procedure used in computing  , the expected time to reach an absorbing state is obtained from
, the expected time to reach an absorbing state is obtained from  | (6) |
4. Comparative Analysis
The purpose of this section is to present analytical and numerical comparisons for the mean time to system failure between the systems using MAPLE and MSTLAB software. Five different cases are presented below: Cases I – IV are analytical comparison between the systems while case V is the numerical comparison.Case I: Comparison  when
when  and
and 
 | (7) |
 | (8) |
 | (9) |
 Equations (7), (8) and (9) are too spacious to be shown here. From (7), (8) and (9)
Equations (7), (8) and (9) are too spacious to be shown here. From (7), (8) and (9) Case II: Comparison
Case II: Comparison  when
when 
 | (10) |
 | (11) |
 | (12) |
 From (10), (11) and (12)
From (10), (11) and (12) Case III: Comparison
Case III: Comparison  when
when 
 | (13) |
 | (14) |

 | (15) |
 From (13), (14) and (15)
From (13), (14) and (15) while the sign of
while the sign of  depend on
depend on  Case IV: Comparison
Case IV: Comparison  when
when  and
and 
 | (16) |

 | (17) |

 | (18) |
 From (16), (17) and (18)
From (16), (17) and (18) Case V: The objective here is to present specific numerical comparisons for the mean time to system failure. In this part, we numerically compare the results for mean time to system failure for all the developed models. For each model the following set of parameters values are fixed throughout the simulations for consistency:
Case V: The objective here is to present specific numerical comparisons for the mean time to system failure. In this part, we numerically compare the results for mean time to system failure for all the developed models. For each model the following set of parameters values are fixed throughout the simulations for consistency: 

 From Figures 1 the MTSF results for the three systems being studied against the repair rate
From Figures 1 the MTSF results for the three systems being studied against the repair rate  . It is clear from the figure that it is clear that system I has higher MTSF with respect to
. It is clear from the figure that it is clear that system I has higher MTSF with respect to  as compared with the other two systems. The differences between the MTSF of system I and the other two systems widens as
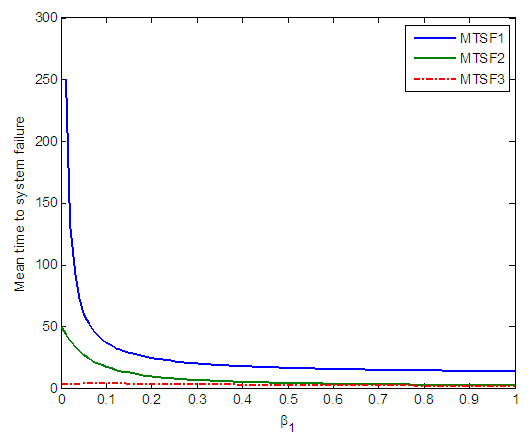
as compared with the other two systems. The differences between the MTSF of system I and the other two systems widens as  increases. These tend to suggest that system I is better than the other systems. Figure 2 depicts the MTSF calculations for the three systems against
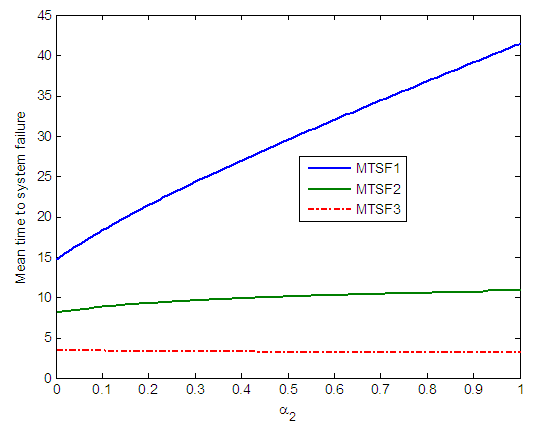
increases. These tend to suggest that system I is better than the other systems. Figure 2 depicts the MTSF calculations for the three systems against  . The observations that can be made here are much similar to those made on Figure 1. Figure 3 shows the MTSF results for the three systems being studied against the repair rate
. The observations that can be made here are much similar to those made on Figure 1. Figure 3 shows the MTSF results for the three systems being studied against the repair rate  . It is clear from the figure that it is clear that system I has higher MTSF with respect to
. It is clear from the figure that it is clear that system I has higher MTSF with respect to  as compared with the other two systems. The differences between the MTSF of system I and the other two systems widens as
as compared with the other two systems. The differences between the MTSF of system I and the other two systems widens as  increases. There is slight difference between the MTSF of system II and that of system III with respect to
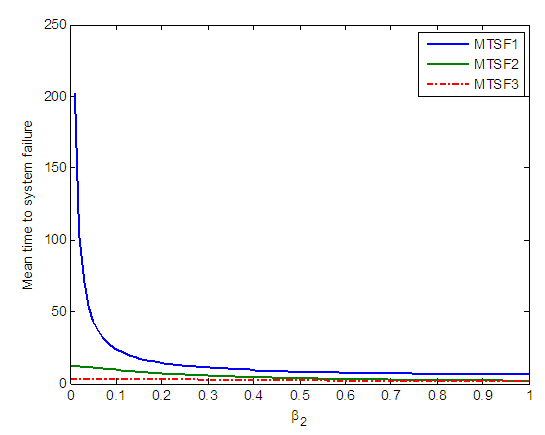
increases. There is slight difference between the MTSF of system II and that of system III with respect to  . It is evident here that system I is has higher MTSF than systems II and III. From Figures 4, it can be seen that the MTSF of system I decreases much slower than those of the other two systems with increase in
. It is evident here that system I is has higher MTSF than systems II and III. From Figures 4, it can be seen that the MTSF of system I decreases much slower than those of the other two systems with increase in  . By comparing systems II and III, it can be observed that there is slight difference between the two. System III is decreasing a little faster than system II with respect to
. By comparing systems II and III, it can be observed that there is slight difference between the two. System III is decreasing a little faster than system II with respect to  . We can conclude as before that system I is better than the other two systems in all the three figures.
. We can conclude as before that system I is better than the other two systems in all the three figures.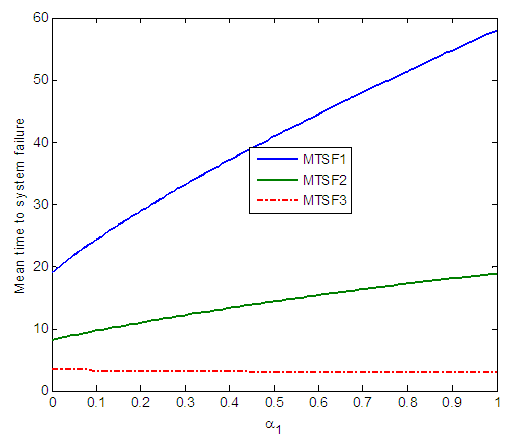 | Figure 1. MTSF against  |
 | Figure 2. MTSF against  |
 | Figure 3. MTSF against  |
 | Figure 4. MTSF against  |
5. Conclusions
In this paper, we studied three dissimilar systems each consisting of two subsystems A and B each containing two units with supporting unit attached to the systems. We first formulated models three different repairable redundant systems that used an external supporting device for their operation and obtained the explicit expressions for mean time to system failure (MTSF) for each system and performed comparative analysis analytically and numerically to determine the optimal system. It is evident from case I to V that system I is better than the other two systems. The study of mean time to system measures will help the engineers and designers to develop sophisticated models and to design more critical system in interest of human kind.
References
| [1] | Bhardwj, R.K., and S.C. Malik. (2010). MTSF and Cost effectiveness of 2-out-of-3 cold standby system with probability of repair and inspection. Int. J. of Eng. Sci. and Tech. 2(1), 5882-5889. |
| [2] | Khatab, A., Nahas, N., and Nourelfath, M., (2009). Availability of k-out-of-n: G systems with non identical components subject to repair priorities, Reliab. Eng. Syst. Safety. 94, 142-151. |
| [3] | Khalili-Damghani K, Amiri M (2012) Solving binary-state multi-objective reliability redundancy allocation seriesparallel problem using efficient epsilonconstraint, multi-start partial bound enumeration algorithm, and DEA. Reliability Engineering and system safety103: 35-44. |
| [4] | Khalili-Damghani K, Abtahi AR, Tavana M (2013) A new multi-objective particle swarm optimization method for solving reliability redundancy allocation problems, Reliability Engineering and system safety 111:58-75. |
| [5] | Ke, J.C. and Chu, Y.K. (2007). Comparative analysis of availability for a redundant repairable system. Applied Mathematics and Computation, 188, pp 332-338. |
| [6] | Mokaddis, G.S., El Sherbeny, M.S. and Al-Esayey, Entesar. (2010). Compare between two unit cold standby and warm standbyb outdoor electric power systems in changing weather, Journal of Mathematics and Statistics, 6(1), 17-22. |
| [7] | Wang, K.H. and Chen, Y.J. (2009). Comparative analysis of availability between three systems with general repair times, reboot delay and switching failures, Applied Mathematics and Computation, 215, 384-394. |
| [8] | Wang, K,-H., Yen, T,-C. and Fang, Y,-C. (2012). Comparison of Availability between two systems with warm standby units and different imperfect coverage, Quality technology and quantitative management, 9(3), pp 265-282. |
| [9] | Yusuf, I. (2013). Comparison of some reliability characteristics between redundant systems requiring supporting units for their operation. Journal of Mathematical and Computational Sciences, 3(1), pp 216-232. |
| [10] | Yusuf, I. and Bala, S.I. (2013). Modeling and Evaluation of MTSF of a repairable 2-out-of-4 warm standby system attended by repair machines and repairmen, Engineering Mathematics Letters, 2(2), 81-89. |
| [11] | Yusuf, I. (2014). Comparative analysis of profit between three dissimilar repairable redundant systems using supporting external device for operation, Journal of Industrial Engineering International, Vol. 10, No. 77, 2-9, DOI 10.1007/s40092-014-0077-3. |
 Abstract
Abstract Reference
Reference Full-Text PDF
Full-Text PDF Full-text HTML
Full-text HTML